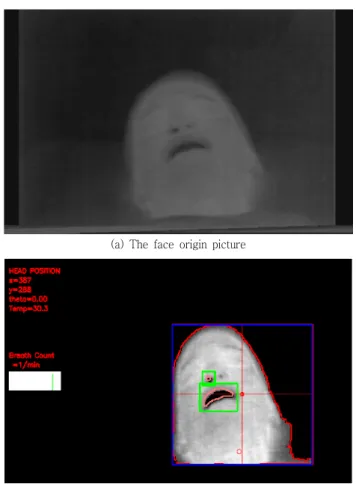
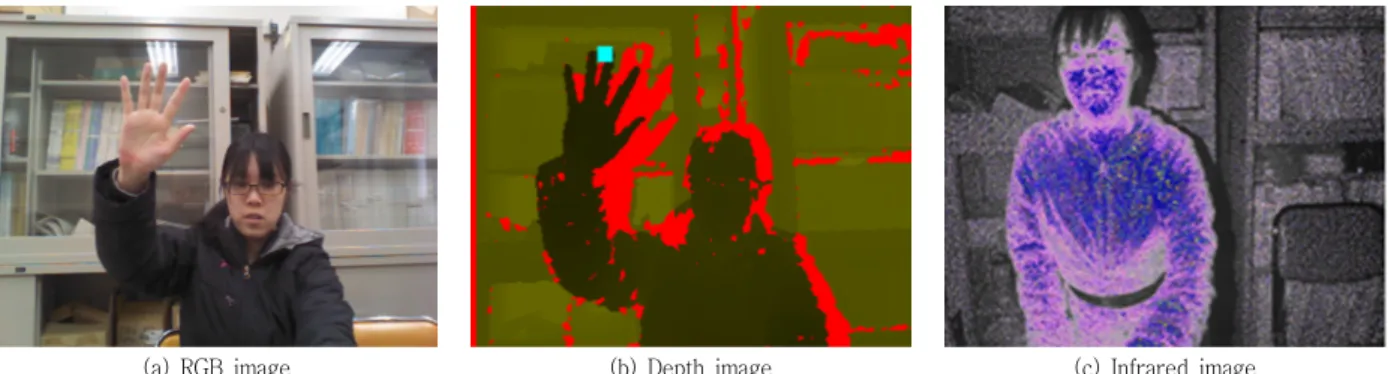
monitoring system for nursing person
Ai Ichiki
*,†․ Hidetoshi Sakamoto
*․ Yoshifumi Ohbuchi
**
전체 글
*
수치

관련 문서
• Various types take different amount of memory and some pointer operations require knowledge of that size... Pointers:
indicated input stream fgets( char *s, int n, FILE *) Address of the string/NULL pointer. fputs() Writes the character string pointed to
– This line announces that the program uses a type void function called starbar() & compiler expect to find the definition for this function elsewhere.. May put
The purpose of the study is to develop a sensor data collection and monitoring system with database using IoT techrology and to apply the ststem to three
In this paper, a methodology for estimating the parameters of non-linear system including stabilizing system(Night Vision Pedestal System) was presented.. To
This thesis implements the intelligent image surveillance system based on embedded modules for detecting intruders on the basis of learnt information, detecting fires on the
In this paper, we developed a data management system for shipboard machinery equipment and the monitoring application for the verification of the utility, and we
In this thesis, P controller for pitch controller of outer loop control system and PD controller for fin controller of inner loop control system are

