Vol.14, No.5, pp.9-17 (2020)
서 서 론론 11..
쿼드콥터 무인항공기가 산업용으로 다수 활용되면서 무인항공기 경로계획 연구의 중요성이 증대되고 있다.
산업용 무인항공기는 도심 공단 항만 등과 같이 다양, , 한 형상과 크기의 장애물이 집적된 산업현장에서 운용 되는데 효과적으로 임무를 수행하기 위해서는 지형정,
보 임무 중요도 무인항공기 동적 특성 등을 고려한 , , 경로 최적화가 요구된다 특히 현재 상용화된 쿼드콥. 터 무인항공기는 제한된 연료 및 비행효율 문제로 인 해 실질적인 임무 수행시간이 30분 남짓이다 즉 무. , 인항공기는 제한된 연료로 임무를 완수해야하므로 경 로계획시 속도 및 비행에 따른 소모 에너지를 필수적 으로 고려해야 한다.
이동로봇 경로계획 연구 사례는 다음과 같다 고하. 윤 등은 VFH와 Modified RRT*-Smart 알고리즘을 이용하여 무인항공기 차원 경로계획을 수행한 바 있2 다 [1]. N. Ganganath, S. Dogru, S. Liu 등은 지상
쿼드콥터 소모 에너지를 비용함수로 하는 차원 경로계획3
김효원
1· 정진석
1· 강범수
1,†1부산대학교
Three-dimensional Energy-Aware Path Planning for Quadcopter UAV
Hyowon Kim
1, Jinseok Jeong
1and Beomsoo Kang
1,1Pusan National University
Abstract
Mobile robots, including UAVs perform missions with limited fuel. Therefore, the energy-aware path planning is required to maximize efficiency when the robot is operated for a long time. In this study, we estimated the power consumption for each maneuver of a quadcopter UAV in the 3D environment and applied to the cost functions of D* Lite. The simulations were performed in a 3D environment that is similar to the industrial sites. The efficiency of path generation was high when the energy-aware path planning with simplified heuristic was applied. In addition, the energy-aware path was generated 19.3 times faster than the shortest path with a difference within 3.2%.
초 초 록록
무인항공기를 비롯한 다수의 이동로봇은 제한된 연료로 임무를 수행하므로 장시간 운용시 효율을 극 대화 하기위해 에너지를 고려한 경로계획이 요구된다 본 연구에서는 차원 환경에서 쿼드콥터 무인항. 3 공기 비행에 따른 소모 에너지를 근사화하여 기존 D* Lite 알고리즘의 비용함수에 적용하였다 산업현장. 과 유사한 차원 환경에서 시뮬레이션을 수행한 결과 에너지를 비용함수로 하고 휴리스틱 계산을 단순3 화 하였을 때 경로 생성 효율이 높았으며 최단경로와 약 , 3.2% 이내의 차이를 갖는 경로를 최대 19.3배 빠르게 도출했다.
Key Words : Quadcopter UAV(쿼드콥터 무인항공기), Energy Consumption(에너지 소모), 3D Path
차원 경로계획 휴리스틱
Planning(3 ), Heuristic( ), D* Lite
Received: Oct. 08, 2019 Revised: Aug. 30, 2020 Accepted: Sep. 05, 2020 Corresponding Author
The Society for Aerospace System Engineering
주행로봇에 작용하는 중력 마찰력 지형 등을 비용함, , 수로하는 경로계획 알고리즘을 제안하고 시뮬레이션을 통해 보다 현실적인 경로 계획이 가능함을 보여주었다
등은 실험 [2-4]. C. D. Franco, S. Ahmed, L. Ding
을 통해 쿼드콥터 무인항공기의 속도 및 비행에 따른 소모 에너지 모델을 얻어 에너지를 최소화하는 경로계 획을 수행하였으며[5-7], K. Zhu, M. B. Ghorbel 등 은 무인항공기에 장착된 센서로 인한 소모 에너지와 센서의 특성을 고려한 경로계획을 수행한 바 있다
또한 는 군집비행하는 다양한 종류
[8-9]. M. Monwar
의 쿼드콥터 무인항공기의 각 배터리 용량 통신거리, 에 따른 요구 전력 변화 등 에너지 소모에 영향을 미 치는 다양한 요인을 고려한 경로계획 연구를 수행하였 다[10]. 그러나 국내에서는 아직 무인항공기의 소모 에너지를 고려한 경로계획 연구가 미미한 실정이다.
본 연구에서는 쿼드콥터 무인항공기의 비행에 따른 소모 에너지를 고려한 경로계획을 수행하였다 에너지 . 모델은 S. Ahmed의 연구를 참조하여 차원 환경에서 3 가능한 쿼드콥터 무인항공기의 비행에 따른 소모 에너 지를 정의하고 D* Lite 알고리즘의 비용함수에 적용하 였다[6]. D* Lite는 비용함수 최적화가 보장되며 불확 실성이 존재하는 환경에서도 목표 지향 경로계획이 가 능하다[11]. 따라서 복잡하고 다수의 불확실성이 존재 하는 산업현장에 적합하다. 3차원 환경에서의 시뮬레 이션을 통해 거리를 비용함수로 하는 기존 D* Lite로 생성된 경로와 에너지를 비용함수로 하는 경로를 비교 하였다 두 경로간 경로 길이 및 요구 에너지 차이가 . 크게 나지않았으나 연산시간과 확장 노드수에서 에너 지를 고려한 경로가 적은 노드 확장으로 빠르게 경로 를 생성하는 경향을 보였다 또한 에너지 기반 경로계. 획시 휴리스틱 계산을 단순화할 경우 경로 생성 효율 이 개선되는 경향을 보였다.
경
경로로계계획획 알알고고리리즘즘 22..
22..11 DD** LLiittee 알알고고리리즘즘
D* Lite는 비용함수 최적화가 보장되는 노드기반 알 고리즘이며, 지형정보가 부족한 환경에서 목표 지향 탐색을 수행한다 또한 신속한 경로 재계획이 가능하. 다는 특징이 있다 따라서 다수의 장애물 및 불확실성.
이 존재하는 비행환경에 적합하다.
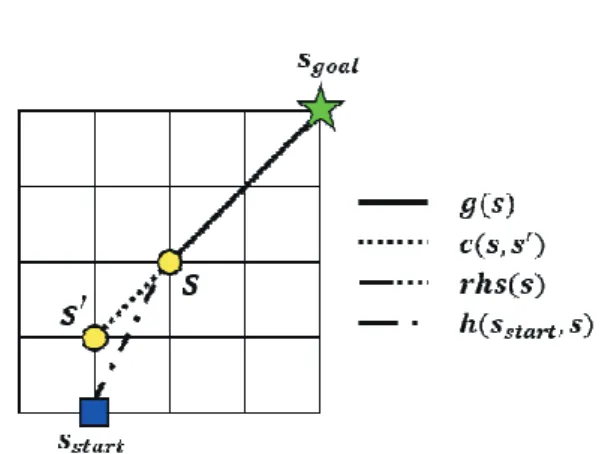
D* Lite는 노드 확장을 통해 비용함수 최적화 여부 판단 후 경로를 생성한다 즉. , D* Lite는 거리를 비용 함수로 하므로 최단경로가 존재한다고 판단되면 경로 를 생성한다. D* Lite의 비용함수는 Fig. 1과 같다.
는 로 목표점
g-value goal-distance , ()에서 노드 까지 이동한 거리를 의미한다. rhs-value(right hand
는 과 같이 계산되는데
side-value) Eq. 1 , D* Lite는 목표점에서 시작되므로 이 항상 이다 목표0 . 점을 제외한 노드의 rhs-value는 자식노드 으로 출발점, ()과 노드 간 거리의 어림값이다.
Fig. 1 Cost functions of D* Lite algorithm
D* Lite는 노드의 g-value와 rhs-value를 비교하여 를 판단한다 두 값이 같을 경우
‘consistency’ . ‘locally 두 값이 다를 경우
consistent’, ‘locally inconsistent’
라 한다. Inconsistent로 판단된 노드는 OPEN 리스트 에 추가되어 노드 확장시 선택될 수 있는 후보 노드가 된다 선택된 노드는 . OPEN 리스트에서 제거되고 해당 노드의 g-value는 rhs-value로 갱신되어 consistent한 상태가 된다 즉. , D* Lite는 inconsistent 상태인 목표 점에서 시작되어 출발점에 도달할 때 까지 노드 확장 을 통해 선택된 노드를 consistent한 상태로 갱신한다. 리스트에서 노드를 선택하는 기준은 OPEN
이다
key-value . key-value는 Eq. 2, 3으로 구성된 의 형태로 저장된다
Eq. 4 . m은 경로 재계획시 사용되 는 값으로 초기값은 이고 경로비용이 바뀔 때 마다 , 0
와 같이 갱신된다
Eq. 5 . 는 옮기기 직전 노드,
는 경로비용이 바뀐 노드이다 알고리즘이 목표점에서 . 시작되어 노드 확장을 통해 출발점이 consistent한 상 태가 되고, 동시에 출발점의 key-value가 모든
한 노드의 보다 작을 경우 최단 inconsistent key-value
경로가 존재한다 최단경로가 존재한다고 판단되면 출. 발점에서 목표점까지 Eq. 6을 만족하는 이웃 노드를 선택함으로써 경로를 생성한다.
key min m (2)
key min (3)
Key key key (4)
m m (5)
차
차원원 환환경경에에서서의의
22..22 33 DD** LLiittee
D* Lite는 차원 기반 알고리즘이므로 차원 그리2 3 드맵에 적용하기 위해 비용함수 및 노드 탐색 범위를
차원으로 확장해야 한다 크기가
3 . × × 인 그리드
맵에 적용할 경우 g-value, rhs-value, 휴리스틱이 저 장되는 행렬의 크기는 × × 이 된다 임의의 노드 .
, 간 거리 는 Eq. 7과 같이 계산되며, 3차원 환경에서 두 노드간 이동 비용 ()과 휴리스틱()을 이와 동일하게 계산 한다. m은 상수이므로 차원과 무관하다.
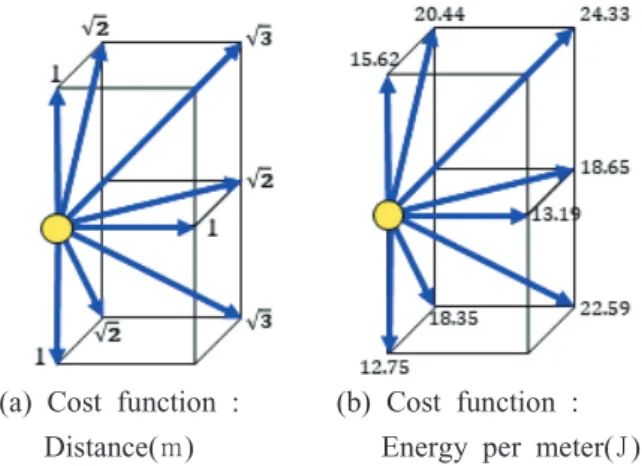
현재 노드 주변에 장애물이 존재하지 않을 경우 와 같이 개의 이웃노드가 존재하며 노드 확
Fig. 2 26 ,
장시 26개의 이웃노드 중 하나를 선택하게 된다.
(7)Fig. 2 Example of 3D grid map and neighbor nodes
비 비용용함함수수 33..
쿼
쿼드드콥콥터터 에에너너지지 모모델델 33..11
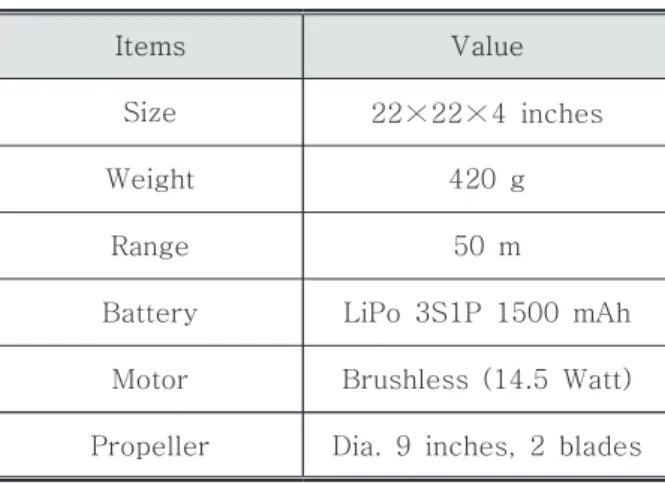
쿼드콥터 에너지 모델은 Shaimaa Ahmed가 Parrot 사의 AR.Drone을 대상으로 실험한 결과를 참조하였 다. AR. Drone의 제원과 각 비행 시 소모 에너지는
와 같다 본 연구에서는 무인항공기가 Table 1, 2 [7].
수평 비행 수직 상승 및 하강 비행 시 모두 , 5 ms로 등속비행한다고 가정한다.
Table 1 AR.Drone specifications
IItteemmss VVaalluuee Size 22×22×4 inches
Weight 420 g
Range 50 m
Battery LiPo 3S1P 1500 mAh Motor Brushless (14.5 Watt) Propeller Dia. 9 inches, 2 blades
M
Moovveemmeenntt EEnneerrggyy ppeerr mmeetteerr ((JJ ))
Horizontal 13.19
Vertically upwards 15.62 Vertically downwards 12.75
Table 2 Energy consumption for each AR.Drone movements
한편 격자간 거리가 , 1 m인 그리드맵에서 무인항공 기 비행은 Fig. 3과 같이 고도 변화가 없는 경우 ( 와 ) Fig. 4와 같이 고도 변화가 있는 경우 ( ≠ 로 구분할 수 있다 고도변화가 없는 비행에) . 는 차원 평면상 전진방향 좌우방향 대각방향 비행이 2 , ,
있다. 은 수평비행시 단위미터당 소모 에너지이
다 본 연구에서는 모든 고도변화가 없는 비행에 대하. 여 수평비행시 소모 에너지를 적용하였다 따라서 고. 도변화가 없는 비행은 가지로 볼 수 있다1 .
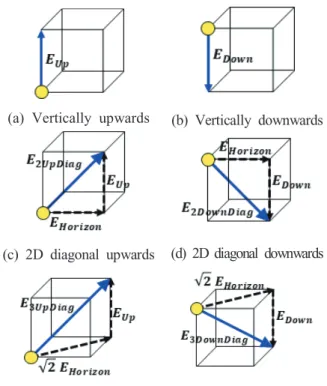
고도변화가 있는 비행에는 수직 상승 및 하강, ,
평면상 차원 대각방향 상승 및 하강2 , 3차원 대각 방향 상승 및 하강 비행이 있다. , , ,
, , 는 각각 수직 상승 및 하 강, 2차원 대각방향 상승 및 하강, 3차원 대각방향 상 승 및 하강시 단위미터당 소모 에너지이다 이 때 차. 2 원 및 차원 대각방향 이동시 소모 에너지는 정확한 3 계산이 어려우므로 벡터합으로 근사화한 값을 사용한 다 따라서 차원 환경에서 쿼드콥터 무인항공기 비행. 3 은 고도 변화가 없는 경우 가지 고도 변화가 있는 1 , 경우 가지의 총 가지로 정의할 수 있다6 7 .
(a) Forward direction
(b) Left and right direction
(c) Diagonal direction
Fig. 3 The type of maneuver and energy estimation on 3D grid map when z
(a) Vertically upwards (b) Vertically downwards
(c) 2D diagonal upwards (d) 2D diagonal downwards
(e) 3D diagonal upwards (f) 3D diagonal downwards Fig. 4 The type of maneuver and energy estimation
on 3D grid map when z ≠
비
비용용함함수수 계계산산 33..22
본 연구에서는 기존 D* Lite 알고리즘을 그대로 사 용하나 비용함수를 쿼드콥터의 소모 에너지로 계산한, 다 비용함수 계산의 기본이 되는 두 노드간 이동비용 .
는 Eq. 8과 같이 두 노드간 거리 와 해당 비행시 단위 미터당 소모 에너지 의 곱으로 계산한다 노드간 비행 판단 및 이동비용 계산 . 의사코드는 Table 3과 같다 에너지 기반 . g-value 및
는 과 같이 계산된다
rhs-value Eq. 9, 10 .
(8)
(9)
[1] dh=(z)-(z);
[2] if (dh==0) c()=d()*; [3] else
[4] dx=(x)-(x);
[5] dy=(y)-(y);
[6] if (dh<0)&&(dx*dy==0);
[7] c()=abs(dh)*;
[8] else if (dh>0)&&(dx*dy==0);
[9] c()=abs(dh)*;
[10] else if (dh<0)&&((dx==0)||(dy==0));
[11] c()=d()*;
[12] else if (dh>0)&&((dx==0)||(dy==0));
[13] c()=d()*; [14] else if (dh<0)&&(dx*dy~=0);
[15] c()=d()*; [16] else if (dh>0)&&(dx*dy~=0);
[17] c()=d()*; Table 3 pseudo code
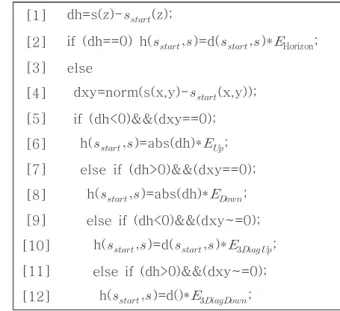
휴리스틱은 어림값으로
, D* Lite 알고리즘에서는 임 의의 노드 에서 출발점으로 이동할 때의 비용을 어림 한다. S. Koenig은 차원 환경에서의 휴리스틱으로 두 2 노드간 좌표상 거리와 좌표상 거리 중 큰 값을 이 용하였다[10]. 본 연구에서 거리를 비용함수로하는 3 차원 D* Lite의 경우 두 노드간 유클리드 거리로 휴리 스틱을 계산한다. 에너지를 비용함수로하는 경우에는 휴리스틱을 두 가지 방법으로 계산하였다.
첫번째 방법은 노드간 이동비용 계산과 동일하게 노
드간 이동을 가지 중 하나로 판단하여 계산한다 이 7 . 경우를 ‘normal heuristic’이라 부르기로 하며 의사코, 드는 Table 3의 이동 비용과 동일하다 두 번째 방법. 은 대각방향 이동시 차원과 차원을 구분하지 않고 2 3 모든 대각방향 이동을 차원으로 가정하고 계산한다3 . 이 경우를 ‘simple heuristic’이라 부르기로 하며 의사, 코드는 Table 4와 같다. Simple heuristic은 무인항공 기 비행을 가지로만 구분하므로 연산과정이 줄어든다5 .
[1] dh=s(z)-(z);
[2] if (dh==0) h()=d()*Horizon; [3] else
[4] dxy=norm(s(x,y)-(x,y));
[5] if (dh<0)&&(dxy==0);
[6] h()=abs(dh)*; [7] else if (dh>0)&&(dxy==0);
[8] h()=abs(dh)*; [9] else if (dh<0)&&(dxy~=0);
[10] h()=d()*; [11] else if (dh>0)&&(dxy~=0);
[12] h()=d()*;
Table 4 Simple heuristic pseudo code
시
시뮬뮬레레이이션션 44..
시뮬레이션을 통해
D* Lite의 비용함수 및 휴리스틱 에 따른 경로 특성을 확인하였다 본 연구에서는 두 . 점 사이의 전역경로만 고려하였으며 시뮬레이션 환경, 은 차원 및 차원 랜덤 그리드맵 산업현장과 유사한 2 3 ,
차원 그리드맵이다
3 .
랜
랜덤덤맵맵에에서서의의 경경로로 생생성성 시시뮬뮬레레이이션션 44..11
차
차원원 랜랜덤덤맵맵 44..11..11 22
시뮬레이션 환경은 격자간 거리가
1 m이고 크기가
100×100 m인 차원 맵으로 장애물은 점 형태로 맵2 , 의 40%를 차지하며 랜덤으로 분포한다 출발점은 . 좌 표 및 좌표의 1~15 m 범위 목표점은 , 좌표 및 좌표의 85~100 m 범위에서 랜덤으로 설정된다. 2차 원 랜덤맵에서 경로는 Fig. 5와 같이 생성된다. 500개 의 랜덤맵에 대하여 거리를 비용함수로 하는 경로와 에너지를 비용함수로 하는 경로를 비교하였다 시뮬레. 이션의 수치적 결과는 Table 5와 같고, 500개의 랜덤 맵에서 수행한 결과의 평균값이다 실행시간 확장 노. , 드수 경로 길이 소모 에너지 값을 통해 두 경로가 사, , 실상 차이가 없다는 것을 확인할 수 있다 이는 차원 . 2 환경에서 에너지를 비용함수로 할 경우 거리를 비용함 수로 할 때와 동일하게 거리에 비례하기 때문이다 즉. ,
과 같이 거리를 비용함수로 하는 경우 비용함수 Fig. 6
최대 편차는 , 에너지를 비용함수로 하는 경 우 최대 편차는 이다 따라서 차원 환. 2 경에서는 비용함수 종류가 경로 생성에 영향을 미치지 않는다고 볼 수 있다.
Fig. 5 Example of path planning on 2D random grid map
C Coosstt ffuunnccttiioonn
E Exxeeccuuttiioonn
ttiimmee((sseecc)) C Ceellll e
exxppaannssiioonnss L Leennggtthh
((mm)) E Enneerrggyy
((JJ))
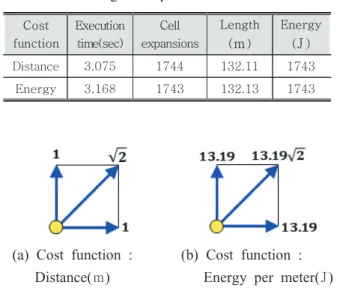
Distance 3.075 1744 132.11 1743
Energy 3.168 1743 132.13 1743
Table 5 Numerical results for path planning on 2D random grid map
(a) Cost function : Distance(m)
(b) Cost function : Energy per meter(J) Fig. 6 Edge cost variation for each case in 2D
차
차원원 랜랜덤덤맵맵 44..11..22 33
시뮬레이션 환경은 격자간 거리가
1 m이고 크기가
50×50×20 m인 차원 맵이며 장애물이 점 형태로 3 , 맵의 40%를 차지하며 랜덤으로 분포한다. 출발점은
, , 좌표가 1~10 m 범위 목표점은 , 좌표 및 좌
표가 40~50 m 범위, 좌표가 15~20 m 범위에서 랜 덤으로 설정된다. 500개의 랜덤맵에 대하여 거리를 비 용함수로 하는 경로, 에너지를 비용함수로하면서
을 채택한 경로 을
normal heuristic , simple heuristic 채택한 경로의 세 가지 경로를 비교하였다 시뮬레이. 션의 수치적 결과는 Table 6과 같고, 500개의 랜덤맵 에서 수행한 결과의 평균값이다.
거리를 비용함수로 한 경로와 에너지를 비용함수로
한 경로의 최대 길이차는 약 2.71 m이고 최대 에너지, 차는 36.98 J 로 수평이동 기준 약 2.8 m 이동시 소모 에너지이다 따라서 두 경로간 차이가 거의 없다고 볼 . 수 있다 그러나 연산시간과 확장 노드수를 통해 에너. 지를 비용함수로 할 경우 월등히 효율적임을 확인할 수 있다 에너지를 비용함수로한 경우 연산시간은 거리를 . 비용함수로한 경우의 약 1/10 수준이고 확장 노드수는 , 최대 1900개 이상 감축되었다 즉 에너지를 비용함수. , 로 할 경우 거리를 비용함수로한 최단경로와 흡사한 경 로를 더 빠르게 생성한다 이는 차원 환경에서 . 3 Fig. 7 과 같이 비용함수에 따라 경로비용의 종류 및 비용함수 편차가 상대적으로 증가하기 때문이다[3, 10]. 거리기 반 비용함수의 경우 경로비용의 종류는 세 가지이고, 최대편차가 약 0.73(m 으로 최대 이동비용) ( 의 ) 이다 반면 에너지 기반 비용함수의 경우 경로비 42.1% . ,
용의 종류는 가지이고 최대편차는 약 8 , 11.58(J), 최대 이동비용(24.33)의 47.6%이다.
한편 을 적용한 경우
simple heuristic normal 을 적용했을 때 보다 연산시간이 약 배 빨
heuristic 2
랐고 확장 노드수는 약 , 200개 감축되었다 경로 길이. 와 소모 에너지 역시 simple heuristic을 적용한 경우 감축되었다.
C Coosstt ffuunnccttiioonn
E
Exxeeccuuttiioonn ttiimmee((sseecc))
C Ceellll e exxppaannssiioonnss
L Leennggtthh
((mm)) E Enneerrggyy
((JJ)) Distance 17.693 2458 61.984 834.157
Energy (normal heuristic)
1.8539 717 64.694 871.137
Energy (simple heuristic)
0.925 516 63.164 849.826
Table 6 Numerical results for path planning on 3D random grid map
(a) Cost function : Distance(m)
(b) Cost function : Energy per meter(J) Fig. 7 Edge cost variation for each case in 3D
산
산업업현현장장과과 유유사사한한 차차원원 맵맵
44..22 33
시뮬레이션 환경은 격자간 거리가
1 m이고 크기가
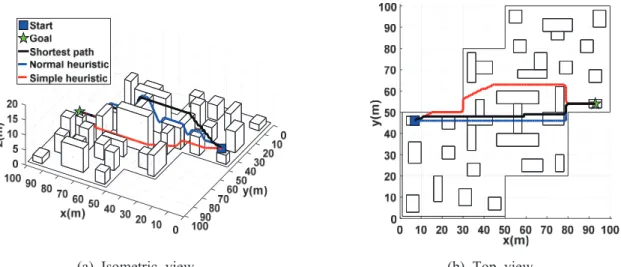
100×100×20 m인 차원 그리드맵이고 모든 장애물3 , 을 직육면체로 가정하였다 시뮬레이션은 출발점과 목. 표점을 각각 다르게한 세 가지 경우에 대하여 수행하 였다 각 경우에 대한 시뮬레이션 결과 . Fig. 8, 9, 10 과 같이 경로가 생성되었고 수치적 결과는 , Table 7과 같다. Case 3을 제외하고는 거리를 비용함수로한 경 로가 가장 짧은 경로를 가지며 최소 에너지를 요구한 다 최대 경로차는 . Case 2에서 약 5.85 m로 거리를 , 비용함수로한 최단경로와 흡사하다고 볼 수 있다 그. 러나 연산시간과 확장 노드수는 모든 경우에 대하여 에너지를 비용함수로 했을 때 월등히 효율적이었다.
특히 Case 1에서는 경로길이차가 약 2.44 m에 불과
하나 연산시간은 최대 19.3 , 배 노드확장수는 최대 6.5 배 차이가 났다.
한편 에너지를 비용함수로 할 때 모든 경우에서
을 적용한 결과가 유리하게 나타났다
simple heuristic .
에서는 휴리스틱에 관계없이 동일한 경로를 생 Case 1
성했으나 simple heuristic을 적용했을 때 약 10초의 시간이 감축되었다. Case 2에서는 simple heuristic을 채택한 경로가 거리를 비용함수로한 경로보다 2.63 m 가량 길었으나 연산시간이 약 배 빨랐다 특히 2 . Case
에서는 을 적용한 경로가 거리를 비
3 simple heuristic
용함수로한 최단경로보다 0.56 m 가량 짧은 경로를 약 2.3배 빠르게 도출하였다. 반면 normal heuristic을 적용한 경로는 거리를 비용함수로한 경로보다 약 1.8 m 긴 경로를 생성하는데 2.5배의 시간이 더 소요되었다.
결 결 론론 55..
본 논문에서는 D* Lite 알고리즘의 비용함수를 쿼드 콥터 무인항공기의 비행에 따른 소모 에너지로 계산하 여 에너지 기반 경로계획을 수행하였다. 2차원 환경의 경우 소모 에너지가 거리에 비례하므로 비용함수에 따 른 경로차이가 없다 그러나 차원 환경의 경우 무인항. 3 공기의 비행을 가지로 구분할 수 있고 고도 변화가 7 , 없는 비행에서 전진방향 이동과 대각방향 이동을 구분 하면 총 가지 종류의 경로비용이 발생한다 따라서 에8 . 너지를 비용함수로 할 경우 경로비용의 종류 및 비용 함수 편차가 증가하여 경로 수렴시간 및 확장 노드수
C
Coosstt ffuunnccttiioonn EExxeeccuuttiioonn ttiimmee((sseecc)) CCeellll eexxppaannssiioonnss LLeennggtthh((mm)) EEnneerrggyy((JJ )) C
a s e 1
Distance 844.26 14857 136.71 1807.7
Energy
(normal heuristic) 54.573 2751 139.14 1840.4
Energy
(simple heuristic) 43.809 2272 139.14 1840.4
C as e 2
Distance 409.83 9197 100.58 1339.1
Energy
(normal heuristic) 131.32 4474 106.43 1425.9
Energy
(simple heuristic) 67.809 2522 103.80 1369.1
C a s e 3
Distance 64.933 2487 94.071 1240.8
Energy
(normal heuristic) 162.37 4937 95.874 1269.1
Energy
(simple heuristic) 28.753 42 93.485 1233.1
Table 7 Numerical results for path planning on 3D cluttered map
(a) Isometric view (b) Top view Fig. 8 Graphical results for path planning on 3D cluttered map (Case 1)
(a) Isometric view (b) Top view
Fig. 9 Graphical results for path planning on 3D cluttered map (Case 2)
(a) Isometric view (b) Top view
Fig. 10 Graphical results for path planning on 3D cluttered map (Case 3)
가 확연히 줄어드는 경향을 보인다[4, 11]. 특히 을 채택한 경우 노드확장 과정에서 simple heuristic
계산이 단순화되어 경로 생성 효율이 개선되는 경향을 보였다. 그러나 경우에 따라 다른 결과를 보이기도 하 는데 이것은 노드확장시 주변의 장애물 배치가 비용함, 수 계산에 영향을 미쳐 노드 확장 방향이 달라질 수 있기 때문이다 또한 에너지 기반 경로계획시 국부적으. 로 적은 에너지를 소모하는 노드를 선택함으로써 전체 경로길이가 증가하여 결과적으로 최단경로보다 많은 에너지를 요구하는 경로가 도출되기도 한다 따라서 항. 상 에너지 최소화를 보장하기 위해 노드간 거리와 이 동시 소모 에너지를 모두 비용함수로 고려하여야 한다.
이는 거리와 에너지의 단위 차로 인한 정규화 과정이 요구되며 향후 정규화 문제 해결을 통해 항상 최소 에, 너지가 보장되는 경로계획 연구를 수행할 계획이다.
후 후 기기
이 논문은 년도 정부 산업통상자원부 의 재원으
2017 ( )
로 한국산업기술진흥원의 지원을 받아 수행된 연구입니 다(N0002431, 2017년 산업전문인력역량강화사업).
RReeffeerreenncceess
[1] H.-Y. Ko, J.-H. Baek, and H.-S. Choi, “Autonomous Flight System of UAV through Global and Local Path Generation,” Journal of Aerospace System [2] N. Ganganath, C. Cheng and C. K. Tse, "A
Constraint-Aware Heuristic Path Planner for Finding Energy-Efficient Paths on Uneven Terrains," Journal of IEEE Transsactions on Industrial Informatics, Vol. 11, No. 3, 2015, pp.601 611.~
[3] S. Dogru and L. Marques, "Energy Efficient Coverage Path Planning for Autonomous Mobile Robots on 3D Terrain," Proceeding of 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, 2015, pp. 118-123.
[4] S. Liu and D. Sun, "Minimizing Energy Consumption of Wheeled Mobile Robots via Optimal Motion Planning," Journal of IEEE/ASME Transactions on
Mechatronics, Vol. 19, No. 2, 2014, pp. 401-411.
[5] C. D. Franco and G. Buttazzo, "Energy-Aware Coverage Path Planning of UAVs," Proceeding of 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, 2015, pp. 111-117.
[6] S. Ahmed, A. Mohamed, K. Harras, M. Kholief and S. Mesbah, "Energy efficient path planning techniques for UAV-based systems with space discretization,"
Proceeding of 2016 IEEE Wireless Communications and Networking Conference, 2016, pp. 1-6.
[7] L. Ding, D. Zhao, H. Ma, H. Wang and L. Liu,
"Energy-Efficient Min-Max Planning of Heterogeneous Tasks with Multiple UAVs," Proceeding of 2018 IEEE 24th International Conference on Parallel and Distributed Systems (ICPADS), 2018, pp. 339-346.
[8] K. Zhu, X. Xu and S. Han, "Energy-Efficient UAV Trajectory Planning for Data Collection and Computation in mMTC Networks," Proceeding of 2018 IEEE Globecom Workshops (GC Wkshps), 2018, pp. 1-6.
[9] M. B. Ghorbel, D. Rodríguez-Duarte, H. Ghazzai, M.
J. Hossain and H. Menouar, "Joint Position and Travel Path Optimization for Energy Efficient Wireless Data Gathering Using Unmanned Aerial Vehicles," Journal of IEEE Transactions on Vehicular Technology, Vol. 68, No. 3, 2019, pp.
2165-2175.
[10]M. Monwar, O. Semiari and W. Saad, "Optimized Path Planning for Inspection by Unmanned Aerial Vehicles Swarm with Energy Constraints," Proceeding of 2018 IEEE Global Communications Conference (GLOBECOM), 2018, pp. 1-6.
[11]S. Koenig and M. Likhachev, "Fast replanning for navigation in unknown terrain," Journal of in IEEE Transactions on Robotics, Vol. 21, No. 3, 2005, pp.
354-363.