서론 I.
( ) .
/
.
.
.
. FTD
(False Track Discrimination) . FTD ,
(track initiation) .
* (Corresponding Author)
: 2010. 1. 18., : 2010. 8. 10., : 2010. 8. 20.
, :
([email protected]/[email protected])
( UD100002KD).
.
, perceivable target PDA [10]
,
IPDA [5] . HPDA [6,7],
[8]
.
.
ML-PDA, EM-ML ML-PDA
EM-ML
,
[9,11]
PMHT (Probabilistic Multi-Hypothesis
Tracker) [1-4] Streit Luginbuhl .
PMHT ,
/ .
.
PMHT
A Study on Automatic Target Detection and Tracking Algorithm with the PMHT in a Cluttered Environment
, *
(Hae-Ho Lee1 and Taek-Lyul Song1)
1Hanyang University
Abstract: A fundamental characteristic of PMHT (Probabilistic Multi-Hypothesis Tracker) is that the number of targets and initial states of targets in the surveillance area must be a priori known. This requirement is impossible to fulfil in almost every realistic scenario. In the paper, we present two track initiation methods to solve the problem. The proposed track initiation methods are 2-point track initiation and Hough transform track initiation, and they are used to evaluate track initial states and weights for FTD (False Track Discrimination) of the PMHT algorithm. Also suggested as automatic target detection for tracking systems that combines track initiation for target detection with the PMHT algorithm for target tracking in a cluttered environment. A series of Monte-Carlo simulation runs is employed to evaluate the overall system performance with the two track initiation methods and the results are compared and analyzed.
Keywords: PMHT (Probabilistic Multi-Hypothesis Tracker), 2-point track initiation, hough transform track initiation, FTD (False Track Discrimination), track management, track merging
Copyright© ICROS 2010
[15,16]
, 2-point
ROI (Region of Interest) . 2-point
(hough transform)
, FTD PMHT
. PMHT
, 2
. . II
PMHT , III
. IV
, V
.
II. PMHT
, PMHT .
iteration sliding window PMHT
. 시스템 모델링
1.
. PMHT (1)
(2)
. (3) ,
. (1)
,
.
∼ × × (1)
(2)
∼∼
(3) ,
. 2. PMHT
PMHT [1-4]
, EM
soft a posteriori probability association
[9,11]
. PMHT sliding window EM
(synthetic measurement) (synthetic covariance)
. 1
, PMHT
. PMHT
, ,
.
Markov Switching Process
. PMHT
.
(4) sliding window
, ,
, ,
.
‘0’ ‘1’
.
. 0
(priori density)
.
. EM
.
(5) iteration
(4) (6)
.
(6) iteration (7)
.
(7)
(7)
.
(8)
. ,
(8) .
,
, fixed-interval .
(9)~(12) . 2.1 Kalman Filter
Prediction Step
(9) Update Step
(10)
2.2 Fixed-Interval Kalman Smoother Backward Sweeping
(11) Smoothing Gain
(12)
PMHT iteration
,
. 초기화 3. PMHT iteration
PMHT
. ,
.
(13)
iteration
likelihood iteration
.
(14)
PMHT
iteration
, sliding window
. 트랙 초기화 기법 III.
II Streit Luginbuhl
PMHT , tracker
/
.
. tracker
.
(FTD) .
PMHT maximum likelihood
, local maxima
PMHT
. 2
2-point , FTD
. 초기치 선정
1.
트랙 초기화 기법 1.1 2-point
2
/ .
2-point
.
,
× .
,
,
. sliding window
.
. PMHT
.
.
, .
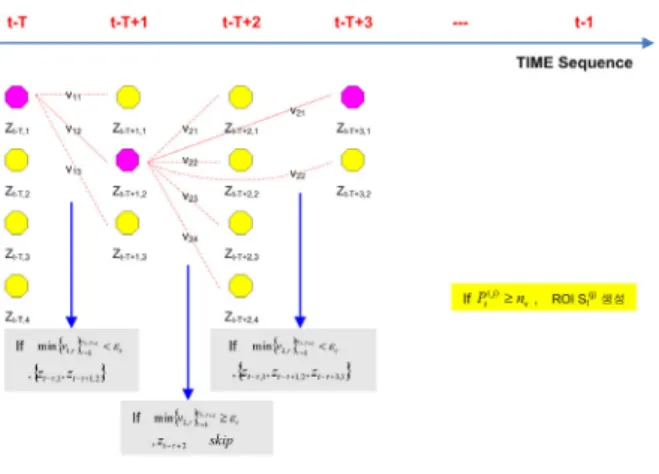
허프 변환 트랙 초기화 기법 1.2
2-point
ROI .
.
PMHT [15,16].
[8]
.
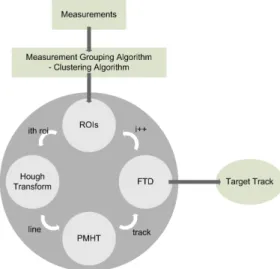
, Measurements Grouping
Algorithm , [8]
.
ROI
.
ROI ,
ROI
,
PMHT . 2
PMHT
. 클러스터링 알고리듬 1.2.1
sliding window
, ,
. ROI ROI
. ROI
(hough transform)
, PMHT
. ROI
. [8]
,
2-point .
.
ROI ROI ROI
ROI
.
. 3
. 허프 변환 1.2.2
ROI ROI
.
,
PMHT . . [12-14] 1962 Paul Hough
.
,
.
.
.
, - .
(15)
, - .
,
.
.
(accumulator cell)
, ,
. -
.
,
.
.
-
.
(16)
. (16)
,
. ≤ ≤
,
.
, (16)
.
. ≤ ≤
0
.
(accumulator table)
(accumulator cell) ,
.
0
. 4
.
4 1, 2, 3
. 4 1,
2, 3 ,
1, 2, 3
. 직선에서의 초기치 선정 1.2.3
, PMHT
.
ROI
. ROI
, 2 ,
.
1. 2-point .
Fig. 1. 2-point track initiation.
2. .
Fig. 2. Hough transform track initiation.
(sampling time)
ROI
. PMHT
. 가중치 합을 이용한
2. FTD
FTD
M of N , M of N
PMHT .
, N
M . M of N
. PMHT
. PMHT EM
, (17)
.
≥ ⇒
⇒
(17)
,
.
,
.
1 .
,
. sliding window
M of N
,
.
를 이용한 자동 표적 탐지 및 추적 알고리듬 IV. PMHT
2
. PMHT
(track management)
(track merging)
. 5
.
,
PMHT .
FTD
, PMHT FTD
. 트랙 관리
1.
3. .
Fig. 3. Clustering algorithm.
(a) (d)
4. .
Fig. 4. Hough transform in the plane.
.
,
. III
2
. /
/ .
, 5
Tracks FTD Confirmed Tracks FTD 1 .
트랙 합병 2.
.
. ,
. 1
, .
(18)
.
.
determinant
, .
시뮬레이션 V.
,
.
2 4
.
.
PMHT iteration
. ROI
2-point
.
RMSE ,
. 시뮬레이션 조건 1.
, .
. 6 ,
.
( / )
.
,
5. .
Fig. 5. Automatic target detection and tracking system.
1. .
Table 1. Track management.
Tracks FTD Confirmed Tracks FTD if(
≥ )track confirm;
else if(
)track delete;
else
track retain;
if(
)track delete;
else
track retain;
6. .
Fig. 6. Targets's trajectory and number scenario.
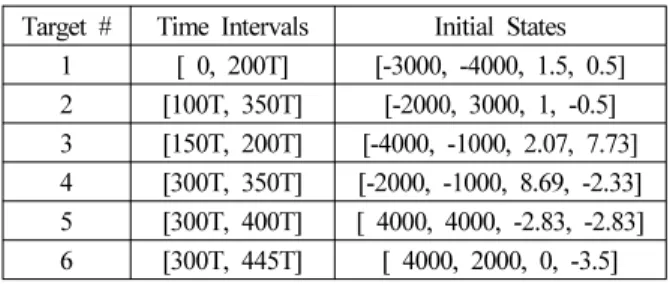
. 6
6 ,
(1.12~9m/sec) , 2
1~2m/sec , 2
3.5, 4m/sec ,
2
(8, 9m/sec) .
6
. 2
, , /
.
/ monostatic ,
,
50m, 1° .
3 , FTD
.
0.8
.
, 7
.
,
PMHT sliding window shifting
.
2
. (case 1)
, (case 2)
.
. 시뮬레이션 결과
2.
7 8 2-point,
1 2
.
,
, 1
, 2
. 8
.
9 1 3
.
, ROI
, ,
. 1
, 3
2. / / .
Table 2. Initial states of the targets and times at which they appear and disappear.
Target # Time Intervals Initial States 1 [ 0, 200T] [-3000, -4000, 1.5, 0.5]
2 [100T, 350T] [-2000, 3000, 1, -0.5]
3 [150T, 200T] [-4000, -1000, 2.07, 7.73]
4 [300T, 350T] [-2000, -1000, 8.69, -2.33]
5 [300T, 400T] [ 4000, 4000, -2.83, -2.83]
6 [300T, 445T] [ 4000, 2000, 0, -3.5]
3. / .
Table 3. Parameters for track initiation/management.
2-point
30 m/sec 30 m/sec
5
0.8
7
4
4. .
Table 4. Parameters for system.
() 0.9 0.6
() 10 50
Sliding window size () 15
Shifting size 10
Sampling time () 10 sec 4450 sec
100
7. 1 .
Fig. 7. Comparison of the confirmed tracks in a case 1.
. 7~9
,
4 .
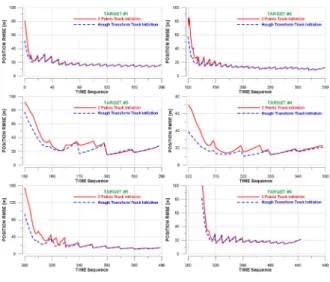
10 11
2-point,
1 2
. ,
,
. 10
, 11
. 2-point
.
.
.
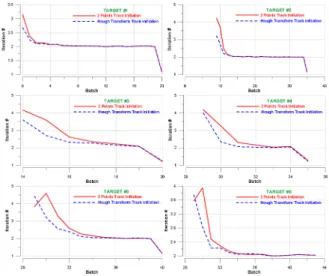
PMHT iteration ,
. 12
iteration 2-point,
.
iteration ,
2-point iteration . 2-point
. 13
RMSE . 12 iteration
PMHT
RMSE ,
2-point
8. 2 .
Fig. 8. Comparison of the confirmed tracks in a case 2.
9. .
Fig. 9. The selected initial track in hough transform.
10. 1 .
Fig. 10. Comparison of the estimated number of targets in a case 1.
11. 2 .
Fig. 11. Comparison of the estimated number of targets in a case 2.
12. PMHT iteration .
Fig. 12. Comparison of the PMHT iteration number.
, / .
.
. 5
4450sec 2
.
,
. 4
2-point
, RMSE ,
. 결론
VI.
PMHT
. PMHT
2-point
,
.
, PMHT iteration , RMSE,
, PMHT
.
.
. PMHT
,
.
참고문헌
[1] R. L. Streit and T. E. Luginbuhl, “Probabilistic multi-hy- pothesis tracking,” Submitted to IEEE Transactions on Automatic Control, Feb. 1995.
[2] R. L. Streit and T. E. Luginbuhl, “Maximum likelihood method for probabilistic multi-hypothesis tracking,” Proc.
of the SPIE International Symposium on Signal and Data Processing of Small Targets, vol. 2335, pp.
394-405, Apr. 1994.
[3] P. Willett, Y. Ruan, and R. L. Streit, “PMHT: problems and some solutions,” IEEE Transactions on Aerospace and Electronic Systems, vol. 38, no. 3, pp. 738-754, Jul. 2002.
[4] P. Willett, Y. Ruan, and R. L. Streit, “The PMHT for maneuvering targets,” Proc. of American Control Conference, Philadelphia, USA, vol. 4, pp. 2432-2433, Jun. 1998.
[5] D. Musicki, R. Evans, and S. Stankovic, “Integrated probabilistic data association (IPDA),” Proc. of the 31st Conference on Decision and Control, Tucson, USA, vol.
4, pp. 3796-3798, Dec. 1992.
[6] T. L. Song and D. S. Kim, “Highest probability data as- sociation for active sonar tracking,” Proc. of the 9th International Conference on Information Fusion, Florence, Italy, pp. 1-8, Jul. 2006.
[7] D. S. Kim and T. L. Song, “A study of automatic Multi-target detection and tracking algorithm using high- est probability data association in a cluttered environ- ment,” Trans. KIEE, vol. 56, no. 10, pp. 1826- 1835, Oct. 2007.
[8] W. Ng, J. Li, S. Godsill, and J. Vermaak, “A hybrid approach for online joint detection and tracking for mul- tiple targets,” Proc. of IEEE Aerospace Conferences
13. RMSE .
Fig. 13. Comparison of the position RMSE.
5. .
Table 5. Comparison of the average simulation time.
(case 1) (case 2)
2-point 33.104960 137.412070
38.825020 86.172860
2005, pp. 2126-2141, Mar. 2005.
[9] R. G. Brown and P. Y. C. Hwang, Introduction to Random Signals and Applied Kalman Filtering, 3rd Ed., JOHN WILEY & SONS, 1997.
[10] Y. Bar-Shaldom and X. Rong Li, Multitarget - Multisensor tracking : Principles and Techniques, Storrs, CT: YBS Publishing, 1995.
[11] Y. Bar-Shalom, X. Rong Li, and Kirubarajan, Estimation with Applications to Tracking and Navigation, Wiley, New York, 2001.
[12] P. V. C. Hough, “Machine Analysis of Bubble Chamber Pictures,” Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959.
[13] R. O. Duda and P. E. Hart, “Use of the hough trans- formation to detect lines and curves in pictures,” Comm.
ACM, vol. 15, pp. 11-15, Jan. 1972.
[14] R. C. Gonzalez, R. E. Woods, and S. L. Eddins., Digital Image Processing, Prentice Hall, 2004.
[15] E. Semerdfiev, K. Alexiev and L. Bojilov, “Multiple sensor data association algorithm using hough transform for track initiation,” Proc. of the First International Conference on Multisource- Multisensor Information Fusion-FUSION'98, vol. 2, pp. 980-985, 1998.
[16] Alexiev K. M., “Multiple target tracking using hough transform PMHT algorithm,” Intelliqent Systems 2002 Proceedings., vol. 1, pp. 227-232, 2002.
이 해 호
2007 .
2009
( ). 2009 ~
. ,
, .
송 택 렬
1974 . 1981 Univ.
of Texas at Austin
( ). 1983 Univ. of Texas at Austin
( ). 1974 ~1995 . 1995 ~
. ,
, .