http://dx.doi.org/10.7734/COSEIK.2013.26.5.359 Engineering Institute of Korea
사고로 지면으로 추락낙하 충돌하는 고준위폐기물 처분용기에 대한 기구동역학 해석: 이론
권 영 주1†
1홍익대학교 기계정보공학과
Rigid Body Dynamic Analysis on the Spent Nuclear Fuel Disposal Canister under Accidental Drop and Impact to the Ground: Theory
Young-Joo Kwon1†
1Department of Mechanical & Design Engineering, Hongik University, Sejong, 339-701, Korea
Abstract
This paper is the first paper among two papers which constitute the paper about the rigid body dynamic analysis on the spent nuclear disposal canister under accidental drop and impact on to the ground. This paper performed the general theoretical study on the rigid body dynamic analysis. Through this study the impulsive force which is occurring in the spent nuclear fuel disposal canister under accidental drop and impact to the ground and required for the structural safety design of the canister is intended to be theoretically formulated. The main content of the theoretical study is about the equation of motion in the multibody dynamics. On the basis of this study the impulsive force which is occurring in the multibody in the case of collision between multibody is theoretically formulated. The application of this theoretically formulated impulsive force to computing the impulsive force occurring in the spent nuclear fuel disposal canister under accidental drop and impact to the ground is investigated.
Keywords : spent nuclear fuel disposal canister, rigidbody dynamic analysis, multibody dynamics, equation of motion, collision between multibody, impulsive force
†Corresponding author:
Tel: +82-44-860-2484; E-mail: [email protected] Received June 28 2013; Revised September 12 2013;
Accepted October 7 2013
Ⓒ 2013 by Computational Structural Engineering Institute of Korea
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.
org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. 서 론
사용 후 핵연료와 같은 고준위폐기물의 관리를 위하여 가 장 가능하고 안전한 해결방법으로 현재 고려되고 있는 기술 은 심지층 처분기술(Choi et al., 2008; Kwon, 2010;
Zhou et al., 2010)이다. 심지층 처분기술의 핵심기술 중하 나인 사용 후 핵연료 처분용기가 한국원자력연구원이 중심이 되어 개발되었다(Lee et al., 2007; Kwon, 2010). 그러나 개발 설계된 처분용기가 실제 처분장에서 처분 시 운송차량 에서의 추락낙하 같은 사고에 의해 지면과 충돌하는 경우 처 분용기에 발생하는 충격력에도 견딜 수 있는지는 여전히 의 문이다. 국제원자력기구(IAEA)의 규정(IAEA, 1985)에 의 하면 고준위폐기물과 같은 방사성물질을 담고 있는 처분용기
는 지상 9m(30ft) 높이에서 추락낙하 하여 가장 약한 부분 이 지면에 충돌하여도 안전하게 설계되어야 한다. 이를 위해 서는 처분용기 모델을 설계 시험제작하여 실험을 수행해야 하지만 안전성과 비용적인 측면에서 바람직하지 않다. 그 대 신 개념설계 단계에서 처분용기의 추락낙하 충돌반응에 대한 동적해석을 수행하여 처분용기 추락낙하 시 지면과의 충돌에 의한 처분용기 파손 가능성을 방지할 수 있도록 충분한 충격 강도를 확보하는 것이 바람직하다. 이런 경우 처분용기 설계 자의 주된 관심은 추락낙하 충돌 충격 시 처분용기에 가해지 는 총 충격력의 크기가 얼마인가이다. 처분용기의 추락낙하 충돌 충격에 대한 동적해석의 근본적인 목적은 이와 같은 충 격력에도 처분용기가 파괴되지 않고 내부 방사성물질이 누출 되지 않도록 처분용기가 충분한 강도를 갖도록 하는 것이다.
따라서 처분용기 내부를 포함한 모든 구성부분들이 추락낙하 충돌 충격 시 처분용기에 가해지는 충격력을 충분히 견딜 수 있도록 처분용기가 설계되어야 한다. 이를 위해서는 추락낙 하 충돌 시 처분용기에 가해지는 충격력을 정확하게 계산하 여야 한다. 이와 같은 방사성물질 처분용기의 추락낙하 시 발생하는 충격력 계산이 Teper 등(1989)에 의해 수행된 적 이 있다. 그러나 Teper 등이 충격력을 계산한 처분용기는 매우 제한된 특별한 구조형상이었다. 따라서 그들의 계산 결 과는 다른 구조형상의 처분용기에는 적용할 수가 없다. 또한 그들은 처분용기가 추락낙하 시 충돌에 의하여 충돌 부위에 많은 소성변형이 발생한다는 가정에 의하여 충격력을 계산하 여 실제 충돌에 의한 충격력보다는 더 큰 정적 충격력을 계 산하였다고 사료된다. 더구나 그들은 충격력을 계산할 때 지 면으로부터 처분용기의 추락낙하 높이를 전혀 고려하지 않음 으로 해서 그들의 계산은 추락낙하 높이에 따른 충격력의 변 화를 전혀 예측하지 못하고 있다. 이는 실제 상황과는 매우 거리가 있는 계산이라고 사료된다. 최근의 연구(Kwon, 2011)에 의하면 이와 같은 매우 큰 정적 충격력이 처분용기 에 가해지는 경우 처분용기는 파괴 되어 그 내부의 사용 후 핵연료가 노출될 정도의 큰 소성변형이 발생하여 처분용기가 사고에 의한 추락낙하 시에는 구조 안전성에 문제가 있음을 알 수 있다. 그러나 이는 실제 상황과는 거리가 있는 해석결 과라고 사료된다. 실제 처분용기 구조는 단순 실린더 구조형 상이 아니고 복잡한 구조형상(Salo et al., 1990)을 가지고 있을 뿐 아니라 처분용기가 처분장에서 사고로 추락낙하하여 지면과 충돌하는 반응은 매우 동적이며 또한 처분용기 자체 이외에 운반차량의 영향도 받기 때문에 그 반응은 다물체 동 역학문제(Shabana, 1985)라고 사료된다. 이는 복합 다물체 구조물에서 접촉부분이나 이음매(조인트) 등에서 발생하는 동적하중(Kwon et al., 1999; Ku et al., 2012a; 2012b) 을 구하는 개념 및 방법과 동일하다. 따라서 처분용기의 추 락낙하 시 지면과의 충돌에 의하여 처분용기에 가해지는 충격 력을 정확하게 구하기 위해서는 임의구조형상의 처분용기 추 락낙하 반응에 대한 매우 일반적인 다물체 기구동역학 해석방 법이 요구된다고 사료된다. 이를 위하여 본 논문에서는 매우 일반적인 다물체 기구동역학이론이 사고로 추락낙하 하는 처 분용기의 지면과의 충돌 충격현상을 이해하기 위하여 연구되 었다. 더 나아가 이를 이용하여 지면과의 충돌 시 처분용기에 가해지는 충격력을 이론적으로 구하는 문제를 검토하였다.
2. 다물체 기구동역학 이론
2.1 기저행렬, 방향여현행렬, 좌표행렬과 회전행렬
본 절에서는 다물체 기구동역학 이론에서 매우 중요한 몇 개 의 수학적 행렬을 정의 한다. 먼저 기저행렬(base matrix) , 즉 를 다음과 같이 정의한다.
, ∙ (1) 여기서, 1,2,3는 직각좌표계에서 각 방향으로의 서로 수직인 단위기저벡터(unit base vector)이며, 상첨자 는 ( 1)개의 물체로 구성된 다물체계에서 물체 를 의미한 다. 기저행렬 , 즉
는 물체 에 부착된 기저행렬을 의미 한다. 보통 다물체계에는 기준물체(ground 혹은 reference body)가 있는데, 이 기준물체에 부착된 기저행렬을 상첨자 없이 로 표시한다. 이 기저행렬
를 이용하면 임의의 벡터 를 다음과 같이 표현할 수 있다.
(2)
여기서,
는 다음과 같이 정의된 좌표행렬(coordinate matrix) 이다.
(3)
1,2,3는 기저행렬
에 대한
의 기저벡터 방 향 직각좌표이다. 보통 기저행렬
는 다음과 같이 다른 기 저행렬 으로 표시될 수 있다.
[
],
=
· (4)
는 방향여현행렬(direction cosine matrix)이라 하고 식 (4)를 기저행렬의 변환법칙(transformation rule)이라 한다. 2차 등급 텐서 의 좌표행렬
의 변환법칙은 식 (4) 와 약간 다른데 다음과 같이 정의될 수 있다.
(5)
마지막으로 다음과 같은 회전행렬(rotation matrix)를 정 의한다.
(6)
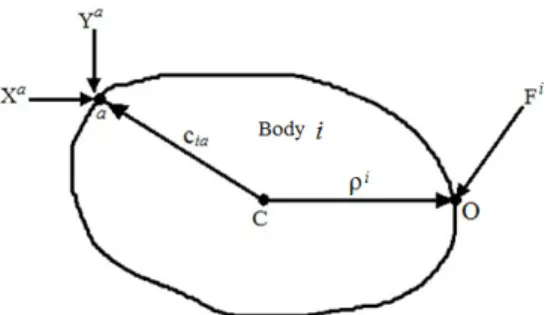
Fig. 1 Position vector of a mass dm on a rigid body and bases. C: mass center
2.2 강체 운동학이론
한 물체의 각속도 는 Fig. 1에 표시된 바와 같이 공간에 고정된 기저행렬
에 대한 물체에 고정 부착된 기저행렬
의 관점에서 측정된 물체의 회전률로 정의된다. 강체가 회전 할 때 회전각도()는 오일러각(Euler angles)이나 브라이 언각(Bryan angles)과 같은 여러 방법으로 표시될 수 있다.
따라서 각속도 도 측정되는 회전각도에 따라 여러 방법으로 표현될 수 있다. 물체에 고정부착된 기저행렬
관점에서 는 다음과 같이 표시된다.
++
(7)
식 (4)와 (6)을 이용하면 다음과 같은 식을 유도할 수 있다.
× (8)
식 (8)을 이용하면 임의 벡터 ++에 대 하여 다음 식을 얻는다.
× (9)
Fig. 1에서
은 임의의 관성기저(inertial base)행렬이 며 이 기저행렬에 대하여 다물체계가 움직이고 있다. 다른 기저행렬
가 다물체계의 물체 중 하나인 물체 에 고정부 착 된 중심 인 기저행렬이라 하자. 점 는 물체 위에서 움직이는 점이다. Fig. 1에 표시된 부호들을 이용하여 점 의 위치 을 다음과 같이 표시할 수 있다.
′ ′ (10)
여기서,
,
이다. 식 (9)를 이용하면 물체 의 질량중심 가 점 와 일치하고 물체 가 강체면 다음과 같이 점 P의 위치, 속도, 가속도식을 얻는다.
× × × ×
(11)
2.3 단일물체에 대한 가상일률의 원리 및 운동방정식
일반적으로 운동방정식을 유도할 때에는 보통 가상일의 원
리를 이용하여 유도되어 왔다(Wittenburg, 1977; Shabana, 1989; Bae et al., 1987a; 1987b). 그러나 가상일의 원리 를 이용하는 경우 다물체 사이의 가상일이 영(zero)이 아니기 때문에 이를 추가적으로 고려해야 하고 또한 구속조건을 갖는 계에 대해서는 라그란지 승수 λ를 또한 포함해야 하기 때문에 운동방정식 유도에 어려움이 많다. 따라서 본 논문에서는 이 와 같은 번거로움이 없는 가상 일률의 원리(Pars, 1979;
Wittenburg, 2007)를 이용 하여 다물체계의 운동을 지배하 는 운동방정식을 유도하기로 한다. 비록 다물체계에서 다물체 사이의 변위에 의한 가상일은 존재하지만 가상일률은 0(zero) 이 된다. 왜냐하면 다물체 사이의 변위는 일정하고 그 변화율 은 0(zero)이기 때문이다(Wittenburg, 2007). 따라서 단일 물체에 대한 다음과 같은 가상일률의 원리 식을 얻는다.
∙ (12)역시 식 (11)를 이용하면 식 (12)는 다음과 같이 표현될 수 있다.
× ∙
(13)식 (13)을 전개하여 정리하면 다음과 같은 단일물체에 대 한 가상일률의 원리(principle of virtual power) 식을 얻 을 수 있다.
∙ ∙
×∙ × ∙ (14)
여기서, 는 물체에 고정 부착된 기저행렬
의 중심 에
대한 물체의 관성텐서(inertia tensor)이며 다음 식으로 정 의된다.
∙ 항등텐서 (15)만일 강체가 구속되어 있지 않으면 가상속도와 가상각속도 는 서로 무관하기 때문에 식 (14)로부터 뉴튼의 운동방정식 과 회전에 대한 오일러의 방정식을 얻는다. 만약에 점 A가 물체의 질량중심 C와 일치하면 식 (14)는 다음과 같이 된다.
∙ ∙∙ × ∙
(16)
2.4 다물체계의 운동방정식
다물체계에 대한 운동방정식은 다물체계를 구성하고 있는 개별 물체에 뉴튼의 운동방정식 및 오일러의 운동방정식을 각각 적용하여 이들을 종합함으로써도 얻을 수 있다. 그러나 이 방법은 구성하는 물체의 수가 많거나 컴퓨터를 이용한 전 산계산을 수행할 때 문제가 있다. 따라서 이러한 문제를 극 복하기 위한 다물체계에 대한 운동방정식을 유도할 필요가 있는데 이에는 가상일의 원리를 이용하여 유도하는 방정식 (Wittemburg, 1977), 재귀적방법(recursive method)을 이용하여 유도하는 방정식(Bae et al., 1987a; 1987b;
Ku et al., 2012b) 등이 있다. 이들 방정식들도 여전히 라 그란즈 승수()를 식에 포함하고 있는 불편함이 있다. 그러 나 본 논문에서는 이러한 불편함이 없는 앞에서 유도한 가상 일률의 원리인 식 (16)을 이용하여 다물체계에 대한 운동방 정식을 유도한다.
2.4.1 다물체계에 대한 가상 일률의 원리
식 (16)으로 표현된 단일 물체에 대한 가상일률은 스칼라 양이다. 따라서 만약 개의 물체(기준물체는 제외)로 이루어 진 다물체계의 가상일률은 이들 개별 물체들의 가상일률들을 합산해 주면 된다. 따라서 개의 물체로 구성된 다물체계의 가상일률의 원리는 다음 식으로 나타낼 수 있다.
∙
∙
∙
×
∙
(17)
여기서,
,
,
및
는 다음과 같이 정의된 그 구성요소 가 벡터 및 텐서인 차원 행렬이다.
⋮
⋮
⋮ ⋱ ⋮⋯ ⋯
⋮ ⋱ ⋮⋯ ⋯
(18)(: 위치, : 각속도, : 질량, : 관성텐서)
각 행렬요소들의 상첨자(superscript)들은 다물체계를 구 성하는 물체를 나타낸다. 예를 들어 는 번째 물체의 질량 중심의 관성계에 대한 위치벡터, 는 번째 물체의 질량중 심에 대한 관성텐서를 나타낸다. 식 (17)이 우리가 원하는 다물체계에 대한 가상일률의 원리이다.
2.4.2 다물체계 구성물체 사이의 연계구조
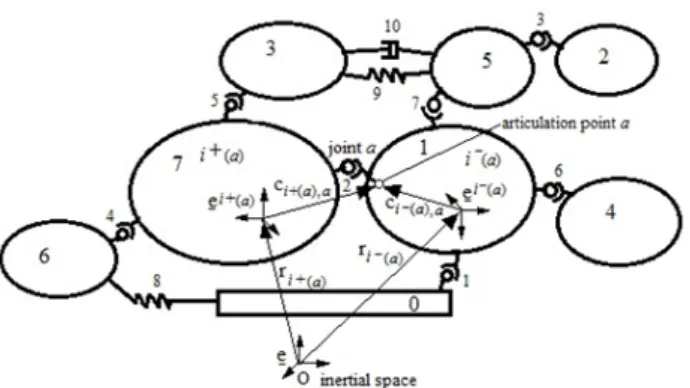
다물체계를 구성하는 요소는 운반물체(혹은 기준물체)를 포함하는 물체들 뿐 아니라 이들을 연결하는 조인트(joint) 와 스프링이나 댐퍼와 같은 힘요소(force element)들도 포 함한다. 조인트나 힘요소들은 연결요소들인데 가상일률의 원 리인 식 (17)에는 포함되어 있지 않다. 그 이유는 이들의 일 률은 0(zero)이기 때문이다. 그러나 이들은 다물체계를 구성 하는 중요한 요소들이기 때문에 이절에서는 이들에 대하여 기술하기로 한다. 조인트와 힘요소들의 차이점은 비록 이들 을 통하여 크기는 같고 방향이 반대인 힘들이 작용하더라도 조인트는 운동학적 구속력을 생성하지만 힘요소들은 이러한 구속력을 전혀 생성하지 않는다는 것이다. 한 가지 분명한 것은 두 물체 사이를 연결하는 조인트는 두 개 이상이 아닌 오직 한 개 뿐이라는 것이다. 두 물체 사이를 연결하는 조인 트의 운동자유도는 일반적으로 최대 다섯 개 이지만 만약에 전혀 연결이 없는 두 물체 사이의 구속이 없는 자유로운 운 동을 여섯 개의 자유도를 갖는 조인트로 정의하면 다물체계 의 물체들은 서로 상호 연계되어 있다고 할 수 있으며, 이런 경우 조인트의 자유도 는 1≤ ≤6의 범위를 갖는다고 이 야기 할 수 있다. 이는 또한 두 물체 사이에 적어도 한 개의 연결통로가 있음을 의미한다. 만약에 두 물체 사이의 연결통 로가 오직 한 개만 정의 된다면 다물체계는 나무 구조(tree structure)를 갖는다고 말하며 나무 구조(tree structure) 를 갖는 다물체계의 조인트변수들은 운동학적으로 전혀 구속 이 되어있지 않으며 전체 다물체계의 자유도는 개별 연결 조 인트들의 운동 자유도들을 모두 합한 것()과 같다. 나무형 구조를 갖지 않는 다물체계내의 두 물체 사이의 연결통로는 하나만이 아니며 전 다물체계은 하나의 닫힌 운동학적 사슬 (혹은 고리)를 형성한다. 이러한 사슬의 닫힘은 조인트들에 대한 구속을 야기한다. 따라서 이런 경우 전체 다물체계의
(a) Multibody system with joints and force elements.
Carrier body 0
(b) Directed graph
(c) Spanning tree(tree structure)
Fig. 2 A multibody system with joints and force elements. And its interconnection structure
(directed graph and spanning tree)
자유도는 개별 조인트들의 자유도를 전부 합한 것이 아니라 합한 값()에서 독립 구속식 들의 합(ν)를 뺀 ν이다.
조인트와 힘요소들은 다물체계의 두 물체 사이를 단독으로 혹은 함께 연결한다. 따라서 이들을 함께 연결이라 부른다.
보통 다물체계를 구성하는 물체들은 0,...,과 같이 번호를 부여하며 연결들은 1,...,과 같이 번호를 부여한다. 여기서 0은 운반물체(혹은 기준물체)를 의미한다. 보통 다물체계의 물체들은 한 개 이상의 힘요소들로 연결되어 있다. 다물체계 구성물체 사이의 연계구조를 파악하기 위해서는 이를 그래프 로 표시하는 것이 가장 좋은 방법이다(Fig. 2참조). Fig. 2 의 (a)는 운반체를 포함한 8개의 물체로 구성된 다물체계를 나타내며 각 구성 물체들은 조인트와 댐퍼, 스프링으로 서로 연결되어 있다. 8개의 물체는 7개의 조인트로 서로 연결되어 있으며 이외에 추가로 1개의 댐퍼 2개의 스프링으로 연결되
어 있다. Fig. 2의 (b)는 8개의 물체(점으로 표시)와 이들을 연결한 7개의 조인트(화살표가 있는 직선으로 표시) 및 댐퍼 와 스프링(화살표시가 있는 얇은 곡선으로 표시)을 표시한 유향그래프(directed graph)를 나타내며 Fig. 2의 (c)는 유향그래프에 댐퍼와 스프링을 제거한 그래프로 이를 한뼘나 무(spanning tree) 혹은 나무 구조(tree structure)라 부 른다. 특이한 것은 나무 구조에서는 의 관계가 성립한 다는 것이다. 유향그래프에서 제거된 댐퍼와 스프링을 나타 내는 선들을 현(chord)으로 부른다. 왜냐하면 악기의 현과 같은 곡선으로 그려졌기 때문이다. 현들은 1,...,들의 번호가 부여된다. 유향그래프에서 조인트나 힘요소를 나타내 는 임의의 선을 라 하자. 그러면 =1,...,의 값을 갖는 다(Fig. 2(a)의 조인트 참조). 로 연결되는 두 물체를 나타내는 두 꼭지점을 각각 와 라 하자(Fig.
1(a)참조). 는 시작물체를 나타내는 꼭지점을 는 끝나는 물체를 나타내는 꼭지점을 각각 나타낸다. 또한
와 는 모두 0부터 의 정수 값을 갖는 인자 의 함수들이다. 이를 토대로 다음과 같은 중요한 행렬들을 정의 할 수 있다. 먼저 정의되는 행렬은 전 유향그래프에 대해 다 음 식으로 정의되는 크기가 1 × 인 입사행렬(incidence matrix)이다.
그외
(19)
입사행렬은 다시
1 과
1 1 으로 나뉜다. 두 번째 행렬은 오직 나 무구조의 유향그래프(directed graph)에 대해서만 다음과 같이 정의 되는 크기가 × 인 경로행렬(path matrix)
이다.
(20)결론적으로 다물체계는 나무구조인 열린 운동연쇄(open kinematic chain)이거나 닫힌 운동연쇄(closed kinematic chain)중 하나의 구조를 갖는다. 그러나 대부분의 다물체계 는 구속을 갖는 닫힌 운동연쇄 구조이다. 따라서 운동방정식
1(선 가 두꼭지점 0과 사이의 경로에 있고 꼭지점 0쪽을 향할 때)
1(선 가 두꼭지점 0과 사이의 경로에 있고 꼭지점 쪽을 향할 때)
0(선 가 두꼭지점 0과 사이의 경로 에 있지 않을 때) (, 1,...,)
을 유도하는데 어려움이 있다.
2.4.3 일반좌표와 운동행렬
앞 절에서 언급했듯이 다물체계의 각 물체들을 연결하는 조 인트들의 운동 자유도 는 1과 6사이의 값이기 때문에 전체 다물체계의 운동 자유도는 적어도 이상이다. 을 모든 조인 트들의 운동 자유도 총합이라고 하면 다물체계의 총 운동 자유 도는 이거나 보다 작은 값을 갖는다.
(×1)를 다물체계의 위치와 회전을 명시하기에 적당한 일반 좌표들의 집합 또는 행렬이라 하자. 그러면 다물체계를 구성하 는 임의물체 의 질량중심의 관성계(inertial space)에 대한 위치벡터 는 일반좌표들과 시간 의 함수인
로 표시된다. 를 시간에 대하여 미분하면 속도
및 가 속도
에 대하여 다음과 같은 식을 얻는다.
(21)
여기서,
이며,
이다. 단 1 이고 1 이다. 따라서
크기는 ×행렬,
와
의 크기는 ( ×1)행렬이다.
일반성을 잃지 않고 같은 방법으로 각속도
및 각가속도
에 대해서도 다음과 같은 식을 얻는다.
(22)
여기서,
행렬들은 아직 미지이며 이 들은 운동행렬(kinematical matrix)들이라 부른다. 식 (21) 과 (22) 표현들을 가상일률의 원리인 식 (17)에 대입하면 다음과 같은 가상일률의 원리 식을 일반좌표에 대하여 얻을 수 있다.
∙
∙
∙
∙
∙
×
∙
∙
(23)
Fig. 2에서 조인트 의 관절점(articulation point) 는 꼭지점이 으로 표현된 물체에 고정되어 있다. 조인트 에 의하여 연결된 두 물체의 질량중심에서 관절점 까지의 위치벡터는 각각 및 이다. 일반적으로 물체
( 0)의 질량중심에서 관절점 ( 1)까지의 위 치벡터는 로 나타낸다. 그러면 다음과 같이 크기가 1
× 인 가중입사행렬를 정의할 수 있다.
(24)
가중입사행렬은 입사행렬과 같이
0와
로 나뉜다. Fig. 2에서
,
와
는 각각 물체 ,
그리고 관성계에 고정된 기저행렬들이다. 이들 사이의 관계는 식 (4)와 방향여현행렬을 이용하면 다음과 같다.
(25)
물체 (혹은 관절점 )의 물체 에 대한 상대속 도 및 상대가속도 는 식 (9)으로부터 기저행렬
에 대하여 위치벡터 의 시간에 대한 1차 미분 및 2차 미 분 값으로 각각 구할 수 있다. 1이기 때문에 전체 다물체계에 대하여 각 관절점들의 상대속도 및 상대가속도 행렬 및
는 다음과 같은 식으로 구할 수 있다.
,
(26)
역시 같은 방법으로 물체 (혹은 관절점 )의 물체
에 대한 상대각속도 및 상대각가속도 의 전 다물 체계에 대한 상대각속도 및 상대각가속도 행렬
및
도 다음식으로 구할 수 있다.
,
(27)
여기서,
,
,
,
및
,
들은 ( ×1)행렬,
와
는 × 행렬이다. 일반 적으로 식 (9)을 이용하면 조인트 에 의하여 연결된 두 물 체의 질량중심에서 관절점 까지의 위치벡터 및
의 시간에 대한 절대 일차 미분식을 다음과 같이 얻을
수 있다.
×
×
(28)
여기서, 와 는 각각 물체 와 의 각속도
이다. 이를 이용하면 물체 의 물체 에 대한 상대 각속도 는 다음 식으로 표시된다.
(29)
식 (28)을 이용하면 위치벡터에 대한 다음과 같은 시간에 대한 2차 미분관계식을 얻는다.
×
×
(30)
여기서,
≡
×
×
×
×
× ,
× 행렬 (31)
한편 물체 의 각속도 및 각가속도 는 다음과 같이 행렬식으로 표시될 수 있다.
(32)
여기서, 1이고 1 11 ×1 단위행렬이며
×1행렬이다. 또한
≡
× (33)
이다.
Fig. 2에서 관절점 의 위치벡터는 다음과 같다.
(34)
그러나 전 다물체계에서 임의 물체 의 질량중심의 위치벡 터, 속도벡터 및 가속도벡터는 다음과 같이 행렬식으로 표시 될 수 있다.
(35)
×
×
(36)
×
×
(37)
따라서 식 (26)과 (27)들을 식 (32)~(37)들에 대입하고 이
들을 식 (21)과 (22)들과 비교하면 운동행렬(kinematical matrices)에 대한 다음 식들을 얻을 수 있다.
×
(38)
×
(39)
×
×
(40)
(41)
2.4.4 열린 운동연쇄의 다물체계에 대한 운동방정식 열린 운동연쇄의 다물체계에 대해서는 어떤 구속조건 (constraint equation) 식도 없는 나무구조를 갖고 있기 때 문에 일반좌표(generalized coordinate)인 들은 서로 독립이며 전 다물체계의 총 자유도는 이다. 그러면 식 (23)의
는 독립인 임의이기 때문에 식 (23)으로부터 다음과 같은 운동방정식을 얻을 수 있다.
∙
∙
∙
∙
∙
×
∙
∙
(42)
2.4.5 닫힌 운동연쇄의 다물체계에 대한 운동방정식 닫힌 운동연쇄의 다물체계는 나무구조를 갖지 못하며 닫힌 운동연쇄을 형성하는 조인트 변수들은 구속조건식으로 상호 종속되어 있다. 이 경우 서로 독립인 조인트변수들의 총합인 다물체계의 자유도는 전 조인트 변수들의 총합인 보다 작 고 개의 조인트 변수들은 일부가 상호 종속이기 때문에 식 (23)으로부터 직접 식 (42)와 같이 운동방정식을 얻을 수 없다. 이 경우 보다 작은 자유도의 일반좌표들에 대한 운 동방정식은 두 단계에 의해 얻어질 수 있다. 첫 번째 단계는 다물체계를 열린 운동연쇄의 나무구조를 갖는 다물체계로 변 환하는 것이다. 그리고 이 나무구조의 다물체계에 대하여 앞 절에서 기술한 방법으로 운동행렬들(식 (38)~(41))을 유도한 다. 닫힌 운동연쇄의 다물체계를 나무구조의 열린 운동연쇄의 다믈체계로 변환하는 방법은 여러 가지가 있는데 조인트 제거 방법도 그중의 하나이다. 닫힌 운동연쇄의 다물체계에 대한 조인트 변수들의 구속조건 식은 여러 가지가 있으며 대표적 으로 일반좌표
와 시간 만의 함수로 이루어진
0 1 형식 구속조건식(holonomic constraint equa- tion),
및 시간 의 함수로 이루어진
0 1 형식 구속조건식(nonholonomic constraint equa- tion)이 있다. 두 번째 단계는 이들 구속조건 식들로부터 서로 독립인 일반좌표행렬 ×1(holonomic constraint
equation) 혹은 ×1(nonholonomic constraint equation) 크기의
에 관한 식을 유도한다. 이렇게 유도된 식은 다음과 같다.
(43)
는 크기가 × (holonomic constraint equa- tion) 혹은 × (nonholonomic constraint e-quation)인 행렬이다.
와
는 (×1)인 행렬이다. 식 (43)을 식 (23)에 대입하고
가 서로 독립인 임의임을 이 용하면 다음과 같은 운동방정식을 얻을 수 있다.
∙
∙
∙
∙
∙
×
∙
∙
∙
∙
∙
(44)
0 1 형식 구속조건식(nonholonomic constraint equation)인 경우 식 (44)와 함께 구속조건식이 운동방정식에 포함되어야 한다. 왜냐하면 이 경우도 총 자유도 가 이기 때문이다.
2.4.5 조인트에서의 구속 힘과 토크
조인트로 연결된 다물체계의 물체들은 조인트를 통해서 서 로 구속하는 힘과 토크가 전달된다. 이들 힘과 토크들은 뉴 튼의 작용 반작용의 법칙에 의하여 크기는 같고 방향은 반대 인 한 쌍으로 되어 있다. 다믈체계를 구성하는 임의 물체 에 있는 관절점 (Fig. 2(a)참조)를 통하여 물체 에 전달 되는 힘과 토크는 전 다물체계를 고려하였을 때 입사행렬을 이용하면 와 로 표현할 수 있다. 그런데 1 이므로 물체 에 작용하는 모든 구속 힘과 토크의 합 은 다음과 같다.
와
× (45)
물체 의 운동은 뉴튼의 운동방정식과 오일러의 운동방정식 을 만족해야 하므로 이를 행렬식으로 표현하면 다음과 같다.
∙
×
∙
×
(46) 식 (46)를 다시 쓰면 다음과 같다.
×
∙
×
∙
(47)
여기서,
이다. 만약에 다믈 체계가 나무구조를 가지고 있는 열린 운동연쇄이라면 의 관계가 성립한다. 그리고
의 관계가 성립하므로 식 (47)으로부터 조인트에서의 구속 힘과 토크를 다음 식으 로 구할 수 있다.
×
∙
×
∙
(48) 그러나 만약에 다물체계가 인 닫힌 운동연쇄이고 그 나무구조가 × 크기의 경로행렬
(여기서
은 나무구조의 × 크기의 입사행렬)이면 나무구조에 대 한 구속 힘과 토크는 식 (48)로 구할 수 있지만 전 다물체계 에 대한 구속 힘과 토크는 만약에 입사행렬
가 완전계수 (full rank)를 갖지 않던지 혹은
의 계수가 보다 작으면 일정한 값으로 결정할 수 없고 무수히 많이 존재한다. 임의 의 관절점 에서의 구속 힘 와 토크 는 직교조건 (orthogonal condition)을 만족한다.
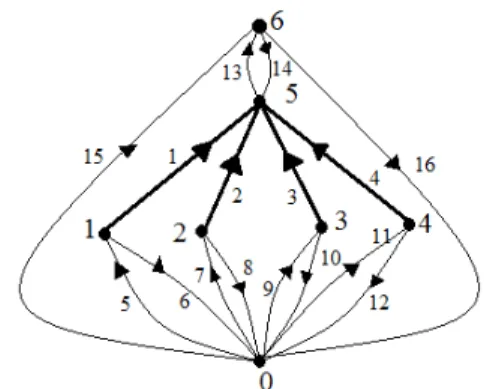
2.5 단순 다물체계 운동방정식의 유도 예시
본 논문을 통하여 제시하는 다물체계 운동방정식의 타당성 을 입증하기 위하여 다음 Fig. 3의 아주 간단한 다물체계의 운동방정식을 유도 한다. Fig. 3의 다물체계는 질량이 각각
, 인 두 개의 물체(기저물체 포함하면 세 개의 물체) 로 구성되어 있으며 각 물체들은 서로 조인트로 연결되어 있 다. 그림과 같은 두 개의 모멘트 가 작용하고 있을 때 다물체계의 운동방정식을 본 논문에서 제시하는 방법으로 유도하고자 한다. Fig. 3(a)로부터 물체는 0,1,2(=2) 이고 연결(조인트)은 1,2( 2)이다. 정수함수는 (1)
=0, (2)=1, (1)=1, (2)=2이다. 2이기 때문에 Fig. 3(a)의 다물체계는 Fig. 3(b)의 나무구조(tree structure)를 갖는 열린 운동연쇄계이다. 입사행렬 및 경로 행렬은 식 (19)와 (20) 그리고 Fig. 3(b)로부터 다음과 같 이 얻어진다.
(49)
관절점 1,2에 대한 상대속도()와 상대가속도()는
(a) Simple multibody system with an open kinematic chain.
are orthonormal unit vectors
(b) Directed graph(tree structure) for the simple multibody system
Fig. 3 Simple multibody system with an open kinematic chain and its directed graph
0, 0이다. 상대각속도()와 상대각가속 도()는 이다. 따라서 식 (26)과 (27)은 다음과 같이 된다.
(50)
(51)
또한 식 (33)으로부터
이 얻어진다. Fig. 3(a)로 부터 상대위치 벡터 는 다음과 같이 얻어진다.
(52)
따라서 가중입사행렬은
(53)이고 식 (30)으로부터
(54)이다.
따라서, 이들을 이용하면 운동행렬들은 다음과 같이 얻어진다.
(55)
또한 식 (25)으로부터
(56)
따라서,
임을 이용하면 운동방정식 (42)는 다음과 같이 유도된다.
(57)
이는 Shabana의 책(Shabana, 2010)에서 뉴튼의 운동 방정식과 오일러의 운동방정식으로부터 직접 유도된 운동방 정식과 정확하게 일치함을 알 수 있다. 역시 식 (48)으로부 터 각 조인트에 발생하는 반력과 토크를 구할 수 있다.
2.6 다물체계에서 충돌에 의한 충격력
본 절에서는 Fig. 4와 같이 다물체계의 각 물체 에 충격 력 가 작용하는 경우를 고려한다. 물체 의 질량중심 에 대해서 위치벡터가 인 충돌점 O에 충격력 가 작용하면