CopyrightⒸ2014 KSAE / 131-06 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.5.035 Transactions of KSAE, Vol. 22, No. 5, pp.35-43 (2014)
상용차용 디젤엔진의 Engine ECU_ILS 시스템 개발
고 영 진*
전북자동차기술원 선행기술연구팀
Development of Engine ECU_ILS System for Diesel Engine of Commercial Vehicle
Youngjin Ko*
Advanced Technology Research Team, Jeonbuk Institute of Automotive Technology, 6 Dongjangsan 2-gil, Gunsan-si, Jeonbuk 573-882, Korea
(Received 7 October 2013 / Revised 2 January 2014 / Accepted 3 January 2014)
Abstract : The automobile industry requires technological innovations to reduce fuel consumption with the public interest in environmental conservation in recent years. Thus, the hybrid system is applied not only to passenger cars but also commercial vehicles. The purpose of this paper is to develop engine ECU_ILS to develop commercial hybrid vehicles. In order to develop the engine and vehicle, the dynamometer and exhaust gas analyzer is needed. However, a lot of time and cost are required. In contrast, the model-based development environment that can be applied to a variety of test conditions can reduce development time. Therefore, a HILS system environment that can consider the behavior of actual vehicles for evaluation of the control logic, fuel consumption and exhaust gas is required. This engine ECU_ILS system was developed in this study, can analyze parameter such as the fuel injection rate, fuel injection time, fuel consumption and exhaust gas like the actual vehicle test using map data. Also, this system is expected to be able to analyze the characteristic of vehicle behavior and the development of peripheral device in relation to engine and vehicles. This HILS system can be used to develop control strategies of commercial hybrid vehicle systems in the future.
Key words : Commercail vehicle(상용차량), ECU_ILS(ECU_in the loop simulation, 컨트롤 유닛 연계 시뮬레이션), HILS(hardware_in the loop simulation, 하드웨어 연계 시뮬레이션), Hybrid vehicle(하이브리드 차량)
1. 서 론1)
전 세계 자동차 산업이 그린 카 개발에 총력을 기 울이고 있는 상황에서 최근 상용차 업계에서도 고 효율 친환경 차량개발을 위해 기존 내연기관의 성 능, 연비향상 및 배기규제 만족을 위한 기술 개발을 비롯하여 미래 지향형 차량개발에도 더욱 속도를 높이고 있다.
상용차량은 승용차량과는 다르게 동급(출력) 차 량이라 하더라도 사용 목적 및 환경이 매우 다양하
*Corresponding author, E-mail: [email protected]
며, 복합적이고 변동성이 큰 부하 조건에서 운전되 는 특징을 갖고 있다. 이와 같이 상용차량만의 특수 성을 고려한다면, 차량 개발에 있어 개발 시간과 비 용을 단축시킬 수 있는 모델기반 제어기술과 HILS (hardware-in-the-loop simulation)환경의 필요성이 요 구된다.1)
가상현실을 이용한 제어로직 설계는 이미 자동차 분야에서 광범위하게 활용되고 있고 많은 전문 업체 들이 차량모델을 개발하고 있다. 하지만 차량의 시스 템을 통합적으로 구축하여 제어전략 및 성능을 평가 할 수 있는 체계적인 개발 시스템이 부족한 실정이다.
고 영 진
상용차의 엔진 및 구동시스템을 개발함에 있어 동력계 및 배기 분석기와 같은 평가시스템을 이용 해 동력성능을 평가하는 것이 필수적인 요소이나, 그에 따른 막대한 시간과 비용이 소비된다.
최근 각 업계에서는 개발 시간과 비용 절감을 통 한 제품의 경쟁력을 높여야 하는 상황에 직면하고 있어 이를 해결하기 위한 대안으로 가상환경과 실 차량의 거동을 고려할 수 있는 HILS 환경을 이용하 여 엔진을 제어하기 위한 로직 개발, 연비 및 배출가 스를 평가할 수 있는 기술이 개발되고 있다. 엔진을 개발하는 과정에서 Matlab/simulink나 AMESim 등 을 이용한 엔진 모델링, 가상의 주행조건에 따라 운 전되는 엔진동력계 등 HILS 기술의 활용사례가 증 가하고 있다.2-6)
본 연구에서는 GVW 10톤급 차량을 대상으로 6 리터의 디젤엔진(현대자동차, D6GA)에 대하여 HILS 시스템을 개발하는데 목적이 있다. 연구실 단 위에서 모델기반 시뮬레이션과 엔진 ECU를 인터페 이스 하여 엔진의 거동을 해석하고 그에 따라 제어 로직을 개발함과 동시에 제어성능의 신뢰성을 검증 할 수 있고, 엔진 ECU_ILS을 이용하여 엔진의 운전 전략 및 주변장치를 개발할 수 있는 환경을 제시한다.
2. 엔진 ECU_ILS 환경 구축 2.1 실시간 제어시스템의 기본 구성
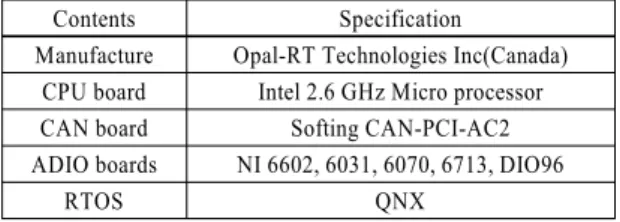
엔진 ECU_ILS는 한 개의 Host와 세 개의 실시간 운영체제(RTOS)가 탑재된 Target node으로 구성된 다. Table 1은 실시간 제어시스템의 하드웨어에 대 한 제원을 보여주고 있다. Fig. 1과 같이 Host와 각 Target는 Ethernet으로 연결되며 Target간은 Firewire cable로 연결되어 빠른 데이터의 전송속도를 확보 하고 차량 상태를 실시간 모니터링 할 수 있도록 CAN통신 분석 장치와 자가 진단기를 구축하였다.
Table 1 Specifications of the real-time control system
Contents Specification
Manufacture Opal-RT Technologies Inc(Canada) CPU board Intel 2.6 GHz Micro processor CAN board Softing CAN-PCI-AC2 ADIO boards NI 6602, 6031, 6070, 6713, DIO96
RTOS QNX
Fig. 1 Hardware configuration of the HILS
본 연구에서 차량 시뮬레이션을 수행하기 위해 M.S.C사의 TruckSim을 사용하였고, 사용자 인터페 이스에 대한 시스템 제어 모델 및 엔진 모델은 Matlab/simulink 를 활용하여 모델링된다.
2.2 Engine ECU_ILS 시스템 개발
기본적으로 실시간 제어를 원하는 엔지니어들이 사용하는 산업용 소프트웨어인 RT_LAB을 기반으 로 시스템 제어 및 차량에 대해 모델링된다. HILS 시스템 환경에서 시뮬레이션을 수행하기 위해서 Fig. 2와 같이 기본 3개의 블록으로 구성된다.7,8) 마 스터 블록으로 SM_Vehicle block은 TruckSim의 차 량모델과 연동되는 기능을 수행하고, 슬레이브 블 록으로 SS_ System block은 엔진모델, 아날로그 및 디지털 입․출력의 신호를 처리하는 모델을 포함하 고 있다. 사용자가 모니터링 할 수 있는 SC_Monitor 는 실시간 디스플레이 및 데이터 저장을 위해 사용 된다.
Fig. 2 Overall real-time model for engine ECU-ILS 2.2.1 운전자 인터페이스 모델링
SS_ System block은 크게 사용자 인터페이스를 위
상용차용 디젤엔진의 Engine ECU_ILS 시스템 개발
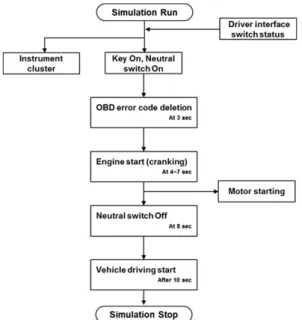
Fig. 4 Control blocks for all of the system Fig. 3 Procedure for performing the simulation
한 제어모델과 엔진 모델을 포함하고 있다. 제어모 델은 시뮬레이션이 수행되는 시간과 하드웨어의 실
제 동작절차를 고려하여 차량에서 운전자의 행위를 순차적으로 수행되도록 모델링되었다. Fig. 3은 시 뮬레이션의 실행 절차를 나타내고 있다. 또한 엔진 ECU에서 내부 메모리의 에러 코드를 삭제하기 위 한 명령어를 CAN 통신을 이용하여 전송하는 기능 이 포함되어 있다. 그리고 순차적으로 엔진모델 및 차량모델이 동작할 수 있도록 모델링되었다.
Fig. 4는 시스템을 제어하는 모델을 보여주고 있 으며, 위의 시뮬레이션 수행 절차와 운전자가 조작 하는 스위치, 경고등 그리고 각종 센서의 신호를 모 사하는 모델들로 구성되어 있다.
하드웨어에 관련된 사항은 모두 이 모델을 통해 서 제어가 되고 있다. 차량 모델은 TruckSim을 사용 하지만 엔진모델은 대상 엔진의 특성을 반영한 모 델이 필요함에 따라 모델링이 수행되었으며, 엔진 의 센서 모델 등은 다음 장에서 기술되고 있다.
2.2.2 엔진 모델링
엔진 모델은 TruckSim에서 운전자의 요구부하와 차량속도를 기반으로 엔진속도, 엔진 정격출력, 토
Youngjin Ko
(a) Look-up table of the engine characteristics
(b) Data conversion block Fig. 5 Overall engine model
Table 2 Specifications of target engine
Parameter Value
Inertia (kg・m2) 1.15
Displacement volume (cc) 5,899 Max. power (ps/rpm) 250/2500 Max. torque (kg・m/rpm) 87/1400
Number of cylinder 6
Catalyst CDPF
크 및 시간당 연료 소비량 등이 시험 데이터를 바탕 으로 해석된다. 본 엔진모델은 상용차 GVW 10톤급 차량의 6ℓ디젤엔진으로 제원은 Table 2와 같고, 이 를 근거로 Fig. 5와 같이 모델링을 수행하였다.
엔진모델에 사용된 데이터는 실차 시험에서 취득 된 데이터로서 연료압력, 흡기온도/압력, 엔진토크, 연료소모량과 같은 데이터는 Fig. 5와 같이 look-up table로 구성하여 엔진의 거동해석에 사용되었다.
Development of Engine ECU_ILS System for Diesel Engine of Commercial Vehicle
흡입공기량의 센서 신호를 모사하기 위하여 look-up table의 흡기온도와 압력을 이용하여 흡입 공기량은 식 (1)과 (2)에 의하여 산출된다. 여기서, 체적효율은 98%로 가정하고 P(pa)는 압력, T(k)는 온도, N(rad/s) 은 회전속도, (m3)는 엔진 배기량, (kg/m3)는 흡 기밀도, 는 체적효율을 나타낸다.
× ⋅
(1)
⋅⋅⋅ (2)
흡입 공기량은 EGR를 제어하는데 중요한 요소로 작용하기 때문에 신호를 구현하는 것은 매우 중요 하다. 그리고 엔진모델의 핵심인 엔진의 회전속도 를 산출하는 것은 Newton's Angular momentum 보존 법칙을 이용하여 엔진과 클러치(torque converter)사 이의 토크차로 회전속도를 식 (3)과 같이 구할 수 있 다. 여기서, (kg・m2)는 엔진 크랭크축 관성, (Nm)는 엔진 출력토크, (Nm)는 클러치 토크, (Nm)는 스타터 토크를 나타낸다.
(3) 또한, look-up table 데이터를 이용하여 단위 시간 당 연료 소모량을 나타내는 BSFC와 평균유효압력 (MEP) 등을 산출할 수 있다.
HILS 환경과 실제 엔진 ECU 간 인터페이스 하여 성능을 평가하는 것은 ECU 관련 정보와 각종 센서 의 특성 분석 등 수학적 모델링 작업이 요구된다.
2.2.3 엔진 센서의 분석 및 모사
전자 제어식 CRDI(common-rail direction injection) 시스템을 갖춘 디젤엔진은 연비 개선과 배출가스 저감을 위해 다수의 센서들이 존재한다. 따라서 엔 진 없이 ECU의 정상적인 동작을 위하여 반드시 입 력해야 할 센서 신호들이 있다. 크랭크 각도센서, 캠 위치 센서, 차속센서, 액셀페달 위치센서, 흡입 공기 량 센서, 냉각수 온도센서 등이 있다. 해당 센서들은 수학적 모델을 이용하여 신호가 모사되어야만 한 다. 아날로그 타입의 센서 신호들은 수학적 모델과 아날로그 보드를 이용하여 구현되고 오픈 루프제어 에 해당하는 연료압력 조절 밸브나 인젝터의 솔레
노이드 부분은 모체에서 분리하여 직접 ECU에 연 결하는 방법을 채택하였다. 엔진 관련 센서 중 핵심 적인 센서는 엔진의 회전수를 측정하는 크랭크각도 센서와 피스톤의 상사점 위치를 측정하는 CAM 위 치 센서이다. 두 센서의 신호는 동기화되어 1번 실 린더의 연료 분사 시점을 파악하는데 사용된다.
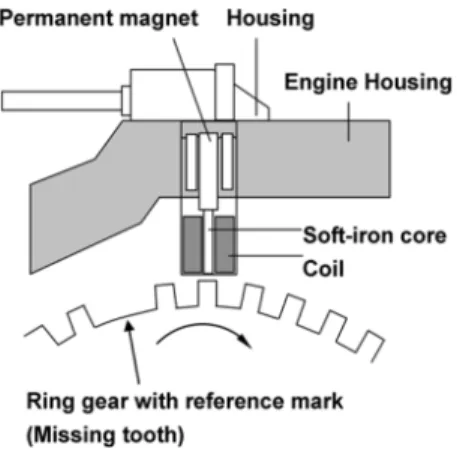
Fig. 6은 크랭크 각도 센서의 구조에 대해 보여주 고 있다. 플라이휠 하우징 외주면의 링 기어가 회전 하면서 센서와 링 기어 사이의 자속의 변화에 의해 이빨 수만큼의 사인파가 생성된다. 또한 피스톤의 상사점 위치를 파악하기 위해 일부 링 기어를 제거 (missing tooth) 하는데 대상 엔진은 플라이휠이 1회 전당 6도 간격으로 사인파를 생성하고 미싱투스 4 개를 제외한 56개의 펄스가 생성된다.
캠 위치센서의 신호는 1회전에 7개의 pulse가 생 성되고 크랭크축이 2회 전당 1주기의 사각파 신호 가 출력된다. 또한 크랭크 각도센서와 캠 위치센서 는 서로 동기화가 되었을 때, 두 신호를 ECU에서 인 식하고 정상적으로 동작을 한다. 두 센서의 신호는 MCU(AVR 90CAN 128, Atmel)를 사용하여 신호를 출력할 수 있도록 보드를 제작하였다. 일반적으로 FPGA 보드를 이용하지만 비용이 많이 들고 다루기 가 어렵기 때문에 저가의 MCU를 선택하고 범용성 을 높인 것이 장점이다.
엔진 ECU HILS 시스템의 성능검증과 차량 시뮬 레이션 수행 중 엔진 ECU가 정상적으로 동작을 하 는지 여부를 확인 할 수 있는 인젝터 전류펄스를 측 정할 수 있는 보드를 제작하였다.
Fig. 6 Structure of the engine speed sensor
고 영 진
Fig. 8 Blocks for the CAN communication Fig. 7 Circuit board to capture the injector drive signal
Fig. 7은 제작된 인젝터의 구동펄스 측정보드와 측정 데이터를 보여주고 있다. 6기통 엔진에 해당하 는 6개의 인젝터가 연결될 수 있도록 전류센서 (LMS, LTS 6-NP)를 이용하여 제작하였다. 응답속도 는 300 μs이며 최대 20A까지 측정할 수 있다. 이 보 드를 제작함으로써 차량시뮬레이션 수행 중 엔진운 전에 따라 연료의 분사패턴을 분석할 수 있고, 구동 펄스의 주기를 계산함에 따라 분사된 연료량을 산 술적으로 예측할 수 있다.
2.2.4 CAN 분석 및 모델링
엔진 ECU의 정상동작 상태를 모니터링하기 위하
여 CAN통신 분석 모델과 자기진단 기능인 OBD(on board diagnostics)관련 CAN통신은 모델링되었다.
시뮬레이션 시작 3초 이후 ECU에 등록된 에러 코드 를 삭제하기 위하여 삭제 명령어를 전송하도록 모 델링하였다. 그리고 EGR 컨트롤러 및 ABS로부터 요구되는 ID(identifier)에 대하여 모델링 하였다.
Fig. 8과 같이 설계된 모델은 엔진속도, 차량속도, 흡 기온도, 흡기압력, 연료 소모량 등을 분석할 수 있도 록 모델링되었다.
일반적으로 차량의 CAN통신을 분석할 때 차량 제조사에서 제공하는 *.dbc 파일을 사용하지만 이 파일을 확보하지 못 해도 J1939규격을 만족하는 정 보들에 대해선 분석이 가능하다.
지금까지 엔진 ECU_ILS 시스템 구축을 위한 내 용을 기술하였으며, Fig. 9와 같이 구축하였다.
3. Engine ECU_ILS 검증 및 시험결과 엔진 ECU_ILS 시스템을 검증하기 위해서 Fig. 10 과 같이 유럽 인증모드인 NEDC(new European driving cycle) 시험법을 이용하였다.
상용차용 디젤엔진의 Engine ECU_ILS 시스템 개발
Fig. 9 Photograph of the HILS system
Fig. 10 NEDC schedule for the simulation
차량 시뮬레이션을 수행하면서 크랭크 각도센서, 캠 위치센서, 차속센서, 공기량 센서, 냉각수 온도와 흡입공기 온도센서 등의 에뮬레이션 신호를 단계별 로 검증하고 ECU에서 제대로 인식하는지 여부를 알아보기 위하여 스캐너와 CAN 분석 툴을 연결하 였다. 스캐너를 연결하고 오류코드를 검색했을 때 오류코드는 발생하지 않았고 정상적인 신호로 인식 되어 값이 모니터링 되고 있었다. CAN 통신 또한 에 뮬레이션된 센서 신호들이 정상적으로 인식되는 것 이 확인되었다. Fig. 11은 엔진속도와 캠 위치센서의 신호에 따른 인젝터의 구동펄스를 1 ms로 취득한 결과이며, 주행시 연료분사 전략을 간략하게 분석 할 수 있다. 실시간 시뮬레이션을 위한 해석 시간 (Fixed-step size)이 1 ms이기 때문에 고주파수로 출 력되는 엔진속도 신호와 μs 단위 시간으로 구동되 는 인젝터 구동신호를 취득할 때 제대로 나타낼 수 가 없었다. 또한, 1 ms 샘플시간으로 데이터를 저장 할 경우 데이터의 양이 많아 표현하기 어렵기 때문 에 20 ms의 샘플링 시간을 적용하여 데이터를 저장 하였다. 연료분사는 기본적으로 파일럿 분사와 메
Fig. 11 Result of the injector drive signal acquisition during simulation
인분사로 구분되며, 고부하 운전 영역에서는 DPF의 재생을 위한 후 분사가 이루어지는 것을 확인할 수 있었다. 메인 연료 분사 시기는 10° BTDC~10°
ATDC 로 분석된다. 또한, 엔진 아이들, 탄력주행 및 감속시 연료를 분사하지 않는 실린더가 존재하는 등 엔진 브레이크 기능을 수행하고 있는 것을 확인 할 수 있었다.
Fig. 12는 같은 시험 조건에서 가속페달 입력에 의해 엔진 거동에 따른 엔진 ECU의 CAN 통신을 통해서 얻은 결과를 나타낸 것이다. 엔진속도, 엔 진토크, 연료 소모량 그리고 EGR 밸브의 각도에 대한 결과를 나타내고 있다. 이 결과로 볼 때, 엔진 ECU는 정상적으로 엔진을 제어하고 있다고 판단 할 수 있다.
Fig. 13은 엔진모델의 연비 맵을 바탕으로 NEDC cycle을 이용한 연료소모량에 대한 시뮬레이션 결 과이며 실시간 연료 분사량과 누적 소모량을 취득 할 수 있어 차량의 연료소모량을 계산할 수 있었 다.
Youngjin Ko
Fig. 12 Simulation results about the engine data using the NEDC schedule
Fig. 13 Test results of fuel consumed for NEDC schedule
4. 결 론
상용차의 6ℓ 디젤엔진을 대상으로 엔진 ECU_ILS 시스템을 개발하였고, 엔진 ECU 개발과 차량의 연 비 및 주변장치를 개발과 평가를 동시에 수행할 수 있는 시스템을 구축하였고, 다음과 같은 연구 결과 를 얻었다.
1) 엔진 ECU_ILS 시스템은 ECU 내부 메모리에 등 록된 에러코드를 삭제하기 위하여 자가 진단기에서 수동으로 삭제하는 방식에서 벗어나 OBD CAN 통신을 이용하여 자동으로 삭제할 수 있었다.
2) 차량에서 운전자의 조작 행위를 재현하는 모델과 엔진의 핵심 센서인 크랭크 각도센서와 캠 위치 센서의 신호 모사를 위해 MCU를 이용하여 구현 하였다. 그리고 인젝터의 구동 신호를 취득하여 분사된 연료량과 분사 전력을 예측할 수 있었다.
3) 엔진 ECU와 EGR 컨트롤러사이에 CAN통신으 로 EGR 밸브를 제어함에 있어, 흡입 공기량을 계 산하여 센서 신호를 모사하고 엔진의 운전 영역에 대한 EGR 밸브의 제어패턴을 분석할 수 있었다.
4) 엔진 ECU_ILS 시스템의 성능을 검증하기 위하 여 NEDC 모드를 이용하였고, 다양한 엔진의 제 어 파라메타를 분석함으로써 엔진 ECU는 정상 적으로 엔진을 제어하고 있다고 판단할 수 있다.
References
1) Y. Ko, S. Cho, K. Park and Y. Ro, “Commercial HEV Performance Simulation Model Develop- ment,” KSAE Annual Conference Proceedings, pp.2024-2029, 2008.
2) M. Yoon, W. Lee and M. Sunwoo, “Develop- ment and Implementation of Distributed Hard- ware-in-the-loop Simulator for Automotive Engine Control System,” Int. J. Automotive Technology, Vol.6, No.2, pp.107-117, 2005.
3) J. Youn, J. Ma, M. Sunwoo and W. Lee,
“Model Based Design and Validation of Control Systems using Real-time Operating System,” Transactions of KSAE, Vol.16, No.2, pp.8-17, 2008.
4) K. Morita, K. Shimamura, S. Yamaguchi, K.
Furumachi, N. Osaki, S. Nakamura, K. Naru- sawa and K. J. Myong, “Development of a Fuel Economy and Exhaust Emissions Test Method with HILS for Heavy-duty HEVs,” SAE 2008-01-1318, 2008.
5) M. Kim, G. Lee, J. Lee, J. Lee, H. Yoo and M.
Kim, “Analysis of Hydraulic Characteristics and Modelling of Piezo Actuator for High
Development of Engine ECU_ILS System for Diesel Engine of Commercial Vehicle
Pressure Fuel Injection,” KSAE Spring Conference Proceedings, pp.315-319, 2011.
6) I. Jo, J. Lee and J. Lee, “Characteristic Eva- luation of Analytic Model Based on AMESim for CRDI Injector,” KSAE Annual Conference
Proceedings, pp.321-326, 2011.
7) Opal-RT Technologies Inc., RT-LAB User's Guide, 2009.
8) Opal-RT Technologies Inc., RT-EVENT User's Guide, 2009.