CopyrightⒸ2014 KSAE / 127-03 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2014.22.1.020 Transactions of KSAE, Vol. 22, No. 1, pp.20-28 (2014)
차량 전복 방지를 위한 정적 출력 피드백 제어기 설계
임 성 진1)․오 동 호*2)
서울과학기술대학교 기계자동차공학과1)․충남대학교 기계공학과2)
Design of Static Output Feedback Controllers for Rollover Prevention
Seongjin Yim1)․Dongho Oh*2)
1)Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 139-743, Korea
2)Department of Mechanical Engineering, Chungnam National University, Daejeon 305-764, Korea (Received 14 January 2013 / Revised 1 August 2013 / Accepted 2 August 2013)
Abstract : This paper presents static output feedback LQ and H∞ controllers for rollover prevention. Linear quadratic static output feedback controllers have been proposed for rollover prevention in such a way to minimize the lateral acceleration and the roll angle. Rollover prevention capability can be enhanced if H∞ controller is designed. To avoid full-state measurement for feedback requirement or sensitiveness of an observer to nonlinear model error, static output feedback is adopted. To design static output feedback controllers, Kosut's method is adopted because it is simple to calculate. Differential braking and active anti-roll bar are adopted as actuators that generate yaw and roll moments, respectively. The proposed method is shown to be effective in preventing rollover through the simulations on nonlinear multi-body dynamic simulation software, CarSim.
Key words : Rollover prevention(전복 방지), H∞ controller(H∞ 제어기), Static output feedback(정적 출력 궤환), LMI(선형행렬부등식)
Nomenclature1) ay : lateral acceleration (m/s2)
Cf, Cr : cornering stiffness of front/rear tires (N/rad) Cφ : roll damping coefficient (Nms/rad)
eγ : yaw rate error (rad/s)
Fyf, Fyr : lateral tire force of front/rear wheels (N) Fx, Fz : longitudinal/vertical tire forces of a wheel (N) Mφ : roll moment generated by active anti-roll bar (Nm) g : gravitational acceleration constant (9.81 m/s2) H : effectiveness matrix
h : height of C.G. from ground (m) hs : height of C.G. from a roll center (m)
*Corresponding author, E-mail: [email protected]
Ix, Iz : roll/yaw moment of inertia about roll/yaw axes (kg・m2)
J : linear quadratic cost function JWLS : objective function of WLS K : static output feedback gain KB : pressure-force constant (N/MPa) Kγ : steady state gain of reference yaw rate Kφ : roll damping coefficient (Nm/rad) lf, lr : distance from C.G. to front/rear axles (m) MB : control yaw moment (Nm)
m : vehicle total mass (kg) ms : sprung mass (kg) PB : brake pressure (MPa) qi : weights on the terms in J
차량 전복 방지를 위한 정적 출력 피드백 제어기 설계
r : radius of a wheel (m)
vx, vy : longitudinal/lateral velocities of a vehicle (m/s) W : weighting matrix of WLS
αf, αr : tire slip angle of front/rear wheels (rad) γ : yaw rate (rad/s)
γd : reference yaw rate (rad/s) φ : roll angle (rad) and roll rate (rad/s) δf : front steering angle (rad)
μ : tire-road friction coefficient
τ : time constant of the first-order system for reference yaw rate
1. 서 론
1990년대 후반부터 급속하게 보급되기 시작한 SUV의 영향으로 차량 전복 사고가 크게 증가하였 다. 차량 전복 사고는 전체 교통사고에서 차지하는 비중은 작지만 사망자의 큰 부분을 차지한다. 예를 들어 2002년도 미국의 경우 차량 전복은 전체 교통 사고의 3%였지만 차량 전복으로 인한 사망자는 33%에 이를 정도로 큰 비중을 차지했다.1) 또한 이후 8년동안 36%에서 33%로 줄어들었을 뿐이다.2) 이에 따라 주요 선진국에서는 차량의 전복을 방지하기 위한 장치나 제어기를 다양한 형태로 개발하고 있다.
일반적으로 차량 전복은 고속 주행시 고마찰 노 면에서 과도한 조향에 의해 횡가속도가 급격하게 증가하여 발생한다. 따라서 대부분의 차량 전복 방 지 방법은 차량의 기준요율을 저하시켜 선회반경을 크게 하고 차량의 횡가속도를 줄임으로써 차량의 전복을 방지한다. 대표적인 방법으로는 윤장열3)과 임성진4)의 방법이 있다. 이 방법들은 전상태 피드백 (full-state feedback: FSF)을 사용하고 있지만 현실적 으로 모든 상태변수를 계측 또는 예측하는 쉽지 않 은 일이다. 전상태 피드백을 이용하기 위해서는 횡 속도 또는 횡슬립각 관측기를 설계해야만 한다.5) 하 지만 차량시스템은 대부분 비선형이며 비선형 관측 기를 설계한다고 해도 차량 전복 상황에서는 상태 변수 값을 제대로 관측하지 못한다. 따라서 관측기 와 전상태 피드백을 이용하지 않고 이용 가능한 센 서 신호를 그대로 제어에 이용하는 정적 출력 피드 백 제어기를 이용하여 차량의 전복을 방지할 수 있
는 효과적인 방법이 필요하다.6)
본 논문에서는 2자유도 자전거 모델과 1자유도 롤모델을 기반으로 이산시간 선형 차량 모델을 구 성하고 정적 출력 피드백 제어기를 설계하여 차량 전복 방지를 위해 적용하는 방법을 제안한다. 전상 태 피드백은 현실적으로 불가능하므로 계측가능한 센서 신호만을 이용하는 정적 출력(static output feedback: SOF) 피드백 제어기를 설계한다. 기존의 연구에서는 선형 2차(linear quadratic: LQ) 정적 출력 피드백 제어기를 설계하여 차량 전복 방지 문제에 적용하였다.4) 본 논문에서는 기존에 설계된 LQ SOF 와 차량 전복 방지 성능을 비교하기 위해 H∞ 정적 출력 제어기를 설계한다. 요 모멘트를 생성하기 위 해서는 차동제동, 롤모멘트를 생성하기 위해서는 능동 안티롤바를 이용한다. 제안된 방법의 타당성 을 검증하기 위해 차량 시뮬레이션 패키지 CarSim 에서 시뮬레이션을 수행한다.7)
본 논문의 구성은 다음과 같다. 2장에서는 차량의 모델을 구성하고 제어기 설계 방법을 제시한다. 3장 에서는 설계된 제어기를 이용하여 시뮬레이션을 수 행하고 결과를 검토한 후 4장에서 결론을 맺는다.
2. H∞ 제어기 설계
본 장에서는 먼저 차량 모델을 구성하고 기존의 방법으로서 LQ 최적 정적 출력 제어기를 설계한 후 이후 H∞ 정적 출력 제어기를 설계하는 방법을 제시 한다.
2.1 차량 모델
본 논문에서는 Fig. 1에서와 같이 2자유도 자전거 모델과 1자유도 롤 모델을 이용한다.8)
Fig. 1에 있는 모델들의 운동방정식은 다음과 같 다.
y s s yf yr
ma −m hφ&&=F +F (1)
z f yf r yr B
Iγ&=l F −l F +M (2)
x s s y s s
Iφ&&−m h a = −Cφφ&−Kφφ+m ghφ+Mφ (3) 식 (1), (2), 그리고 (3)는 각각 횡방향, 요방향, 롤
Seongjin Yim․Dongho Oh
(a) 2-DOF bicycle model
(b) 1-DOF roll model Fig. 1 Vehicle models
방향 운동을 나타낸다. 식 (2)에서 MB는 차동 제동에 의해 만들어지는 요 모멘트이며 식 (3)에서 Mφ는 능 동 안티롤바에 의해 만들어지는 롤 모멘트이다. 식 (3)에서 차량의 횡가속도는 식 (4)와 같은 관계로 표 현할 수 있다.
y y x
a = +v&
γ
v (4)식 (1)과 (2)에서 타이어 횡력 Fyf와 Fyr은 식 (5)와 같이 선형으로 나타낼 수 있다.
yf f f, yr r r
F = −C α F = −Cα (5)
y f , y r
f f r
x x
v l v l
v v
γ γ
α = + −δ α = − (6)
차량이 추종해야 할 기준요율은 운전자의 조향에 의해 결정되며 식 (7)과 같이 표현된다.9) 이 식을 상 태공간 형태로 표현하면 식 (8)과 같다.
d 1 f
K s
γ γ δ
τ
⎛ ⎞
=⎜⎝ + ⎟⎠⋅ (7)
1
d d f
Kγ
γ γ δ
τ τ
= − +
& (8)
차량의 요율 에러는 식 (9)와 같이 표현된다.
eγ = −γ γd (9)
위의 식들을 종합하면 식 (10)과 같은 정의에 따 라 식 (11)과 같은 상태공간 모델을 얻을 수 있다.
T
y d
T B
f
v M Mφ
γ φ φ γ
δ
⎡ ⎤
≡ ⎣ ⎦
⎡ ⎤
≡ ⎣ ⎦
≡ x u w
&
(10)
1 1 1
1 2 1 2
11 12
21 22
1 2
0 0 0
0 0 0 0
0 0 0 ,
0 0 0 1 0
0 0 0 0 1
0 0 0
0 0 0
0 0 ,
0 0 1 0 0
0 0 0 0 1
0 01 0
0 , 0 1
0
s s s e e e
s s
z
s s x
s s x s s
e
f
f f
e e
r
m m h
I
m h I
a a
a a
m h v C m gh K
C l C
K
ϕ φ
τ
τ
− − −
= + + = + +
⎡ − ⎤
⎢ ⎥
⎢ ⎥
= −⎢ ⎥
⎢ ⎥
⎣ ⎦
⎡ ⎤
⎢ ⎥
⎢ − − ⎥
= ⎢ ⎥
⎢ ⎥
⎢ − ⎥
⎢ ⎥
⎣ ⎦
⎡ ⎤
⎢ ⎥
⎢ ⎥
=⎢ ⎥ =
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
x A x B w B u E A x E B w E B u
E
A
B B
&
0 00 0
⎡ ⎤
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
(11)
식 (11)에서 각 항은 다음과 같다.
11 12
2 2
21 22
, ,
,
f r f f r r
x
x x
f f r r f f r r
x x
C C l C l C
a a mv
v v
l C l C l C l C
a a
v v
+ −
= − = − −
− +
= − = −
(12)
식 (11)을 샘플링 시간 Ts에 대해 이산화하면 식 (13)과 같은 이산시간 상태공간 방정식을 얻을 수 있다.
(
k+ =1) ( )
k + 1( )
k + 2( )
kx Ax B w B u (13)
( ( ) )
1 0 1
, s ,
s s T
A T
s s
e τ τd
≡ ≡
∫
A B A B
( ( ) )
2 0 2
Ts
s τ τd s
≡
∫
B A B
Design of Static Output Feedback Controllers for Rollover Prevention
2.2 LQ 정적 출력 제어기 설계
차량 전복 방지를 위한 선형 2차 목적 함수는 다 음과 같다.
( ) ( ) ( )
( ) ( ) ( )
2 2 2
1 2 3
2 2 2
1 4 5 6
y
k B
q a k q e k q k
J q k q M k q M k
γ
φ
φ φ
∞
=
⎡ + + ⎤
= ⎢ ⎥
+ + +
⎢ ⎥
⎣ ⎦
∑ & (14)
식 (14)의 목적 함수에서 가중치 qi는 Bryson's rule 에 의해 qi=1/ηi2로 결정된다.10) 여기서 ηi는 각 상태 변수의 허용 가능한 최대값이다.
식 (14)는 다음과 같이 식 (15)로 형태로 표현된다.
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
2 2 2 2
1
1
T
k
T T T
T T
k
J k k k k
k k k k
k k k k
∞
=
∞
=
= ⎡⎣ + ⎤ ⎡⎦ ⎣ + ⎤⎦
⎡ + ⎤
= ⎢ ⎥
+ +
⎢ ⎥
⎣ ⎦
∑
∑
C x D u C x D u
x Qx u N x
x Nu u Ru
(15)
식 (15)에서 Q, N, R, C2와 D2는 다음과 같다.
( )
2 2 2 2 2 2
1 11 1 12
2 2
1 2 4
3
1 11
11 2 12
5 6
, ,
0 0 0
0 0 0
0 0 0 0 ,
0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0
0 0
0 0 0
0 , 0 0
0 0
0
0 0
T T T
q a q a vx
q q
q q
q b
q q
≡ ≡ ≡
⎡ + ⎤
⎢ ⎥
⎢ − ⎥
⎢ ⎥
= ≡ ⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
⎡ ⎤
⎡ ⎤
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
≡⎢ ⎥ = ≡ ⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦ ⎣ ⎦
Q C C N C D R D D
C C
D D D
(16)
전상태 피드백을 피하기 위해 u(k)=Ky(k) 형태의 정적 출력 피드백 제어기를 사용한다. LQ 최적 제어 문제는 LQ 목적 함수 (14)를 최소로 하는 제어기 게 인 K를 구하는 문제가 된다.
계측가능한 센서 출력은 롤각속도, 요율에러, 횡 가속도이며 식 (17)로 표현된다.
( ) ( )
011 120 0 0 01 0 0( )
0 1 0 0 1
y x
a a a v
k k k
eγ φ
⎡ ⎤ ⎡ + ⎤
⎢ ⎥ ⎢ ⎥
=⎢ ⎥⎢ ⎥⎣ ⎦≡ =⎢⎣ − ⎥⎦
y & Cx x (17)
최적의 K는 Rosinova에 의해 제안된 알고리즘을 이용하여 쉽게 구할 수 있다.11)
2.3 H∞ 제어기 설계
LQ 최적 제어가 식 (11)의 LQ 목적 함수를 최적화 하는 것을 목적으로 한다면 H∞ 제어는 식 (18)로 표 현되는 이산시간 상태공간 방정식에서 얻어진, 입 력 w에서 출력 z로의 전달함수 (19)의 최대 특이치, 즉 식 (20)에서 정의된 H∞ 놈 γ를 최소화하는 것을 목적으로 한다.12) 식 (18)에서 C1, D11, D12의 정의는 식 (16)과 같다.
( ) ( ) ( ) ( )
( )
1( )
11 1( )
122( )
1
k k k k
k k k k
+ = + +
= + +
x Ax B w B u
z C x D w D u (18)
( )
z = 1(
z −)
+ 1( )
k + 11H C I A Β w D (19)
( )
z ∞<γH (20)
제어기 형태는 앞서 제시한대로 전상태 피드백을 피하기 위해 u(k)=Ky(k) 형태의 정적 출력 피드백 제 어기를 사용한다. 전상태 피드백을 사용하는 경우 최적의 게인 K를 구하는 데에는 여러 가지 방법들 이 제안되어 있다. 가장 대표적인 방법이 LMI를 이 용하는 방법이다.13,14) 하지만 이 방법의 경우 복잡 한 과정을 거쳐 LMI를 구성해야 하며 해당 해가 최 적으로 수렴한다는 보장도 없다. 따라서 본 논문에 서는 간단하게 K를 구할 수 있는 방법으로 식 (21)과 같이 Kosut이 제안한 방법을 이용한다.15) 식 (21)에 서 KFS는 전상태 피드백 최적 게인이다.
( )
1T T
FS
= −
K K C CC (21)
2.4 요모멘트 분배
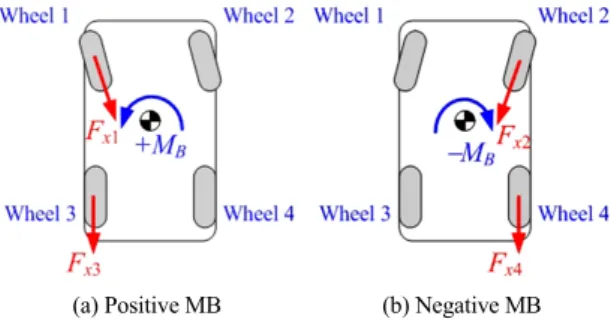
식 (10)에서 롤 모멘트 제어 입력은 곧바로 능동 안티롤바의 제어 입력으로 적용될 수 있지만 요 모 멘트 제어 입력은 차량의 제동입력에 의해 생성되 어져야 한다. 이를 위해 가중 최소제곱법을 이용한 요모멘트 분배를 이용한다.4,16) Fig. 2는 MB의 방향 에 따른 타이어력 분포를 보여 준다. Fig. 2에서 보듯
임성진․오동호
(a) Positive MB (b) Negative MB Fig. 2 Relationship between tire forces and control yaw
moment according to the sign of control yaw moment
이 MB가 양인 경우, 제동력은 왼쪽 차륜에만 가해져 야 한다.
MB가 양인 경우 타이어력과 요모멘트와의 관계 는 식 (22)와 같다.
{
1 3
cos sin
2 2
x
f f f B
x
t t F
l M
F
H u
δ δ ⎡ ⎤
⎡− + − ⎤⎢ ⎥=
⎢ ⎥
⎣ ⎦ ⎣ ⎦
1444442444443 (22)
최적화의 목적 함수는 식 (23)과 같다. 식 (23)에 서 타이어 수직력 Fz는 종가속도와 횡가속도를 이 용하여 예측할 수 있다.17)
2 2
1 3
2 2
1 3
x x T
WLS
z z
F F
J u Wu
F F
= + = (23)
식 (22)의 제한조건을 가지고 식 (23)의 목적 함수 를 최소화하는 문제는 라그랑지 승수 기법을 이용 하여 식 (24)와 같은 해를 쉽게 구할 수 있다.
( )
11 T 1 T
opt B
u =W H− HW H− − M (24) 이렇게 구해진 타이어력은 식 (25)를 이용하여 각 차륜의 제동 압력으로 변환된다. 식 (25)에서 r은 타 이어 반지름이며 KB는 압력-타이어력 변환 상수이다.
B x
B
P r F
=K ⋅ (25)
3. 시뮬레이션
제안된 방법의 타당성을 검증하기 위해 시뮬레이 션을 수행한다. 먼저 구해진 제어기에 대해 선형 모 델을 이용하여 Bode 선도 해석을 통해 각 제어기의
특성을 파악한다. 이후 차량 시뮬레이션 패키지인 CarSim에서의 시뮬레이션을 통해 각 제어기의 특성 을 파악한다.
실제 구현에서 롤 모멘트를 생성하기 위한 능동 안티롤바와 요 모멘트를 생성하기 위한 제동 입력 은 개별적으로 적용가능하다. 하지만 이 둘은 서로 관련이 없음이 최근 연구에 의해 제시되었다.19) 만 약 차량 전복 방지를 위해 능동 안티롤바를 이용하 여 롤 모멘트만을 적용하는 경우 차량은 안정성을 잃고 회전하면서 미끄러지게 된다.20) 반대로 요 모 멘트만을 적용하는 경우 롤 운동은 전혀 제어하지 못하게 되어 차량 전복을 방지하지 못하게 된다.
3.1 Bode 선도 해석
선형 모델에 사용된 차량 파라미터는 CarSim에 있는 소형 SUV 모델에서 가져 왔으며 자세한 값은 Table 1과 같다.7)
식 (14)의 LQ 목적 함수에 있는 각 가중치는 차량 의 전복을 방지하기 위해 설정되어야 한다. 차량이 운전자의 의도를 추종하기 위해서는 요율 에러 eγ가 최소화되어야 한다. 이와 더불어 차량의 전복을 방 지하기 위해서는 차량의 롤각과 롤각속도가 최소화 되어야 하며 이를 위해 q1, q3, 그리고 q4가 크게 설정 되어야 한다. 이에 따라 가중치를 Table 2와 같이 설 정하였다.
Fig. 3은 각 제어기에 대해 작성한 Bode 선도로서 운전자의 조향 입력에 대해 각 출력을 보여 준다.
Fig. 3에서 LQR은 전상태 피드백 LQ 제어기, LQ SOF는 LQ 정적 출력 제어기, H-inf는 전상태 피드백 Table 1 Parameters and values of small SUV model in CarSim
M 1,146.6 kg hs 0.51 m
ms 984.6 kg Cf 27,800 N/rad
Ix 442 kgm2 Cr 27,800 N/rad
Iz 1,302 kgm2 Cφ 1,000 Nms/rad
lf 0.88 m Kφ 54,000 Nm/rad
lr 1.32 m vx 60 km/h
Table 2 Weights in LQ cost function
η1 5 m/s2 η2 1 deg
η3 3 deg/s η4 0.08 rad/s
η5 5000 Nm η6 2000 Nm
차량 전복 방지를 위한 정적 출력 피드백 제어기 설계
(a) Steering to roll angle
(b) Steering to yaw rate error
(c) Steering to lateral acceleration Fig. 3 Bode plots for each controller
H∞ 제어기, 그리고 H-inf SOF는 정적 출력 피드백 H∞
제어기를 나타낸다. Fig. 3의 (a)에서 보듯이 롤 운동
제어에 있어서 전상태 피드백 H∞ 제어기가 가장 좋 은 성능을 보임을 알 수 있다. 그리고 전상태 피드백 에 비해 정적 출력 피드백의 경우 그 성능이 저하됨 을 알 수 있다. 이 결과를 Fig. 3의 (b), (c)와 비교해 보면 롤 각이 작을수록 요율 에러는 증가하고 횡가 속도는 감소하는 것을 알 수 있다. 차량의 롤 운동을 횡가속도에 의해 생겨나는데 롤 각이 감소한 것은 는 식 (4)의 관계에 의해서 횡가속도를 줄이기 위해 차량의 요율이 감소하고 요율 에러가 증가했기 때 문이다. Fig. 3에서 보듯이 정적 출력 피드백은 전상 태 피드백에 비해서 롤 운동과 요 운동을 제대로 제 어하지 못하는 것을 알 수 있다.
3.2 CarSim 시뮬레이션
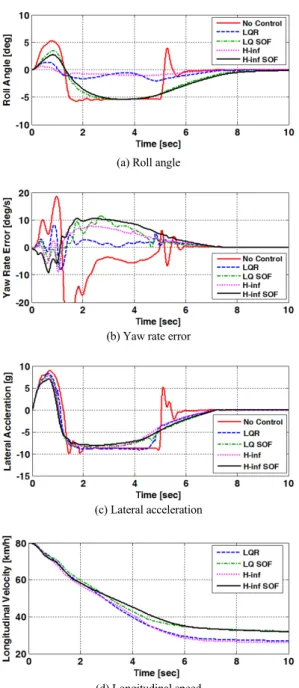
앞 절에서 설계된 각 제어기들을 CarSim에서 시 뮬레이션한다. 제어기는 LQR, LQ SOF, H∞ FSF, 그 리고 H∞ SOF다. 운전자의 조향 입력은 차량 전복 시 험에 이용되는 fishhook 조향으로서 최대 조향각은 221 deg이다.18) 노면 마찰계수는 1.0으로 설정하였 고 차량의 초기 속도는 80 km/h이다.
Fig. 4는 각 제어기에 대한 시뮬레이션 결과를 보 여 준다. Fig. 4의 (a)와 (b)에서 보듯이 정적 출력 피 드백 제어기들은 전상태 피드백 제어기에 비해 요 율 에러와 롤 각의 관점에서 저하된 성능을 보여 준 다. 이것은 Fig. 5의 (a)에서 보듯이 제어 롤 모멘트 가 감소했기 때문이다. 횡방향 운동의 경우 Fig. 4의 (b), (c)와 (d)에서 보듯이 정적 출력 피드백 제어기 를 이용한 경우 횡가속도는 감소했고 요율 에러는 증가했음을 알 수 있다. 이것은 앞절에서 설명한 대 로 식 (4)의 관계에 의해 차량의 요율이 감소했기 때 문이며 이에 따라 차량은 Fig. 6에서와 같이 언더스 티어 경향을 보인다. Fig. 4의 (d)에서 보듯이 정적 출력 피드백 제어기를 이용한 경우 차량의 속도가 덜 감소하였음을 알 수 있다. 이것은 정적 출력 피드 백 제어기들의 제동 입력이 감소했기 때문인데 이 사실은 Fig. 5의 (c)에서 확인할 수 있다. 이와 같은 사실을 바탕으로 정적 출력 제어기들은 차량의 요 율을 감소시킴으로써, 즉 요율 에러를 증가시키고 차량이 언더스티어 경향을 가지게 하여 횡가속도를 감소시키고 차량의 전복을 방지함을 알 수 있다.
Seongjin Yim․Dongho Oh
(a) Roll angle
(b) Yaw rate error
(c) Lateral acceleration
(d) Longitudinal speed Fig. 4 Simulation results for each controller
Fig. 4와 5의 결과들에서 볼 수 있듯이 LQ 정적 출 력 제어기와 H∞ 정적 출력 제어기는 서로 동등한 결 과를 보임을 알 수 있다. 이는 전상태 피드백에 비해 정적 출력 피드백 제어기가 횡속도값을 사용하지 못 하여 성능이 저하되기 때문이며 결과적으로 동일한 센서 출력값을 이용하는 정적 출력 피드백의 경우 LQ 제어기와 H∞ 제어기가 동등한 성능을 보인다.
(a) Control roll moment for each controller
(b) Control yaw moment for each controller
(c) Applied brake pressures for each controller Fig. 5 Control inputs of each controller
Fig. 6 Trajectories for each controller
Design of Static Output Feedback Controllers for Rollover Prevention
4. 결 론
1) 본 논문에서는 차량 전복을 방지하기 위해 이산시 간 영역에서 정적 출력 피드백 LQ 및 H∞ 제어기를 설계하는 방법을 제안하였다.
2) 전상태 피드백과 비선형 모델 오차에 민감한 관측 기 사용을 피하기 위해 정적 출력 피드백을 이용하 였다.
3) 제안된 제어기는 전상태 피드백을 이용하는 제어 기 에 비해 차량을 언더스티어 경향을 가지도록 함 으로써 차량의 전복을 방지함을 알 수 있다.
4) 정적 출력 피드백 LQ 제어기와 H∞ 제어기는 전상 태 피드백에 비해 성능이 저하되었으며 차량 전복 에 있어 서로 동등한 성능을 보임을 확인하였다.
후 기
이 연구는 충남대학교 학술연구비에 의해 지원되었음.
References
1) National Highway Traffic Safety Administration,
“Motor Vehicle Traffic Crash Injury and Fatality Estimates, 2002 Early Assessment,” NCSA(Na- tional Center for Statistics and Analysis) Ad- vanced Research and Analysis, 2003.
2) Fatality Analysis Reporting System (FARS), http://www-fars.nhtsa.dot.gov, 2009.
3) J. Yoon, K. Yi and D. Kim, “Rollover Index- based Rollover Mitigation System,” Int. J. Auto- motive Technology, Vol.7, No.7, pp.821-826, 2006.
4) S. Yim, “Design of a Robust Controller for Rollover Prevention with Active Suspension and Differential Braking,” Journal of Mecha- nical Science and Technology, Vol.25, No.6, pp.1565-1571 , 2012.
5) Y. Fukada, “Slip-angle Estimation for Vehicle Stability Control,” Vehicle System Dynamics, Vol.32, Issues 4-5, pp.375-388, 1999.
6) W. S. Levine and M. Athans, “On the Deter- mination of Optimal Constant Output Feedback Gains for Linear Multivariable Systems,” IEEE Transactions on Automatic Control, Vol.15, No.1, pp.44-48, 1970.
7) Mechanical Simulation Corporation, CarSim User Manual Ver.5, 2001.
8) S. Yim, “Design of a Preview Controller for Vehicle Rollover Prevention,” IEEE Transac- tions on Vehicular Technology, Vol.60, No.9, pp.4217-4226 , 2011.
9) R. Rajamani, Vehicle Dynamics and Control, Springer, 2006.
10) A. E. Bryson and Y. C. Ho, Applied Optimal Control, Hempsphere, New York, 1975.
11) D. Rosinova, V. Vesely and V. Kucera, “A Necessary and Sufficient Condition for Static Output Feedback Stabilization of Linear Discrete- time Systems,” Kybernetika, Vol.39, No.4, pp.447-459, 2003.
12) P. Gahinet, A. Nemirovski, A. J. Laub and M.
Chilali, LMI Control Toolbox User’s Guide, Natick, MA: The MathWorks, 1995.
13) J. Xu, C. E. de Souza and L. Xie, A Scaling LMI Approach to Output Feedback Control of Discrete-time LTI Systems, IEEE International Conference on Control and Automation, pp.42-46, 2007.
14) G. L. Bara and M. Boutayeb, “Static Output Feedback Stabilization with Performance for Linear Discrete-time Systems,” IEEE Transac- tions on Automatic Control, Vol.50, No.2, pp.250-254, 2005.
15) R. L. Kosut, “Suboptimal Control of Linear Time-invariant Systems Subject to Control Structure Constraints,” IEEE Transactions on Automatic Control, AC-15, pp.557-563, 1970.
16) J. Wang and R. G. Longoria, “Coordinated Vehicle Dynamics Control with Control Distri- bution,” Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA, pp.5348-5353, 2006.
17) W. Cho, J. Yoon, J. Kim, J. Hur and K. Yi, “An Investigation into Unified Chassis Control Scheme for Optimised Vehicle Stability and Maneuverability,” Vehicle System Dynamics, Vol.46, Supplement, pp.87-105, 2008.
18) National Highway Traffic Safety Administ- ration, “Testing the Dynamic Rollover Resist- ance of Two 15-Passenger Vans with Multiple
임성진․오동호
Load Configurations,” US Department of Transportation, 2004.
19) S. Yim, C. W. Lim and M. Oh, “An Investiga- tion into Structures of Linear Quadratic Con- trollers for Vehicle Rollover Prevention,”
Proceedings of IMechE, Part D: Journal of Automobile Engineering, Vol.227, No.4, pp.472-
480, 2013.
20) S. Yim and K. Yi, “Design of an Active Roll Control System for Hybrid 4WD Vehicles,”
Proceedings of IMechE, Part D: Journal of Automobile Engineering, Vol. 227, pp.151-163, 2013.