Journal of Institute of Control, Robotics and Systems (2011) 17(7):625-628 DOI:10.5302/J.ICROS.2011.17.7.625 ISSN:1976-5622 eISSN:2233-4335
서론 I.
[1-6]. [7]
. [8],
[11]
. [7,8,11]
. [8,11]
LMI .
. 대상 시스템
II.
.
(1)
∈ ∈ ,
,
, ∈ .
* (Corresponding Author)
: 2011. 3. 11., : 2011. 4. 19., : 2011. 5. 3.
A1: .
A2: A3: ≦ ≦
A4: ≦ .
A5: . [8] [11]
[8] [11]
. A5 III
. 주요 결과 III.
LMI .
∗ ∗ ∗ ∗∗ ∗
(2)
∈ × ∈× ∈ ∈
∗
, ,
× . .
정리 1: (1) . LMI (2)
.
Integral Sliding Mode Controller Design for Unmatched Uncertain Systems
* (Han Ho Choi1)
1Dongguk Univ. - Seoul
Abstract: This paper presents an LMI-based method to design an integral sliding mode controller for a class of uncertain systems with unmatched uncertainties. The uncertain system under consideration may have unmatched parameter uncertainties in the state matrix as well as in the input matrix. Using LMIs an existence condition of a sliding surface is derived. And a switching feedback control law is given. Finally, numerical examples are given to show that the proposed method can be better than the existing results for some cases.
Keywords: LMI (Linear Matrix Inequality), uncertain system, sliding mode
Copyright© ICROS 2011
626 최 한 호
(3) .
(4)
∈
(5)
.
(6)
.
.
증명:
[1,2]
. A5
. A3 .
≦ .
≧ (7)
≦
0 .
. (1), (4), (5) .
(8)
[1,2] (8)
.
(9)
(1) (9)
.
(10)
.
(11)
(11) (10)
.
(12)
.
(13)
(12)
.
∗ (14)
(7) .
≦ (15)
(15) .
∗≦
(16) [9] Schur complement
(14) .
∗ ∗ ∗
∗ (17)1 A3 (17)
.
∗ ∗ ∗
∗ (18)(18) [9] Schur complement
(2)
. (10) .
0
. (4) (5)
. (8) (3)
3 ≦
.
.
주 1: [9] 101 (A, B)
(2) 1 1
LMI .
∗
(A, B) LMI (2)
.
주 2: [8] LMI
[11]
⋅ ≫
비정합 불확실성을 갖는 시스템을 위한 적분 슬라이딩 모드 제어기 설계 627
[8] [11]
.
. 수치적 예
IV.
[10,11] F4E 5000
. .
(19)
[10,11]
.
(20)
≦ ≦ ,
≦ . [1-7]
. (20) .
(21)
, .
(2) .
(22)
.
. 1 (22)
. (20)
.
≦
≦ [8]
[11] . [8] [11]
. [8] [11]
. 2 .
LMI(19)
2 . [8,11]
2 .
[8] .
(23)
.
(24)
≦ ≦ . LMI (2)
.
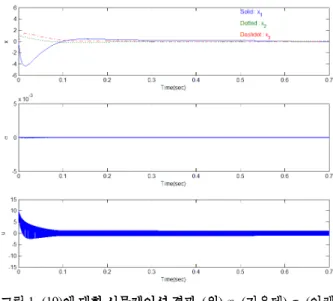
1. (19) . ( ), ( ), ( )
Fig. 1. Simulation results for (19). (Top), (Middle) , (Bottom)
2. (19) . ( ) , (
) [11] , ( ) [8] .
Fig. 2. Feasible region for (19). (Top) proposed method, (Middle) Choi [11], (Bottom) Choi [8].
628최 한 호
(25)
.
. 3 (25)
. LMI
(23)
4
. [8,11]
4 .
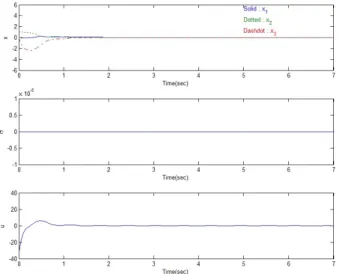
3. (23) . ( ), ( ), ( )
Fig. 3. Simulation results for (23). (Top), (Middle) , (Bottom)
4. (23) . ( ) , (
) [11] , ( ) [8] .
Fig. 4. Feasible region for (23). (Top) proposed method, (Middle) Choi [11], (Bottom) Choi [8].
결론 V.
. . 참고문헌
[1] R. A. DeCarlo, S. H. Zak, and G. P. Mathews, “Variable structure control of nonlinear multivariable systems: A tu- torial,” IEEE Proceedings, vol. 76, no. 3, pp. 212-232, Mar. 1988.
[2] V. I. Utkin, “Variable structure systems with sliding modes,” IEEE Transactions on Automatic Control, vol.
22, no. 2, pp. 212-222, Feb. 1977.
[3] C. Edwards, “A practical method for the design of slid- ing mode controllers using linear matrix inequalites,”
Automatica, vol. 40, no. 10, pp. 1761-1769, Oct. 2004.
[4] C. Edwards, A. Akoachere, and S. K. Spurgeon, “Sliding mode output feedback controller design using linear ma- trix inequalities,” IEEE Transactions on Automatic Control, vol. 46, no. 1, pp. 115-119, Jan. 2001.
[5] H. H. Choi, “An improved existence condition of linear sliding surfaces,” Journal of Control, Automation, and Systems Engineering (in Korean), vol. 13, no. 9, pp.
851-855, Sep. 2007.
[6] H. H. Choi, “An LMI-based design of reduced order ob- servers substitutable for full order sliding mode ob- servers,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 14, no. 3, pp. 232-235, Mar.
2008
[7] J. Ackermann and V. I. Utkin, “Sliding mode control design based on Ackermann's formula,” IEEE Transac- tions on Automatic Control, vol. 43, no. 2, pp. 234-237, Feb. 1998.
[8] H. H. Choi, “LMI-based sliding surface design for in- tegral sliding mode control of mismatched uncertain sys- tems,” IEEE Transactions on Automatic Control, vol. 52.
no. 4, pp. 736-742, Apr. 2007.
[9] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in system and Control Theory, Philadelphia, SIAM, 1994.
[10] U. Shaked “An LPD approach to robust and ∞
static output-feedback design,” IEEE Transactions on Automatic Control, vol. 48, no. 5, pp. 866-872, May 2003.
[11] H. H. Choi, “LMI-based design of integral sliding mode controllers for mismatched uncertain systems,”
Transactions of Korea Institute of Electrical Engineers, vol. 59, no. 8, pp. 1441-1443, 2010.
최 한 호
․ ․ 13 9 .