1. 서론 1.1 서론
2016년을 기준으로 4인가구당 자동차 보유대수는 약 1.55대로 매년 약 6%이상의 증가율을 보이며 늘어났다.
차량의 증가는 곧 사고율의 증가로, 교통안전에 대한 사
도로안전시설물 평가를 위한 가상현실 운전 시뮬레이션 구축
채병훈, 채호근, 이주연*
아주대학교 산업공학과
Virtual Reality Driving Simulation for Evaluation of Road Safety Facilities
Byeong Hoon Chae, Ho Keun Chae, Joo Yeoun Lee
*Division of Industrial Engineering, Ajou University
요 약 본 논문은 신기술이 융합된 도로안전시설물에 대한 평가기준 탐색 및 평가를 위한 가상현실 시뮬레이션 환경 구축 을 목적으로 하였다. 가상현실 시뮬레이션을 위해서는 높은 현실감과 정확한 행동 데이터 추출이 필요하다. 이를 위해 Unreal Engine을 활용하여 주변 환경을 외부환경과 차량환경으로 나눠 제작하였다. 외부환경은 주변 환경, 날씨, 시간대, 타 차량으로 나눠 제작하였으며 차량환경은 승용차와 화물차를 요인으로 제작하였다. 이후, 발광 도로표지병에 대한 샘플 시뮬레이션 제작 및 사전실험을 진행하여, 도로표지병이 5m 간격이 10m 간격보다 더 차선유도를 잘한다는 결과를 나타냈 다. 이는 차후 새로운 기술이 접목된 새로운 도로안전시설물에 대한 평가기준에 대한 탐색을 위한 시뮬레이션 작성에서도 활용 가능하다는 것을 확인할 수 있었다. 향후, 다른 도로시설물에 대한 모델링 및 샘플 컴포넌트를 추가하여 다양한 환경에 대한 시뮬레이션이 가능하도록 할 수 있을 것이다.
주제어 : 도로안전시설물, 가상현실, 시뮬레이션, 도로표지병, 콘텐츠
Abstract
The purpose of this study is to construct a virtual reality simulation environment for searching and evaluating evaluation criteria for road safety facilities with new technologies. Virtual reality simulation requires high realism and accurate behavior data extraction. To do this, we used the Unreal Engine to create the environment by dividing it into an external environment and a vehicle environment. After that, a sample simulation for the luminescent road markers and preliminary experiments were conducted. As a result, luminescent road markers showed better 5m interval than 10m interval. It can be confirmed that it can be used in the simulation for searching the evaluation criteria for the new road safety facilities that incorporate the new technology in the future. In the future, it will be possible to simulate various environments by adding modeling and sample components for other road facilities.Key Words :
Road safety facilities, Virtual Reality, Simulation, Road Sign, Contents*This work was supported by Ministry of Trade, Industry and Energy(MOTIE) and Korea Institute for Advancement of Technology (KIAT) of the Republic of Koreaunder Grant (N0001083).
*Corresponding Author : Joo-Yeoun Lee([email protected]) Received May 10, 2018
Accepted July 20, 2018
Revised June 14, 2018 Published July 28, 2018
회적 관심과 요구가 증대되고 있다[1]. 교통사고를 예방 하기 위해 도로안전시설물을 다양한 곳에 설치하는 방법 이 있다.
최근에는 도로안전시설물과 다양한 기술을 접목하는 기술과 이를 실제 도로에 적용하는 사례가 증가하고 있 다[2, 3]. 예를 들어 태양광 충전지가 들어간 도로표지병, LED 시선 유도 시설, 도로상황정보 수집을 위한 IoT 도 로 표지판 등을 예로 들 수 있다. 하지만 새로운 기술이 접목된 도로안전 시설물에 대한 평가기준에 대한 정립이 되어있지 않다. 예를 들어 시선유도시설의 경우, 재귀반 사 시선유도시설물에 대한 기준만 존재하며, LED 등, 발 광 시선유도물에 대한 밝기에 대한 지침이 정립되어 있 지 않다.
도로안전시설물을 설치하고 평가하기 위해서는 기간 이 오래 걸리며, 비용적인 측면에서 또한 부담이 되며, 실 험 등에 따른 위험 등의 부정적인 영향이 있을 수 있다 [4]. 이를 위해 새로운 기술이 접목된 도로안전 시설물에 대한 평가기준 확인과 평가를 경제적이며, 안전하게 평 가하기 위한 시뮬레이션이 필요하다.
가상현실(Virtual Reality)은 컴퓨터에서 만들어진 환 경 혹은 상황을 사용자에게 제공하며, 사용자와 상호작 용을 통해 몰입감을 극대화하는 인터페이스라고 할 수 있다[5, 6]. 가상현실의 하드웨어와 소프트웨어의 발전에 따라 게임뿐만 아니라 의료, 건축, 교육, 제품설계, 소매 등 다양한 분야에서 활용되고 있다[7, 8]. 가상현실의 최 대 장점으로는 실제로 일어날 확률이 적은 환경 혹은 상 황을 만들고, 실제로 겪어보거나 상호작용을 통해 다양 한 정보를 얻을 수 있다는 점이다[9, 10]. 새로운 기술이 융합된 도로안전 시설물에 대한 평가를 위한 기준을 탐 색하고, 그 기준을 평가 할 수 있는 가상환경 운전 시뮬 레이션 구축을 그 목표로 한다.
1.2 선행연구
이창호 등(2003)은, 운전연습을 위한 가상현실 차량 시뮬레이터를 개발했으며, 이를 통해 숙련도 평가를 진 행하는 등, 운전 시뮬레이션의 기능에 초점을 맞춰 개발 하였다[11]. 여기서의 가상현실은 일반 모니터에 뿌려지 는 형식으로, 비교적 최근의 가상현실이라 말할 수 있는 HMD나, CAVE같은 기기와는 다른 형식으로 만들어졌 다.
전우훈, 조혜진(2004)은 도로주행 안전성 평가를 위한
방법론에 대한 실험 계획 및 각 요소에 대하여 정량적 평 가에 대한 설계를 진행하였다[12]. 해당 논문에서는 각 평가 요소 제시와 이를 위한 평가 방법에 대하여 설명하 였다.
양대중 등(2016)은 가상현실 내에서 기능적 발목 불안 정성을 가진 축구선수들의 점프 수행력 및 균형능력을 위해 가상현실 기반 훈련과 일반 트레드밀 훈련의 수행 력의 차이를 비교하였다[13]. 이는 가상현실 내에서의 시 뮬레이션이 유의하다는 결과를 이끌어 내었다.
김종민 등(2007)은 도로 시설물에 대한 평가를 위해 한국건설기술연구원의 도로주행 시뮬레이터(K-ROADS 2007)를 활용하였다[14]. 본 시뮬레이터는 다양한 도로시 설의 인적요인을 평가하기 위한 시뮬레이터로써 시력, 조명, 안개, 강우 등에 대한 재현 및 활용 범위를 갖고 있 다. 하지만 차량조작행동, 속도, 궤적 등에 대한 데이터를 추출하는데 한계가 있었다.
따라서 본 논문에서는 현실감 높은 환경구축과 사용 자 행동에 따른 주행데이터를 통해 도로안전 시설물 평 가 기준 탐색과 평가를 위한 가상현실 운전 시뮬레이션 을 구축하고자 한다.
2. 시뮬레이션 구축
2.1 구축 엔진
최근 가상현실의 선두주자로 불리는 기업으로는 Unreal engine과 Unity를 들 수 있다[15]. Unity는 스마트폰 게 임 기반의 3D로 폭넓은 범용성과 개발자들의 쉬운 접근 성을 갖고 있다. 반면, Unreal engine은 높은 렌더링 기술 과 뛰어난 텍스처 구현으로 높은 현실감을 보여주고 있 다. 이에 본 논문에서는 Unreal engine을 활용하여 가상 환경을 구축하였다.
2.2 주변 환경
주변 환경을 구축을 위해 현실감 높은 텍스처들을 활 용하여 주변 환경에 대한 컴포넌트를 제작하였다.
2.2.1 도로 환경
가상현실 운전 시뮬레이션을 구축하기 전, 관련 분야 전문가 설문을 통해 Table 1과 같은 주변 환경에서 주요 한 결정인자를 추출하였다.
Key factors Content
Road Environment
Around the road Urban / Rural
Other cars -
Weather Foggy / Sunny
Time Daytime / Nighttime
Vehicle Environment
Driver Height
Sedan / Truck Car Type
Table 1. Key factors in the evaluation of road safety facilities
도로의 주변 환경은 도심지와 시외지로 구분되었고, 외부환경을 구축하기 위한 컴포넌트를 설정하였다. Fig.
1은 시뮬레이션 편집 시 활용이 가능하도록 컴포넌트로 구성된 도심지의 건물조각이며, 이를 활용하여 Fig. 2와 같은 야간 도심환경을 구축할 수 있다.
Fig. 1. Building components
Fig. 2. Nighttime urban environment
시외지의 외부환경을 구축하기 위해 Fig. 3과 같은 컴 포넌트를 활용하여 폴리지 컴포넌트를 구축하였다.
Fig. 3. Tree and bushes components
이러한 폴리지 컴포넌트를 활용하여 Fig. 4와 같은 시 외지의 도로환경을 구축할 수 있다.
Fig. 4. Daytime Rural environment
가상환경 내의 다른 차량은 사용자와 상호작용이 가 능한 자율 주행 자동차여야 한다. 이를 위해 차량의 행동 알고리즘을 적용하여 자율주행 차량을 만들었으며, Fig.
5에서처럼 차량 모델 및 주행루트를 변경하여 활용할 수 있도록 컴포넌트로 구성 하였다.
Fig. 5. Autonomous vehicle simulation
날씨에서는 안개의 유무가 결정적인 인자로 도출되었다.
안개를 가상환경 내에서 구현하였으며, 이는 Exponential Height Fog의 강도와 거리비 등을 설정하여 Fig. 6과 같 이 고도에 따라 안개의 농도를 수정하도록 설정하였다.
Fig. 6. Foggy weather
주간과 야간에 대한 인자를 구축하기 위해 Directional light의 Visible을 수정하여 태양의 유무를 설정하였으며, 가로등 컴포넌트의 Spot light의 유무와 빌딩의 Reflection Environment설정 및 Smoothing을 통해 Fig. 7과 같은 야간 도심지의 배경을 설정할 수 있다.
Fig. 7. Nighttime light setting
2.2.2 차량환경
2017년 기준 승용차는 18,034,540대로 전체차량의 약 80%를 차지하고 있으며, 화물차는 3,540,323 대로 전체차 량의 약 15% 이상을 차지하고 있다[16]. 이에 따라 차종 을 승용차와 화물차로 설정하였다.
사전조사를 통해 추출한 주요 인자로 운전석 높이와 차량종류를 도출하였다. 이에 운전석 높이와 차량의 종 류를 만족하도록 승용차 운전자의 눈높이는 1m, 화물차 운전자의 눈높이를 1.5m로 설정하였다.
Fig. 8. Sedan & Truck’s outer shape
Fig. 8은 승용차와 트럭의 외부를 보여준다. 또한 Fig.
9는 차량 내부로, 시뮬레이션 진행 중 HMD에 투사되는 이미지이다. 내부의 휠과 속도계 등은 주행 중인 차량의 움직임에 맞춰 움직일 수 있도록 설계되었다.
Fig. 9. Sedan & Truck’s inner shape
2.3 주행 데이터 추출
데이터를 수집할 장비는 차량 주행용 Logitech Steering Wheel & Pedal & Shifter와 가상현실의 투사용 HTC Vive가 사용되었다. 위 장비들과 연동을 위하여 Unreal Engine 내부 소스코드 스크립팅 기능인 Blueprint 와 C++을 사용하여 API 및 연동 시스템을 구축하였다.
Fig. 10은 Logitech Driving Steering Wheel & Pedal 연 동 시스템의 일부이다.
도로안전 시설물에 대한 평가를 위해서는 사용자의 행동에 대한 분석이 필요하다. 이를 위해 수집해야하는 사용자 행동데이터를 Table 2와 같이 설정하였다.
이러한 데이터를 추출하기 위해 가상현실 내에서 수집 가능한 데이터를 아래와 Table 3와 같이 수집할 수 있는 데이터로 수정하였다. 이를 가공하여 차량환경과 연동하 여, 데이터를 수집할 수 있는 컴포넌트로 구축하였다.
Fig. 10. Blueprint of interlocking system
Data Explanation Number of lane
encroachment
Number of times the lane incursion section occurred during the entire running Frequency of Lane
encroachment
Number of times the lane incursion section per unit time occurred
Maximum of lane encroachment
distance
The largest lane encroachment distance (m) Average of lane
encroachment distance
The longest lane encroachment distance (m)
Lane encroachment distance
The distance travelled during each lane crossing (m)
Lane encroachment
driving time The time spent in each lane crossing (s)
Number of rapid deceleration
Number of times a rapid deceleration has occurred during the entire run.
Rapid deceleration : Sedan (14km/h*s), Truck (-8km/h*s)
Rapid deceleration Lowest rate of deceleration in each fast-rate (km/h * s)
Maximum of Rapid deceleration
Lowest rate of deceleration in all of the fast-discharge (km/h * s) Average of Rapid
deceleration
Average rate of deceleration in each fall-out area (km/h * s)
Number of sharp turn
Number of times a sudden turn has occurred during the driving
If the driving speed is greater than 30 km/h (passenger car) and 20 km/h (truck), the cumulative rotation angle is 60 ° to 120 ° within
3 second.
Maximum of angular velocity in curve
Highest rapid acceleration (°/s) in each abrupt rotation interval
Maximum of angular
velocity Fastest angle of all rapid rotations (° s) Average of angular
velocity
Average rapid speed in each rapid rotation interval (° s)
Table 2. List of user behavior data in virtual reality
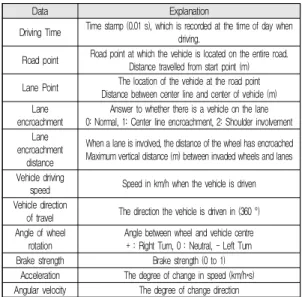
Data Explanation
Driving Time Time stamp (0.01 s), which is recorded at the time of day when driving.
Road point Road point at which the vehicle is located on the entire road.
Distance travelled from start point (m) Lane Point The location of the vehicle at the road point
Distance between center line and center of vehicle (m) Lane
encroachment
Answer to whether there is a vehicle on the lane 0: Normal, 1: Center line encroachment, 2: Shoulder involvement Lane
encroachment distance
When a lane is involved, the distance of the wheel has encroached Maximum vertical distance (m) between invaded wheels and lanes Vehicle driving
speed Speed in km/h when the vehicle is driven Vehicle direction
of travel The direction the vehicle is driven in (360 °) Angle of wheel
rotation
Angle between wheel and vehicle centre + : Right Turn, 0 : Neutral, - Left Turn Brake strength Brake strength (0 to 1)
Acceleration The degree of change in speed (km/h*s) Angular velocity The degree of change direction Table 3. List of collectable data in virtual reality
3. 샘플 시뮬레이션
3.1 샘플 시뮬레이션 환경
위의 컴포넌트들과 들을 활용하여 샘플 시뮬레이션을 만들어 사전실험을 진행해 보았다. 이를 통해 시뮬레이 션이 데이터를 적절히 수집하는지 확인하기 위한 실험을 진행하였다. Fig. 11은 구축한 모형의 조감도이다. 현실 감 있는 시뮬레이션을 구축하고자, 울산의 연암소류지 인근부터 구남교까지 약 5 km 구간 모형을 차용하여 시 뮬레이션 환경을 구축하였다.
Fig. 11. Birdeye view of the simulation environment
3.2 샘플 시뮬레이션 대상
샘플 시뮬레이션 대상은 발광 도로표지병을 선택하여 수행하였다. 발광 도로표지병으로는 성일솔레드의 매립 형 솔라 도로표지병을 선정하였다. 해당 도로표지병은 태양광 발전과 센서에 의한 LED가 발광하는 시스템이 도입된 도로표지병으로, 다양한 기술이 들어간 도로안전 시설로 볼 수 있다고 판단된다. 이에 따라 본 논문의 샘 플 시뮬레이션 대상으로 사용하였다. Fig. 12는 성일솔레 드의 솔라 표지병과 가상현실에 구현한 발광표지병의 모 델이다.
Fig. 12. Road sign model
도로표지병은 설치 간격에 따라 자재투입정도와 공사 의 크기가 천차만별이 될 수 있다[17]. 따라서 본 샘플 시
뮬레이션에서는 도로표지병의 설치 간격을 5m 간격과 10m 간격에 대하여 비교하는 평가 시뮬레이션을 제작하 여 실험하였다. Fig. 13는 샘플 시뮬레이션 가상환경 공 간의 한 장면이다.
Fig. 13. Sample simulation scenes
샘플 시뮬레이션은 대상 품목의 특성을 고려하여 주 행 환경을 설정하였다. 주행환경은 야간의 시외지역에서 운행하는 차량으로, 차량은 적고 맑은 날씨로 설정하여 진행하였다.
3.3 샘플 시뮬레이션 방법
샘플 시뮬레이션은 15명을 대상으로 실험동의서 및 인구통계학 정보를 수집한 후 실험을 진행하였다. 실험 은 Logitech Steering Wheel & Pedal & Shifter와 가상 현실의 투사용 HTC Vive가 사용되었다. 평균 약 4분 정 도의 주행 시뮬레이션 후 해당 시뮬레이션에 대한 평점 및 개선사항에 대한 설문을 진행하였다. Fig. 14.는 실험 장면을 나타낸다.
Fig. 14. Pilot experiment Scene
3.4 샘플 시뮬레이션 결과
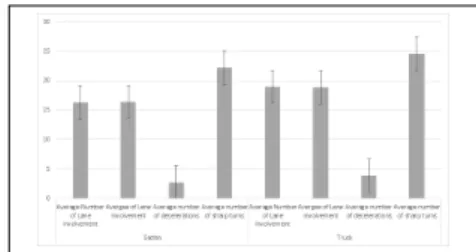
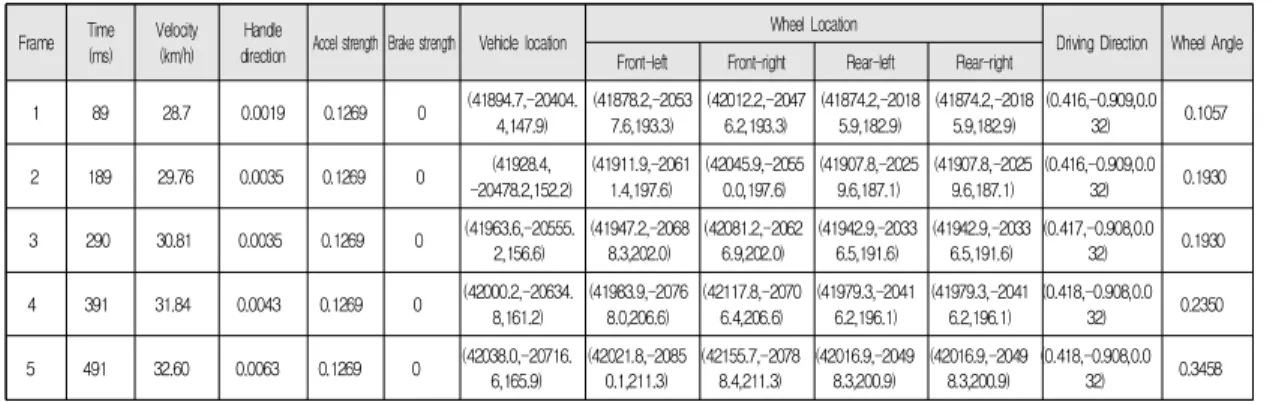
샘플 시뮬레이션의 운행 행위 데이터는 Table 4처럼 추출되었다. 이를 가공 및 분석하여, Table 5와 같은 운 행 행위에 대한 기본 데이터를 추출 할 수 있었다. 또한 여기서 도로표지병 간격에 따른 차선유도를 확인하기 위
하여 차선 침범 횟수 및 침범 한 거리에 대한 데이터를 수집하였다. 이는 Table 6에서 확인할 수 있다. 이를 통 해 5m 조건과 10m 조건에서 나타난 평균 차선 침범 횟 수와 거리를 비교하였다. Fig. 15는 이를 나타낸다. 5 m 조건에서 차선 침범은 약 15.06회, 침범거리는 약 15.93 m 이며, 10 m 조건에서 차선침범은 약 20.2회 침범거리 는 약 19.32 m 임을 확인하였다.
Fig. 15. Average of Lane Involvement by condition
또한 운전자의 눈높이에 따라 Sedan과 Truck으로 분 류하여 분석을 진행한 결과는 아래 Fig. 16에 나타난다.
이에 본 사전 실험에서는 도로표지병의 간격이 10m인 조건 보다 5m인 조건에서 차선유도를 잘할 것이라는 것 을 확인할 수 있었으며, 차종은 관계가 없음을 확인할 수 있었다. 또한 이를 통해 시뮬레이션이 적절한 데이터를 수집하고 있음을 확인할 수 있었다.
Fig. 16. Average of Involvement by car type
4. 결론
본 연구는 산업의 발전에 따라 나타나는 다양한 산업 기술이 융합된 도로안전시설물에 대한 평가 기준에 대한 탐색과 평가를 위한 가상현실 시뮬레이션 환경을 구축하 였다. 가상현실 시뮬레이션 구축은 도로환경과 차량환경 으로 나눠 구축하였다. 도로환경은 주변경관과 다른 차 량의 존재, 날씨, 시간대 등으로 나눠 구축하였다. 차량환
경은 승용차와 화물차를 기준으로 제작하였다. 이러한 도로안전시설물 평가에 주요 인자로 도출된 요소들은 컴 포넌트로 만들어 차후 다른 도로안전시설물에 대한 평가 를 위한 시뮬레이션 제작에도 활용할 수 있도록 하였다.
본 시뮬레이션의 타당성을 실험하기 위하여 사전 실 험을 진행하였다. 발광 도로표지병의 간격은 5m인 조건 이 10m인 조건보다 차선유도를 잘할 수 있다는 것을 확 인할 수 있었다. 이는 차후 새로운 기술이 접목된 새로운 도로안전시설물에 대한 평가기준에 대한 탐색을 위한 시 뮬레이션 작성에서도 활용 가능하다는 것을 확인할 수 있었다. 향후 가상환경 내 시뮬레이션 제작에 들어가는 인적, 물적 자원을 줄여 효율성을 높일수 있으며, 가상현
실 시뮬레이션에 대한 타당도에 대한 지지를 나타낸다.
본 시뮬레이션은 향후 새로운 기술이 접목된 도로안 전시설물에 대한 기준에 대한 평가 기준 확인 및 그 평가 를 위한 가상환경을 빠르게 구축할 수 있으며, 평가를 위 한 데이터 추출 또한 가능한 가상환경을 구축할 수 있다 는 점을 확인하였다.
본 시뮬레이션에서의 한계점은 새로운 기술이 접목된 도로안전시설물이 주어질 때, 각 안전 시설물마다의 평 가기준을 탐색하기 위한 조건을 찾아야 한다는 데 그 한 계가 있다. 각 도로안전시설물 마다의 특성에 맞는 실험 을 계획하는 조건이 필요하다. 또한 각 조건에 맞는 도로 안전시설물의 모델링 및 샘플 컴포넌트가 필요하다. 차
No. Time Road Point Road
Location Lane involvement
Lane involvement
distance
Vehicle Velocity
Driving Direction
Wheel Rotation
angle
Brake
strength Acceleration Angular velocity
1 0.05 0.000002 2.304976 0 0 0.000144 298.7982 0.058748 0 0.002880 0
2 0.149 0.000006 2.304976 0 0 0.000146 298.7982 0.058748 0 0.000020 0
3 0.25 0.000207 2.304982 0 0 0.007149 298.7982 0.058748 0 0.069337 0
4 0.354 0.000759 2.303138 0 0 0.019117 298.9264 0.058748 0 0.115077 1.232734
5 0.454 0.046342 2.298958 0 0 1.641005 298.9264 0.058748 0 16.21888 0
Table 5. Vehicle Operation Data
Frame Time (ms)
Velocity (km/h)
Handle
direction Accel strength Brake strength Vehicle location Wheel Location
Driving Direction Wheel Angle Front-left Front-right Rear-left Rear-right
1 89 28.7 0.0019 0.1269 0 (41894.7,-20404.
4,147.9)
(41878.2,-2053 7.6,193.3)
(42012.2,-2047 6.2,193.3)
(41874.2,-2018 5.9,182.9)
(41874.2,-2018 5.9,182.9)
(0.416,-0.909,0.0
32) 0.1057
2 189 29.76 0.0035 0.1269 0 (41928.4,
-20478.2,152.2)
(41911.9,-2061 1.4,197.6)
(42045.9,-2055 0.0,197.6)
(41907.8,-2025 9.6,187.1)
(41907.8,-2025 9.6,187.1)
(0.416,-0.909,0.0
32) 0.1930
3 290 30.81 0.0035 0.1269 0 (41963.6,-20555.
2,156.6)
(41947.2,-2068 8.3,202.0)
(42081.2,-2062 6.9,202.0)
(41942.9,-2033 6.5,191.6)
(41942.9,-2033 6.5,191.6)
(0.417,-0.908,0.0
32) 0.1930
4 391 31.84 0.0043 0.1269 0 (42000.2,-20634.
8,161.2)
(41983.9,-2076 8.0,206.6)
(42117.8,-2070 6.4,206.6)
(41979.3,-2041 6.2,196.1)
(41979.3,-2041 6.2,196.1)
(0.418,-0.908,0.0
32) 0.2350
5 491 32.60 0.0063 0.1269 0 (42038.0,-20716.
6,165.9)
(42021.8,-2085 0.1,211.3)
(42155.7,-2078 8.4,211.3)
(42016.9,-2049 8.3,200.9)
(42016.9,-2049 8.3,200.9)
(0.418,-0.908,0.0
32) 0.3458
Table 4. Vehicle Operation Data
Lane Involvement Area
No. Start Time (s) End Time (s) Max involvement
distance (m)
Average involvement distance (m)
Driving distance during
involvement (m) involvement time (S)
1 55.557 56.049 4.074858 3.580778 4.484222 0.4920006
2 59.254 60.55 4.360063 3.645597 8.267395 1.295998
3 65.252 65.453 3.53778 3.40942 1.223877 0.201004
4 87.558 88.955 3.286279 3.270681 9.091431 1.397003
5 103.252 105.251 4.835596 3.873302 14.14276 1.999001
Table 6. Lane Involvement Area List
후에는 다른 도로시설물에 대한 모델링 및 샘플 컴포넌 트를 추가하여 다양한 환경에 대한 시뮬레이션이 가능하 도록 할 수 있을 것이다.
REFERENCES
[1] S. Y. Son & H. W. Sin. (1998). Classification of traffic accident severity classification using data mining.
Proceedings of the Fall Conference of the Korean Society for Industrial Technology, 542-549.
[2] H. K. Sung & K. S. Chong. (2017). An Study on Securing the Stability of Road Sign through Analysis of wind data according to types of measurement. The
Korea Academia-Industrial cooperation Society, 18(2),
77-84.[3] G. I. Kim, Y. C. Kim & J. K. Lee. (2016). An Efficiency Authentication Security Mechanism of VANET in Highway, Journal of Convergence for Information
Technology, 6(3), 57-64.
[4] J. J. Park, D. N. Kim & Y. J. Park. (2017). The Introduction and Activation Plan of Driving Simulator Experiment Facility. KSCE 2017 Convention, 1848-1849.
[5] M. H. Kim. (2017). The Effect of Performing Leader's Role on Academic Achievement and Satisfaction in Small Group Collaborative Learning in Virtual Reality.
Journal of Digital Convergence, 15(11), 67-76.
[6] S. Jayarams, J. Vance, R. Gadh, U. Jayaram & H.
Srinivasan. (2001). Assessment of VR technology and its applications to engineering problems.
Journal of Computing and Information Science in Engineering, 1(1), 72-82.
[7] J. H. Lee. (2018). A Study on the Educational Use of Augmented Reality Based Mobile Education Content - Case Analysis of Mobile Augmented Reality Application for Education. Journal of the korean society design
culture, 24(1), 569-585.
[8] J. S. Kim. (2016). The Design and Development of Healing Depression Convergence Content using Movement of Thought, HMD, Leap Motion, Color and Music Therapy. Journal of the Korea Convergence
Society, 7(3), 45-51.
[9] K. J. Lee, J. H. Woo & H. S. Kim. (2018). Extensible Evaluation and Analysis System for Virtual Training using Experiential Knowledge of Expert. KIISE
Transactions on Computing Practices, 24(3), 122-128.
[10] N. E. Kim, Y. L. Kim, S. C. Moon, D. H. Lee, H. J. Lim,
E. K. Jang, J. E. Hung & J. H. Kang. (2018). The Effect of Dynamic Balance on Cyber Motion Sickness of Full Immersion Virtual Reality. Journal of Convergence for
Information Technology, 8(1), 131-138.
[11] C. H. Lee, Y. G. Bae & S. S. Kim. (2003). Development of APC based Low Cost Virtual Reality Driving Simulator for Driving Practice. Proceedings of the
Korean Society of Mechanical Engineers, 1097-1102.
[12] W. H. Cheon & H. J. Cho. (2006). Development of methodology for Evaluating Road Safety. Korean
Society of Transportation, 52, 156-161.
[13] D. J. Yang, S. K. Park & Y. H. Uhm. (2016). Impact of Virtual Reality Based Neuromuscular Postural Control Fusion Training on Balance Ability and Jump Performance of Soccer Players with Functional Ankle Instability, Journal of Digital Convergence, 14(11), 357-367.
[14] J. M. Kim, K. S. Noh & S. K. Lee. (2007). Application of Driving Simulator to Evaluate Road Facility. Korean
Society of Civil Engineers Conference, 1804-1807.
[15] M. J. Lee. (2013). A Study on Game Production Education through Recent Trend Analysis of 3D Game Engine, Journal of the Korea Convergence Society, 4(1), 15-20.
[16] Ministry of Land, Infrastructure And Transport Statistics System. (2016). Motor Vehicle Registration by Year.
[17] D. K. Kim, Y. S. Kim & G. S. Noh. (2000). A Study on the Guidelines for Installation of Raised Pavement Marker. Proceedings of the KOR-KST Conference.
38(0), 455-460.
채 병 훈(Chae, Byeong Hoon) [학생회원]
▪2017년 2월 : 강원대학교 심리학과 (문학사)
▪2017년 2월 : 강원대학교 데이터분 석(공학 학사)
▪2017년 3월 ~ 현재 : 아주대학교 공과대학 산업공학과 석사과정
▪관심분야 : 융합기술연구, 데이터분석, 가상현실(VR)
▪E-Mail : [email protected]
채 호 근(Chae, Ho Keun) [정회원]
▪2016년 9월 ~ 현재 : 아주대학교 공과대학 산업공학과 박사과정
▪2006년 9월 ~ 현재 : SK(주)C&C DT Proposal Consultant
▪2000년 9월 ~ 2006년 8월 : TelSK 전략사업개발팀장
▪1995년 1월 ~ 2000년 8월 : SK해운 MIS Architect
▪관심분야 : 융합기술연구, AI, 가상현실(VR)
▪E-Mail : [email protected]
이 주 연(Lee, Joo Yeoun) [종신회원]
▪2004년 2월 : 인하대학교 경영대학 (경영학박사)
▪2014년 9월 ~ 현재 : 아주대학교 공과대학 산업공학과 교수
▪2016년 7월 ~ 현재 : 한국빅데이 터서비스학회 회장
▪2015년 2월 ~ 2018년 1월 : 산업통상자원부 산업융합 촉진 옴부즈만
▪2007년 7월 ~ 2011년 6월 : 한국산업정보학회 회장
▪2011년 12월 ~ 2014년 3월 : 포스코 ICT 그린사업부 문장, 컨버전스사업본부장(전무)
▪2005년 2월 ~ 2011년 11월 : SK C&C 전략마케팅본 부장, 공공전략사업본부장(상무)
▪1999년 12월 ~ 2005년 1월 : Oracle Stratigic Solution 실장, Public Service Industry실장, AP Architecture실 장 (Director)
▪관심분야 : 융합기술연구, BI, 서비타이제이션
▪E-Mail : [email protected]