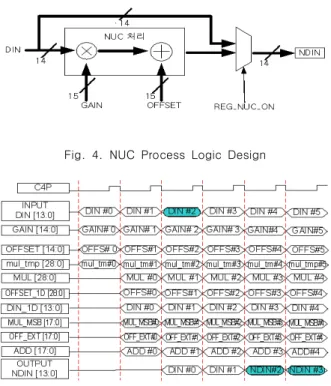
IR Image Processing IP Design, Implementation and Verification For SoC Design
1)
전체 글
1)
수치
관련 문서
Basic aspects of AUTOSAR architecture and methodology Safety mechanisms supported by AUTOSAR.. Technical safety concepts supported by AUTOSAR Relationship to ISO
Cowley (1969): for the same lenses, apertures and system dimension the image contrast must be the same for CTEM and STEM..
Sluyter(Eds). Emtional development and emtional intelligence:.. implications for educators. Social information processing in aggressive and depressed
The thickness of the maxillary sinus lateral wall according to tooth site and measurement level was measured by using image-processing software and its histologic
Shear and elongational viscosity Normal
이를 달성하기 위해서는 MBP를 줄이거나 MUF 불확도 에 미치는 영향이 높은 U/TRU product에서의 계통 오 차(systematic error)를 0.5% 이하로 줄여야 함.
For the system development, data collection using Compact Nuclear Simulator, data pre-processing, integrated abnormal diagnosis algorithm, and explanation
