1
1
< 학술논문 >
스마트 시트벨트 시스템용 과하중 방지 클러치의 성능 해석
허 욱† · 김 석현* · 박두연**· 김 정한*** · 이 연복*** · 김 도식*** · 최 인수***
Performance analysis on the anti-over load clutch for a smart seat belt system
Heo Wook, Kim Seock-Hyun, Park Doo-Yeon, Kim Jung-Han, Lee Youn-Bok, Kim Do- Shik, Choi In-Su
Key Words : Seat belt(시트벨트), Motorized retractor(모터구동형 리트랙터), Anti-overload clutch(과 하중 방지 클러치)
Abstract
In the motorized retractor of the smart seat belt system, anti-overload clutch is a very important element to prevent the excessive belt tensional force. Anti-overload clutch is the essential device to protect drivers from chest damage by the excessive belt tension. It generates slipping motion under excessive webbing moment and the belt tensional force is limited below critical value. In this study, slipping mechanism in the anti- overload clutch is investigated by analysis and experiment. On the prototype model, finite element analysis is performed to identify the slipping condition and to determine the critical load. Analysis result is compared with the experimental result and the validity of the analysis model is verified. The purpose of the study is to provide the analytical background for the systematic design of the anti-overload clutch mechanism
1. 서 론
승용차의 안전 기준이 강화되고 소비자의 요구 수준이 까다로워지면서 보다 높은 안전 성능을 보장하는 시트벨트 시스템의 필요성이 커지고 있다. 최근에는 탑승자간의 이격을 제거하고 탑승자를 구속하는 기본적인 기능에서 나아가, 시트의 경사각을 모니터링하는 기능, 충돌의 예측 및 예인장 (pre-tensioning)을 통한 탑승자 정위치 기능, 충돌 시 탑승자 제원을 고려한 적절한 장력을 조절 기능 등을 갖춘, 소위 스마트 시트벨트 시스템의 필요성이 높아지고 있다.
이러한 기술은 모터 구동형 리트랙터의 사용과
함께 이미 상용화되어 고급 승용차의 경쟁력의 척도가 되고 있으며, 국내에서도 전문 시트벨트 생산업체를 중심으로 기술 개발이 활발히 진행 중이다. 본 연구에서 다루는 모터 구동형 리트랙터(Motorized Retractor)용 과하중 방지 클러치(Anti-overload clutch)는 기계적 문제나 회로상의 결함으로 모터에 과전류가 공급되어 강한 토크가 발생할 때, 웨빙(Webbing)에 과도한 장력이 발생하지 않도록 회전력 전달을 제한하는 기능을 수행한다. 충돌 가능성을 예측하여 벨트를 예인장하는 경우, 비정상적인 착석자세(Out of Position)에 있는 탑승객은 웨빙의 급격한 가속에 의해 신체에 큰 부상을 입을 수 있으며, 오히려 탑승객의 안전을 저해할 수가 있다. 현재 모터 구동형 리트랙터의 예인장력은 법적으로 명시하고 있지는 않지만, 여러 연구결과에 통해 약 150N~250N 의 장력으로 예인장할 것을 권장하고 있다(1,2).
과하중방지 클러치는 그 구조상 반복적인 작동
† 델파이코리아㈜ 기술연구소 연구원 E-mail : [email protected] TEL : (033)730-2220
* 강원대학교 메카트로닉스공학과 교수, 공학박사
** 델파이코리아㈜ 기술연구소장
*** 델파이코리아㈜ 기술연구소 연구원 대한기계학회 2008년도 추계학술대회 논문집
850
2
2 이 요구된다. 따라서 클러치 부품의 파손은 탑승 객의 안전을 위협하는 요소로 작용할 수 있다. 따 라서 과하중 방지 클러치 시스템의 작동 메커니즘 을 효율화시키고 작동 시 부품에 발생하는 응력 및 변형을 검토하여 요구되는 내구성을 보장하는 설계가 필요하다(3).
본 연구에서는 기존 해외 업체에 의하여 개발된 모델을 대상으로 수행한 연구 데이터를 바탕으로, 국내업체가 개발중인 모델의 성능을 검토한다. 전 산구조해석을 통한 과하중 방지 클러치의 작동조 건 및 성능 변화를 예측하고 시작품 시험을 통하 여 해석결과를 검증한다. 해석 및 설계의 신뢰도 를 검증하여, 향후 모터 구동형 리트랙터의 과하 중 방지 클러치 개발과정에서의 설계 기간을 단축 시키고, 문제 발생시 신속한 대책을 수립할 수 있 도록 해석 및 설계기반을 구축하는 것이 본 연구 의 목적이다. 본 연구를 통하여 개발된 설계기술 은 다양한 모터구동형 리트랙터의 작동 요구조건 을 만족시키는 과하중 방지 클러치의 최적 모델을 설계하는 데에 활용될 것이다.
2. 과하중 방지 클러치의 구조
Fig. 1 은 국내업체에서 1 차로 설계한 모터구동 형 리트랙터의 과하중 방지 클러치의 구조를 보인 다. 모터 축에 연결된 선기어(Sun gear)가 반시계 방향으로 회전하면서 종동 기어와 선기어 사이의 스프링이 변형하게 된다. 회전력이 한계치를 초과 하면 스프링과 선기어 사이에 미끄럼이 발생하면 서, 선기어의 전달 회전력이 제한된다. 모터구동형 리트랙터는 수시로 발생하는 충돌 가능성에 대처 하여야 하므로 지속적인 반복작동이 요구된다. 과 하중 방지 클러치의 내구 조건으로, 500 회의 반복 적인 과하중 발생 이 후에도 정상적으로 작동해야 하고, 웨빙 인장력 역시 최초와 동일한 크기를 유 지할 수 있어야 한다.
Fig. 1 Structure of anti-over load clutch.
3. 작동 조건 해석 3.1 해석 모델
선 기어에 전달되는 회전력에 따른 스프링 변형 해석에, 3D CAD 를 통해 설계된 형상(Geometry)를 전산구조해석 프로그램인 Abaqus 에 입력시켜 해 석하였다. 연구용 모터 구동형 리트랙터에는 정격 전압 12V 에 17A 의 전원이 공급되며, 이 때 모터 축 회전에 의한 종동 기어(Driven gear)의 회전속도 는 1656rpm 로 확인되었다.
먼저, 1656rpm 의 회전 속도하에서 스프링이 전 달하는 최대 회전력을 검토한다. 현재 개발중인 모터구동형 리트랙터에서 사용하는 예인장력의 범 위는 150~200N 에서 설정되어 있고, 250N 을 초과 하지 않도록 하는 것을 목표로 한다. 클러치의 제 원을 고려할 때, 200N 의 웨빙 인장력은 허용 토크 1100N·mm에 해당하고, 250N 의 장력 제한치에 해 당하는 최대허용토크는 1375N·mm 이다.
3.2 해석 결과
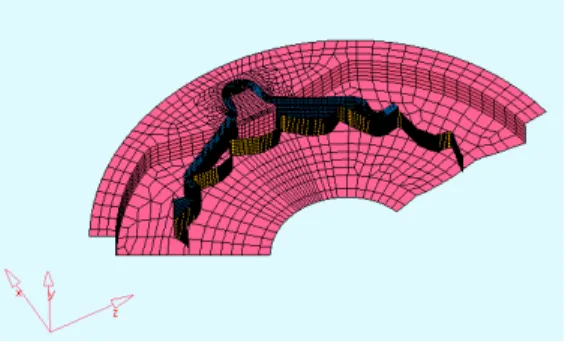
먼저 회전력을 구하는 해석을 수행하였다. 클러 치 구조의 대칭성을 고려하여, Fig. 2 과 같이 1/3 모델에 대하여 해석하였다.
Fig. 2 Finite element analysis model.
선 기어의 토크 해석 결과를 Fig. 3 에 표시한다.
회전각 10o 부근에서 스프링이 기어 산을 넘는 순 간 발생하는 최대 토크는 1380N·mm 로 해석되었 다. 이는 251N 의 인장력에 해당하므로, 현 모델의 장력 허용치는 목표치에 접근하는 것으로 평가된 다.
Fig. 4 는 스프링의 응력해석 및 변형해석 결과 를 보인다. 스프링이 기어 산 끝에 올랐을 때, 스 프링의 응력 상태 및 변형이 최대가 된다. Fig. 4a) 의 응력상태에서 힌지(Hinge) 부근에 최대 응력이 발생하는 것으로 예측되었다. 따라서 반복 작동 시, 스프링 힌지 부근에서 내구성이 문제될 가능 성이 예측된다. b)의 변형에서도 유사한 위치에서
Spring
Sun Gear Driven Gear
851
3
3 최대 변형을 보이는 바, 내구성을 검토할 필요가 있다.
0 200 400 600 800 1000 1200 1400 1600
0 2 4 6 8 10 12 14 16
Angle (Theta)
Moment of sun gear about Y (N-mm)
Fig. 3 Torque vs. rotation angle.
a) Stress distribution
b) Strain distribution Fig. 4 Finite element analysis results.
4. 시험
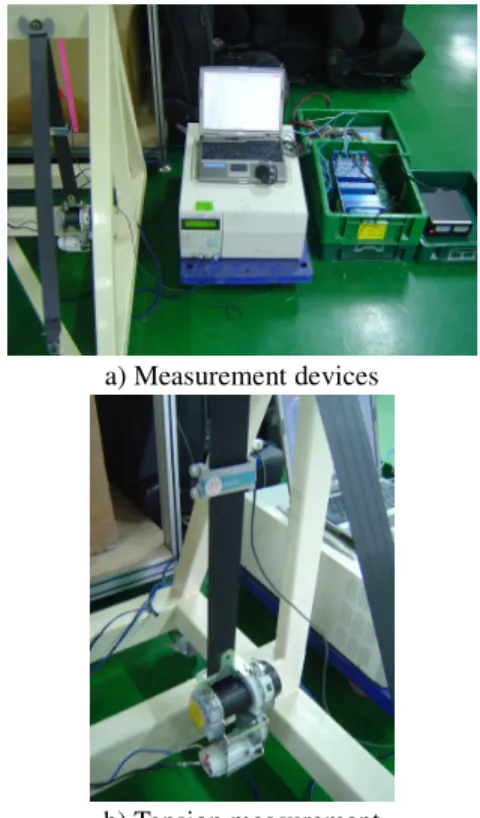
웨빙 장력의 측정 시스템은 Fig. 5 에서와 같이, 장력 측정용 로드셀과 전압증폭기, 리트랙터 전원 공급장치, 데이터 처리용 노트북으로 구성되어 있 다. 전압을 12V 로 고정하고, 전류를 17A 에서 1A 씩 증가시켜 회전력을 높이면서, 웨빙 장력의 변 화와 미끄럼 발생 여부를 확인하였다. 공급전류 증가에 따라 회전력이 증가하면서, 29A 에서 과하 중 방지 클러치가 작동(미끄러짐)하기 시작하였다.
Fig.6 은 측정결과를 보인다. 스프링이 미끄러지는 순간의 웨빙 장력은 약 230N 으로 확인되었다. 또 한 150N 의 예인장력을 발생시킨다. 230N 은 안전
을 고려하여 250N 아래로 장력을 제한해야 하는 현 상황을 고려할 때, 목표치를 충분히 만족시킨 다고 볼 수 있다.
a) Measurement devices
b) Tension measurement
Fig. 5 Experimental set up for belt tensional force.
Fig. 6 Belt tension at undue current supply (29[A])
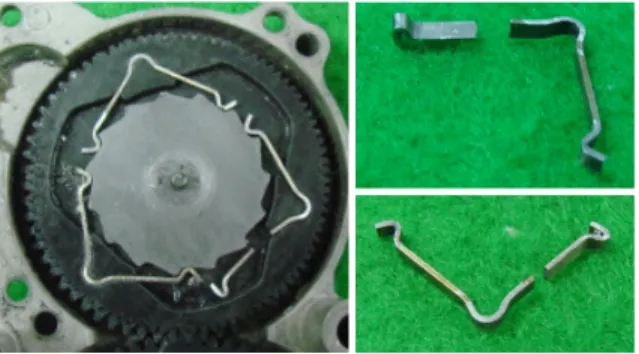
시험에서는 장력이 약 230N 으로 해석치보다 다 소 낮게 발생하였는데, 이는 해석상의 오차라기보 다는 리트랙터 구동시 발생하는 요소간 마찰에 기 인하는 것으로 보인다. 실제로, 시험 후 시제품을 분해해본 결과, Fig. 7 에서와 같이 클러치가 결합 되는 부분을 덮는 커버가 심하게 마모되어 있음을 확인할 수 있었다. 즉, 클러치 회전시 변형이 큰 스프링 끝 단이 커버와 접촉하며 커버의 마모를
852
4
4 일으키면서 회전력의 일부를 잠식하는 것으로 보 인다.
Fig. 7 Abrasion in the clutch.
시제품에서 사용한 스프링은 과하중 방지 기능 을 약 150 회 수행한 후 파괴되었다. 스프링의 피 로 파괴 부위를 확인한 결과 Fig. 8 과 같이, 해석 에서 최대 응력 및 변형이 발생하는 것으로 예측 된 스프링 팔 힌지 부근으로 확인되었다.
Fig. 8 fatigue fracture in the spring.
5. 결 론
모터구동형 리트랙터의 과하중 방지 클러치의 작동 조건을 전산구조해석과 시제품의 시험을 통 해 확인하였다. 선행연구에 이어 개발중인 시제품 을 대상으로 유한요소해석과 장력 측정시험을 수 행한 결과 다음의 결론을 얻었다.
① 유한요소해석을 통하여 예측한 클러치의 작 동 조건은 요구되는 목표치에 거의 근접하 였다.
② 다만, 최대 허용 장력 예측치 250N 은 측정 치 230N 을 다소 초과한다. 이는 해석에서 고려하기 어려운 부품간의 마찰에 의한 것 으로 향후 요소간 불필요한 마찰을 줄이는 노력이 필요하다.
③ 현 시제품은 요구치 500 회에 훨씬 못 미치 는 150 회 반복 작동 시, 스프링의 피로 파
괴가 발생하였다. 파단 위치는 미끄럼이 발 생하는 상태에서 응력과 변형이 집중되는 부분으로, 유한요소해석으로 예측한 결과와 거의 일치하였다..
후 기
본 연구는 교육과학기술부와 한국산업기술재단의 지역혁신인력양성사업으로 수행된 연구결과임.
.
참고문헌
(1) Craig A. Good, David C. Viano, Janet L. Ronsky, 2008, “Motorized Shoulder Belt Tensioning - Modeling and Performance for a Diverse Occupant”, SAE, 2008-01-0515.
(2) Craig A. Good, David C. Viano, Janet L. Ronsky, 2008, “The Hybrid III Dummy Family Subject to Loading by a Motorized Shoulder Belt Tensioner”, SAE, 2008-01-0516
(3) Mori, S., Komiya, H., Kohide, T., 2003, “Webbing Retractor and Clutch Mechanism”, Japanese Patent Office, JP-P-2002-00203140
(4) J. Y. Forêt-Bruno, X. Trosseille, J. Y. Le Coz, F.
Bendjellal, C. Steyer, 1998, “Thoracic Injury Risk in Frontal Car Crashes with Occupant Restrained with Belt Load Limiter” , Seat Belts: The Development of An Essential Safety Feature, No. 983166
(5) J. Y. Forêt-Bruno, F. Brun-Cassan, C. Brigout, C.
Tarrière, 1989, “Thoracic Deflection of Hybrid Ⅲ Dummy; Dummy Response for Simulation of Real Accidents”, 12th International Technical Conference on ESV Conference.
(6) J. Y. Forêt-Bruno, X. Trosseille, Y. Page, J. F. Huère J. Y. Le Coz, F. Bendjellal, A. Diboine, T. Phalempin, D. Villeforceix, P. Baudrit, H. Guillemot and J. C.
Coltat, 2001, “Comparison of Thoracic Injury Risk in Frontal Car Crashes Occupant Restrained without Belt Load Limiters and Those Restrained with 6kN and 4kN belt Load Limiters”, Stapp Car Crash Journal, Vol. 45, pp.375~394.
(7) Tak, T. O., Park, J. S., Kuk, M. G., Kim, D. H., Shin, S. E., Chio, S., 2006, “Driving Mechanism Design of a Motorized Seat Belt Retractor”, Journal of Industrial Technology, Vol. 26 A, pp. 55~61.
(8) Tokai Rika co. Ltd., http://www.tokai- rika.co.jp/en/index.html
853