Copyright
Ⓒ2014 KSAE / 128-11 pISSN 1225-6382 / eISSN 2234-0149
DOI http://dx.doi.org/10.7467/KSAE.2014.22.2.076Transactions of KSAE, Vol. 22, No. 2, pp.76-82 (2014)
전륜 인라인 후륜 인휠 모터 적용 전기자동차의 최적 동력 분배
김 정 민*
안동대학교 기계자동차공학과
Optimal Power Distribution for an Electric Vehicle with Front In-line Rear In-wheel Motors
Jeongmin Kim*
Department of Mechanical & Automotive Engineering, Andong National University, Gyeongbuk 760-749, Korea (Received 2 July 2013 / Revised 15 July 2013 / Accepted 18 July 2013)
Abstract : In this paper, an optimal power distribution algorithm is proposed for the small electric vehicle with front in-line and rear in-wheel motors. First, it is assumed that the vehicle driving torque and velocity are given conditions.
And, an optimal problem is defined that finding the front and rear motor torques which minimizes the battery power.
From the above optimization problem, the optimized front-rear motor torque distribution map is obtained. And, the vehicle simulations are performed to verify the performance of the optimal power distribution algorithm which is proposed in this study. The simulations are performed based on the federal urban driving schedule for two cases which are constant ratio power distribution, and optimal power distribution. From the simulation results, it is found that the optimal power distribution shows the 6.3% smaller battery energy consumption than the constant ratio power distribution.
Key words : Electric vehicle(전기자동차), In-line motor(인라인모터), In-wheel motor(인휠모터), Vehicle simulation (차량 시뮬레이션), Power distribution(동력분배)
1. 서 론1)
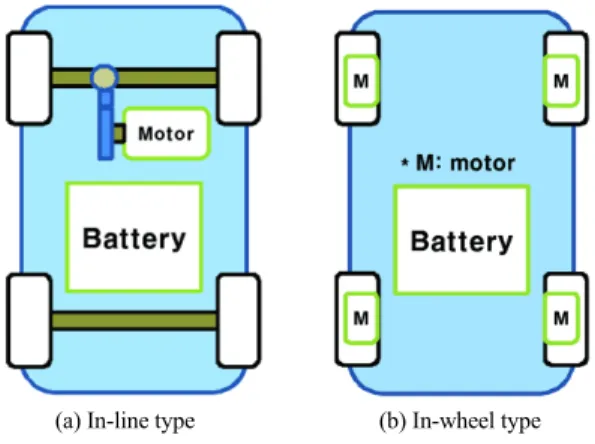
환경오염 및 에너지 문제에 따라 주행 중 배기가 스를 전혀 배출하지 않는 전기자동차에 대한 관심 이 증가하고 있다. 이에 따라 최근 공공기관 및 카쉐 어링(car sharing) 사업 등을 중심으로 전기자동차의 보급이 확산되고 있다. Fig. 1은 전기자동차의 대표 적인 구조 2개를 도시한 것이다. Fig. 1(a)는 최근 보 급되고 있는 전기자동차의 전형적인 구조이다.1,2) 한 개의 전기모터가 전륜의 구동축에 연결되어 차 량을 구동한다. 여기서 구동축은 직선(line)으로 볼 수 있고, 전기모터가 이 구동축을 통하여 동력을 전 달하기 때문에, 이와 같은 구조를 인라인(in-line) 구
*
Corresponding author, E-mail: [email protected]
조라고 부른다. 이 구조는 기존의 내연기관과 유사 한 구조를 보이기 때문에, 차량 무게 배분 및 내부 구조 설계의 자유도가 부족한 단점이 있다. 이에 전 기모터를 각 구동 휠에 장착한 인휠(in-wheel) 모터 가 제안되었다.3,4) Fig. 1(b)는 이 인휠 모터가 장착된 전기자동차를 도시한 것이다. 인휠 모터가 휠 안에 장착되어 있기 때문에 인휠(in-wheel)이라고 부르 며, 인휠 모터가 휠을 직접 구동하므로 써 향상된 동 력전달 효율과 증가된 차량 공간을 확보할 수 있 다.5) 또한, 전후좌우 휠의 구동 및 제동력을 독립 제 어함으로써, 향상된 승차감과 선회시 차량 안정성 을 확보할 수 있다.6,7) 인휠 모터가 후륜에 장착되어 선회시 차량 안정성 확보 제어를 수행 하였을 경우, 기존 차량의 차량 안정성 제어 대비 20%에서 40%
전륜 인라인 후륜 인휠 모터 적용 전기자동차의 최적 동력 분배
(a) In-line type (b) In-wheel type
Fig. 1 Configuration of electric vehicle향상된 성능을 확보할 수 있다고 보고된 바 있다.8) 하지만, 인휠 전기모터가 장착된 전기자동차는 2 개 이상의 전기모터를 구동원으로 사용하기 때문 에, 각 모터의 동력을 배분하는 제어로직이 요구된 다. 특히, 좌우 모터의 동력 배분은 차량의 선회가 유발되기 때문에, 전후륜의 동력배분을 통한 효율 향상 연구가 진행된 바 있다.9,10) 하지만, 기존 연구 는 큰 부하에서 전후륜 모터를 모두 사용하고, 작은 부하에서는 전륜 모터만 사용하는 기초적인 방법이 었다. 이에 이 연구에서는, 주행 상황에 따라 최적화 된 전후륜 구동력 분배 로직을 개발하여 전기자동 차의 에너지 소비를 최소화 하고, 시뮬레이션을 통 하여 그 성능을 검증하고자 한다.
2. 연구대상 차량
최근 개발된 인휠모터의 경우, 전후륜에 모두 장 착하기 보다는 후륜에 장착하여 전기자동차의 동력 을 보조하고, 우수한 차량의 동적 거동 성능을 확보 하는 방향으로 진행되고 있다.3,4) 이에 이 연구에서 는 전륜은 기존 전기자동차와 동일한 인라인 모터 가 장착되고, 후륜에는 인휠모터가 장착된 전기자 동차를 대상으로 연구를 진행하고자 한다. 또한, 인 라인 모터의 경우 모터 크기에 대한 제한이 비교적 작기 때문에, 영구자석이 사용되지 않고 코일로 구 성된 유도전동기가 주로 사용된다. 인휠 모터의 경 우 작은 크기의 전기모터를 사용하여야 하기 때문 에 BLDC(blushless direct current) 모터가 사용된다.
전기모터의 종류가 다르면, 그에 따른 전기모터의
Fig. 2 Configuration of electric vehicle with front in-line rear in-wheel motors
Table 1 Parameters used in this study Front in-line type electric motor
항목 제원 단위
Elec. motor type AC synchronous - Max. power 50/2,860-9,800rpm kW
Max. torque 167/0-2,860rpm Nm
Max. RPM 10,000 -
Final drive ratio 8 -
Rear in-wheel type electric motor (Each)
항목 제원 단위
Elec. motor type BLDC -
Max. power 16/1,230-4,800rpm kW
Max. torque 125/0-1,230rpm Nm
Max. RPM 5,000 -
Final drive ratio 4 -
Battery
Type Lithium ion -
Voltage 330 V
Capacity 16.4 kWh
Tire
Tyre size 175/60R14 -
Weights & Dimensions
Kerb weight 1,200 kg
Cd 0.29 -
Frontal area 2.0 m2
효율 특성이 다르다.11) 이와 같이 다른 두 종류의 모 터가 사용된 전기자동차 구조일수록 동력분배 제어 로직이 더욱 중요하다. 때문에, 이 또한 전륜 인라인 모터, 후륜 인휠모터가 장착된 전기자동차를 대상 으로 연구를 진행하는 추가적인 이유이다. Fig. 2는 이에 따른 연구대상 차량의 구조를 도시한 것이다.
Table 1은 연구 대상 전기자동차의 제원을 정리한
Jeongmin Kim
(a) In-line type
(b) In-wheel type
Fig. 3 Characteristic curve of two different motors
것이다. 전륜에는 50kW급 인라인 타입 유도 전동기 가, 후륜 각 휠에는 16kW급 인휠 타입 BLDC 모터가 장착되었다. 배터리는 330 볼트 리튬이온 배터리이 며, 차량 중량은 1200kg 급 소형 차량이다. 이에 따 른 각 전후륜 전기모터의 특성 선도를 Fig. 3에 도시 하였다. Fig. 3(a)는 전륜에 적용된 유도 전동기의 최 대토크 및 효율 선도이다. 5,000RPM 이상의 고속에 서 유도전동기의 효율이 우수하다. Fig. 3(b)는 후륜 에 적용된 BLDC 모터의 최대토크 및 효율 선도이 다. 2,000RPM 부근의 중속에서 BLDC 모터의 효율 이 우수하며, 전륜 인라인 모터와 효율 선도의 특성 이 상이한 것을 볼 수 있다.
3. 전후륜 동력 분배 최적화 3.1 차량 토크, 속도 및 동력 관계식 Fig. 4는 차량에서 발생하는 차량 주행 토크, 휠토 크, 속도 등을 도시한 것이다. 차량의 토크 및 속도 관계식을 구하고, 이 값들을 이용하여 전후륜 모터 의 효율과 배터리 동력을 계산한다.
Fig. 4 Characteristic curve of two different motors
토크 관계식
운전자의 가속 또는 제동 페달에 따라 차량 주행 토크 Tv는 결정된다. 차량 주행 토크는 각 휠의 구동 토크의 합으로 다음과 같이 표현할 수 있다.
(1)여기서, Tf는 전륜 휠 토크, Tr는 후륜 휠 토크이다.
전륜에는 인라인 모터, 후륜엔 인휠 모터 2개가 적 용되는 사항을 고려하여, 각 전후륜 휠 토크는 다음 과 같이 계산할 수 있다.
_ (2)
⋅
_ (3) 여기서, Tm_f는 전륜 인라인 모터 토크, Nf는 전륜 인 라인 모터 최종감속비, Tm_r은 후륜 인휠 모터 토크,N
r은 후륜 인휠 모터 최종감속비이다. 후륜 휠토크 는 2개의 인휠모터 토크에 의하여 구현되기 때문에, 식 (3)에서 Tr은 Tm_r과 Nr의 곱의 2배이다.속도 관계식
각 휠의 회전 속도는 다음과 같이 계산할 수 있다.
(4)
여기서, ωf는 전륜 휠 회전속도, ωr은 후륜 휠 회전속 도 , V 는 차량 속도, r 은 휠 반경 이다. 각 휠의 회전 속도를 알면, 다음과 같이 전륜 인라인 모터 및 후륜 인휠 모터의 회전 속도를 계산 할 수 있다.
_
(5)
_
(6)
여기서, ωm_f는 전륜 인라인 모터 회전속도, ωm_r은 후륜 인휠 모터 회전속도 이다.
Optimal Power Distribution for an Electric Vehicle with Front In-line Rear In-wheel Motors
동력 관계식
차량 주행 동력 Pv는 전후륜 휠의 동력 합으로 다 음과 같이 계산할 수 있다.
(7) 식 (7)에 식 (2)~(6)을 대입하면, 차량 주행 동력 Pv를 다음과 같이 인라인 및 인휠 모터의 토크와 차량 속도로 표현 할 수 있다.
_ ⋅
_
(8)
인라인 모터 및 인휠 모터의 토크와 속도를 통하여 다음과 같이 배터리 동력 Pb를 계산할 수 있다.
_
_
_
_
≥
_
_
_
_
(9)
여기서, ηf는 전륜 인라인 모터 효율, ηr은 후륜 인휠 모터 효율이다. 이 효율들은 각 모터의 토크와 속도 를 알면 Fig. 3의 선도를 통하여 구할 수 있으며, 0부 터 1 사이의 값을 갖는다. 차량 주행 동력 Pv가 0보 다 큰 경우 각 모터는 구동을 수행하며, 효율 때문에 각 모터의 입력 동력인 배터리 동력은 각 모터들의 동력 합보다 커야한다. 때문에, 각 모터 동력을 각 모터 효율로 나누어 준다. 차량 주행 동력 Pv가 0보 다 작은 경우 각 모터는 발전을 수행하며, 이 경우 배터리 동력의 크기는 각 모터들의 동력 합의 크기 보다 작아야한다. 때문에, 각 모터 동력에 각 모터 효율을 곱해 준다. 식 (9)에 식 (5), (6)을 대입하면 다 음과 같이 배터리 동력을 전후륜 모터 토크 및 차량 의 함수로 표현할 수 있다.
_
_
≥
_
_
(10)
3.2 최적화 문제
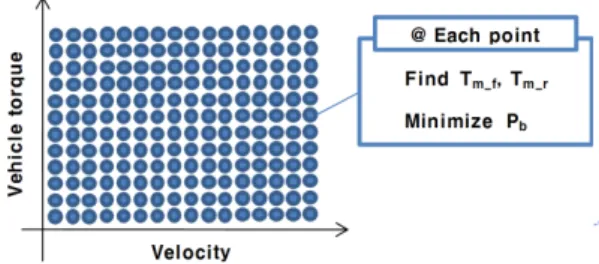
본 연구에서는 전후륜의 동력분배를 최적화 하여 에너지 소비를 최소화 하는 것이 목적이며, 다음과 같이 배터리 동력 Pb를 최소화 하는 것으로 최적화 문제의 목적함수를 설정할 수 있다.
(11)Fig. 5 Optimization for given velocity and vehicle torque
Fig. 5는 위 목적함수를 만족하는 최적화 문제를 풀기위한 과정을 도시한 것이다. 운전자의 가속페 달에 따라 차량 주행 토크 Tv가 결정되면, 차량이 구 동되어 차량속도 V 가 발생한다. 때문에, 차량 주행 토크 Tv와 차량속도 V 는 주어진 상황이라고 볼 수 있다. 식 (8)에서 차량 주행 토크 Tv와 차량속도 V 를 알면 전륜 인라인 모터 토크 Tm_f와 후륜 인휠 모터 토크 Tm_r의 관계를 알 수 있으며, 식 (10)에서 배터 리 동력 Pb를 계산할 수 있다. 즉, 주어진 차량 주행 토크 Tv와 차량속도 V 에서 목적함수 (11)을 만족하 는 전륜 인라인 모터 토크 Tm_f와 후륜 인휠 모터 토 크 Tm_r를 찾을 수 있다. 이에 Tv와 V 가 주어졌을 때,
P
b를 최소화 하는 Tm_f와 Tm_r을 찾는 것으로 다음 과 같이 최적화 문제를 정의 할 수 있다.
_
_ for
(12) 이때, 전후륜 모터의 토크 및 속도의 크기는 각 모 터의 최대 토크 및 속도보다 작다는 제한 조건을 다 음과 같이 설정할 수 있다.
_
__max (13)
_
__max (14)
_
__max (15)
_
__max (16)여기서, Tm_f_max는 전륜 인라인 모터 최대토크, Tm_r_max
는 후륜 인휠 모터 최대토크, ωm_f_max는 전륜 인라인 모터 최고회전속도, ωm_r_max는 후륜 인휠 모터 최고 회전속도이다.
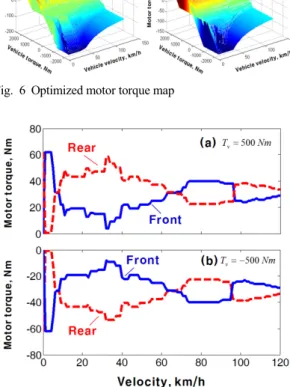
Fig. 6에 위 최적화 문제의 결과에 따라, 차량 주행 토크 및 속도에 따라 배터리 동력을 최소화 할 수 있 는 최적 전후륜 모터 토크 결과를 도시하였다. 이 결
김 정 민
Fig. 6 Optimized motor torque map
Fig. 7 Optimized motor torque map for ±500 Nm case
과는 최적 동력 분배맵 형태로, 최적 전후륜 동력분 배 제어에 사용된다.
Fig. 7은 Fig. 6의 최적 동력 분배맵 중 차량 주행 토크 Tv가 ±500 Nm 인 경우를 도시한 것이다. 차량 주행 토크 Tv = ±500 Nm 를 만족하면서, 배터리 동력 을 최소화 할 수 있는 전 후륜 모터 토크가 도시되어 있다. 특히, Fig. 7(a)와 Fig. 7(b)는 상하 대칭이다. 차 량 속도가 5km/h 이하에서는 전륜 인라인모터로만 차량이 구동되며, 이후 구간에서는 전후륜 모터가 적절히 조합되어 구동된다.
Fig. 8은 Fig. 6의 최적 동력 분배맵 중 차량 주행 토크 Tv가 ±1,000 Nm 인 경우를 도시한 것이다. 차량 속도가 10km/h 이하에서는 주로 전륜 인라인모터로 차량이 구동되며, 차량 속도 10km/h ~ 30km/h 구간 에서는 후륜 인휠모터로만 차량이 구동되는 것을 볼 수 있다. 이후 구간에서는 전후륜 모터가 적절히 조합하여 구동된다.
Fig. 8 Optimized motor torque map for ±1,000 Nm case
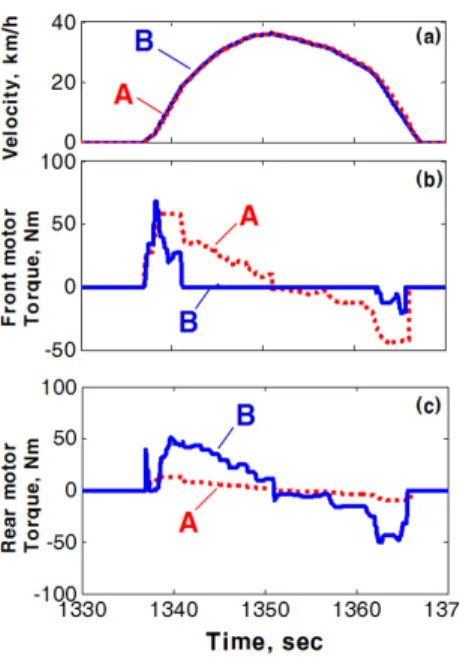
4. 최적 모터 동력 분배 시뮬레이션 3장에서 구한 최적 동력 분배맵의 성능을 확인하 기 위하여 시뮬레이션을 수행하였다. 시뮬레이션에 서 사용된 주행 사이클은 FUDS(federal urban driving schedule) 이며, 전후륜 동력 분배를 전후륜 모터 출 력비(50:32)로 수행된 경우(A), 최적 동력 분배맵을 사용된 경우(B) 두 가지에 대하여 시뮬레이션을 수 행하였다.
Fig. 9는 FUDS 시뮬레이션의 1330초 ~ 1370초 구 간 시뮬레이션 결과를 도시한 것이다. Fig. 9(a)에서 (A) 및 (B) 경우 모두 동일한 주행 속도를 보인다. 이 때 Fig. 9(b)에서 (A)의 경우 전륜 모터가 계속해서 차량 구동을 위해 작동하지만, (B)의 경우 1340초 부 근에서는 전륜 모터가 잠시 구동을 수행한 뒤 거의 구동이 수행되지 않는 것을 볼 수 있다. Fig. 9(c)에 서 (A)의 경우 후륜 모터의 구동 토크가 비교적 작지 만, (B)의 경우 차량 효율 향상을 위한 최적 동력 분 배에 따라 적극적으로 구동되는 것을 볼 수 있다.
(A) 경우와 (B)경우의 전후륜 모터 효율 및 배터 리 동력 결과를 긴 구간에 도시할 경우, 두 경우 그 래프의 차이 구별이 어렵다. 이에, Fig. 10은 FUDS 시뮬레이션 결과 중 1340초 ~ 1345초 구간의 전후륜 모터 효율 및 배터리 동력 결과를 확대 도시한 것이 다. Fig. 10(a)의 전륜 모터의 효율은 (A)경우와 (B)경 우의 차이가 거의 없다. 하지만, Fig. 10(b)의 후륜 모 터의 효율은 (B)경우가 (A) 경우 보다 효율이 우수
전륜 인라인 후륜 인휠 모터 적용 전기자동차의 최적 동력 분배
Fig. 9 FUDS simulation results for 1330sec ~ 1370sec
Fig. 10 FUDS simulation results for 1330sec ~ 1370sec
한 것을 확인할 수 있다. 이에 따라 Fig. 10(c)에서, 최 적 동력 분배맵을 사용한 경우(B)가 전후륜 모터 출 력비(50:32)로 전후륜 동력 분배를 수행한 경우(A) 보다 동일한 주행 조건에서 좀 더 적은 배터리 동력 을 사용하는 것을 볼 수 있다.
Fig. 11은 FUDS 시뮬레이션 전체 구간에서 차량
Fig. 11 FUDS simulation results
Table 2 FUDS simulation results
전후륜 동력 분배 배터리
에너지 소비 차이
(A) 전후륜 모터
출력비(50:32) 3.647 MJ
0.231 MJ (-6.3%)
(B) 최적 동력
분배맵 3.416 MJ
속도 및 배터리 에너지 소비 결과를 도시한 것이다.
FUDS의 500초 이하 구간에서는 차량 속도가 40km/h
~ 90km/h 이며, 이 구간에서는 (A) 및 (B)의 배터리 에너지 소비 차이가 크지 않는 것을 볼 수 있다. 하 지만, 500초 이후 구간에서는 차량 속도가 주로 40km/h 이하 구간이며, 이 구간에서는 전후륜 동력 분배를 수행한 경우(A)의 에너지 소비가 최적 동력 분배맵을 사용한 경우(B)보다 커지는 것을 확인 할 수 있다. 이에 따른 FUDS 시뮬레이션의 최종 결과 를 Table 2에 정리하였다.
전후륜 동력 분배를 전후륜 모터 출력비(50:32)로 수행한 경우(A)의 에너지 소비는 3.647MJ, 최적 동 력 분배맵을 사용한 경우(B)의 에너지 소비는 3.416 MJ 이다. 두 차이는 0.231 MJ 이며, 이 연구에서 제 안한 최적 동력분배맵을 사용하였을 경우 약 6.3%
의 에너지 소비가 감소되는 것을 확인할 수 있다.
5. 결 론
이 연구에서는 전륜은 기존 전기자동차와 동일한 인라인(in-line) 모터가 장착되고, 후륜에는 인휠
Jeongmin Kim
(in-wheel)모터가 장착된 소형 전기자동차의 최적화 된 전후륜 구동력 분배 로직을 개발하고, 시뮬레이 션을 통하여 그 성능을 검증하였다. 먼저, 차량 주행 토크 및 속도가 주어졌을 때, 배터리 동력을 최소화 하는 전륜 인라인 모터 및 후륜 인휠 모터 토크를 찾 는 것으로 최적화 문제를 정의하였으며, 이를 이용 하여 최적 전후륜 모터 토크 분배맵을 구성하였다.
최적 동력 분배맵의 성능을 확인하기 FUDS(federal urban driving schedule)을 기반으로, 전후륜 동력 분 배를 전후륜 모터 출력비(50:32)로 수행된 경우(A), 최적 동력 분배맵을 사용된 경우(B) 두 가지에 대하 여 시뮬레이션을 수행하였다. 시뮬레이션 결과 (A) 경우는 3.647MJ, (B) 경우는 3.416 MJ 의 배터리 에 너지 소비를 보였으며, 이 연구에서 제안한 최적 동 력분배맵을 사용하였을 경우 약 6.3% 에너지 소비 가 감소되는 것을 확인하였다.
이 연구를 통하여 얻은 결과는 향후 인휠 모터가 장 착된 전기자동차의 효율 향상을 위한 기초 제어로직으 로 활용될 수 있을 것으로 기대된다.
후 기
이 논문은 2013년도 안동대학교 특별연구지원사업 에 의하여 연구되었음.
References
1) Y. Kageyama, K. Hisada and H. Misawa, “Tech- nology for Distinctive Handling Performance of the Newly Developed,” SAE 2011-39-7207, 2011.
2) M. Kamachi and T. Hosokawa, “Study on Practicality of Electric Vehicle “i-MiEV” under Severe Weather,” SAE 2011-39-7241, 2011.
3) J. Kim, I. Kim, C. Lee, S. Park, K. Park, I. Jo, K.
Park and H. Moon, “Development of In-wheel Traction System for Electric Vehicle,” KSAE Spring Conference Proceedings, pp.2259-2263, 2011.
4) D. Kim, K. Shin, S. Lee and T. Yeo, “Develop- ment of In Wheel Motor System on Rear Wheels for Small Electric Vehicle,” KSAE Annual Conference Proceedings, pp.1350-1354, 2010.
5) J. Kim, C. Park, S. Hwang, Y. Hori and H.
Kim, “Control Algorithm for an Independent Motor-drive Vehicle,” IEEE Transactions on Vehicular Technology, Vol.59, No.7, pp.3213- 3222, 2010.
6) S. Kim, C. Kim, D. Kim, J. Choi, M. Choi and C. Han, “A Study on Traction and Yaw-rate Control for the Rear In-wheel Independent Drive Electric Vehicle,” KSAE Spring Confer- ence Proceedings, pp.1015-1019, 2011.
7) Y. Kim, C. Park and G. Wang, “A Fundamental Study on the Control of Ride Comfort and Attitude for In-wheel Motor Vehicles,” Trans- actions of KSPSE, Vol.16, No.1, pp.91-97, 2012.
8) B. Jacobsen, “Potential of Electric Wheel Motors as New Chassis Actuators for Vehicle Maneuvering,” Proc. Inst. Mech. Eng., Part D:
J. Automobile Eng., Vol.216, No.8, pp.631-640, 2002.
9) N. Mutoh, “Front and Rear Wheel Independent Drive Type Electric Vehicle (FRID EV) with Compatible Driving Performance and Safety,”
World Electric Vehicle Journal, Vol.3, No.1, pp.1-10, 2009.
10) H. Song, Y. Lee, J. Baek, J. Park and S. Hwang,
“Driving Force Distribution Algorithm for Improved Driving Efficiency of 4-Wheel-drive In-wheel Electric Vehicles,” KSAE Spring Conference Proceedings, pp.1846-1850, 2013.
11) J. Santiago, H. Bernhoff, B. Ekergård, S.
Eriksson, S. Ferhatovic, R. Waters and M.
Leijon, “Electrical Motor Drivelines in Com- mercial All-electric Vehicles: A Review,” IEEE Transactions on Vehicular Technology, Vol.61, No.2, pp.475-484, 2012.