Redundancy resolution method of omni-directional mobile manipulator system
6
0
0
전체 글
(2) 전방향 이동 머니퓰레이터 시스템의 여유자유도 최적화 방법. 되어 특정 위치에서만 작업 수행이 가능하여 차. (omni-directional) 이동 플랫폼과 이동 플랫폼 상에. 체 실링 작업의 경우 한쪽 면에 대한 작업만 가능. 설치된 링크형 머니퓰레이터로 구성하였다.. 한 단점이 있다. 실제로 자동차의 생산 공정에서. 전방향 이동 플랫폼은 종횡의 병진 운동을 하. 는 두 대 이상의 로봇 시스템이 협업을 해야 자동. 는 2 자유도를 생성하는 요소로서 그 상부에 링크. 차 차체 1대에 대한 전체 작업을 완료할 수 있다.. 형 머니퓰레이터가 설치된다. 특히, 전방향 이동. 따라서 차량의 도색이나 실링 작업에 적용되는. 로봇에 적용될 수 있는 4개의 휠로서 메카넘 휠. 로봇 시스템에 관련된 기술 분야에서는 도색 또. (mecanum wheel)이 적용되는 경우, 횡방향으로 이. 는 실링 등의 작업을 더욱 효과적으로 수행하기. 동함에 있어서 추가적인 공간이나 본체의 회전이. 위해,. 없이 즉각적으로 가능하므로 2축의 직동 조인트. 이동 로봇에 직렬형 머니퓰레이터(sirial. manipulator)가 결합된 이동 머니퓰레이터 시스템 (mobile manipulator system)이 요구되며, 이동 머니 퓰레이터의 여유자유도를 이용한 효과적인 동작. 를 갖는 시스템으로 모델링이 가능하다. 링크형 머니퓰레이터는 2 자유도의 회전 운동 을 하는 링크형 머니퓰레이터이다.. (관절 공간 제한 회피, 특이점 회피, 충돌 회피)을. 이와 같이, 본 연구에 사용된 전방향 이동 머니. 위한 이동 머니퓰레이터의 여유자유도 최적화 기. 퓰레이터 시스템은 2 자유도의 전방향 이동 플랫. 법이 요구되고 있다.1,2,5). 폼과 2 자유도를 갖는 링크형 머니퓰레이터를 포. 본 연구는 이동 머니퓰레이터 시스템(mobile. 함하여 총 4 자유도를 갖는다.. manipulator system)에 관한 것으로, 전방향 이동. 도색 또는 실링 공정과 같은 일 평면에서의 작. 플랫폼에 링크형 머니퓰레이터를 결합하여 생성. 업이 각도를 포함하여 3 자유도로 구성된다고 할. 된 여유자유도를 포함하는 이동 머니퓰레이터 시. 때, 본 논문에서 사용된 이동 머니퓰레이터 시스. 스템을 최적의 이동성과 작업성을 동시에 달성할. 템은 1 자유도를 더 갖는 여유자유도 시스템이 된. 수 있도록 여유자유도의 최적의 해를 구하는 연. 다. 이 경우 동작 생성을 위해 가능한 로봇자세의. 구를 수행하였다.. 경우의 수가 무한대이므로 이 중에서 최적의 해 를 결정해야 한다.. 2. 이동 머니퓰레이터 시스템의 구성 3. 여유자유도 로봇 해석 Fig. 1은 본 연구에 사용된 이동 머니퓰레이터 시스템의 사진이다.. 3.1 로봇 머니퓰레이터의 기구학. Fig. 1 Mobile manipulator system configuration. Fig. 2 Diagram of mobile manipulator system. Fig. 1에서 보는 바와 같이 이동 머니퓰레이터. Fig. 2는 본 연구에 사용된 전방향 이동 머니퓰. 시스템은. 크게. 두. 가지. 플랫폼으로,. 전방향. 76 한국동력기계공학회지 제19권 제3호, 2015년 6월. 레이터 시스템의 개략도를 보여준다..
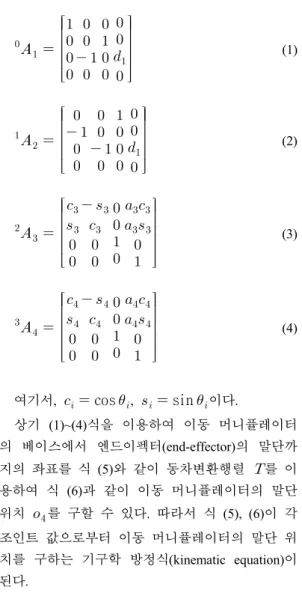
(3) 권순재 ․ 정재웅. 기구학 해석의 편의를 위하여 전방향 이동 플 랫폼을 2개의 직동 조인트를 갖는 시스템으로 모. . 델링하고, 상부 설치되는 링크형 머니풀레이터를 2개의 회전 조인트를 갖는 시스템으로 모델링이 가능하다.. . . . (1). . . . (2). . . (3). . (4). . . 여기서, cos , sin 이다. 상기 (1)~(4)식을 이용하여 이동 머니퓰레이터 Fig. 3 Coordinates system of mobile manipulator. 의 베이스에서 엔드이펙터(end-effector)의 말단까 지의 좌표를 식 (5)와 같이 동차변환행렬 를 이. D-H(Denavit-Hartenberg) 파라미터 규약에 따라. 용하여 식 (6)과 같이 이동 머니퓰레이터의 말단. Fig. 3과 같이 좌표계를 설정하였다.3) 결정된 DH. 위치 를 구할 수 있다. 따라서 식 (5), (6)이 각. 파라미터 값들은 Table 1과 같다. Table 1에서 전. 조인트 값으로부터 이동 머니퓰레이터의 말단 위. 방향 이동 플랫폼의 병진운동을 2개의 직선조인. 치를 구하는 기구학 방정식(kinematic equation)이. 트 , 로 표현하고, 상부의 링크형 머니퓰레이. 된다.. 터의 동작을 2개의 회전조인트 , 로 나타내 . . 었다.. . Table 1 DH Parameters Link. . . 1. 0. -90°. 2. 0. -90°. . 3. . 0. 0. 0. 0. 4. 0 -90°. . (5). . . . . . (6). 이 때, 서로 이웃하는 좌표계들 사이의 동차변 환 (homogeneous transformation) 행렬들은 다음 식 (1)~(4)와 같다.. 여기서, cos , sin 이다.. 한국동력기계공학회지 제19권 제3호, 2015년 6월 77.
(4) 전방향 이동 머니퓰레이터 시스템의 여유자유도 최적화 방법. 로, 3 자유도 평면 공간상에서 모션을 형성하는. 3.2 로봇 머니퓰레이터의 자코비안 실링 작업을 위해 이동하는 로봇 머니퓰레이터. 경우 여유자유도가 1인 시스템이 된다. 이 경우. 의 위치는 시간에 따른 의 경로로 표시할 수. 모션 생성을 위해 가능한 로봇자세의 경우의 수. 있다. 식 (7)과 같이 변수들을 정의하면 식 (8)과. 가 무한대이므로 이 중에서 최적의 해를 결정해. 같이 로봇 머니퓰레이터의 자코비안(Jacobian)을. 야 한다. 3장에서 유도한 자코비안 행렬을 이용하. 구할 수 있다.. 여 속도 레벨에서의 여유자유도 문제를 구하는 자코비안 의사 역행렬 를 사용하여 다음의 식 (9)와 같이 최적 해를 구할 수 있다. 이 식 (9)를. . . . (7). 터의 경로가 주어질 때 전방향 이동 머니퓰레이 터의 각 조인트 속도 및 위치를 구할 수 있다.. ⇕. . . . . . . . 최적화 문제에 대한 해로서 각 조인트 변수들의 속도의 크기의 합을 최소화하는 최적해임이 알려 져 있다.4). ∙ . . (9). 상기 식 (9)로 주어지는 식은 다음의 식 (10)의. . . . 통해 실링 또는 도장 작업에 사용되는 엔드이펙. . (8). . min ∙ subject to . (10). 다음 방법은 조인트 변수들의 속도의 크기에 가중치를 부여한 후 이를 최소화하는 해를 구함 으로써 최적 해를 산출할 수도 있다. 조인트 변수 들의 속도의 크기에 가중치를 부여한 후 이를 최 소화하는 해를 구하는 데에는 대각 행렬 가 이 용되며, 이는 각 조인트 변수들 간의 중요도를 조. 상기 식 (7)과 식 (8)에 나타난 것과 같이, 자코 비안(Jacobian) 행렬은 이동 머니퓰레이터 시스템 에 장착되어 있는 엔드이펙터의 시간에 따른 경 와 조인트 각각의 시간에 따른 경로 로 사이의 관계를 나타낸다.. 4. 여유자유도 최적화 방법. 절할 수 있는 기법으로서 다음의 식 (11)과 같이 주어진다.. . (11). 상기 식 (11)로 주어지는 식은 다음의 식 (12)의 최적화 문제에 대한 해이다. 식 (12)에서 의 대. 2장에서 설명한 바와 같이, 본 연구에서 구성된 이동 머니퓰레이터 시스템은 4 자유도를 가지므. 78 한국동력기계공학회지 제19권 제3호, 2015년 6월. 각 성분들의 크기를 조절함으로써 각 조인트 속 도들 사이의 중요도를 달리할 수 있게 한다..
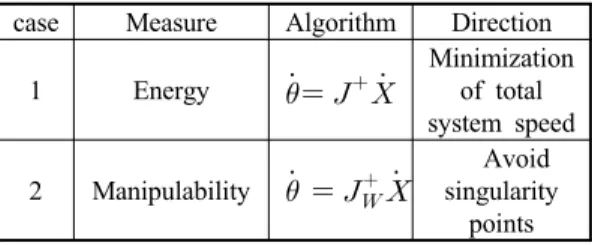
(5) 권순재 ․ 정재웅. min ∙ subject to . (12). 적화 성능 지수는 시스템의 조작성이 되고 해는 시스템의. 조작성. 최적화. 문제(manipulability-. optimal problem)를 해결하는 해가 된다. 이상과 같은 두 가지 최적화 기법을 정리하면. 식 (9)와 같이 의사 역행렬을 이용하여 전방향. 다음의 Table 2와 같다.. 이동 머니퓰레이터의 최적 이동경로를 구하는 경. 5. 결 론. 우, 이는 전체 조인트 속도들의 놈(norm)의 최소 값을 구하는 해이다. 따라서 이동 머니퓰레이터 시스템의 전체 에너지의 소모를 최소화하는 에너. 본 연구에서는 로봇 머니퓰레이터의 이동성과. 지 최적화 문제(energy-optimal problem)를 해결하. 작업성을 향상시키기 위해 전방향 이동 플랫폼에. 는 해가 된다. 이 때 최적화 성능지수는 시스템의. 링크형 머니퓰레이터가 탑재되어 작업하는 이동. 에너지가 된다.. 머니퓰레이터 시스템을 제안하였고 이러한 이동. 반면에 식 (11)은 가중치를 준 의사 역행렬을. 머니퓰레이터 시스템이 최적의 이동과 작업성을. 사용하여 해를 구한 경우이다. 직렬형 머니퓰레이. 가지기 위해서 여유자유도 최적화 방법을 연구하. 터에서는 로봇 머니퓰레이터가 곧게 펴진 상태가. 였다.. 특이점(singularity point) 중의 하나이고 특이점 근. 본 연구에서 제안한 작업 형태에 따른 이동 머. 방에서는 머니퓰레이터의 제어, 경로 계획 등 여. 니퓰레이터 시스템의 최적화 방법은 여유자유도. 러 가지 면에서 어려움이 생기기 때문에 가능하. 의 최적화를 통해 필요에 따라 이동 머니퓰레이. 면 특이점에서 먼 자세를 좋은 자세로 규정한다.. 터 시스템의 에너지 또는 조작성능을 각각 최적 화할 수 있는 알고리즘을 도출하여 전체 조인트. Table 2 Two case of optimization method case. Measure. 1. Energy. 2. Manipulability. Algorithm. Direction Minimization of total system speed Avoid singularity points. 이동 머니퓰레이터의 좋은 자세에 대한 척도로. 의 속도를 최소화 하거나 특이점 회피를 최대화 하여 다양한 응용에 필요한 최적의 성능을 도출 할 수 있다.. 후 기 이. 논문은. References. 가중치를 준 의사 역행렬을 사용하여 구한 해에 된다. 예를 들어 3자유도 평면 공간상에서 여유자 유도 1을 가지는 4자유도 시스템은 특이점을 회 피할 수 있는 동작 경로를 생성함에 있어 최적화 케이스 2의 알고리즘으로 시스템의 이동성 및 작 업성이 향상될 수 있다. 즉 로봇의 제어, 후속 동 작의 편리성 등에서는 가중치를 준 의사 역행렬 을 사용하여 구한 해가 일반 의사 역행렬을 사용 하여 구한 해보다 장점이 있다. 따라서 이때의 최. 자율창의학술연구비. (2014년)에 의하여 연구되었습니다.. 조작성능 지수(manipulability measure)가 있으며, 서 이동 머니퓰레이터의 조작성능 지수가 크게. 부경대학교. 1. K. J. Choi and S. H. Dea, 2008, “Optimization of Whole Body Cooperative Posture for an 18-DOF. Humanoid. Algorithm”,. Journal. Robot of. Using. Institute. a. Genetic. of. Control. Robotics and Systems, Vol. 14, No. 10, pp. 1029-1037 2. J. H. Lee, J. Y. Kim, J. H. Lee, D. H. Kim, H. K. Lim and S. H. Ryu, 2012, “Inverse Kinematics Solution and Optimal Motion Planning for I. 한국동력기계공학회지 제19권 제3호, 2015년 6월 79.
(6) 전방향 이동 머니퓰레이터 시스템의 여유자유도 최적화 방법. ndustrial Robots with Redundancy", Journal of Robotics Society”, Vol 7, No. 1, pp. 35-44. 3. K. S. Fu, 1987, Robotics, McGraw-Hill. 4. Y.. Nakamura,. 1991,. Advanced. 5. K. J. Park and J. Kang, 2001, “Path Design of Redundant. Flexible. Robot. Manipulators. to. Reduce Residual Vibration in the Presence of robotics:. redundancy and optimization, Addison-Wesley.. 80 한국동력기계공학회지 제19권 제3호, 2015년 6월. Obstacles”, Journal of the Korean Society for Power System Engineering, Vol 5, pp. 79-86..
(7)
수치

관련 문서
• Various types take different amount of memory and some pointer operations require knowledge of that size... Pointers:
indicated input stream fgets( char *s, int n, FILE *) Address of the string/NULL pointer. fputs() Writes the character string pointed to
– This line announces that the program uses a type void function called starbar() & compiler expect to find the definition for this function elsewhere.. May put
To focus our discussion on inverse kinematics, we wifi assume that the necessary transformations have been performed so that the goal point is a specification of the
Here we compute the closed-form dynamic equations for the two-link planar manipulator shown in Fig. For simplicity, we assume that the mass distribution is extremely simple:
The resolved-rate control method [9] is based on the manipulator velocity equation kX = kje where kj is the Jacobian matrix, e is the vector of relative joint rates, kX is the
Many other parts of method (e.g. sample matrix, CO2 in air, source of water used for your mobile phase) can change the pH of the mobile phase causing shifts in retention,
A Method for Line Parameter Estimation of Unbalanced Distribution System based on Forward/Backward Sweep Using..
