Moving Window 기반 굴삭기용 과부하 검출 알고리즘
유창호†․최재원*․서영봉**
Moving Window Based Overload Detection Algorithm for Excavator
Chang Ho Yu, Jae Weon Choi, and Young Bong Seo
Key Words: Time Series Analysis(시계열 분석), Overload Detecting(과부하 검출), Moving Window(이동식 윈도우), Sensor Fusion(센서 융합)
Abstract
In this paper, an overload detecting algorithm for an excavator is presented. The proposed overload detecting algorithm is based on the time series analysis especially moving window. The main purpose of this paper is to prevent a damage or crack from the fatigue in advance. 16 channel sensors data are considered and maximum stress is computed by a sensor fusion method every moving window.
After the maximum stress every window is compared with a given threshold, this overload detecting algorithm decides overload or not.
† 회원, 부산대학교 지능기계공학과 E-mail : [email protected]
TEL : (051)510-3203 FAX : (051)514-0685
* 부산대학교 기계공학부
** 부산대학교 기계기술연구소
1. 서 론
오늘날 다양한 대형 구조물의 증가는 대형 구 조물을 구축하기 위한 중대형 건설장비들의 사용 을 촉진시키고 있으며, 극지 및 오지에서의 다양 한 작업을 수행하기 위한 중대형 건설장비의 사 용 빈도 또한 점차 증가되고 있다. 이러한 중대 형 구조물 장비의 경우, 구조물의 손상에 의하여 많은 인적, 경제적 손실이 따르므로 구조물 손상 의 사전 방지에 관한 많은 관심이 모아지고 있 다.
이미 선진국에서는 1959년 노후 항공기의 안전 대책을 위하여 구조물 건전성에 대한 연구가 시 작되었으며, 그 이후 대형 구조물의 건전성 모니 터링에 관하여 산업계는 물론 학계에서 다양한 연구가 이루어지고 있다. 구조물의 건전성 모니
터링이란 구조물에 가해지는 외부의 작은 부하에 서 시작하여 충격과 아울러 피로에 의한 크랙 검 출까지를 포함하는 구조물 전반의 건전성에 대한 상태 감시를 말한다.
최초의 구조물 건전성 모니터링은 노후 항공기 의 안전성 문제 검토에서 시작되었다. 20년을 넘 긴 항공기는 오랜 운용 환경으로 부식, 피로에 의한 기계적 수명이 기준치를 초과함으로 인해 기체의 구조물 안전성에 문제가 발생하였다. 이 러한 안전성 문제는 초창기의 항공기에서 시작하 여 나아가 교량 등 대형 구조물을 포함하는 전반 적인 시설에 이르기까지 범위를 넓혀 다양한 구 조물에 나타나게 되었다. 따라서 이러한 문제를 해결하기 위한 다양한 방법이 개발되어 운용되고 있다. 일례로 많은 인명 피해는 물론 경제적인 피해를 초래한 1994년 성수대교 붕괴 사고를 들 수 있다. 이 사고가 발생한 이후, 교량형 구조물 의 건전성 모니터링을 위하여 다양한 종류의 센 서가 적용된 스마트형 교량이 건축되었다. Fig. 1 은 대형 구조물의 하나인 교량의 건전성이 모니 터링되는 스마트형 교량인 진도대교이다.
Fig. 1. Safety monitoring smart bridge
Table 1은 스마트형 교량인 진도대교에 적용된 센서의 종류 및 용도를 보여준다.
Table 1. Sensors for smart bridge
교량 구조물의 사례에서는 건전성 평가를 위해 변형률 측정을 위한 스트레인 게이지 센서, 충격 력 측정을 위한 가속도 센서가 대표적으로 사용 된 것을 볼 수 있다.
본 논문의 대상 시스템인 굴삭기의 건전성 평 가를 위해 사용되는 센서 또한 대부분 상기의 센 서들을 이용한 모니터링이 주를 이루고 있다.
각종 건설 공사현장에서 굴토 및 굴착 작업에 폭넓게 사용되는 건설 중장비인 굴삭기는 다기능 성과 경제성 등의 장점으로 인해 건설 중장비 중 에서 가장 많이 사용되는 장비이다. 굴삭기의 작 업의 종류는 굴삭, 파쇄, 지균, 호파기, 상차, 기 중작업 등으로 나눌 수 있으며 작업의 종류에 따 른 용량한계도 다양하다. 하지만 현장에서 작업 하는 굴삭기 운전자들은 굴삭기의 용량한계에도 불구하고 작업을 계속 진행함으로 인해 굴삭기에 과부하(overload)를 발생시키게 된다. 결국 굴삭기 를 구성하는 boom, arm, bucket 부분에는 과부하 로 인한 피로(fatigue)의 축적에 의해 크랙이 발생
하여 굴삭기의 고장 및 파손 등과 같은 안전문제 가 발생하게 된다. Fig. 2는 굴삭기를 구성하는 boom, arm, bucket의 구조이다.
Fig. 2. Excavator structure
본 논문에서는 과부하로 인해 굴삭기에 발생하 는 고장 및 파손 현상을 사전에 방지하기 위해 시계열 분석(time series analysis)에 기반한 굴삭기 용 과부하 검출 알고리즘을 제안하고 시뮬레이션 결과에 대해 고찰한다.
2. 29톤급 굴삭기 sensor data 분석
본 연구를 위해 (주)볼보건설기계코리아에서는 29톤급 굴삭기의 boom과 arm에 16개의 스트레인 게이지(strain gauge)를 부착하여 실험을 수행하였 다. Arm에 S113부터 S118까지의 6채널의 스트레 인 게이지를, boom에 S119부터 S128까지의 10채 널의 스트레인 게이지를 부착하였으며 실제 현장 작업 시 파손이 가장 많이 발생하는 부위에 각각 의 센서를 부착하였다. Boom의 센서 부착위치는 Fig. 3, Fig. 4, Arm의 센서 부착위치는 Fig. 5와 같다.
S119 S120
S123
Fig. 3. Sensor position on boom(a)
S 121 S 122 S 126 S 127 S 125
S 128 S124
Fig. 4. Sensor position on boom(b)
S 1 1 4 S 1 1 8
S 1 1 3 S 1 1 5
S 1 1 7 S 1 1 6
Fig. 5. Sensor position on arm
본 논문에서는 굴삭기의 boom에 설치된 센서 에 국한하여 각 부위별 변형률 수치를 비교한다.
구체적으로 S123, S125, S128 센서의 수치를 비교 하여 시뮬레이션을 수행한다. 그 이유는 boom의 센서들 중 위의 세 가지 센서에서 최대 인장 및 압축응력이 발생하기 때문이다.
2.1 16채널의 센서를 통한 변형률 분석
S123 센서를 통해 얻을 수 있는 변형률 그래프 는 Fig. 6과 같다. Fig. 6에서 20초마다 최대 압축 응력이 발생하는 것을 알 수 있으며 약 50.38초 일 때 약 467.61598㎛의 최대 압축변형을 일으킨 다.
Fig. 6. Strain for sensor S123
S125 센서를 통해 얻을 수 있는 변형률 그래프 는 Fig. 7과 같다. Fig. 7에서 20초마다 최대 압축 응력이 발생하는 것을 알 수 있으며 약 29.49초 일 때 약 201.37018㎛의 최대 압축변형을 일으킨 다.
Fig. 7. Strain for sensor S125
S128 센서를 통해 얻을 수 있는 변형률 그래프 는 Fig. 8과 같다. Fig. 8에서 20초마다 최대 인장 응력이 발생하는 것을 알 수 있으며 약 50.92초 일 때 약 507.14592㎛의 최대 인장변형을 일으킨 다.
Fig. 8. Strain for sensor S128
Boom에 설치된 센서들 중 S123, S125, S128 센 서를 제외한 11채널의 센서 변형률 그래프 역시 앞에서 살펴본 그래프와 비슷한 결과를 얻을 수 있다. 주기는 20초이며 센서의 부착 위치에 따라 최대 인장변형 또는 최대 압축변형을 일으킨다.
2.2 최대 인장 및 압축 변형률 조사
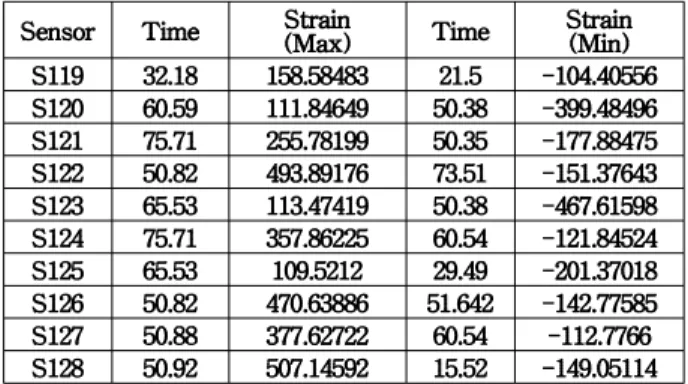
먼저 굴삭작업 시 boom에 작용하는 응력에 의 한 변형률 수치를 센서 위치별로 정리해 보면 Table 2와 같다.
Table 2. Comparison of strains for boom
Table 2에서 살펴보듯이 S128 센서에서 최대 인 장응력에 의해 507.14592㎛의 최대 인장 변형률 수치를 보이고, S123 센서에서 최대 압축응력에 의해 467.61598㎛의 최대 압축 변형률 수치를 보 이는 것을 알 수 있다. 따라서 boom 부위에서는 S123, S128 센서로부터 들어오는 신호를 매우 중 요하게 분석할 필요가 있음을 판단할 수 있다.
3. 시계열 분석을 통한 과부하 검출 알고리즘
본 장에서는 앞에서 분석한 (주)볼보건설기계코 리아의 29톤급 굴삭기의 16채널 센서 데이터를 바탕으로 굴삭기 크랙 및 파손의 조기검출을 위 해 제안된 과부하 검출 알고리즘에 대해 살펴본 다.
먼저, 본 논문에서 제안하는 과부하 검출 알고 리즘의 기본이 될 수 있는 시계열 분석의 개념과 도입 필요성에 대해 언급하고 과부하 검출 알고 리즘에 대해 구체적으로 살펴본다.
3.1 시계열 분석 개념 및 도입 필요성
시계열 분석에서 다루고자 하는 자료들은 국민 총생산고, 물가지수, 상품의 판매량, 종합주가지 수, 강우량, 태양의 흑점, 과학실험실에서의 실험 및 관측 자료 등과 같이 연도별, 계절별, 월별, 일별 또는 보다 작은 시간대로서 시, 분, 초별로 시간의 흐름에 따라 순서대로 관측되므로 시간의 영향을 받게 된다. 이와 같이 시간에 따라 관측 된 자료를 시계열 자료라고 한다.
시계열들은 생성되는 특성에 따라 연속적으로 생성되는 연속시계열(continuous time series)과 이 산적 시점에서 생성되는 이산시계열(discrete time series)의 두 경우로 나누어 생각할 수 있다. 많은 시계열들이 실제로는 연속적으로 생성되고 있으 나, 일정한 시간간격을 두고 관측되므로 이산시 계열자료의 형태를 지니고 있는 경우가 많다.
시계열 자료를 분석하는 목적은 크게 보아 두 가지로 나눌 수 있는데, 그 첫째는 과거 시계열 자료의 패턴이 미래에도 지속적으로 유지된다는 가정 하에서, 현재까지 수집된 자료들을 분석하 여 미래에 대한 예측을 하는 것이다. 과거부터 수집되어온 어떤 상품의 판매고의 자료를 분석하 면 미래의 판매고를 예측할 수 있을 것이다. 둘 째로는 시계열 자료가 생성된 시스템 또는 확률 과정을 모형화하여 시스템 또는 확률과정을 이해 하고 제어할 수 있도록 하는 것이다.
본 논문에서는 (주)볼보건설기계코리아의 29톤 급 굴삭기 센서 데이터의 패턴이 과거부터 현재, 그리고 미래까지 지속적으로 유지될 것이라는 가 정을 바탕에 둔다. 따라서 현재 시점의 센서 신 호의 패턴이 과거의 그것과 비교해 다르다고 판
정되면 굴삭기에 과부하에 의한 크랙이나 파손이 발생할 수 있다고 판단하여 굴삭기 작업자로 하 여금 작업을 중지하도록 명령하는 것이다.
3.2 Moving window 개념을 이용한 과부하 검출 알고리즘
시계열 자료의 특징은 자료들이 시간의 흐름에 따라 장기간에 걸쳐 관측된다는 점이다. 따라서 시간이 경과함에 따라 시계열이 생성되는 시스템 자체에 변화가 올 수 있으므로 초기에는 잘 부합 되던 모형이 시간이 경과함에 따라 잘 맞지 않게 되는 경우가 많이 있다. 이처럼 시계열이 생성되 는 시스템에 변화가 있는 경우에 과거의 모든 자 료를 동일하게 취급하여 구한 예측값보다는 시스 템이 변화한 변화시점에 가까운 최근의 자료에 더 큰 비중을 주는 예측법을 사용하는 것이 합리 적일 것이다. 이러한 예측방법으로 지수평활법 (exponential smoothing)이 있다[1, 2].
지수평활법은 최근의 자료에 더 큰 가중값을 주고 과거로 갈수록 가중값을 지수적으로 (exponentially) 줄여나가는 방법이다. 따라서 최근 의 자료를 주로 이용하여 미래를 예측해주므로 시계열이 생성되는 시스템에 변화가 있을 경우 이 변화에 쉽게 대처할 수 있으며 그 계산법이 쉽고 많은 자료의 저장이 필요없다는 장점이 있 어 많은 사람들이 사용하여 왔다. 많이 사용하는 지수평활법으로는 단순지수평활법, 이중지수평활 법, 삼중지수평활법과 Winters의 계절지수평활법 등이 있다.
이동평균법(moving average method)은 시계열 자료들의 평활에 의해 계절성분 또는 불규칙성분 을 제거하여 전반적인 추세를 뚜렷하게 파악할 수 있도록 해준다. 이동평균법은 표본평균처럼 관측값 전부에 동일한 가중값을 주는 대신에 최 근 개의 관측값 만을 이용하여 평균을 구하고 이를 이용하여 예측을 하므로 지엽적인 변동을 제거하여 장기적인 추세를 쉽게 파악할 수 있도 록 해준다. 따라서 시계열이 생성되는 시스템에 변화가 있을 경우 이 변화에 쉽게 대처할 수 있 으며 그 계산법이 쉽고 많은 자료의 저장이 필요 없다는 장점이 있어 많이 사용되고 있다[3].
본 논문에서는 최근 개의 관측값 만을 이용 한다는 이동평균법의 개념에서 moving window라
는 용어를 사용한다.
3.2.1 Moving window 개념
Moving window란 다중 센서를 통해 들어오는 측정치들 중 일정한 크기의 window 내부에 포함 되는 data만을 처리하는 기법이다. Window 내의 측정치들 중 dominant한 센서 data의 가중치 (weighting)를 크게하여 굴삭기 각 부위에 발생하 는 과부하의 효율적인 검출을 가능하게 하는 센 서 융합기법이다.
3.2.2 과부하 검출 시나리오
Fig. 9 Scenario for overload detection
Fig. 9에서 살펴보듯이 n개의 센서를 통해 들어 오는 측정치들에 가중치(weighting)를 계산하여 가 중치가 곱해진 측정치들의 합이 window내의 변 형률값이 된다. Window내의 변형률값이 임계 변 형률값의 95%보다 크게 되면 과부하라고 판단하 여 경고를 주게 되며 변형률값이 임계 변형률값 의 95% 이내에 있으면 안전하다고 판단하여 계 속적으로 작업을 진행하게 된다.
4. 시뮬레이션
4.1 시뮬레이션 조건
시뮬레이션에 사용된 센서는 S123, S125, S128 의 3개의 센서이며 그 위치는 Fig. 10과 같다.
Fig. 10. Sensor position on Boom for simulation
그리고 샘플링 주기가 10ms로써 하나의
window 내에서 100개의 data를 측정한다. 따라서 data가 100Hz로 생성되므로 1초마다 window가 움 직인다고 생각할 수 있다. 그리고 임계 변형률값 은 400㎛로 설정하였다.
4.1 시뮬레이션 결과
Fig. 11에서 보듯이 3개의 센서 data는 약 20초 의 주기를 가진 일정한 패턴을 보이는 것을 알 수 있다. 그 이유는 굴삭작업을 약 20초 동안 반 복 수행하기 때문이다.
3개의 센서 data를 동시에 1초 간격으로 window를 움직이며 그 window내에서 최대값의 data를 가져와 가중치를 구한다. 가중치가 곱해진 센서 data값은 그 window내에서 하나의 변형률값 으로 계산되어지며 그 변형률값과 임계 변형률값 과의 크기 비교를 통해 과부하인지 아닌지를 판 가름한다.
Fig. 11. Moving window applied to three sensors data
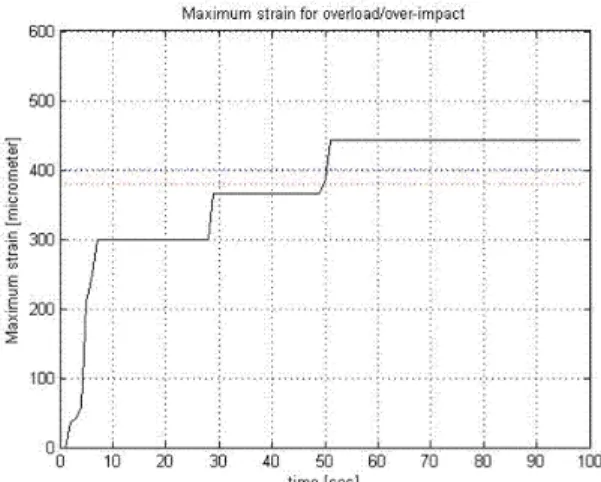
Fig. 12. Simulation result for overload detection
Fig. 12를 보면 약 10초, 30초, 50초에 그래프의 형태가 계단식으로 바뀐 것을 볼 수 있다. 그 이 유는 Fig. 11에서 보듯이 약 10, 30, 50초에 굴삭 작업을 통해 굴삭기에 큰 응력이 발생하기 때문 이다. 그리고 S123, S125, S128 센서의 최대 변형 률값은 10초, 30초, 50초때 마다 계속 커지는 경 향이 있으며 매 window의 변형률값이 이전 window의 변형률값보다 크면 이전 변형률값을 버리는 알고리즘이므로 결과적으로 계단식 형태 를 보이는 것이다.
시뮬레이션 조건으로 임계 변형률값을 400㎛으 로 준 결과 Fig. 12에서처럼 약 50초때 임계 변형 률값의 95%를 초과하여 과부하로 판정되어 경고 를 울려주는 것을 볼 수 있다.
4. 결 론
본 논문에서는 다양한 작업을 수행하는 굴삭기 차체에 가해지는 과부하의 검출을 위하여 (주)볼 보건설기계코리아에서 제공받은 응력 data를 통해 과부하 검출 알고리즘을 제안하였다.
본 논문에서 제시한 과부하 검출 알고리즘을 통해 굴삭기 뿐만 아니라 자동차, 선박 등과 같 은 시스템의 고장 검출도 효과적으로 할 수 있으 리라 생각된다.
후 기
본 연구는 VOLVO TMK R/C 원천기술개발사 업의 연구비 지원으로 수행되었음.
참고문헌
[1] 조신섭, 손영숙, 시계열분석, 1999, 율곡출판사 [2] 윤용운, 예측방법론의 이해, 1995, 자유아카데
미
[3] Richard O. Duda, Peter E. Harta, and David G.
Stork, Pattern Classification, 2nd Ed. 2001, John Wiley & Sons, Inc.