논문 2015-52-9-15
함정용 전자광학추적장비 종속추적 표적지향 개선에 관한 연구
( A Study on Dependency Tracking Target Aiming Systems Improvement of the Naval Electro Optical Tracking Systems )
심 보 현*, 조 희 진**, 김 장 은**
( Bo-hyun Shim
ⓒ, Hee-jin Jo, and Jang-eun Kim )
요 약
함정용 전자광학추적장비의 종속추적 표적지향 성능 개선을 위해 칼만 필터를 제안하였다. 전자광학추적장비의 추적기능 수 행 시 표적지향 성능 저하의 주요 요인인 전송 지연 및 측정 오차를 칼만 필터를 활용할 경우 최소화할 수 있는 장점이 있다.
칼만 필터를 활용하여 방위각, 고각 방향으로의 표적지향 오차가 감쇄됨을 확인하고 전자광학추적장비에 적용해봄으로써 전자 광학장비에서 빈번하게 발생하는 표적 추적 오차 개선 시스템으로 적합성을 제시하였다.
Abstract
The simulation programs with the kalman filter for the naval Electro Optical Tracking System(EOTS) is presented. We achieve that the dependency tracking aiming systems performance of EOTS can be enhanced by minimizing the target information error which including transfer delay and measurement. According to our experiment results, kalman filter can be used for various electro optical systems to eliminate error value.
Keywords: Electro Optical Tracking System, Dependency Tracking, Kalman Filte
Ⅰ. 서 론
함정에 탑재되는 전자광학추적장비(Electro Optical Tracking Systems, EOTS)는 해상 환경에서 함정의 관 측 및 추적센서로 운용되며, 지휘관 및 운용자가 전술 상황을 정확히 인식할 수 있도록 주간 영상과 열 영상 을 제공하여 전장 감시를 지원하고, 대공 및 대함 표적 에 대한 위치 및 속도 정보를 제공하는 핵심 장비이다.
또한 타 센서와 비교하여 표적에 대한 3차원의 정보를
Received ; January 8, 2015 Revised ; June 18, 2015 Accepted ; September 3, 2015
* 정회원, 국방기술품질원 대구센터 3팀
(Defense Agency for Technology and Quality)
** 정회원, 국방기술품질원 분석평가부 기술분석팀 (Defense Agency for Technology and Quality)
ⓒ Corresponding Author(E-mail: [email protected])
산출하여 제공할 수 있다는 점과 지정된 레이더 표적 방향으로 양상의 시선을 위치시킬 수 있다는 장점이 있 다.[1]
전자광학추적장비는 크게 센서구동장치 및 센서 장 착대 조립체로 구성된 전자광학 센서부와 센서구동장치 내부의 온도를 일정하게 유지시키는 온도조절부, 그리 고 전자광학 추적 제어장치 및 전원 공급기를 포함하는 전자광학 추적 제어부 및 안전스위치로 구성되어 있다.
전원 공급기는 함정으로부터 전원을 입력받아 정류전압 으로 변환하여 전자광학 추적 제어장치 및 센서구동장 치에 공급하게 된다. 전원을 공급받은 전자광학 추적 제어장치는 지휘무장통제체계로부터 운용 명령을 연동 단을 통해 입력받아 센서구동장치를 제어하고, 센서구 동장치로부터 수신된 상태정보를 바탕으로 전자광학추 적장비의 상태정보와 함 자세를 보상한 3차원 표적 정
보를 지휘무장 통제체계로 전달하게 된다. 또한 전자광 학 추적 제어장치는 주간영상 카메라 및 열영상센서로 부터 획득된 비디오 영상을 지휘무장 통제체계의 영상 분배 장치로 제공하며, 온도조절기는 함정으로부터 전 원을 입력받아 전자광학 추적 제어장치의 제어신호에 따라 센서구동장치에 질소를 순환시켜 센서구동장치의 온도를 일정 범위내로 유지시킨다.[2∼4]
전자광학추적장비에는 표적에 대한 추적을 정상적으 로 수행할 수 있도록 수동추적, 후방지향, 구역탐색, 종 속추적, 자동추적의 기능이 운용되고 있다. 이 중에서 종속추적은 전자광학추적장비의 핵심 기능 중 하나로 써, 표적에 대한 위치 정보를 획득하여 표적의 위치로 센서구동장치를 구동하여 추적을 실시하는 시스템이라 할 수 있다. 종속추적을 실행하게 되면 Fig. 1과 같이 체계장비로부터 오는 표적정보의 방향으로 센서구동장 치를 지향시키게 되는데 이는 최초 획득된 3차원 정보 를 2차원 정보로 전환한다는 특징이 있다.[5]
종속추적을 지속적으로 유지하기 위해서는 표적에 대한 정보를 실시간으로 보상하여 정확하고 안정되게 지향할 수 있도록 전자광학추적장비가 탑재된 함정의 플랫폼과 데이터 오차를 최소화하는 것이 필수적이다.
종속추적에 영향을 미치는 외란 요소에는 함정 구동에 따른 소요시간 및 오차, 표적정보 전송에 따른 갱신 오 차, 표적지향시 발생하는 시선제어오차, 타 센서와의 표 적 자료 오차 등이 포함되며 이를 보상하기 위해서는 식별된 표적정보에 대한 지연 값을 시간의 변화만큼 보 상하여 정확한 결과를 얻어낼 수 있는 시스템이 구축되 어야 한다.[6]
본 논문에서는 함정용 전자광학추적장비의 성능 향
그림 1. 전자광학추적장비 종속추적
Fig. 1. Dependency tracking schemetic of the EOTS systems.
상을 위해 종속 추적시 제반되는 주요 오차 요소들의 영향성을 검토하고, 시뮬레이션을 통해 위험 원인을 분 석하였다
Ⅱ. 칼만 필터 해석 및 종속추적 개선
1. 알고리즘 설계
가. 칼만 필터 정의
칼만 필터는 표적의 상태 예측 및 추정에 사용되는 필터로 함정에 탑재되는 탐색레이더, 추적레이더의 추 적용 필터, 사격통제 장비의 사격제원 산출 등에 사용 되며, 민간에서는 공항관제 분야, 항법장치, 선박제어 분야 등에 널리 사용되고 있다.
일반적으로 기동이 없고 단순히 직선운동만 하는 표 적의 경우에는 백색 가우시안 잡음 하에서 쉽게 추적할 수 있으나 실제 표적처럼 다양한 기동 특성을 갖는 비 선형 표적에 대한 모델링의 경우 발산문제가 필연적으 로 고려되어야 한다. 따라서 함정용 전자광학추적장비 가 쓰이는 해상 환경을 감안했을 때, 표적의 급격한 궤 도 혹은 속도 변경이나 파도나 바람에 의한 표적의 불 규칙한 운동 등과 같은 표적의 가속도 성능을 외란으로 모델링할 수 있는 비선형 칼만 필터 알고리즘을 활용하 는 것이 적합하다고 볼 수 있다.
나. 칼만 필터 전개
칼만 필터는 정보 분배량 법칙에 바탕을 두고 각각의 부 필터를 통해 필터링 되어진 공분산 행렬과 상태 변 수를 융합하여 최적의 결과 추정치를 얻는 복합 필터이 다. 이러한 형태의 칼만 필터는 각 센서에 할당된 부 필 터의 출력을 주 필터로 보내는 구조를 갖고 있는데 일 반적으로 분산계층 구조를 갖는 항법 시스템에 적합하 다. 주 필터에서 융합된 정보는 다시 부 필터에 재분배 되어 부 필터의 상태 변수 및 공분산 행렬의 초기화를 진행한다. 분배되는 정보량은 분배 계수 𝞬 에 의해 결 정되는데 분배 계수는 각 부 필터 시스템의 초기 오차 공분산 행렬에 대한 함수로 정의한다. 칼만 필터에서 공분산 행렬과 추정치의 융합 과정은 아래와 같이 표현 할 수 있다.
⋯
⋯
(1)
여기에서 각각의 부 필터 추정치 및 오차 공분산 행 렬은 필터링 되어진 추정치(Pm) 및 공분산 행렬(Xm) 을 의미한다. 재분배 과정은 아래와 같은 순서로 이루 어진다.① 오차 공분산 행렬 및 시스템 공정 잡음의 초기 값 을 각 부 필터에 분배한다.
(2)
② 융합된 추정치 및 공분산을 각 부 필터에 다음과 같이 분배한다.
(3)
③ 정보량 분배를 위한 계수들은 다음과 같은 조건을 만족한다.
≤
≤
(4)
정보 분배량의 계수 𝞬 i는 실제 구현 시에는 일반적 으로 𝞬 avg을 쓴다.
다. 표적추적에 대한 주요 오차
전자광학추적장비의 종속추적은 최초 지휘무장통제 체계에서 획득된 표적정보를 기준으로 플랫폼 위치(경 도/위도/고도) 및 플랫폼 자세(롤, 피치 등)를 고려하여 중앙제어카드로 전달하게 된다. 이후 중앙제어카드에서 는 좌표의 변환을 실시하여 전자광학추적장비로 정보를 전송하게 되며 이를 토대로 센서구동장치를 구동하여 추적을 실시하게 된다. 표적을 추적하는 과정에서 전자 광학추적장비는 함정의 기동이나 외란 요소에 의해 다 양한 오차들이 발생하게 되고, 이는 장비의 성능을 하 락시키는 요인이 된다. 이를 극복하기 위해서는 표적추 적에 영향을 미치는 주요 요소를 사전에 식별하여 보상 해주는 것이 필요하다.
Fig. 2는 종속추적 표적지향시 주요 오차를 식별하고
그림 2. 칼만 필터를 활용한 종속추적 시뮬레이션 시스 템
Fig. 2. Block diagram of target aiming systems simulation using kalman filter.
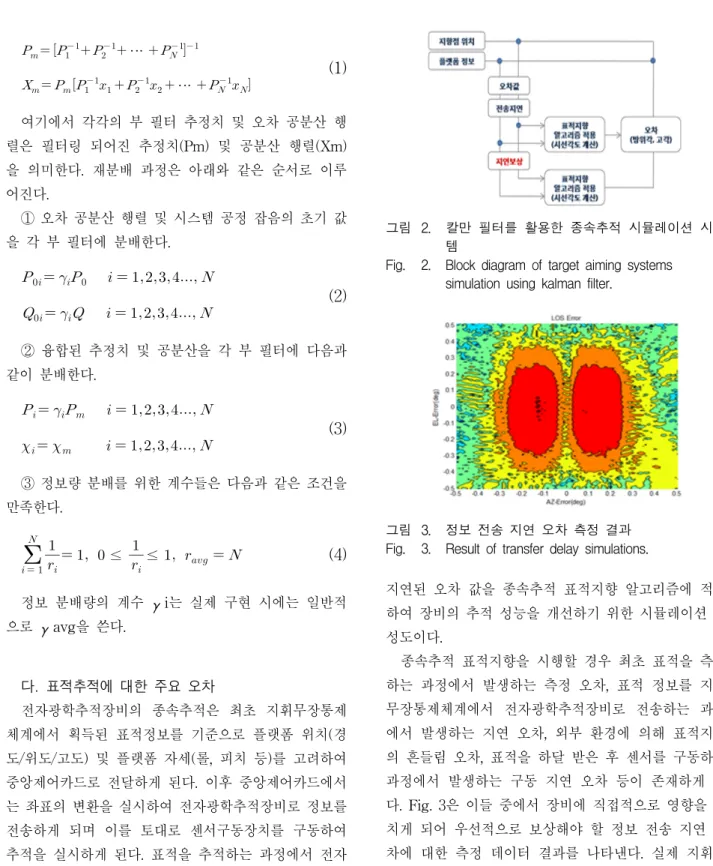
그림 3. 정보 전송 지연 오차 측정 결과 Fig. 3. Result of transfer delay simulations.
지연된 오차 값을 종속추적 표적지향 알고리즘에 적용 하여 장비의 추적 성능을 개선하기 위한 시뮬레이션 구 성도이다.
종속추적 표적지향을 시행할 경우 최초 표적을 측정 하는 과정에서 발생하는 측정 오차, 표적 정보를 지휘 무장통제체계에서 전자광학추적장비로 전송하는 과정 에서 발생하는 지연 오차, 외부 환경에 의해 표적지향 의 흔들림 오차, 표적을 하달 받은 후 센서를 구동하는 과정에서 발생하는 구동 지연 오차 등이 존재하게 된 다. Fig. 3은 이들 중에서 장비에 직접적으로 영향을 미 치게 되어 우선적으로 보상해야 할 정보 전송 지연 오 차에 대한 측정 데이터 결과를 나타낸다. 실제 지휘무 장통제체계에서 하달되는 표적 정보와 정보 전송지연 오차를 보상한 표적 정보를 방위각과 고각 방향으로 측 정을 실시해 본 결과, 표적에 대한 오차 수준 및 패턴이 가장 유사하게 나타남을 확인할 수 있다. 따라서 전송 지연 오차에 초점을 맞추고 종속추적 오차를 개선하는 것이 장비의 성능 개선을 통한 임무수행 능력을 향상시
킬 수 있음을 추측할 수 있다.
3. 종속추적 표적지향 오차 개선
가. 위치 및 속도 오차방정식
칼만 필터는 상태변수의 최적 추적치를 구하는 방법 으로 선형적이고 실제 값의 평균치와 추정 값 평균치 사이에 바이어스 오차가 없으며 상태변수와 추정된 상 태변수의 오차 분산을 최소로 하는 특성을 가지고 있 다. 이러한 칼만 필터는 가우시안 분포를 갖는 백색잡 음에 의하여 구동되는 선형시스템에 적용되는 경우 가 장 적합하다고 알려져 있다. 보통 추적 시스템에 칼만 필터를 적용하기 위해서는 비선형 항법 방정식을 선형 화시켜야 한다. 칼만 필터의 경우에는 각각의 부 시스 템들은 위치추적 시스템과 독립된 보조센서로 이루어진 구조가 되므로 필터를 구성하기 위해서는 위치추적 시 스템을 선형화하는 과정이 필요하다.
위치추적 시스템의 선형화를 위하여 시스템 모델을 구 성한 후, 칼만 필터를 구동하여야 한다. 본 논문에서는 오차 방정식 중 하나인 선형 섭동 방법을 통해 위치추적 시스템의 표적지향 알고리즘을 분석하고 적용하였다.
(5)
cos
tan
sec
sec
여기서 L, I, H는 각각 위도, 경도, 고도를 나타낸다.
Rm, Rt는 지구 반지름, Rmm, Rtt는 지구 반지름의 위도 에 대한 변화율로 식 (6)과 같이 정의할 수 있다.
sin
sin
sin
sin
(6)
속도 오차 방정식은 식 (7)과 같이 정리된다.
× ×
×
(7)
식 (7)에서 δvn은 좌표계에서의 속도 오차이고 Φ는 계산된 좌표계와 실제 좌표계 사이의 미소 각 오차로 자세 각 오차를 나타낸다. δfb는 가속도계 오차이고 δω
nie, δωnen은 각각 다음과 같다.
Ωsin Ωcos
(8)
나. 센서 오차방정식
관성 센서인 가속도계와 자이로(함정)의 오차로는 환 산계수 오차, 비 정렬 오차, 바이어스 오차 등이 있다.
이 중에서 불규칙 상수 바이어스와 평균이 0이고 가우 시안 정규 분포를 갖는 백색 잡음으로 모델링 한다. 이 를 정리하면 다음과 같다.
∇
(9)
여기에서 ᐁa, εg는 가속도계와 자이로의 불규칙 상수 오차이고, ωa와 ωg는 백색 잡음이다.
다. 표적지향 오차 알고리즘
칼만 필터 구성을 위한 시스템 모델은 위치, 속도 오 차 방정식과 관성 센서의 오차 방정식을 이용하여 다음 과 같이 상태 방정식으로 표현할 수 있다.
× ×
×
×
×
×
×
×
×
×
×
×
×
×
×
(10)
여기서 오차 상태 변수 x는 총 16차로 9차의 위치 오 차 변수 xf, 6차의 관선 센서 오차 변수 xa를 정의하면 다음과 같다.
∇ ∇ ∇
(11)
위치 시스템에서 사용하는 대표적인 비 관성 센서는 위치 정보를 제공하는 자이로와 속도 정보를 제공하는
속도계가 있다. 본 논문에서는 자이로를 통한 위치정보 속도계 모두 평균이 0이고 가우시안 정규 분포를 갖는 백색 잡음만 존재한다고 가정하였다. 이때 필터 구성을 위한 측정 식은 위치 보조 정보를 사용하는 경우와 보 조 정보를 사용하는 경우에 따라 다르게 구현된다.
× ×
(12)
속도계를 이용한 측정 식은 식 (13)과 같다.
× × ×
(13)
Fig. 4는 시간변화에 따라 표적의 위치정보 중에서
그림 4. 칼만 필터 적용에 따른 보상 전, 후 방위각 시 뮬레이션 측정 결과
Fig. 4. Simulation result for the azimuth data with true, delayed and filtered condition.
그림 5. 칼만 필터 적용에 따른 보상 전, 후 시간 지연 오차 측정 결과
Fig. 5. Simulation result for the time delay data with true, delayed and filtered condition.
방위각 측정 데이터를 시뮬레이션을 통해 비교한 결과 이다. 표적에 대한 방위각 정보는 일정하지 않으며 실 제 표적에 대한 표적 정보에 비해 전송지연 및 측정 오 차가 포함된 정보가 특정 구간에서 벗어남을 알 수 있 다. 반면 칼만 필터를 통해 보상되어진 정보는 평균적 으로 실제 표적 정보와 유사한 방위각 값을 나타내고 있음을 확인할 수 있다.
Fig. 5는 실제 표적 정보와 위치 보상 전 정보, 칼만 필터를 통해 보상된 정보를 시간 지연 오차에 따라 분
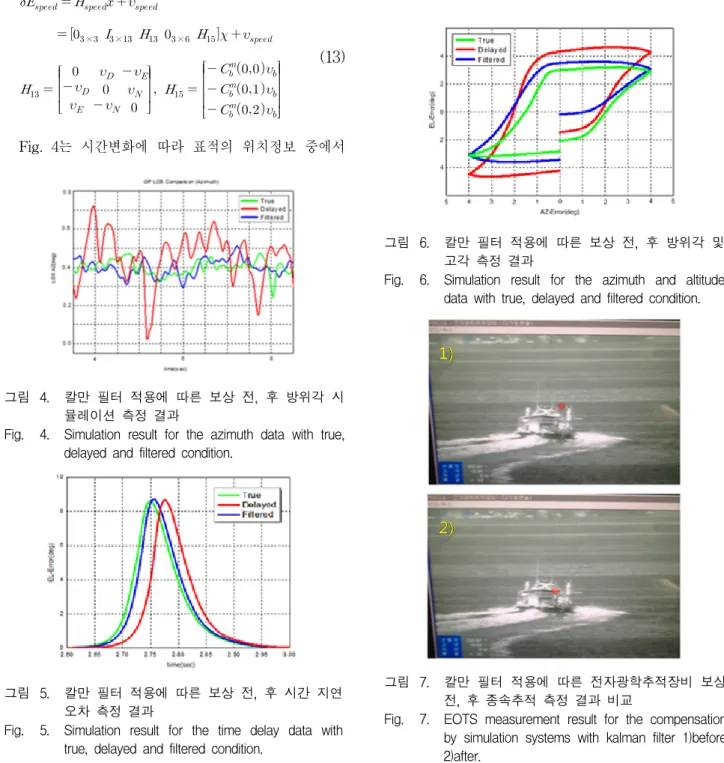
그림 6. 칼만 필터 적용에 따른 보상 전, 후 방위각 및 고각 측정 결과
Fig. 6. Simulation result for the azimuth and altitude data with true, delayed and filtered condition.
그림 7. 칼만 필터 적용에 따른 전자광학추적장비 보상 전, 후 종속추적 측정 결과 비교
Fig. 7. EOTS measurement result for the compensation by simulation systems with kalman filter 1)before 2)after.
석한 결과이다. 지휘무장통제체계로부터 획득한 실제 표적 정보와 비교하여 보상 전 정보의 경우 최대 50 ms 이상의 시간 지연 오차가 발생함을 알 수 있다. 반 면 칼만 필터를 통해 보상을 실시한 정보는 약 5 ms 이하로 오차가 최소화됨을 확인할 수 있다.
Fig. 6은 표적 정보에 대한 방위각과 고각 값을 칼만 필터를 적용한 시뮬레이션을 활용할 경우, 오차가 포함 된 정보와 비교하여 보상되어진 결과를 분석한 결과이 다. 전자광학추적장비의 종속추적을 수행하기 위해 획 득된 실제 표적 정보와 비교하여 보상을 실시하기 전 정보는 고각 방향으로 약 0.4˚, 방위각 방향으로 약 0.2˚
의 오차가 존재함을 알 수 있다. 반면 칼만 필터를 통해 정보지연 및 측정 오차를 보상해 줄 경우 고각 방향으 로 약 0.1˚, 방위각 방향으로 약 0.05 ˚로 오차를 상당히 감쇄시킬 수 있음을 확인할 수 있다.
Fig. 7은 칼만 필터가 적용된 시뮬레이션을 통해 검 증되어진 결과를 바탕으로 실제 함정용 전자광학추적장 비에 활용함으로써 전송 지연 및 측정 오차에 따른 종 속추적의 정확도 및 안정성 개선 여부를 확인해 본 결 과이다. 측정 결과, 보상을 실시하기 전 종속추적의 표 적지향 정확도는 일정 범위 내에 존재하지만 오차가 발 생하는 반면, 칼만 필터를 통해 보상을 실시할 경우, 전 송 지연 및 측정 오차 등이 보상되어 지휘무장통제체계 에서 하달된 실제 표적 정보와 유사한 값을 유지할 수 있음을 확인할 수 있다.
Ⅲ. 결 론
함정을 기동함에 있어 주요 센서로 사용되고 있는 전 자광학추적장비는 주간감시카메라를 통해 표적을 식별 하거나 열영상센서를 활용하여 눈으로 확인할 수 없는 파장대역의 정보를 획득하고 신호처리를 수행하며 영상 을 실시간으로 제공하는 시스템으로써 수동추적, 후방 지향, 구역탐색, 종속추적, 자동추적 등 다양한 운용모 드 기능이 탑재되어 있다. 종속추적은 센서로부터 표적 정보를 수집하여 해당 좌표로 센서구동장치를 구동하여 추적을 수행하는 필수 기능으로 표적에 대한 정보를 전 달하는 과정에서 발생하는 전송 지연 오차 및 측정 오 차와 장비 정렬, 시선제어 등 다양한 오차들이 산재되 어 있다.
본 논문에서는 장비의 성능에 영향을 미치는 오차요
소를 확인하고 각각의 영향을 분석하였다. 또한 주요 오차요소로 분류되어진 전송지연 및 측정 오차에 대한 해결 방안으로 칼만필터를 활용하여 방위각, 고각 방향 으로의 표적지향 오차가 상당히 감쇄함을 확인하였다.
더불어 전자광학추적장비에 본 시뮬레이션을 적용해봄 으로써 실제 종속 추적시 발생하게 되는 표적 추적 오 차 범위를 최소화하여 적합성을 제시하였다.
REFERENCES
[1] T. Kadir, A. Zisserman, and M. Brady, "An affine invariant salient region detector", Computer Vision - ECCV 2004, Vol. 3021, 2004.
[2] R. C. Warren, "A bayesian track-before-detect algorithm forIR point target detection", DSTO Aeronautical and Maritime Research Lab, February, 2002.
[3] So-hyun Kim, “Design of Auto coast Tracking Algorithm by the Prediction of Target Occlusion and its On-Based Implementation,”
The Korea Institute of Military Science and Technology, Vol. 12, no.3, pp. 354-359, June, 2009.
[4] Neal A. Carlson, “Federated Square Root Filter for Decentralized Parallel Processes," IEEE Transactions On Aerospace and Electronic System, Vol. 26, 1990.
저 자 소 개 심 보 현(정회원)
2011년 한국해양대학교 나노반도체 학과 학사 졸업
2013년 광주과학기술원 광공학응용 물리학과 석사 졸업 2013년∼국방기술품질원 연구원
<주관심분야 : 전자공학, 광학>
조 희 진(정회원)
2011년 전북대학교 반도체과학기 술학과 학사 졸업
2013년 광주과학기술원 신소재공 학과 석사 졸업
2013년∼국방기술품질원 연구원
<주관심분야 : 신소재공학>
김 장 은(정회원)
2011년 숭실대학교 정보통신전자 공학과 학사 졸업
2013년 숭실대학교 정보통신공학 과 석사 졸업
2013년∼국방기술품질원 연구원
<주관심분야 : 정보통신공학>