*정회원, 경민대학교 정보통신과
**정회원, 경민대학교 정보통신과
접수일자 2015년 11월 3일, 수정완료 2016년 1월 3일 게재확정일자 2016년 2월 5일
Received: 3 November, 2015 / Revised: 3 January, 2016 / Accepted: 5 February, 2016
**Corresponding Author: [email protected]
Dept. of Information & Communication, Kyungmin College, Korea http://dx.doi.org/10.7236/JIIBC.2016.16.1.163
JIIBC 2016-1-22
저수지 환경 감시를 위한 로봇 시스템 개발을 위한 연구
A Study on Robot System Development for Environmental monitoring of Reservoirs
신진섭
**, 이정일
*Jin-Seob Shin
**, Jeong-Ihll Lee
*요 약 농·수산물의 기본적인 품질향상을 위해서는 저수지의 효율적인 통합제어 관리시스템과 정확한 데이터가 절대 적으로 필요하며 이는 USN을 이용하여 비용과 시간을 절감할 수 있다. 이를 위하여 본 논문에서는 수상에서 환경을 계측하여 알려줄 수 있는 수상 로봇과 환경정보를 취합하여 통신하기 위한 네트워크를 설계하고 제작하였다. 기존의 모델에 비해 내구성이 뛰어나고 저렴한 모델을 설계하였으며 ZigBee와 TRS, Wi-Fi 및 LTE 망으로 연계가 가능하 도록 네트위크를 설계하였다. 또한 모의실험을 통하여 수상로봇의 탐사기능을 확인하였고 사용자 관리 프로그램을 제작 하였다.
Abstract
For the quality increase of agricultural and aquatic products, it is necessary to the efficient management system of integrated control and accurate data for improving the water quality of reservoirs. This may be using the USN save time and money. In this paper, the water surface robot was designed and manufactured for measuring and announcing the environment informations, and it’s network was constructed. The robot had more excellent durability and was more inexpensive than previous model. The network was designed considering connection with ZigBee, TRS, Wi-Fi or LTE network. Also the exploration function of the robot was confirmed by the simulation and the user interface was programmed.Key Words :
water surface robot, ZigBee, environmental monitoring, environment information, networkⅠ. 서 론
농·수산물의 품질향상을 위해서는 환경에 대한 객관 적이며 과학적인 데이터가 필요하며, 이에 따른 통합 제 어 관리가 병행되어야 하지만, 농가에서는 시설 투자비 에 대한 부담으로 인한 농·수산물의 가격 경쟁력을 약화 시키게 된다. 그러므로 보다 저비용으로 투자 및 관리가 가능한 시스템의 개발이 필요하다. 그리고 지구온난화에
따른 기상이변과 기상재해가 빈번해지고 강도가 커짐에 따라 유엔식량농업기구(FAO)에 의해 정보기술(IT), 생 명공학기술(BT), 나노기술(NT) 등 첨단기술을 기초로 하는 기후변화 대응 지능형 농업 방안이 제안되었다.
[1]u-IT 기술 접목 시 발생가능한 문제점을 예상하여 안
정된 시스템을 도입하고 구체적이고 실효성 높은 비즈니
스 모델을 개발하여야 하며, 코드, 연계, 서비스 등 표준
화 · 체계화 기반을 마련하고 상호 공유 체계 마련이 필
요하다. 그러므로 1차 산업 뿐 아니라 2, 3차 산업까지 아 우르는 사업 전반의 경험과 사업 모델을 운영한 경험이 있는 업체가 이를 추진하거나 여러 산업체가 산업체계를 뛰어 넘어 협력 체계를 구축하여야 한다. 농·수산물뿐만 아니라 생활환경의 경우도 고려해야 한다. 2005년 환경 지속성지수 평가에서 한국은 146개국 중 122위를, 2010 년 136(35.1점)위였다.
[2]환경오염이 국민생활에 미칠 영 향을 최소화하기 위하여 대기, 수질, 토양 등 개별 환경 대상을 통합적으로 관리할 시스템이 절대적으로 필요하 다. 이상 기후로 인해 정도가 심해지고 있는 홍수와 갈 수가 반복되는 현재 상황에서 가장 중요한 환경자원 중 하나인 수자원 대책은 정부의 중요 정책 중 하나이다. 이 중 인위적으로 물을 모아 사용할 수 있도록 하는 저수지 는 농업용 등으로 사용되는 중요한 시설이라 할 수 있다.
저수지의 안전대책과 수질관리는 대단히 중요하다. 특 히 국내에서 생산되는 쌀들은 농업용수를 끼고 발달하였 으며 맑고 깨끗한 저수지와 지하수를 농업용수로 공급받 기 때문에 정갈한 맛을 가진다고 알려져 있다. 하지만 한국농어촌공사가 관리하고 있는 전국 저수지 3,333개 중 안전진단을 실시하는 1,545개 저수지의 95.4%가 안전 등급 C나 D등급으로 나타나 개보수가 시급한 것으로 나
타났다.
[3]그러므로 국민의 여가를 활용하며 먹거리 생
산의 기본이 되는 저수지의 수질 및 안전 대책은 중요한 문제이나 대책은 그렇지 못하다. 전국적으로 총 3000개 가 넘는 저수지를 한정된 인원으로 관리하기 힘들고 문 제가 있어도 파악하기에는 많은 예산과 인력이 필요하다 고 할 수 있겠다.
본 연구에서는 인력과 예산의 절감을 위해 수상 로봇 을 저수지에서 환경과 안전을 모니터링하고 환경 개선 작업을 할 수 있도록 하고자 한다. 수상 로봇은 레이더 등 각종 센서를 장착하여 저수지 연안과 중심의 안전 상 태와 수질 및 수자원 환경을 모니터링하고 정보를 중앙 관제 센터의 데이터베이스로 전송하는 임무를 수행하게 된다. 수질 오염 및 폐기물의 유무를 비롯하여 연안의 안 전도 등을 측정하는 센서단에서 검출한 정보를 무선으로 전송받아 중앙관제 서버로 전달할 장비를 개발하여 탑재 할 예정인데 이 장비는 USN(Ubiquitous sensor network)의 중추를 이루게 될 중요한 장비이다.
[4][5]수상 로봇을 복수로 구성되어 여러 임무를 수행하게 할 예정 인데, 침입이나 환경을 감시를 전문으로 하는 로봇 외에 최근 갈수기에 문제가 되었던 녹조류 등의 환경 처리 임
무를 수행하는 로봇도 추가할 예정이다. 자동 여과 장치 를 부착하여 녹조 및 쓰레기들을 처리함으로 수질을 보 존하고 또 폐기물들을 연안으로 후송해야 하므로 이를 위해서는 별도의 로봇 또는 장비도 필요하다.
[6]본 연구에서 제안할 3종의 수상 로봇은 일반차량으로 운송 가능하게 제작할 예정이므로 적은 인원과 예산으로 농업용수원이며 레저용으로 운용되는 국내의 저수지에 서 활용될 수 있을 것으로 예상된다.
Ⅱ. 시스템 설계
수상 로봇은 해외에서 주로 탐지 목적으로 사용되는 데 무인으로 해양이나 기타 수자원의 다양한 환경을 측 정하는 과학적 목적으로 사용이 된다. 주로 염분, 물 온 도, 파도, 날씨, 형광, 용존산소량 등을 측정하며 측정한 데이터를 수시로 위성 및 기타 통신망을 사용하여 전송 하며, 장시간 운용이 가능하도록 친환경 전력시스템과 저전력 시스템을 적용하여 설계 제작한다.
정부 또는 국방 차원으로 항구 보안, 교통안전, 해양 지도 인식, 구조대, 해양 감시 및 정찰과 연안 국가들의 독점적 경제수역 모니터링, 해양 지도 인식 등의 목적으 로 운용된다. 과학 및 환경 분야에서는 기후과학, 해양학, 기상학, 해일경보, 해양보호지역 모니터링, 해양 포유류 관찰 등에 활용되고 있다. 특히 태풍, 해일은 연안 주민을 위협하는 요인이므로 이를 탐사하기 위해 무인 감시체를 활용하고 있다. 게다가 해산물을 관리하거나 보호할 수 있고, 해양관광 경제에도 기여하고 있다. 상업 또는 산업 용으로 수산 자원 관리, 양식업, 천연자원관리, 오염감지 등을 탐지할 목적으로 운용하고 있다.
본 연구에서 설계하고 제작한 수상 로봇은 센서의 탈
부착이 가능한 형태로 담수 및 해안에서 작동할 수 있는
구조로 고효율의 모터를 사용하였다. 또한 수상 로봇의
작동 불능 상태를 대비하여 유사시에 사용할 견인용 구
조 Boat도 설계 제작하였다. 수상 로봇은 효율을 높이기
위해 경량으로 제작되어야 한다. 그래서 FRP(Fiber
Reinforced Plastics)와 PE(Poly Ethylene)로 각각 제작
하였다. FRP는 합성수지에 유리섬유 등을 첨가하여 보
강한 신소재로 강도가 매우 높고 가볍다. 경량임에도 내
식성이 강하고 또한 성형성(成型性) 등이 뛰어난 고성능
ㆍ고기능성 재료이기 때문에 많은 곳에서 사용하고 있다.
그림 1. 제작된 수상 로봇
Fig. 1. The water surface robot(manufactured)
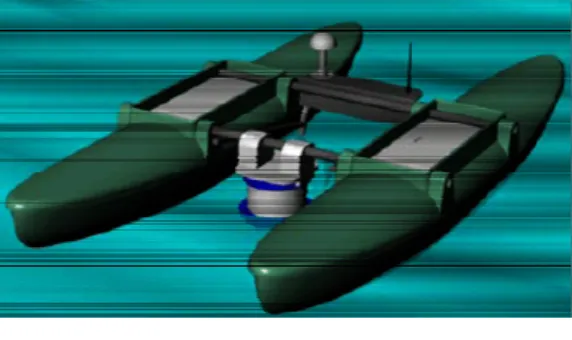
그림 2. 설계도(조감도)
Fig. 2. The design drawing(bird's-eye view)
5kg 정도의 장비 및 센서를 탑재한 상태에서 안정적으로
수상임무를 수행할 수 있도록 부상체인 Float는 2조로 구 성되도록 설계 제작하였다. BLDC(Brushless DC) 모터 를 채택하여 고효율을 낼 수 있도록 제작하였고 전원은 친환경 배터리를 사용하였다. 수상 로봇의 총무게는 약 35kg이고 차량 운반이 가능하도록 전장 140cm로 설계 제작하였으며, 탑재된 장비의 안정도를 높이기 위해 폭 은 85cm, 높이는 46cm로 제작하였다. 센서를 통하여 획 득된 데이터 송출을 위해 무선 통신 망을 설치하였으며 원격 제어가 가능하도록 설계 제작하였다.
Ⅲ. 시스템 제작
1. 설계 및 제작
1차 모델의 재질은 Sea Boat 자체의 중량을 줄이기 위 해 초경량 소재인 FRP를 사용하였다. 전술한대로 가볍 지만 강도가 매우 높고 내식성도 강하며 성형성도 뛰어 나다. 그림 1에서 볼 수 있듯이 부상체인 Float는 주 부상 체 2 개를 1 쌍으로 한 모델을 선택하여 제작하였다. 주 부상체 1개와 부 부상체를 좌우에 배치한 모델은 속도가 빠르고 회전 반경이 적고 움직임이 자유롭다는 장점이 있지만 적재 중량이 클 경우 안정도가 떨어진다는 단점 이 지적되었다.
구조적인 장·단점을 최대한 활용하고자 주 부상체 2개 가 1쌍으로 1조가 되는 모델은 탐사선으로 활용하고 추 가로 제작한 주 부상체 1개와 부 부상체 2개가 1조로 구 성된 모델은 빠른 속도(약 50kont 이상, 90~100km/h)와 5 마력 이상의 힘을 낼 수 있는 점을 이용하여 탐사선에 이 상이 생길 때 투입해서 견인해 올 수 있도록 구조선으로 활용하기 위해 제작하였다.
탐사선의 전자 모듈 탑재 박스에 경광등을 설치하여 인근에서 작업 중인 다른 배나 작업자에게 경고를 할 수 있도록 하였고 원거리에서도 탐사선의 상태를 1차적으로 육안 판별을 할 수 있도록 하였다.
탑재되는 전자 모듈은 박스의 무게를 포함하여 적재 적정 중량인 5kg 내외가 되도록 하였다. 구동은 주 부상 체 2조에 각각 수중모터를 탑재하여 운용하도록 하였다.
구조선은 주 부상체 한 개와 부 부상체 2개가 한 조로 이 루어져 있으며 1개의 모터로 구동되도록 하였다. 현재 구 조선은 준비단계이며 이후 견인 장비 및 구조 장치를 탑
재할 예정이다. 2차 모델은 생산원가는 FRP보다 개발 단가는 사출성형과정을 거치기에 더 높지만 일단 생산이 되면 더 저렴한 PE 재질로 설계하였다. 또한 물리적인 크기는 현재 카약이나 카누 등의 보트에서 보조 부상체 로 사용되는 규격을 그대로 적용하였기에 쉽게 부상체를 구할 수 있다는 장점이 생기게 된다.
그림 2는 PE 재질로 되어있는 2차 모델의 설계도를 3D 조감도로 표현한 사진이다. 작업 중인 모습으로 재현 하였다. 그림에서 볼 수 있듯이 부상체의 중앙에 가로 지 지대를 설치하여 장비를 설치할 수 있도록 하였다.
그림 3은 PE 모델의 제작된 형태로 내구성은 FRP보 다 뛰어나고 부력도 훨씬 좋아 적재 중량을 50%이상 높 일수 있음을 실험을 통하여 확인하였다. 전진을 하는 전 면부의 부상체는 유선형으로 설계하여 물살에 의한 마찰 을 최소화함과 동시에 전진시 안정도에 방해가 되는 피 칭(pithcing)을 막을 수 있도록 유선형으로 설계하였다.
실제 주행 시험에서도 앞뒤로 흔들리는 피칭이 거의 없
음을 확인할 수 있었다. 그에 반해 후면부는 약간 길게
설계하였다. 날카롭게 설계하여 뒤로 밀려진 물살과 닿
그림 3. PE 모델(후면부)
Fig. 3. The PE model(Back Side)
는 면적을 최소화하였고 그로인해 역와류에 의한 방해가 최소화되었다. 그리고 전진 및 후진을 할 때, 안정도를 높이기 위해서 장비가 있는 중앙지점에서 부터의 길이가 다르게 설계되었다. 후면부가 약간 길게 설계하였는데 이유는 전면과 후면의 무게를 같게 만들기 위해서이다.
전면부 대 후면부의 무게는 1:1로 설계되었다.
장비적재함은 그림에서 볼 수 있듯이 착탈이 쉽고 평 소에도 쉽게 들고 이동할 수 있도록 가방의 형태로 설계 하였다. 내부는 배터리, 드라이브 콘트롤 장비, 각종 센서 와 통신장비 등이 들어가며 100% 방수가 되도록 하였다.
2. 구동
구동부는 모터와 스크류로 구성되어 있다. 모터는 그 림 7에서 볼 수 있다. 직접 제작하였고 최고의 성능을 가 진 모터라 할 수 있다. 적재 중량도 거의 100kg을 견딜 수 있도록 설계하였다. 스크류는 수중에서 이물질에 의 한 타격에 손상되지 않도록 보호장치를 간단하게 탈부착 할 수 있도록 설계하였으며 이 보호장치를 제거하면 출 력이 15%정도 증가하게 된다. 스크류는 후진을 고려하지 않고 설계하였으며 메탈 플라스틱 재질을 사용하였다.
금속의 경우에는 충격에 강하나 휘게되는 경우가 있어 그럴 경우 제어가 불안정해지기 때문에 휨이 적은 메탈 플라스틱을 적용하고 보호장치를 추가하도록 하는 설계 를 선택하였다.
모터는 12V 전압을 사용하며 13암페어를 사용하도록 설계하였다. 추진력는 156와트이고, 출력은 67와트이다.
발진력은 17.5 파운드이며 2.1kg의 중량을 가지고 있다.
직접 원격에서 무선 조정으로 움직이게 되어 있으며 추 후 GPS를 사용하여 자동 항법을 적용할 계획을 하고 있 다. 모터 자체는 전후진이 가능하며 조정 장치는 키 또는
노로도 가능하도록 설계하였다. 수냉식을 적용하였으며 쉽게 탈착이 가능한 브라켓을 사용하여 본체에 부착된다.
또한 모터는 해수 및 담수에서 모두 사용 가능하다. 모 터 및 스크류 및 탈부착장치로 모터의 외곽을 감싸는 부 분도 뒤쪽에서 생기는 와류에 의한 추진방해를 막기 위 해 유선형으로 설계 제작하였다.
3. 제어
구동장치는 연속으로 180암페어를 공급할 수 있으며 No Limites Sensor/Sensorless의 형태로 모터를 지원한 다. DC모터와도 100% 호환되며 입력 전압의 범위는 6.0V-25V이고 Lithium 2-6Cell과 Nicd/MH 6-18Cell 전 지를 지원한다. 시스템 임피던스는 0.33㏁ 변속기는 스위 칭 형태이고 5.8V/4A @25.2V이다. 크기는 55 X 42 X 23(35 With Fan)mm이며 전력 공급부를 포함하고 있다.
무게는 58g이다. 온도가 높거나 전압이 낮거나 신호를 놓 치거나 잡음이 심할 경우 보호회로를 장착하여 모터를 보호하도록 설계하였다. 자동으로 모터를 점검하고 모터 를 점검할 수 있도록 하였으며 OVER_DRIVE (Sensorless Mode)와 HYPER_DRIVE (Sensor Mode)를 할 수 있도록 구현하였다.
Ⅳ. 실험 및 결과
그림 4에서 보는 것과 같이 수상 로봇은 각종 운전 시 험운행을 우수하게 마쳤으며 저수지의 벽과 충돌 시에도 우수한 결과를 보였다. 전후진이 가능하여 환경개선 작 업에서도 우수한 성능을 보일 것으로 생각하고 있다.
그림 4. 시험 운행
Fig. 4. The Test running
그림 5. 원격 운행
Fig. 5. The remote controlling
그림 6. 시스템 흐름도
Fig. 6. The flow chart of the system
그림 5는 원격 운행을 하는 모습이다. 원거리에서 동 작을 하며 주어진 탐사임무를 수행하고 있는 사진으로 망원 CCTV로 촬영된 장면이다. 통신은 ZigBee를 사용 하였다. 주변에 설치된 센서들에서 보내는 환경정보를 취합하여 Wi-Fi를 통하여 데이터베이스로 보내는 역할 을 한다. 방수는 물론 큰 압력이나 충격에도 견딜 수 있 다. 센서는 최대 255개까지 확장할 수 있으며, 최대 전송 거리는 2km이다. 추후 TRS나 LTE 모뎀을 이용하여 전 송거리를 늘이고 신뢰성을 확보하는 방안을 적용할 예정 이다. 특히 Web-Cam이나 레이더 센서를 장착했을 때에 는 전송량의 한계가 있어 기초자료를 얻기 위해서나 보 조 네트워크로 적용할 예정이다.
[7]그림 6은 감시 및 대응 시스템의 흐름도이다. 외부 환 경변화를 취득하여 정보를 파악하고 간단한 응급대처를 하도록 하였고, 이상 징후가 포착되면 분석 시스템에 준 비된 처치를 하며 관리자에게 보고하도록 되어 있다. 이 상 상태가 지속되면 관리자의 지시를 받아 최종 지시사 항을 수행하도록 하는 시스템으로 본 시스템에서 적용하 고 있는 통합 관리 시스템이다.
그림 7. 관리 프로그램
Fig. 7. The management program
그림 7은 서비스 시스템에서 연구소, 관제 센터 같은 원격지에 전송될 서비스 화면이다. 이 서비스 화면에서 구동체의 위치를 파악할 수 있으며 영상 및 기타 정보를 확인할 수 있다.
Ⅴ. 결 론
본 논문에서는 인력과 예산의 절감을 위해 수상 로봇 을 이용하여 저수지에서 환경과 안전을 모니터링하고 환 경 개선 작업을 할 수 있도록 하였다.
4대강 사업으로 인하여 하천과 강, 그리고 그 유역의 정비 및 환경문제가 많이 대두되었다. 환경을 유지하기 위해서 가장 중요한 것은 적극적 예방이며 이를 위해 대 한민국의 우수한 IT 기술을 활용하고자 한다. 이를 위해 새로운 USN을 구축할 수 있는 새로운 수상모델을 제시 하였으며 그 모델을 설계하고 제작하여 모의실험을 수행 하였다. 또한 기존의 USN에서 사용하는 네트워크를 확 장하여 ZigBee와 Wi-Fi 및 TRS를 연계할 수 있는 시스 템으로 구축하였다.
수자원 관리는 국민의 건강에 직결되는 문제이며, 우 수한 농산물을 얻기 위한 기본이다. 국민의 건강과 농민 들의 걱정을 덜 수 있으며, 잘 가꾼 저수지 주변은 많은 국민들에게 쾌락한 환경을 즐기는 건전한 여가활동의 장 으로 활용될 것이다.
우수한 IT기술과 녹색환경산업이 시너지 효과를 일으
키는 사업으로 연계 사업을 발전시키는 선도 기술이 될
것이며, 그동안 대한민국이 투자한 우수한 IT, 녹색 그리
고 융복합 산업기술로 많은 개도국에 모범이 되어 새로
운 수출산업으로 자리매김할 수 있을 것이다.
References
[1] C. G. Kim, Famers Newspaper 2011. 02. 14 [2] SERI Focus, vol. 121, The establish of the
integrated convenience system for public environment to have a direct influence on a life environment
[3] Korea Rural Community Corporation, The maintenance present condition of all reservoirs in the Korea after 2000
[4] Ministry of Information and Communication, The realization of u-Blue city based on IPv6 and trial services, National Information Society Agency, 2007
[5] G. O. Park, A study on the implementation plan of Gyongsangnam-Do's U-City, Changwon univ., 2008
[6] G. S. Kim, A Study on Posture Control and Location Route of Autonomous Navigation Robot for Monitoring Water Quality Environment, Chosun Univ, 2010
[7] Jin-Seob Shin, Jeong-Ihll Lee, Design and Construction of Farm Management System by U-IT, (JIIBC). vol.12, No.6, 2012.12
[8] H. S. Park, Y. D. Kim, M. J. Kim, H. K. Oh, I. C.
Kim, Implementation of An Intelligent Surveillance System Using Smart Phones and Mobile Robots, The 35th Korea Information Processing Society General Meeting and Spring Conference, vol.18-1 pp319-322, 2011.5
저자 소개
신 진 섭(정회원)
∙1991년 : 경희대학교대학원 전자공학 과(공학석사)
∙1997년 : 경희대학교대학원 전자공학 과(공학박사)
∙2016년 : 현재 경민대학교 정보통신과 부교수
<주관심분야 :정보통신시스템, 초음파 & 초고주파>
이 정 일(정회원)
∙제8권 6호참조
∙2016년 : 현재 경민대학교 정보통신과 정교수
<주관심분야 : 이동무선통신, 유비쿼 터스>