http://dx.doi.org/10.12673/jant.2015.19.5.363
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 15 September 2015; Revised 22 September 2015 Accepted (Publication) 13 October 2015 (30 October 2015)
*Corresponding Author; Jiwon Kim
Tel: +82-2-300-2146 E-mail: [email protected]
J. Adv. Navig. Technol. 19(5): 363-369, Oct. 2015
잠수함 발사 탄도미사일 탐지를 위한 해상 센서플랫폼의 배치에 관한 연구
A Study on the Deployment of a Sea Based Sensor Platform for the Detection of a SLBM
김 지 원
1*· 권 용 수
1· 김 남 기
2· 김 동 민
1· 박 영 한
11국방대학교 무기체계학과
2합동군사대학교
Jiwon Kim
1*· Yong Soo Kwon
1· Namgi Kim
2· Dong Min Kim
1· Young Han Park
11Department of Weapon Systems, Korea National Defense University, Gyeonggi-do 10544, Korea
2Joint & Combined Opr' Department, Joint Forces Military Academy, Daejoen 34059, Korea
[요 약]
본 논문은 잠수함 발사 탄도미사일(SLBM) 탐지를 위한 해상 센서플랫폼의 배치에 관한 연구이다. 최근 북한은 SLBM의 수중 사출시험을 실시하였으며 이는 국제사회에 심각한 안보 위협이 되고 있다. 이러한 위협에 효과적으로 대응하기 위해 기동이 가능 한 해상 센서플랫폼은 SLBM의 탐지 가능성이 높은 위치에 배치되어야 한다. 그러나 전형적인 레이더 센서체계의 최대탐지거리 특성은 표적의 비행궤적과 레이더 반사 단면적(RCS)에 따라 달라진다. 이러한 관점에서 본 연구는 SLBM의 전술적 특성에 따른 비행궤적을 분석하고, RCS를 계산하였다. 또한 센서 플랫폼의 위치에 따른 탐지 시간을 분석하여 효과적으로 SLBM을 탐지할 수 있는 해상 센서 플랫폼의 위치를 제시하였다.
[Abstract]
This paper describes deployment of a sea based sensor platform for the detection of a submarine launched ballistic missile (SLBM).
Recently, North Korea successfully conducted the underwater launching test of the SLBM, which will seriously threaten the global security. To defend these threats successfully, a sensor platform of the ballistic missile defense (BMD) should be deployed in the area of high detection probability of the missile. The maximum detection range characteristics of the typical radar sensor system, however, depend on the radar cross section (RCS) and flight trajectories of the target. In this point of view, this work analyzed the flight trajectories based on the tactics and calculated the RCS of the SLBM. In addition, sea based sensor platform position is proposed from the analysis of the detection time.
Key word : Sensor deployment, Submarine launched ballistic missile, Radar cross section, Ballistic missile defense.
그림 1. 탄도미사일의 비행궤적 Fig. 1. Ballistic missile trajectories.
payload mass 650 kg
total mass 14250 kg
burn time 128 sec
specific impulse 263 sec
표 1. SLBM 입력파라미터
Table 1. SLBM input parameters.
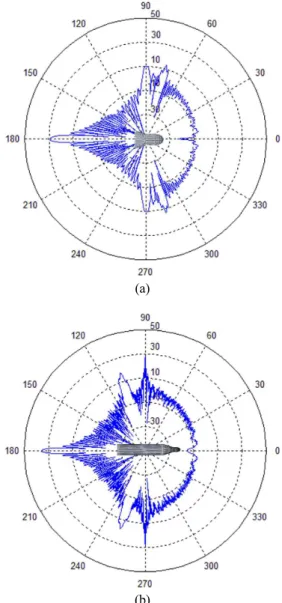
그림 2. SLBM 비행궤적 Fig. 2. SLBM trajectories.
Ⅰ. 서 론
북한은 지난 30여 년간 사거리 3,000~4000 km급의 무수단 미사일을 포함한 다양한 종류의 탄도미사일을 개발해 왔으며, 이는 우리나라를 포함한 전 세계적인 안보 위협이 되고 있다.
특히 북한이 최근 수중 사출시험을 실시한 잠수함 발사 탄도미 사일 (SLBM; submarine launched ballistic missile)은 발사 위치 와 징후가 사전에 노출되지 않는 특성으로 인해 더욱 심각한 위 협요소로 작용하고 있다. 한편 우리나라는 북한의 탄도미사일 위협에 대응하기 위해 한국적 미사일 방어체계 (KAMD; Korea air and missile defense)를 구축하고 있으며, SPY-1D 위상배열 레이더를 탑재한 이지스 구축함은 북한의 탄도미사일을 해상 에서 탐지하는 핵심적인 임무를 담당하고 있다.
탄도미사일은 크기가 작고 속도의 변화가 크다. 특히 레이더 의 탐지에 결정적인 영향을 미치는 레이더 반사 단면적 (RCS;
radar cross section)이 상당히 작고, 레이더 송신파의 입사각에 따라 지속적으로 변하기 때문에 탐지와 요격이 어렵다 [1].
이러한 관점에서 본 논문은 북한의 SLBM 탐지를 위한 해상 센서플랫폼의 배진위치에 대해 분석하였다. SLBM의 전술적 특성에 따른 비행궤적을 분석하고 RCS를 계산하였다. 또한 센 서플랫폼의 위치에 따른 탐지 시간을 분석하여 SLBM을 가장 오래 탐지할 수 있는 해상 센서플랫폼의 배진위치를 제시하였 다. 이는 향후 북한의 탄도미사일을 효과적으로 탐지하기 위한 해상 센서플랫폼의 최적 배진위치 판단 시 기초 자료로 사용될 수 있을 것이다.
Ⅱ. SLBM의 비행궤적과 레이더 반사 단면적 2-1 SLBM의 발사 방식 판단
일반적인 탄도미사일의 비행궤적은 크게 최소에너지 궤적 (MET; minimum energy trajectory), 로프트 궤적 (LT; lofted trajectory) 및 디프레스 궤적 (DT; depressed trajectory)의 세 가 지 형태로 분류된다.
MET는 탄도미사일이 보유한 에너지로 비행할 수 있는 최대 사거리를 가지는 궤적이며, LT는 탄도미사일의 발사각을 높여 MET보다 높은 정점(apogee)을 가지며, 비행시간이 긴 궤적이 다. 반대로 DT는 발사 각도를 낮춰 MET보다 낮은 정점을 나타
내고 비행시간이 짧은 궤적이다. 이러한 LT 및 DT는 탄도미사 일의 사거리를 조절하기 위해 사용되는 방법이며, 각각 상이한 특성을 나타내기 때문에 탄도미사일 운용자의 전술적 목적에 따라 적절한 방법을 선택하게 된다.
한편 SLBM의 발사 플랫폼인 잠수함은 전략무기로서 은밀 성이 핵심인 무기체계이다. 잠수함은 생존성의 확보와 작전의 성공을 위해 노출을 최소화 하여 은밀성을 확보한다. 따라서 잠 수함에서 발사되는 SLBM은 비행시간을 감소시키고, 피탐 가 능성을 최소화 할 수 있도록, 비행시간이 짧고 저고도로 비행하 는 DT 방식으로 발사될 가능성이 상당히 높다[2].
2-2 SLBM의 비행궤적
SLBM의 비행궤적은 추력, 중력 및 항력 등의 영향을 받으 며, 입력 파라미터에 따라 결정된다. 본 연구의 SLBM의 비행 궤적 분석은 국방대학교에서 개발된 탄도미사일 궤적특성 해 석 모델[3]이 사용되었다. 이 모델은 검증과정을 통해 지속적으 로 보완되었으며, 실제의 탄도미사일 궤적특성과의 비교 분석 을 통해 신뢰성이 입증되었다[1],[4]~[6]. 시뮬레이션 입력 파라 미터는 표 1과 같으며, 일반에 공개된 SLBM(R-27)의 제원값 [7],[8]을 적용하였다.
SLBM 비행궤적은 그림 2와 같으며, 동일한 제원의 SLBM을 MET와 DT로 발사하여 최대사거리 및 1000 km를 비행하도록 시뮬레이션 하였다. SLBM이 MET 궤적으로 비행할 때 사거리는 2,445 km이며 비행시간은 893초이고 정점고도는 633 km이다.
DT로 사거리를 단축하여 비행할 경우 1000 km를 비행하는데
(a)
(b)
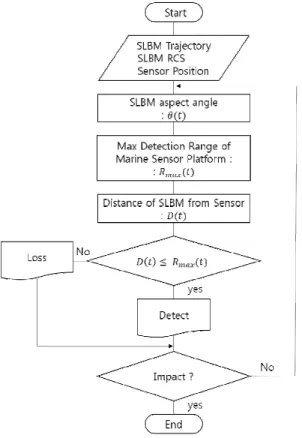
그림 4. SLBM 레이더 반사 단면적 (a: 탄두, b: 부스터 + 탄두) Fig. 4. SLBM RCS (a: warhead b: booster + warhead).
a)
Booster Warhead
b)
그림 3. SLBM 형상 (a: 실제, b: 입력모델) Fig. 3. SLBM configuration (a: real, b: model).
소요되는 시간은 391초이며 정점고도는 77 km로, MET에 비해 사거리가 40.9 % 로 감소되었을 때 정점고도와 비행시간은 각 각 61.8 %, 8.6 % 로 단축됨을 확인할 수 있다.
2-3 레이더 반사 단면적(RCS)
RCS는 레이더가 표적을 탐지하는데 있어 중요한 파라미터 로 레이더-표적간의 거리에는 무관하며, 표적의 형상과 레이더 의 운용주파수와 관련이 있다. RCS와 레이더의 최대 탐지거리 관계는 식 (1)과 같다.
max
min
(1)여기서 , , , , ,
, , , 및 min은 각각 송 신출력, 송신이득, 수신이득, RCS, 파장, 손실, 신호처리이득, 열잡음전력 (thermal noise power) 및 최소 신호대 잡음비를 의 미한다. 식 (1)에서 RCS를 제외한 나머지 변수들을 일정하다고 가정하면 레이더의 최대탐지거리(max)는 RCS의 1/4 승에 비 례하게 된다.한편 RCS는 실제 표적에 레이더 전파를 조사하여 측정하는 것이 가장 정확할 것이나, 여기서는 물리광학 (physical optics) 기법을 적용한 RCS를 예측 도구인 POFACET Ver. 4.2를 사용 하여 SLBM의 RCS를 계산하였다. 또한 SLBM은 부스터의 연 소가 종료된 후 탄두와 부스터가 분리된다. 따라서 보다 정확한 SLBM 탐지 시뮬레이션을 위해 부스터가 분리되기 전ㆍ후의 RCS를 각각 계산하였다. RCS 계산을 위해 작성한 형상모델과 RCS 계산 결과는 각각 그림 3 및 그림 4와 같다.
그림 4는 레이더의 전파가 SLBM에 입사되는 각도인 측면각 (aspect angle)에 따른 RCS 크기를 나타내고 있으며, RCS의 단 위는 dBsm( decibel per square meter)이 사용되었다. 또한 RCS 계산에 사용된 레이더의 운용주파수는 이지스 구축함에 탑재된 SPY-1D 레이더의 주파수 대역인 S-Band (2~4GHz)의 중간값인 3.0GHz[1]를 사용하였다.
측면각에 따른 전반적인 RCS 경향은 레이더 전파를 정측면 에서 받는 경우(측면각 90°, 270°)와 정후면에서 받는 경우(측
면각 180°)에 커지며, 정면에서 받는 경우(측면각 0°)에 작아짐 을 알 수 있다. 이는 레이더 전파를 반사하는 상대적인 면적의 차이에서 기인한다.
또한 SLBM 탄두만의 RCS(그림 4a)는 부스터가 부착된 SLBM의 RCS(그림 4b)보다 측면각 90° ~ 270° 구간에서 작아 진 것을 알 수 있다. 이는 부스터가 분리되어 SLBM의 전체적 인 형상이 작아졌기 때문이다.
Ⅲ. SLBM 탐지를 위한 효과적인 해상 센서플랫 폼의 배치
3-1 센서플랫폼 위치에 따른 SLBM 탐지시간
그림 5. 해상 센서플랫폼의 SLBM 탐지 알고리즘 Fig. 5. Algorithm for SLBM detection of sea based
sensor platform.
trajectory impact flight time [sec] range [km] apogee [km]
DT 1 S 322 595 46
DT 2 G 338 689 51
DT 3 U 308 514 41
DT 4 K 340 698 52
표 2. SLBM 비행 결과 Table 2. SLBM flight results.
그림 6. SLBM 발사 시나리오 Fig. 6. SLBM launch scenario.
해상 센서플랫폼의 SLBM 탐지 알고리즘은 그림 5와 같으 며, 입력파라미터는 SLBM의 비행궤적, RCS 및 해상 센서플랫 폼의 위치가 된다. 시간 에서의 측면각 는 SLBM의 비행 경로 벡터와 센서플랫폼에서 SLBM까지의 위치벡터의 내적을 통해 계산할 수 있다. 또한 이 측면각에 해당되는 RCS를 찾아 레이더의 최대 탐지거리를 구할 수 있다. 따라서 시간 에서의 센서플랫폼과 SLBM간의 거리 , 및 레이더의 최대 탐지 거리 max와의 비교를 통해 탐지 여부를 판단할 수 있다.
시뮬레이션은 1초 단위로 수행했으며, 레이더의 신호처리 알 고리즘은 고려하지 않았다.
3-2 해상 센서플랫폼의 SLBM 탐지 시뮬레이션
1) 가정사항
해상 센서플랫폼의 SLBM 탐지 시뮬레이션을 위해 다음과 같은 상황을 가정하였다. SLBM의 발사 위치는 그림 6과 같이 북한이 SLBM 수직 사출시험을 실시한 위치로 알려진 신포조 선소로부터 북동쪽으로 약 350 km 떨어진 해상으로 임의 선정 했다. 또한 SLBM의 탄착위치는 전략적 가치가 높을 것으로 판 단되는 S, G, U 및 K 지역을 임의로 선정하였다. 또한 사거리 조절은 SLBM의 전술적 이점을 달성하기 위해 짧은 비행시간 과 낮은 고도를 나타내는 DT로 하였다. 또한 동해상에 85 km × 225 km 면적의 센서플랫폼 배치구역을 설정하고 5 km 간격으
로 SPY-1D 레이더를 탑재한 이지스함을 배치하였다. SPY-1D 레이더는 RCS 1.0 ㎡ 인 표적을 최대 830 km [9]에서 탐지가 가 능하고, 탐지거리와 추적거리는 동일하다고 간주하였다. 또한 지구 곡률에 의한 레이더의 가시선(LOS; line of sight) 아래의 고도는 음영구역으로 SLBM의 탐지가 불가능한 것으로 가정 하였다.
SLBM의 탐지 시뮬레이션은 하나의 SLBM 의 발사지점으로 부터 S, G, U 및 K 지역까지 총 4개 궤적에 대해, 해상 센서플랫 폼 배치구역 각 격자에 배치된 이지스함이 SLBM을 탐지하는 시간을 계산하였다. 그리고 단순하지만 실질적 효용성이 높은 방법으로 4개 궤적에 대한 시뮬레이션 결과를 중첩하여 가장 탐지시간이 긴 이지스함의 위치를 SLBM 탐지를 위한 효과적 인 센서플랫폼 위치로 판단하였다.
2) 시뮬레이션 결과 해석
총 4개의 DT에 대한 SLBM의 비행결과는 표 2와 같으며, 센 서플랫폼 배치구역에서의 탐지시간은 그림 7과 같이 나타났다.
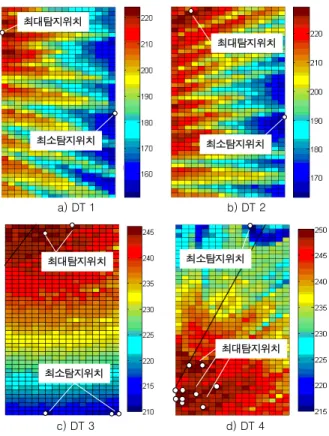
그림 7 c)와 d) 위를 가로지르는 실선은 SLBM이 센서플랫폼 배 치구역 상공을 통과하는 경로이며, 그림 7 a) 및 b) 에서는 SLBM이 센서플랫폼 배치구역 상공을 통과하지 않는다.
SLBM이 수도권으로 발사되는 DT 1은 총 595 km의 사거리 를 나타내며, 정점고도는 46 km이다. 또한 해상 센서플랫폼 배 치구역 내에서 SLBM을 최대 탐지하는 위치는 배치구역 좌측 상단부분이며 총 224초(총 비행시간의 69.5%) 탐지 가능하였 고, 최소 탐지 위치는 우측 중앙부분에서 151초(총 비행시간의 46.9%) 탐지 가능하였다. DT 2에서는 총 689 km의 사거리를 나 타내며 정점고도는 51 km이다. SLBM의 최대 탐지 위치는 DT
최대탐지위치
최소탐지위치
최대탐지위치
최소탐지위치
a) DT 1 b) DT 2
최대탐지위치
최소탐지위치
최소탐지위치
최대탐지위치
c) DT 3 d) DT 4
그림 7. SLBM 탐지 시뮬레이션 결과
Fig. 7. Results of the SLBM detection simulations.
최대탐지
위치
최소탐지
그림 8. SLBM 탐지 시뮬레이션 결과 종합 위치
Fig. 8. Final result of the SLBM detection simulation.
1과 유사하게 센서플랫폼 배치구역의 좌측 상단부분이며 총 229초(총 비행시간의 67.8%) 탐지가 가능했다. 최소 탐지도 DT 1과 동일하게 센서플랫폼 배치구역의 우측 중앙부분에서 163 초(총 비행시간의 48.2%) 가능한 것으로 나타났다. 센서플랫폼 배치구역 내에서 DT 1과 DT 2의 탐지경향은 유사하게 나타났 으며, 이는 SLBM의 궤적이 센서플랫폼 배치구역 외곽의 상단 부분을 통과하기 때문이다.
한편 SLBM이 센서플랫폼 배치구역 내부를 통과하는 DT 3 과 DT 4의 탐지경향은 상이하게 나타났다. DT 3은 총 514 km 를 비행하는 궤적이며, 정점고도는 41 km이다. 최대 탐지 가능 구역은 센서플랫폼 배치구역의 좌측 및 중앙 상단 즉, SLBM이 탐지구역 내 상공을 가로지르는 위치이며, 246초(총 비행시간 의 79.9%)로 비교적 높은 탐지율을 보였다. 최소 탐지구역은 센 서플랫폼 배치구역의 하단부분, 즉, SLBM의 궤적에서 먼 곳에 서 210초(총 비행시간의 68.2%)간 탐지하는 위치이다. 또한 DT 4는 다른 궤적에 비해 센서플랫폼 배치구역을 가장 많이 통과 하는 궤적이며, 사거리는 698 km, 정점고도는 52 km이다. 최대 탐지구역은 센서플랫폼 배치구역의 좌측 하단부분이며 총 250 초(총 비행시간의 73.5%) 탐지가 가능했고, 최소 탐지구역은 센서플랫폼 배치구역의 상단 중앙부분으로 총 215초(총 비행 시간의 63.2%) 탐지하였다.
또한 센서플랫폼 배치구역 전체의 SLBM 평균 탐지시간은 DT 1 186초(57.6%), DT 2 199초(59.0%), DT 3 232초(75.48%)
및 DT 4 238초(70.0%)로 SLBM의 비행궤적과 가까울수록 탐 지율이 전반적으로 증가하는 것을 알 수 있다. 그러나 DT 4보 다 DT 3의 탐지율이 높은 것은 두 궤적에 대한 각각의 SLBM 고도 및 측면각 에 따른 RCS 차이 때문이다. 따라서 SLBM의 탐지를 위한 센서플랫폼 배치문제에서 탐지거리 뿐만 아니라 RCS가 반드시 고려되어야 함을 알 수 있다.
그림 8는 DT 1부터 DT 4까지의 시뮬레이션 결과를 중첩하 여 해상 센서플랫폼 배치구역 내의 탐지율을 종합적으로 나타 낸 것이다. 가장 높은 탐지율은 구역의 좌측 상단에서 70.45%
을 보였고, 가장 낮은 탐지율은 구역의 우측 하단에서 59.64%
로 나타났다. 따라서 해상 센서플랫폼 배치구역 내에서 SLBM 의 네 가지 궤적에 대한 가장 효과적인 센서플랫폼 배치 위치는 구역의 좌측 상단이 된다.
이 시뮬레이션 결과는 동해상 임의의 구역에 위치한 SLBM 탑재 잠수함이 우리나라 4개소의 탄착지점으로 SLBM을 발사 하는 시나리오에 대해 분석한 것이다. 그러나 현실적로 SLBM 의 발사점과 탄착지점을 예측하는 것은 상당히 어려울 것이다.
이러한 문제를 극복하기 위해 지식 기반의 다양한 군사정보의 분석과 평가를 기반으로 다양한 상황에 따른 시나리오 결과 DB를 구축한다면 SLBM을 보다 신속하고 효과적으로 방어하 는데 도움이 될 수 있을 것이다. 또한 시뮬레이션에서 사용된 해상 센서플랫폼인 이지스함은 전ㆍ평시에 탄도미사일 방어 임무만 수행하는 것이 아니라 다양한 임무를 동시에 수행한다.
따라서 이지스함이 임무를 수행하는 위치와 SLBM 방어를 위 한 위치를 동시에 고려한다면 실제 적용 가능한 이지스함의 최 적 위치를 도출할 수 있을 것이다.
Ⅲ. 결 론
SLBM은 일반적인 탄도미사일과는 달리 잠수함에서 발사되 며, 잠수함의 은밀성과 기습효과를 극대화하기 위해 비교적 낮
김 지 원 (Jiwon Kim)
2005년 3월 : 해군사관학교 기계조선공학과 (공학사, 군사학사) 2010년 1월 : 국방대학교 무기체계학과(국방과학 석사) 2013년 1월 ~ 현재 : 국방대학교 무기체계학과 박사과정
※관심분야 : 무기체계, 탄도미사일 방어, 시스템엔지니어링
권 용 수 (Yong Soo Kim) 1980년 3월 : 해군사관학교 (공학사) 1983년 2월 : 서울대학교 전기공학과(공학사) 1986년 2월 : 서울대학교 전기공학과(공학석사)
1993년 10월 : 영국 Manchester University 전기공학과(공학박사)
※관심분야 : 공중/미사일 방어체계, 유도무기체계, 시스템엔지니어링
김 남 기 (Namgi Kim)
1989 년 2월 : 금오공과대학교 전자공학과 (공학사) 2000년 1월 : 국방대학교 무기체계학과 (공학석사) 2015년 1월 ~ 현재 : 충남대학교 군사학 박사과정
※관심분야 : 공중/미사일 방어체계, 탄도미사일 방어전략, 합동 및 연합 작전수행
은 고도와 짧은 비행시간을 나타내는 DT로 발사될 가능성이 상당히 높다.
이러한 관점에서 본 논문에서는 효과적인 SLBM의 탐지를 위해 측면각에 따른 SLBM의 RCS와 비행궤적을 계산하고, 이 를 탐지하는 해상 센서플랫폼의 탐지특성과 배치에 대해 분석 하였다. 본 연구는 SLBM의 고유한 비행특성과 RCS를 고려한 해상 센서플랫폼 배진 위치 결정에 대한 기초단계 연구이다. 이 러한 연구 결과를 기반으로 실제 정보 및 관련 자료들을 확보하 여 발전시키면 SLBM에 대응하기 위한 보다 종합적인 연구에 기여할 수 있을 것이다.
참고 문헌
[1] J. W, Kim and Y. S, Kwon, “An analysis of the ballistic missile detection characteristics of a radar depending on RCS,” Korean Journal of Military Arts and Science, Vol.
71, No. 2, pp.1-17, Jun.2015.
[2] L. Gronlund and D. C. Wright, “Depressed trajectory SLBMs: a technical evaluation and arms control possibilities,” Science & Global Security, Vol 3, pp.
101-159, 1992.
[3] N. G, Kim, “A study on the analysis of the flight trajectory characteristics for ballistic missiles,” Master's Degree dissertation, Korea National Defense University, Seoul, 1999.
[4] Y. S, Kwon and B.S, Choi, “Analysis of the flight trajectory characteristics of ballistic missile,” Journal of the Military Operations Research Society of Korea, Vol. 32, No. 1, pp.176-187, Jun. 2006.
[5] J. W, Kim and Y. S, Kwon, “Analysis of flight trajectory characteristics of the MRBM by adjusting the angle of a flight path,” Journal of the Korea Institute of Military Science and Technology, Vol. 18, No. 2, pp.173-180, 2005.
[6] D. C. Wright and Timur Kadyshev, “An analysis of the North Korean Nodong missile,” Science & Global Security, Vol. 4, pp.129-160, 1994.
[7] http://www.globalsecurity.org/wmd/world/russia/r-27-specs.htm (Date : 2015.8.12.)
[8] http://www.b14643.de/Spacerockets/Diverse/R-27/index.htm (Data : 2015.8.12.)
[9] D. Wilkening, “European ballistic missile defense options,”
Center for International Security and Cooperation Stanford University, p.37, Sep. 2009.
김 동 민 (Dong Min Kim)
2005년 3월 : 해군사관학교 외국어학과 (문학사, 군사학사) 2014년 ~ 현재 : 국방대학교 무기체계학과 석사과정
※관심분야 : 탄도미사일, 미사일 방어체계, 시스템엔지니어링
박 영 한 (Young Han Park)
2005년 3월 : 해군사관학교 외국어학과 (문학사, 군사학사) 2014년 ~ 현재 : 국방대학교 무기체계학과 석사과정
※관심분야 : 탄도미사일, 미사일 방어체계, 시스템엔지니어링