논문 2016-53-9-5
다관절 차량의 분산형 제어 시스템을 위한 이더넷 기반 TCN 토폴로지 최적화
( Optimization of TCN-Ethernet Topology
for Distributed Control System in Railway Vehicles )
김 정 태*, 황 환 웅**, 이 강 원*, 윤 지 훈***
( Jungtai Kim, Hwanwoong Hwang, Kang-Won Lee, and Ji-Hoon Yunⓒ)
요 약
본 논문은 다관절 철도 차량의 효율성 및 안정성 향상을 위해 분산형 제어 시스템 구축 시 이더넷 기반의 Train Communication Network(TCN) 적용안을 제시하고, 해당 망의 최적 네트워크 토폴로지 구성을 위한 방법론을 제안한다. 적용 된 TCN은 백본 망과 하위 망의 계층 구성을 갖고, 하위 망이 관장하는 차량의 수에 따른 전송 딜레이와 안정성을 경유 노드 수와 차량 간 케이블 수로 모델링한다. 이를 기반으로 목적 함수를 정의하고 최적해를 도출하기 위한 방법론을 제시한다. 차량 수의 정수 제약 조건을 완화하여 목적함수의 최적 실수해를 먼저 도출하고, 이로부터 최적 정수해를 탐색하는 방법을 이용한다.
수치 결과를 통해, 도출된 해의 특성을 다양한 관점에서 분석한다.
Abstract
For higher efficiency and reliability of railroad trains with many electronic sensors and actuators, a distributed control system with which electronic components communicate with each other in a distributed manner via a data network is considered. This paper considers Ethernet-based Train Communication Network (TCN) for this purpose and proposes a methodology to optimize the topology in terms of transmission latency and reliability, each of which is modeled as the number of traversing backbone nodes and the number of cables between vehicles, respectively. An objective function is derived accordingly and a closed-form optimum is obtained by relaxing the integer constraint of the number of vehicles for a unit network. Then, the final integer optimum is searched around it. Through numerical evaluation, the validity of the proposed methodology and the characteristics of the resulting solutions are shown.
Keywords : train communication network, network topology, distributed control system, Ethernet network
*정회원, 한국철도기술연구원 (Korea Railroad Research Institute)
**학생회원, 서울과학기술대학교 전기정보공학과(Department of Electrical and Information Engineering, Seoul National University of Science and Technology)
***정회원, 서울과학기술대학교 전기정보공학과(Department of Electrical and Information Engineering, Seoul National University of Science and Technology)
ⓒCorresponding Author (E-mail : [email protected])
※ 본 연구는 한국철도기술연구원 주요사업의 연구비 지원으로 수행되었습니다.
Received ; July 1, 2016 Revised ; August 17, 2016 Accepted ; August 31, 2016
Ⅰ. 서 론 현대의 철도 차량은 수많은 전자식 센서와 제어장치
를 내장하고 있고, 이들 간의 데이터 교환을 위해 UART, CAN, MVB(Multifunction Vehicle Bus) 또는 TCN (Train Communication Network)[1]등의 다양한 통신 방 식을 통해 상호 연결을 구현한다. 이러한 연결 환경은 철도 차량이 무인화될 경우 더욱 고도화되어야 한다.
무인 주행을 위해 새로운 센서 및 제어장치들이 추가되 어 더욱 복잡한 연결 구성이 요구될 뿐만 아니라, 정밀 한 제어를 위해 이들 간에 보다 빠른 속도로 많은 양의 데이터 교환이 필요하기 때문이다.
이를 위해 기존처럼 단일 중앙 제어장치가 모든 센서 및 제어장치 간의 데이터 교환을 중계하고 각각을 통제 하는 경우, 연결이 과도하게 복잡해지고 주행 안정성이
떨어질 수 있다. 즉, 중앙 제어장치로 모든 데이터 트래 픽이 집중되기 때문에, 중앙 장치에 장애가 발생할 경 우 차량의 주행이 어려울 수 있다. 따라서, 장치들 간에 데이터를 직접적으로 교환하고 동작하는 형태로 운행 기능이 분산되어 수행되는 분산형 시스템이 고려될 필 요가 있다.
고속 데이터 교환을 분산적으로 수행하는 시스템 구 축에 있어, 기존의 통신 방법은 충분한 대역폭 및 전송 효율성을 제공하지 못한다. TCN은 이러한 요구 사항을 만족시키기 위해 이더넷(Ethernet)을 전송 기술로 도입 하여 진화된 표준을 발표하였다.[2] 이를 통해 보다 높은 전송 대역폭과 효율성뿐만 아니라, 자유로운 토폴로지 구성이 가능하게 되었다. 이더넷 기반의 TCN은 백본 네트워크(Ethernet train backbone)[3]와 여기에 연결되 는 하위 네트워크(Ethernet consist network)[4]들로 구 성된다. TCN의 성능 및 구축 비용은 이 둘의 복합으로 구성되는 망 토폴로지에 의해 결정되므로, 철도 차량의 요구 사항을 만족시키는 TCN 토폴로지 구성에 대한 연구가 필요하다.
기존 TCN 관련 연구에는 이더넷 기반의 중련편성을 포함한 열차에서 그 구성이 변경될 때, 열차의 분리 및 결합이 이루어 질수 있고 이에 따른 네트워크의 구성을 가변적으로 변경된다. 이에 따라 연속적인 열차제어를 지원하기 위한 가변 네트워크 구성 시 각 노드의 주소 를 할당하는 방법 연구[5], ns-3 시뮬레이션을 통한 신뢰 성 평가 및 개선 프레임워크 연구[6], TCN 분석을 위한 툴[7], TCN 시뮬레이션을 위한 시뮬레이터 설계[8], 철도 차량의 이더넷 표준이 확립되기 전 철도 차량에 이더넷 을 적용하기 위한 일본의 T-Ethernet[9] 등이 있었다.
이외에 철도 차량을 위한 이더넷 망의 토폴로지 구성에 대한 연구[10~11]가 일부 수행되었다. 하지만, 아직까지 TCN을 적용하여 분산형 시스템 구현 시 최적 토폴로 지 설계를 위한 수학적 모델 및 솔루션에 대한 연구는 수행되지 않았다.
본 논문은 다관절 차량의 분산형 시스템 구축을 위해 TCN 적용 시, 이를 구성하는 단위 네트워크(consist network)가 관장하는 차량의 수에 따른 목적함수를 모 델링하고 이를 최적화하는 TCN 토폴로지를 구하는 방 법론을 제시한다. 각 노드들이 중앙 노드의 중계 없이 분산적으로 상호 간 메시지를 교환하는 상황에서, 차량 간 연결에 필요한 케이블 수의 최대값과 전송 시 거치 는 노드 수의 평균값에 대하여 각각의 가중치를 부여하 고 전체 차량 수의 변화에 따른 단위 네트워크 내 차량
수의 최적치를 도출한다.
이러한 과정을 기술하기 위해 본 논문은 다음과 같이 구성되어 있다. 먼저 II장에서는 관련된 기존 연구를 알 아보고, III장에서는 시스템 모델을 제시한다. IV장에서 는 문제 정의와 최적해를 구하기 위한 수식을 도출하 고, V장에서는 다양한 가중치 값과 차량 수에 대하여 IV장에서는 도출된 수식과 해의 유효성을 검증한다. 마 지막으로 VI장에서는 결론과 추가 연구 사항을 제시한다.
Ⅱ. 기존 연구
이번 장에서는 철도 차량을 위해 일반적인 이더넷 통 신 망 도입 시 토폴로지에 관한 기존 연구를 알아본다.
[10]은 복수 차량으로 이루어진 철도 차량에서 효율성과 안정성을 균형있게 지원하기 위한 하이브리드형 네트워 크 토폴로지를 제안하고 있다. 하이브리드 토폴로지는 열차와 같이 일렬로 연결된 차량 간 통신에 적합하도록 제안된 것으로 각 차량을 적절한 수의 그룹으로 묶고 그룹 내의 통신 네트워크로는 스타 토폴로지, 그룹 간 통신 네트워크로는 데이지체인 토폴로지로 구성된다.
이를 통해 중앙 노드와 말단 노드 사이의 통신이 일정 홉 수를 넘어가지 않도록 하여 전송 딜레이를 제한하면 서, 또 차량 간 통신에서는 데이지체인 토폴로지를 이 용하여 케이블 수를 절감할 수 있다. 이러한 하이브리 드 토폴로지 구성 시 단위 네트워크 크기를 최적으로 편성 방안에 관한 연구[11]가 수행되었다. 하지만, 해당 연구는 선두차의 제어장치와 각 차량 간의 통신만을 고 려한 중앙 집중 시스템의 최적화를 수행하였으므로, 본 논문의 TCN 기반 분산형 시스템 최적화와는 차이가 있다.
그림 1. 다관절 차량과 중련 편성[12]
Fig. 1. A Multi-articulated vehicle and coupled composition[12].
Ⅲ. 시스템 모델 1. 분산형 제어 시스템 모델
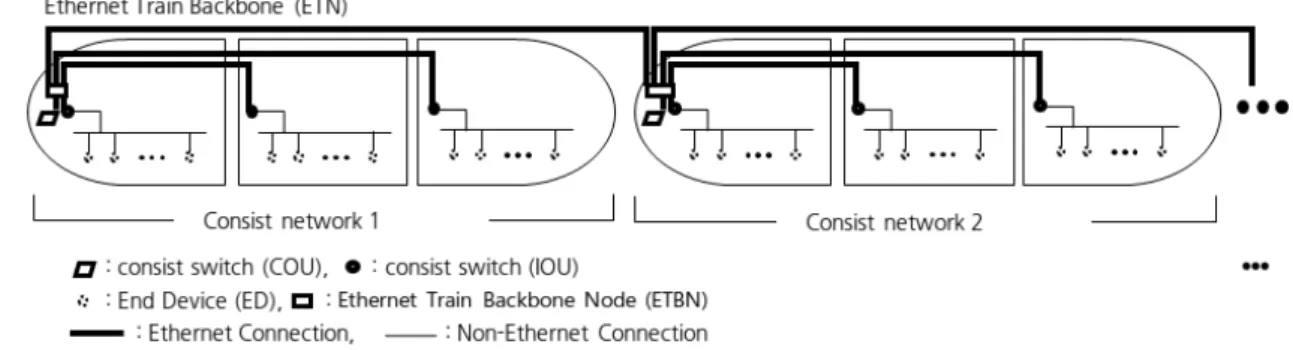
그림 2. 다관절 차량의 분산형 제어시스템을 위한 TCN 구성
Fig. 2. TCN for the distributed control system of a multi-articulated vehicles.
본 논문에서는 바이모달트램, 경량 전철 등 다관절 차량에 적용되는 분산형 시스템에 대하여 고찰해 보기 로 한다. 다관절 차량도 철도 차량과 마찬가지로 여러 대의 차량이 일렬로 연결되는 구조를 갖는다. 특히 다 관절 차량은 그림 1와 같이 중련 편성을 통해 승객 수 요에 맞게 탄력적으로 운행할 수도 있으며[12] 이 때에는 차량 간 물리적 연결뿐만 아니라 차량 간 통신을 위한 케이블 연결도 고려해야 한다.
다관절 차량에 장착하기 위한 제어 시스템으로 최근 연구되고 있는 분산형 시스템을 들 수 있다.[13] 분산형 시스템에서는 기존의 철도 차량에서와 같이 선두차의 종합제어장치가 모든 후행 차량과 측정 및 제어에 필요 한 정보를 주고 받는 것이 아니라, 연결된 차량을 몇 개 의 단위 그룹으로 나누고 각 그룹의 선두차에 제어장치 (Control and Operation Unit : COU)를 배치한 후 그룹 내 차량의 제어를 분산적으로 담당하게 한다. 차량 조 향 등 선두차에서 수행해야할 필수적인 제어는 선두차 의 COU에서 담당하지만 각 차량 그룹의 추진과 제동 은 그룹 별 COU에서 각 차량의 입출력장치(Input and Output Unit : IOU)에 명령을 함으로써 이루어진다. 이 를 통해 선두차에 케이블 연결이 집중 되는 것을 방지 하고 운행 시 가변적인 차량 조성이 가능하도록 한다.
2. TCN 구성 모델
이더넷 기반의 TCN은 백본 네트워크인 Ethernet Train Backbone(ETB)[3]와 여기에 연결되는 하위 네트 워크인 Consist Network(CN)[4]들로 구성된다. ETB는 Ethernet Train Backbone Node(ETBN) 간의 데이지 체인 연결로 구성되고, 각 ETBN은 하위 CN을 갖는다.
CN은 Consist Switch(CS) 노드들 간의 연결로 구성되 고, CS에는 말단 센서 또는 제어장치에 해당하는 End Device(ED)가 기존 통신 기술을 통해 연결될 수 있다.
동일 CS에 연결된 ED간 통신은 기존 통신 기술을 통 해서 이루어지고, 동일 CN내이지만 다른 CS에 연결된 ED간 통신은 CS를 거쳐서, 그리고 다른 CN의 ED간 통신은 CS 및 ETBN을 거쳐서 이루어진다.
다관절 차량에 분산형 시스템을 이더넷 기반 TCN 으로 구성한 예를 그림 2에 나타내었다. 그림 2에서는 차량 세 대가 다관절로 연결되어 단위 편성이 구성되 고, 이를 중련 연결된 것을 전체 차량 편성으로 간주하 여 구성되어 있다. 이를 위한 TCN 구성을 위해 다음을 가정한다. 각 단위 편성은 첫 번째 차량에 ETBN이 위 치하며, 각 편성의 ETBN은 ETB를 통해 연결 되어 다 른 편성과 연결되도록 한다. 각 ETBN은 하나의 하위 CN을 갖고, 이를 구성하는 CS들은 스타 토폴로지의 형 태로 ETBN에 직접 연결된다. 그리고, 각 CS는 하나의 차량을 관장한다. 즉, 각 차량의 ED들은 해당 차량의 CS에 연결된다. 각 CS는 분산 시스템에서 COU 또는 IOU의 역할을 수행한다. CN별로 하나의 COU와 복수 의 IOU가 존재한다.
Ⅳ. CN 토폴로지 최적화
여기에서는 앞서 설명한 TCN 토폴로지를 최적화하 기 위한 문제 정의와 그 해를 구하는 과정을 기술한다.
1. 토폴로지 최적화 문제 정의
CN이 관장하는 차량의 수에 따라 각 차량 간 연결에 사용되는 케이블의 최대 수와 서로 다른 CN 간 통신에 있어서 거치게 되는 ETBN의 수가 달라진다. 본 논문 에서는 이 두 수치를 최소화하도록 CN이 관장하는 최 적 차량의 수 을 구하는 것을 목적으로 한다. 이 때, CS에 연결되는 각 ED의 데이터 전송 특성이 정의되지 않은 상태를 가정하였으므로, 각 CS 별로 동일하다고
가정하고 평균값으로 최적화를 수행한다. 전체 차량의 수는 으로 정의한다.
먼저, 그림 2로부터 차량 간 연결에서 소요되는 최대 케이블의 수는 이 됨을 확인 할 수 있다. 각 CN에서 선두 차량과 후속 차량의 연결 시 케이블 수가 최대가 되며 이는 각 CN에서 선두 차량의 ETBN과 후속 차량 들의 CN간 연결에 필요한 케이블 수 과 각 ETBN 간의 연결에 필요한 케이블 수 의 합이다.
첫 번째 CN의 COU/IOU가 다른 차량의 COU/IOU와 통신하고자 할 때 거치는 ETBN의 수는 인접한 CN일 경우 2개이고 옆의 편성으로 갈수록 1씩 증가한다. 두 번째 편성에서는 인접한 편성(편성 1, 편성 3)의 경우 2 개, 그리고 네 번째 편성부터는 1씩 증가하는 값을 갖 는다. 즉 인접한 편성은 2개이며 이에서 멀어질수록 거 치는 노드의 수가 증가한다. 각 편성 별로 통신 시 거치 는 노드의 수를 정리하면 표 1과 같다. 필요한 총 CN의 수를 라고 하면, 이는
⌈
⌉
(1)이 되고( 는 보다 크거나 같은 정수 중 최소값), 모든 분산형 통신에 대하여 경유 ETBN의 평균값( )은 표 1 에서 대각선 윗부분 값의 평균으로 구해진다. 이를 위해 표 1의 대각선 윗부분 값에서 1을 감하고 모두 더하면
(2) 이 되고, 양방향 통신을 고려하므로 여기에 2를 곱하고, 이를 총 통신 CN쌍의 수인 로 나누면 은 다음과 같다.
(3)
식 (2)를 도출 시 1을 감하였으므로 식 (3)에서는 최 종적으로 1을 더하여 값을 구한다. 식 (3)은 [11]에서 고 려한 중앙집중 시스템에서 거치는 평균 노드 수와 매우 다른 형태를 보이고, 따라서 최적해 도출 방법도 달라 진다.
앞에서 도출한 식을 사용하고 케이블 수에 대한 가중 치를 , 거치는 ETBN 수에 대한 가중치를 로
하였을 때 목적함수 를 정리하면
∙ ∙
(4)이고,
이므로 위 식은 다음과 같이 나타낼 수 있다.
∙
∙
(5)여기서 은 이 의 배수가 되도록 하는 정수 이며 다음과 같이 정의된다.
≤ ≤ (6) 식 (6)에서 는 나누어서 나머지를 구하는 연산자이 다. 실제 다관절 차량에서는 동일한 크기의 단위 편성 을 연결하는 경우가 많으므로 이라는 가정이 유 효하나 일반화를 위해 그렇지 않은 경우까지 고려하면
≠ 인 조합도 발생한다.
표 1. CN간 통신 시 거치는 ETBN의 수
Table1. The numbers of ETBNs to be traversed in communication between compositions.
CN 1 CN 2 CN 3 … CN C
CN 1 - 2 3 … C
CN 2 2 - 2 … C-1
CN 3 3 2 - … C-2
⦙
CN C C C-1 C-2 … -
2. 최적해 도출
목적함수를 나타내는 식 (5)는 에 대하여 convex 형태가 된다. 극값을 해석적으로 구하기 위해서는 에 대하여 미분을 취해야 하나 가 정수이므로 불가능하다.
따라서, 먼저 가 연속(실수)이라고 가정하여 해를 구 한 후 다시 정수일 때의 해를 찾기로 한다. 식 (5)를 에 대하여 미분하면 다음과 같다.
∙
∙
(7)
위 식이 0이 되도록 정리한 후 에 대하여 풀면 아 래의 식을 구할 수 있다.
m in
∙ (8)
식 (8)은 가 실수인 가정에서 도출된 것이므로 정 수인 실제 상황에서 이를 만족하는 최적화 해 m in을 구해야 한다. 이를 위해 본 논문은 [11]과 유사하게 도출 된 최적 실수해를 기준으로 주변 정수값의 최적성을 탐 색해가는 방법을 사용하여 최종 정수해를 도출한다. 해 를 도출하는 과정에서 사용되는 변수의 정의는 [11]과 같다.
Ⅴ. 시뮬레이션 및 결과
이 장에서는 다양한 값의 가중치( )와 전체 차량의 수( )에 대하여 앞에서 제안한 방식을 통해 최 적해를 구하고 그 값을 검증한다. 주요 인자가 정수일 때와 편의상 실수로 가정하였을 때의 각각 목적함수의 형태를 살펴보고 그 경향과 최적해의 위치도 고찰해 본다.
1. 시뮬레이션 환경
본 시뮬레이션에서 외부 환경으로 간주할 수 있는 독 립 변수로는 차량의 수( )와 가중치( )를 들 수 있다. 이 때 가중치는 식 (5)와 (8)에 보인 바와 같이 상대적인 비율로서 영향을 주게 된다. 따라서 본 시뮬 레이션에서는 의 비율을 독립변수로 놓고 10-2 에서 102까지 변화시켜가며 최적해를 구하였다. 전체 차 량의 수( )의 경우 일반적으로 트램이나 경량 전철 등 다관절 차량은 일반 철도 차량 보다 작다. 트램의 경우 현재 까지 건설된 노선에서 차량의 수가 가장 큰 것은
10인데[14~15] 향후 확장 및 일반화를 위해 시뮬레이션
수행에 적용되는 의 범위는 1에서 40까지로 하였다.
이와 같이 주어진 과 에 대하여 [11]의 탐 색방법을 이용해서 구한 해와 가능한 모든 에 대하 여 ≤ ≤ 전체검색(full search) 방식으로 구한 해를 비교한다.
2. 시뮬레이션 결과
먼저 시뮬레이션을 수행한 전체 시행에 대하여 해를 구하는 3가지 경우를 나누어 표시하면 그림 4와 같다 (각 경우에 대한 설명은 [11]을 참조). 모든 경우에 대하 여 최대 2회의 반복 수행으로 해를 정확히 구할 수 있다.
이 짝수인 경우 많은 경우에서 반복 없이 해를 구할 수 있으며 이 홀수인 경우 2회 반복 후 해를 구하는 경우가 많다. 그림 4를 보면 전반적으로 포물선의 모양 을 나타냄을 알 수 있다.
그림 4. 시뮬레이션의 각 케이스 별 해가 도출되는 제안 알고리즘 단계
Fig. 4. The stage in the proposed algorithm where the solution is derived for each case in the simulation.
(a)
(b)
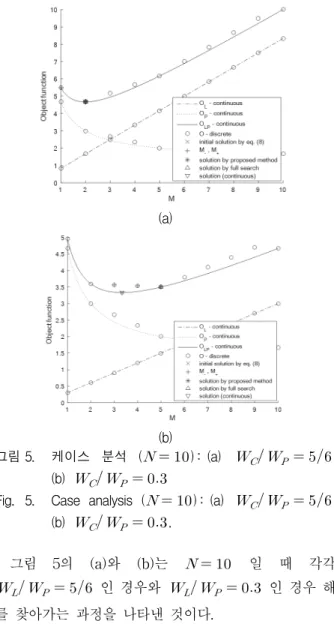
그림 5. 케이스 분석 ( ) : (a) , (b)
Fig. 5. Case analysis ( ) : (a) , (b) .
그림 5의 (a)와 (b)는 일 때 각각
인 경우와 인 경우 해 를 찾아가는 과정을 나타낸 것이다.
인 경우 이 실수라 가정하였을
때의 해 m in은 5이며 이 때의 m in
m in
은 2가 된다. 이는 그림 5(a)의 OLP–continuous 그래프와 최저 지점(solution(continuous)) 표시로부터 실수라고 가정하 였을 때의 목적함수의 해와 동일함을 확인할 수 있다.도출된 해가 정수이며 이 해는 실제로 이 정수일 때의 해와도 동일하다. 제안한 알고리즘에 의해
, 에서 출발하여 의 해 를 구할 수 있으며 이때의 반복회수는 0이 된다.
인 경우 m in은 3이 되며 이 때의
m in
m in
은 약 3.33이 된다. 이는 그림 5(b)에서 이 실수라고 가정한 연속 목적함수의 해가 됨을 확 인할 수 있다. 그러나 에 의해 목적함수의 증가분이 발생하고 이로 인해 이 점이 실제 최적해가 되지 않는다.
실제 해를 구하는 과정은 m in과 인접한 정수 ,
를 구하고 이에 해당하는 값을 나타내는 중 이 최소가 되는 , 를 구하면서 시작된 다. ≠ 이고 ≠ 이므로 에서 1을 가 감하여 , 를 구하는 데 목적함수 비교 를 통해 의 해를 얻을 수 있다. 이 경 우 반복회수는 1이 된다.
3. 에 의한 목적함수 증가
그림 5에서 보인 두 가지의 예에서 알 수 있듯이 가중 치에 따라 반복회수가 달라진다. 이 때 에 의해 생기 는 성분으로 인해 실제의 목적함수가 으로 가정 한 상태에서 도출한 비용함수보다 증가된다. 이를 수식 으로 보이면 다음과 같다. 먼저 식(4)의 를 에 관하 여 정리하면
(9)
가 된다. 이를 가지고 에 의해 생기는 목적함수의 증 가량을 구하면 다음과 같다.
(10)
여기에서 ≥ ≥ 이므로 ≥ 이 된다.
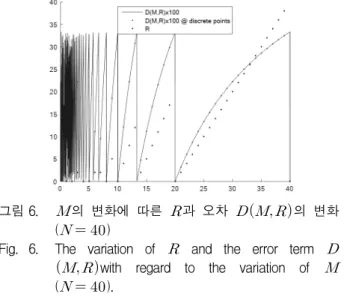
일 때 의 변화에 따른 의 변화와
의 변화를 나타내면 그림 6과 같다. 그림 6에서 보인 바 와 같이 또한 이 증가함에 따라 은 구간에 따라 증 가하는 톱니의 형상을 나타낸다. 따라서, 최적화 해는
에 있거나 이 작은 값에서 형성된다. 그러므로
[11]의 알고리즘에서 이전단계에서 도출한
( )가 해가 아니라고 예상되는 경우 6)단계에 서 각각 1씩 감하고 더하는 과정이 최적의 값을 찾는 과 정이 된다. 여기서 을 1씩 더하는 것은 작은 을 갖 는 최적치를 구하는 과정이고 에서 1씩 감하는 것은 그림 6에서 이 작을 때 요동이 급해지는 것을 이용
이 되는 을 찾고자 하는 것이다.
그림 6. 의 변화에 따른 과 오차 의 변화 ( )
Fig. 6. The variation of and the error term
with regard to the variation of ( ).
Ⅵ. 결 론
본 연구에서는 다관절 차량의 분산형 제어 시스템 구 축을 위해 이더넷 기반 TCN 도입 시 최적 네트워크 토 폴로지 구성을 위해 단위 네트워크 당 차량의 수에 따 른 목적 함수를 설정하고 이의 변화를 분석하였다. 목 적함수는 분산형 통신 시 전송 딜레이와 비례하는 경유 ETBN 수와 안정성과 연계된 차량 간 케이블 수로 구 성된다. 정수 제약 조건 완화 시 목적함수의 최적 실수 해를 도출하였고, 이로부터 최적 정수해를 탐색하는 방 법을 이용하여 도출된 해의 최적성 결과를 조사하였다.
제시된 모델링과 결과를 바탕으로 철도 차량의 시스템 설계 초기 단계에서 분산형 시스템 도입을 위한 TCN 토폴로지 구성의 기초적인 가이드라인이 될 것으로 예 상된다.
REFERENCES
[1] IEC 61375-2-1 Electronic railway equipment - Train Communication Network (TCN) - Wire Train Bus, Jun. 21. 2012.
[2] IEC 61375-1 Ed.3: Electronic railway equipment – Train communication network – Part1: TCN – Train Communication Network General Architecture, Jun. 21. 2012.
[3] IEC 61375-2-5 Ed.1: Electronic railway equipment- Train Communication Network – Part 2-5: ETB – Ethernet Train Backbone, Feb. 2015.
[4] IEC 61375-3-4 Ed.1: Electronic railway equipment–Train bus– Part 3-4: ECN–Ethernet Consist Network, May 2014.
[5] Joonkyo Kim et al., “Configuration of Variable Network Topology for Train Sequence Coupling based on IEC-61375 TCN,” Journal of the Korean Society for Railway, pp. 88-93, Nov.
2013.
[6] Çetinkaya, Egemen K et al., “Modelling communication network challenges for future internet resilience, survivability, and disruption tolerance: A simulation-based approach,”
Telecommunication Systems, 52.2, pp. 751-766, 2013.
[7] Jeongwoo Jeon et al., “TCN Analyzer for Korea High Speed Railway,” Journal of the Institute of Electronics and Information Engineers, pp.
480-482, Jul. 1999.
[8] Chang-Hee Cho et al., “Design of the train network simulator based on train communication network,” IEEE International Symposium on Industrial Electronics, Vol. 1. pp. 343-347, Jun.
2001.
[9] Kamata, Keiichi et al., “T-Ethernet: The next international standard candidate for train communication network.” World Congress on Railway Research, May 2008.
[10] Hwanwoong Hwang et al., “Analysis of Network Topology for Distributed Control System in Railroad Trains,” Journal of the Institute of Electronics and Information Engineers, Vol. 52.
No. 10, pp. 1741-1749, Oct. 2015.
[11] Jungtai Kim et al., “Study on the Optimization of Hybrid Network Topology for Railway Cars,”
Journal of the Institute of Electronics and Information Engineers Vol. 53. No. 4, pp. 27-34, 2016.
[12] http://trainpages.blogspot.kr/2015/04/portland-unio n-station.html
[13] Kwangwon Lee et al, “Annual Report of Development of Distributed and Dispersed
Complex Control System for Multi-articulated Vehicle,” Korea Railroad Research Institute, 2015.
[14] http://www.smh.com.au/nsw/sydneys-trams-to- be-the-worlds-longest-20141203-11ztba.html [15] http://www.globalrailnews.com/2014/12/05/sydney
-to-operate-worlds-longest-trams/
저 자 소 개 김 정 태(정회원)
1997년 2월 서울대학교 전기공학부 (공학사)
1999년 2월 서울대학교 전기공학부 (공학석사)
2011년 8월 KAIST 전기및전자공 학과(공학박사)
1999년 2월~2012년 7월 ㈜LIG넥스원 수석연구원 2012년 8월~현재 한국철도기술연구원 선임연구원
<주관심분야 : 열차제어, 신호처리, 임베디드시스템>
황 환 웅(학생회원)
2014년 서울과학기술대학교 전기 정보공학과 학사 졸업.
2016년 서울과학기술대학교 전기 정보공학과 석사 졸업.
2016~현재 서울과학기술대학교 전기정보공학과 박사 과정.
<주관심분야 : 데이터네트워크>
이 강 원(정회원)
1995년 충북대학교 전기공학과 학 사졸업
2000년 충북대학교 전기공학과 석 사 졸업
2005년 충북대학교 전기공학과 박 사 졸업
2003년~현재 한국철도기술연구원 선임연구원
<주관심분야 : 철도차량용 제어기 설계, 고전압 신 호처리>
윤 지 훈(정회원)
2000년 서울대학교 전기공학부 학사 졸업.
2002년 서울대학교 전기컴퓨터공학 부 석사 졸업.
2007년 서울대학교 전기컴퓨터공학 부 박사 졸업.
2007년~2009년 삼성전자 네트워크사업부 책임연 구원.
2009년~2010년 미시건대학교 박사후연구원.
2010년~2012년 금오공과대학교 조교수.
2012년~현재 서울과학기술대학교 전기정보공학과 조교수.
<주관심분야 : 통신망 설계, 무선통신>
![Fig. 1. A Multi-articulated vehicle and coupled composition [12] .](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5069244.558986/2.892.479.793.892.1051/fig-multi-articulated-vehicle-coupled-composition.webp)