http://dx.doi.org/10.7839/ksfc.2020.17.1.051
두 개의 EPPR 밸브가 적용된 정/역 가변형 사판식 액셜 피스톤 펌프 시스템 모델링
System Modeling of a Bi-directional Outlet Variable Swash Plate Type Axial Piston Pump with Two EPPR Valves
김용길
1․김수태
2*․함영복
3․윤소남
3․손호연
1Yong-Gil Kim
1, Soo-Tae Kim
2*, Young-Bog Ham
3, So-Nam Yun
3and Ho-Yeon Son
1Received: 02 Jan. 2020, Accepted: 15 Jan. 2020
Key Words:EPPR Regulator(전자비례감압 레귤레이터), Response Characteristic(응답특성), Swash Plate Type Piston Pump(사판식 피스톤 펌프), External Torque(외부토크), SimulationX(시뮬레이션엑스)
Abstract: This study addresses the modeling of a bi-directional outlet variable swash plate type axial piston pump with two EPPR valves and an analysis of the response characteristics to the angle control of that pump. In this paper, the combination of the EPPR valve and double rod type piston is referred to as the EPPR regulator. The EPPR regulator is compact and inexpensive, and has good responsiveness. Under actual pump operating conditions, because of the various external conditions of the pump, inertia is applied to the swash plate, generating the tilting torque. Also, the tilting torque can delay or shorten the response characteristics of the regulator. So we validated them through the analysis using SimulationX and these results allow users to freely integrate the EPPR regulator into the desired system.
* Corresponding author: [email protected]
1 DAIHO HYDRAULIC Co., Ltd., Seongsan-gu, Changwon-si, Gyeongsangnam-do 51568, Korea
2 Department of Mechanical Engineering, Changwon National University, Changwon 51140, Korea
3 Energy Systems Research Division, Korea Institute of Machinery & Materials(KIMM), Prof. of UST KIMM Campus, Korea
Copyright Ⓒ 2020, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호 설명
: torque from internal pressure of piston, Nm
: force from z-th piston’s pressure, N
: angle of swash plate, degree
: radius pitch circle, mm
: each position of each piston, degree
: position of the shaft according to piston, degree
: mass of piston, g
: force from z-th piston’s pressure, N
: spool position of EPPR valve, mm
: input pressure of pilot pump, bar
: control pressure of port A, bar
: stiffness of spring1, N/mm
: stiffness of spring2, N/mm
: changed length of spring1, mm
: changed length of spring2, mm
: right piston area of port A, mm
2
: left piston area of port A, mm
2
: magnetic force, N
: changed piston displacement of cylinder, mm
: length between the action point of the torque at plate and the action point of force at the piston, mm
1. 서 론
고압의 유압시스템은 동력밀도가 높아서 소형화에
유리하고 부하강성이 높고 긴 내구성을 지니고 있기
때문에 주로 가혹한 환경에서 운전되는 장비에 이용 된다.
1)이러한 특징과 건설·농기계, 항공 등 다양한 산업 기계의 고압화와 더불어 사판식 액셜 피스톤 펌프 (swash plate type axial piston pump)는 가변적으로 유 압에너지를 전달하는 대표적인 동력원으로서 활용되 어 왔다.
이러한 피스톤 펌프의 토출유량은 엔진의 회전속 도와 사판의 각도에 비례하여 결정된다. 일반적인 전 기모터의 회전속도는 고정하여 사용되므로 결국 토 출유량을 결정하는 것은 사판의 각도를 조절하는 레 귤레이터의 몫이다.
레귤레이터의 종류는 크게 기계-유압식과 전자-유 압식이 존재하지만, 근래에는 전자·무인화 기술적용 에 용이하고 높은 응답성을 위해 전자-유압식 레귤레 이터에 관한 연구들이 집중적으로 수행되어 왔다.
Choi, 2010은 유압 굴삭기 자동화를 위한 서보 레귤 레이터를 AMESim 프로그램을 사용하여 모델링하고 사판 제어에 따른 토출유량을 분석하였다.
2)그러나 전자 서보제어 레귤레이터는 빠른 응답특성을 갖는 반면에 오염에 민감하고 진동 및 충격이 노출되는 건설기계 등의 중장비에 탑재되면 신뢰성과 내구성 이 저하될 수 있다는 치명적인 단점을 가지고 있어, 이러한 단점을 해결하기 위한 방안으로 전자 서보제 어 밸브보다 오염입자에 덜 민감한 전자비례 감압밸 브(Electronic Proportional Pressure Reducing Valve:
EPPR Valve)를 이용한 레귤레이터를 제안하기도 하 였다.
3)Jeong and Jang, 2016; Seo et al., 2017 등은 EPPR 밸브와 서보피스톤을 조합한 유량 제어 시스템에 대 하여 비선형 모델과 선형 모델의 단순화 정도가 유 압펌프의 특성 및 유량제어 성능에 미치는 영향을 시뮬레이션 해석을 통해 분석하였다.
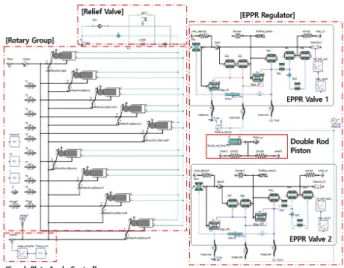
4), 7), 8)본 연구에서는 사판식 액셜 피스톤 펌프의 정·역 가변 제어 가능한 더블 로드형 피스톤 및 EPPR 밸브 2개를 적용하여 비교적 간단한 회로구성으로 우수한 응답특성을 갖는 사판 경사각을 정·역으로 제어할 수 있도록 Fig. 1(a)의 유압 회로도를 제안하였다.
실험을 통해 회로구성의 타당성을 알아보는데 여 러 번의 시행착오가 필요하고 시간과 비용이 과도하 게 소요되므로 요소부품과 회로를 모델링하여 시뮬 레이션하고 이를 통해 특성을 해석해 보기로 한다.
EPPR 레귤레이터만의 응답특성을 실험하는 경우 외부 부하토크가 없는 상태로 실험하게 되면 부하상
태의 제어 응답특성과는 상당한 오차를 가지게 된다.
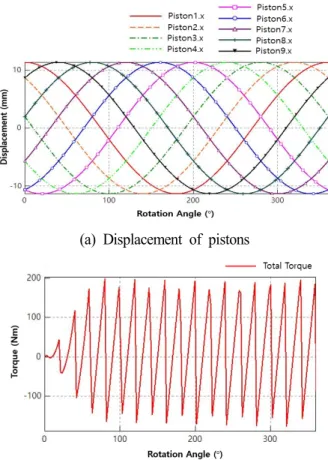
또한, 펌프와 연결되는 전동기의 회전축이 회전할 때 피스톤 펌프 내부의 실린더블록 내의 홀 수개의 피스톤에 압력이 상승하고 그의 합력은 사판을 경전 시키려고 하는 관성력이 발생한다. 이 관성력은 사판 에 연속적인 외부토크로 작용하고 이는 사판을 제어 하는 레귤레이터의 응답성을 단축시키거나 지연시 킬 수 있다.
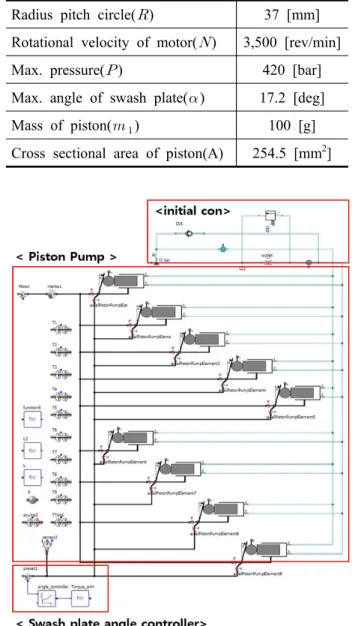
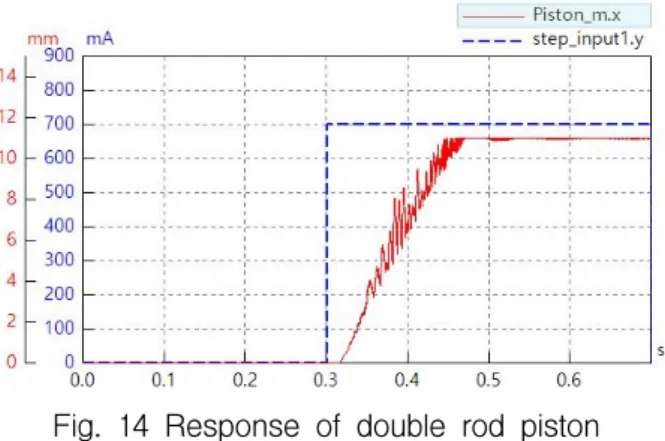
5)따라서 본 연구에서는 상용 해석프로그램인 SimulationX를 이용하여 EPPR 레귤레이터가 적용된 피스톤 펌프의 해석모델을 개발하고 외부 부하토크 를 시뮬레이션 조건에 반영한다. 이를 통해 EPPR 레 귤레이터의 설계 타당성과 응답특성을 알아보고자 한다.
연구진행 방법은 먼저 각 부품의 수학적 모델을 검토하고, 각 부품의 설계변수 또는 카탈로그 제원을 반영하여 단품들을 모델링을 한다. 마지막으로 각각 의 구성부품을 조합하여 모델링 하고, 외부토크를 부 여하는 조건에 따라 EPPR 레귤레이터의 응답특성 을 도출한다.
2. 유압 회로 및 수학적 모델
2.1 유압회로 구성 설명
EPPR 밸브와 정역가변 제어 사판식 액셜 피스톤 펌프의 사판제어 더블로드 피스톤을 조합한 유압회 로도는 Fig. 1(a)와 같으며, 파일럿 펌프, 릴리프밸브, 2개의 EPPR 밸브, 양 로드형 피스톤과 사판으로 구 성된다.
(a) neutral position (b) positive position Fig. 1 Hydraulic circuit combined with swash
plate piston pump and EPPR regulator
더블 로드 피스톤 양단의 EPPR 밸브가 OFF 상태 인 경우, 밸브의 스프링에 의해 더블 로드 피스톤 양 단은 드레인과 연결되어 중립위치에 있게 되고 이때 사판의 경사각은 제로라고 할 수 있다.
다음으로 조작자의 신호에 따라 EPPR V/V1의 비 례솔레노이드에만 전류를 인가시킬 경우, 릴리프밸브 에서 설정한 압력이 EPPR V/V1를 통과하는 경우에 P-A / T-A 포트의 lap조건, 노치 등이 반영된 개도면 적에 의해 압력강하가 발생한다. 압력강하에 의해 감 소된 제어압력은 실린더의 좌측 챔버의 수압면적에 작용하게 되고 수압면적과 제어압력의 곱은 실린더 가 발휘하는 수평방향의 힘이 된다. 이때 Fig. 1(b)와 같이 실린더는 양의 방향으로 이동하고 사판의 각도 가 제어된다. 마찬가지로 하여, 반대로 EPPR V/V2에 신호를 전달할 경우에 음의 방향으로 사판 각을 제 어하는 것이 가능해 진다.
2.2 수학적 모델
각 부품별 기능 및 수학적 모델을 설명하면 다음 과 같다. 수학적 모델은 3장에서 기술되는 해석모델 개발에 올바른 모델링 관점을 적용하기 위한 기초적 인 작업이 된다.
2.2.1 사판식 피스톤 펌프
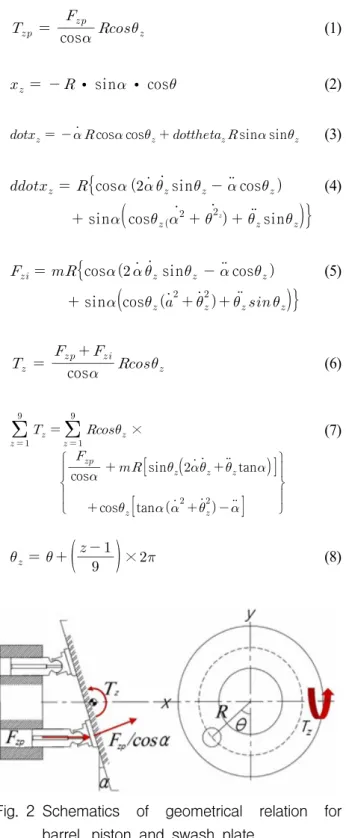
사판식 피스톤 펌프는 엔진의 회전수와 사판의 각 도 에 비례하는 행정을 왕복 운동하면서 펌핑 작용 을 하는 가변적인 유압 동력원이다. 일반적으로 피스 톤 펌프는 고압의 조건에서 작동되는데, 각 피스톤에 작용하는 압력과 피스톤의 왕복운동으로 인한 관성 력에 의해 사판의 회전 중심점을 기준으로 경전토크 (moment)가 발생한다.
이러한 경전 부하토크가 발생하는 원리를 수학적 모델로 나타내면 다음과 같다. Fig. 2는 피스톤과 실 린더 배럴 그리고 사판의 구성을 나타낸다. 피스톤 슈와 사판의 마찰력을 무시할 경우, 사판에 작용하는 힘과 거리의 곱에 의해 z번째 피스톤의 내부압력으 로부터 사판에 작용하는 토크는 식(1)과 같다.
는 z번째 피스톤 내부의 힘
이다. 나아가 피스톤 의 변위를 나타내면 식(2)와 같으며, 미분을 통하여 z 번째 피스톤의 속도
, 가속도
는 식(3), 식 (4)와 같고 이로부터 z번째 피스톤에 작용하는 관성 력은 식(5)와 같다. 따라서 피스톤에 작용하는 압력 과 피스톤의 관성력에 의한 외부토크를 조합시키면 식(6)과 같다. 또한 9개의 피스톤에 의해 적용되는
외부토크의 합력 관계식은 식(7)이 되며, 각 피스톤에 따른 구동축의 각 위치는 식(8)을 통해 알 수 있다.
cos
(1)
∙ sin ∙ cos (2)
cos cos sin sin
(3)
cos
sin
cos
(4) sin cos
sin
cos
sin
cos
(5) sin cos
cos
(6)
×
cos
sin
tan
cos
tan
(7)
× (8)
Fig. 2 Schematics of geometrical relation for barrel, piston and swash plate
2.2.2 전자비례감압밸브
전자비례 감압밸브(EPPR V/V)는 입력전류에 비례 하여 압력을 제어하는 밸브로서, 우수한 응답성을 가 지며 유압제어의 전자화가 가능하다.
6)본 연구에서는 국내 DH사의 국산 EPPR 밸브를 대
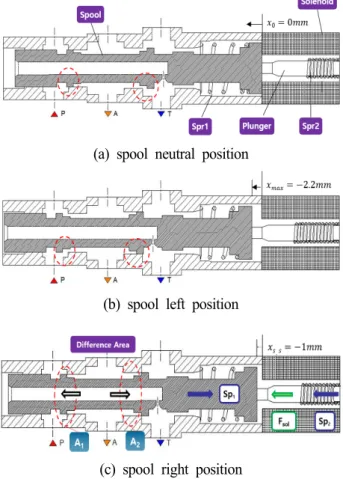
상으로 모델링 하였으며, Fig. 3은 밸브의 내부 구조와 작동원리를 설명하기 위한 조립 단면도를 나타낸다.
EPPR 밸브는 Fig. 3(a)처럼 스풀, 솔레노이드, 스프 링 2개, 플런저로 구성된다. P포트에는 파일럿 펌프 와 릴리프밸브가 연결되어 1차 압력
가 형성되며, 이는 릴리프밸브의 설정압력과 동일하다. 또한, 감압 기능으로 형성된 2차 제어압력
는 A포트에, T포트 는 저압 드레인으로 연결된다.
EPPR 밸브의 작동원리를 스풀 위치에 따라 설명 하면 다음과 같다. Fig. 3(a)와 같이 솔레노이드에 전 류가 인가되지 않은 상태에서는 플런저에 스풀 변위 를 발생시킬 힘이 존재하지 않는다. 이 때 밸브는 중립위치(x
0= 0 mm)이며, P-A포트의 개도면적은 폐 쇄 상태이고 A-T포트의 개도가 연결되어 있다. Fig.
3(b)와 같이 전류를 최대로 인가하여 최대 흡인력이 발생하면 스풀이 좌측으로 이동하는 상태를 나타낸 다. 중립위치를 기준으로 좌측을 음(-)의 방향으로 고 려하면, 플런저의 스트로크는 좌측으로 최대 x
max= -2.2 mm 까지만 이동할 수 있도록 단이 있으며, 이 때 P-A포트의 개도면적은 최대로 개방되고 A-T 포트 의 개도면적은 폐쇄된다.
(a) spool neutral position
(b) spool left position
(c) spool right position
Fig. 3 Schematic drawing of EPPR Valve
Fig. 3(c)는 스풀이 우측으로 복귀하는 상황과 동시 에 감압기능의 역할을 하는 단면적 차이에 의해 압 력이 제어되는 상황을 나타낸다. Fig. 3(c)의 A
2와 A
1은 A포트에 형성되는 압력이 작용하는 수압면적을 나타내며, 비교적 A
2가 A
1보다 면적이 크기 때문에 스풀을 우측으로 이동시키는 식(9)의 피드백 힘
을 발생시킨다. 이러한 피드백 힘과 플런저
의 흡인력
그리고 스프링의 강성 및 길이 변화 량을 고려한 힘의 평형 방정식은 식(10)과 같다. 식 (10)으로 부터 흡인력은 피드백 힘과 스프링 힘의 합 력과 비례적인 관계를 이루는 것을 알 수 있다. 여기 서, 미소한 스프링의 힘을 소거하고 식(10)을
에 대한 식(11)로 변환하면 최대 흡인력이 발생하였을 경우에 A포트의 2차 제어압력
도 최대가 되는 것 을 알 수 있다.
(9)
∙ ∆ ∙ ∆
(10)
m ax
m ax(11)
중립 상태에서 스풀의 제어범위는 –1 mm를 기준 으로 최대 ± 0.1 mm내에 제한된다고 할 수 있다. 그 이유는 P-A포트의 Overlap과 A-T포트의 Underlap 조건이 1 mm로 같으며, -1 mm 이동부터 각 개도면 적에서 압력강하가 발생하기 때문이다. 이에 따라 안정적인 2차 제어압력이 형성될 수 있는 것이다.
따라서 이러한 피드백 힘과 스풀의 제어범위는 감 압기능을 위해 설계자가 의도한 물리적 특성이라 판 단할 수 있다.
2.2.3 더블 로드 피스톤형 실린더
Fig. 4는 복귀 스프링을 갖는 더블 로드 피스톤형 실린더를 나타낸다.
실린더의 포트를 통해서 유입되는 유량 및 압력은
좌우측 챔버의 피스톤 수압면적에 작용한다. 피스톤
수압면적과 압력의 곱은 힘을 발생시키고 양단의 힘
의 차이는 최종적으로 피스톤의 진행방향을 결정한
다. 또한 더블 로드 피스톤의 중앙에는 사판을 제어
할 수 있는 기계적인 링크장치인 토크 암(torque arm)
이 연결되어 있다.
Fig. 4 Free body diagram of double rod cylinder and swash plate
이 메커니즘의 운동을 수학식으로 표현하면 다음 과 같다. 변수 L은 사판에서 토크의 작용점과 피스톤 에서 힘의 작용점까지의 거리, 초기 스프링 압축량 x
c1,initial, x
c2,initial그리고 수압면적
를 고려하여 실린더의 운동방정식을 나타내면 식(12)와 같다. 스프링의 압축량과 스프링 상수를 고려하면 스 프링의 압축력에 의한 힘
는 식(13)과 같다. 또한, 사판 경전토크를 토크 암의 거리 L로 나누면 실린더 에 작용하는 힘
는 식(7)과 결합하여 식(14)와 같 이 나타낼 수 있다.
(12)
∙
∙
(13)
×
cos
sin
tan
cos
tan