기호설명
- -
H : 뉴런의출력 V : 속도크기 a, b : 뉴런출력상수
: 속도성분
t : 시간
: 입력과 출력 δ : 중간층 오차
1. 서 론
선박 원자력 발전소 등과 같은 플랜트에 LNG ,
서의 가스배관의 길이는 작게는 수km에서 수십 에 달한다 원자력 발전소나 높은 곳 혹은 복
km . ,
<학술논문> DOI http://dx.doi.org/10.3795/KSME-B.2015.39.2.199 ISSN 1226-4881(Print) 2288-5324(Online)
가스배관망 작동상태 실시간 진단용 인공신경망 기반 모니터링 시스템
전민규 조경래 이강기 도덕희
한국해양대학교 가스솔루션센터 한국해양대학교 기계에너지시스템공학부
* , ** ,
한국해양대학교 해양플랜트운영학과
***
A Monitoring System Based on an Artificial Neural Network for Real-Time Diagnosis on Operating Status of Piping System
Min Gyu Jeon*, Gyong Rae Cho**, Kang Ki Lee***, Deog Hee Doh**
* Gas Solution Center, Korea Maritime Univ.
** Division of Mechanical and Information Engineering, Korea Maritime Univ.
*** Department of Offshore Plant Managements, Korea Maritime Univ.
(Received September 9, 2014 ; Revised October 15, 2014 ; Accepted October 20, 2014)
Key Words: Piping System(배관시스템), Vibration(진동), Camera Image(카메라영상), Displacements(이동량),
입자영상유속계 인공신경망 실시간학습
PIV( ), Artificial Neural Network( ), Real-Time Learning( ),
실시간 모니터링 휴대폰 가스배관
Real-Time Monitoring( ), Mobile Phone( ), Gas Pipe( )
초록: 본 연구에서는 인공신경망을 이용하여 배관이나 배관요소의 작동상태를 예측할 수 있는 진단방법 을 제안한다. 입자영상유속계 기술을 이용하여 얻어진 배관의 검사부위의 진동에 의한 이동량을 인공신 경망의 학습용으로 사용한다. 측정시스템은 카메라, 조명, 인공신경망이 탑재된 호스트컴퓨터로 구성된 다. 구축된 모니터링시스템이 제대로 작동하는지 이미 알고 있는 진동원 개의 휴대폰 에 대하여 적용(2 ) 하였다. 진동가속도의 최소값, 최대값, 평균값을 인공신경망의 학습에 사용해 본 결과, 평균값이 진동 상태의 실시간 모니터링에 적합함을 확인하였다. 구축된 진단시스템은 실제 가스배관의 작동상태에 대 하여 모니터링 가능함이 확인되었다.
Abstract: In this study, a new diagnosis method which can predict the working states of a pipe or its element in realtime is proposed by using an artificial neural network. The displacement data of an inspection element of a piping system are obtained by the use of PIV (particle image velocimetry), and are used for teaching a neural network. The measurement system consists of a camera, a light source and a host computer in which the artificial neural network is installed. In order to validate the constructed monitoring system, performance test was attempted for two kinds of mobile phone of which vibration modes are known. Three values of acceleration (minimum, maximum, mean) were tested for teaching the neural network. It was verified that mean values were appropriate to be used for monitoring data. The constructed diagnosis system could monitor the operation condition of a gas pipe.
Corresponding Author. [email protected]
2015 The Korean Society of Mechanical Engineers
Ⓒ
나 공급압력 대비 미세한 누설이 발생했을 때에 는 압력센서의 신호로부터 이를 감지하기란 용이 하지 않다 또한 배관시스템에 설치된 수많은 밸. , 브와 필터 등과 같은 배관요소의 작동상태에 대 해서도 이들에 설치된 센서로부터의 전기적 신호 를 이용하여 모니터링 룸(monitoring room)에서 정상작동 여부를 확인할 수 있지만 전기적 신호, 만 정상이지 밸브의 고착이나 필터의 폐색이 감 지되지 않는 경우가 있다 이러한 경우에는 감지. 방법이 없는 실정이며 이에 따르는 사고는 플랜, 트 시스템 전체에 미치는 크고 작은 사고가 발생 하게 된다.
한편 플랜트에는 다양한 설비들이 종합적으로 , 연동되어 운전되는데 이들 설비들을 제어하기 위 해서는 공기압 또는 유압제어 배관들이 설치되어 있다 이들 배관들은 직경이 작아 압력센서의 부. 착이 용이하지 않을 뿐만 아니라 다양한 설비들, 로부터의 크고 작은 복합진동을 받게 되므로 장 시간 운전에 따른 배관제어 요소들이 정상적으로 구동되지 않는 경우가 있다.
본 연구에서는 가스배관과 같이 유체배관에서 의 밸브나 유량계 등 각 요소에서의 작동상태나 누설상태를 비접촉식 속도측정법인 PIV(Particle Image Velocimetry)(1)법을 이용하여 측정하고 신, 경망(Neural network)이론(3)을 접목시켜 이들의 작 동상태를 실시간으로 판별할 수 있는 비접촉식 모니터링시스템을 구축하는 것을 연구의 목적으 로 삼고 있다.
기계설비의 진동을 카메라 영상을 이용하여 비 접촉식 측정을 한 대표적 사례로서 스펙클패턴 (speckle pattern)법(2)이 있는데 이 방법은 측정시, 스템의 정교한 설치가 필요할 뿐만 아니라 진동 모드 데이터를 얻기 위한 영상처리에 소요되는 시간이 길어 설비나 설비에 연결된 배관의 실시 간 진동 측정에 제약이 따른다 구조물의 변형과 . 응력과의 상관관계를 측정할 수 있는 디지털영상 상관법(5)이 있는데 이 방법 또한 고유진동수와의 , 상관관계 계산에 소요되는 시간이 길어 기계설, 비나 배관의 진동상태를 실시간으로 모니터링하
관계로 진동원으로부터의 노이즈발생 억제가 어 려울 뿐만 아니라 비접촉식 측정에는 적합하지 않다. 진동데이터를 실시간 신호처리를 위하여 칼만필터 등을 이용하는 방안이(4) 제시되어 있으 나 접촉식 측정방법에 의존하고 있는 실정이다.
Jeon 등(5)은 진동측정대상을 원격으로 진단하기 위 하여 비접촉식 원격 미세변위 측정 및 배관시스템 의 실시간 작동상태를 진단할 수 있는 기술을 개발 하여 보고한 바 있다 이 연구에서는 원격카메라 영. 상으로부터 얻어진 목표물의 미세진동 변위를 인공 신경망에 학습시켜 목표물의 작동 상태를 모니터링 할 수 있는 기술을 보고하고 있다 그런데 이 연구. , 에서는 미세진동 변위 데이터에 대한 FFT(fast
변환하여 얻어지게 되는 탁월주파 fourier transform)
수(representative frequency)를 인공신경망(6)의 학습 데이터로 이용하는 관계로 이를 계산하기 위해 소, 요되는 시간지연으로 인해 한 템포(tempo) 느린 실 시간 즉 준, (pseudo) 실시간(real-time)이라는 제약을 지니고 있다.
본 연구에서는 배관 진동의 데이터로부터 탁월주 파수를 구하지 않고 진동데이터 자체를 직접 인공 신경망에 실시간으로 학습시켜가면서 배관상태를 실시간으로 판단할 수 있는 모니터링시스템을 구축 하는 것으로 목적으로 삼고 있다.
배관 상태 모니터링 시스템 2.
2.1 모니터링 개요 및 장치
은 배관시스템의 작동상태 진단을 위한 모 Fig. 1
니터링 시스템을 나타낸다 크게 부분으로 나누. 3 어진다. 진단대상물인 목표물 혹은 배관시스템, 비접촉식측정시스템 그리고 인공신경망으로 나뉜 다. 목표물로부터의 미세진동을 카메라로 되어 있는 비접촉식 측정시스템이 감지하고, 감지된 미세진동에 의한 변위는 인공신경망에서 실시간 으로 학습이 된다 학습된 미세진동은 초기에는 . 임의의 미세변위 데이터로 학습이 되고 이후부터 는 지속적으로 데이터베이스에 쌓이게 된다 이. 후, 목표물의 진동이 평소와 다르게 나타나게 되 면 인공신경망은 이상신호 논리신호 ( ‘1’)를 발생
시킨다.
는 비접촉식 측정시스템의 구성을 나타내 Fig. 2
는데 측정대상물인 목표물 카메라, , (500fps, 1k x 그리고 카메라영상으로부터 미세한 진 1k pixel)
동을 계산하는 입자영상유속계부로 구성된다 카. 메라 시간해상도 500fps는 500Hz에 해당되는 것 으로서 진동모드 측정에 필요한 최소 샘플링수 5 개를 고려하면 적절한 진동측정대상의 주파수는
미만이 적절하다고 볼 수 있다 시스템 구
100Hz .
성의 초기에는 목표물의 미세진동을 정량화하기 위하여 Fig. 3와 같은 격자(grid)형태로 된 교정판
을 목표물에 부착한다 한편 이 (calibration plate) . , 교정판은 크기 10mm x 10mm의 크기 종이에
간격의 격자무늬로 되어 있는데 구축된 모
1mm ,
니터링 시스템의 성능평가를 위하여 사용되었고, 실제 배관시스템 적용시에는 배관자체표면에 임
의의 표식 주로 점을 이용 만 하여도 배관의 미세( ) 진동을 측정할 수 있다.
미세진동량을 계산하기 위하여 Jeon 등(5)도 적 용한 것과 마찬가지로 입자영상유속계(1)원리를 적용한다. 입자영상유속계로부터 얻어지는 미세 진동량(d)을 아래 식 (1)을 이용하여 계산하였다.
(1) 여기서, 은 카메라 영상에서 목표물의 초기좌표를 나타내며 는 목표물이 미세진 동에 의하여 이동된 좌표를 나타낸다 미세진동. 은 매우 높은 주파수로 진동하여 불규칙한 좌표 이동을 하게 되므로 연속적인 카메라 영상상에서 동일한 목표물이 어디로 이동하였는지 찾아내기 란 용이하지 않다 본 연구에서는 . Utami 등(7)과 Kimura 등(8)이 적용한 계조치상호상관법(gray 에 의거한 아래 식 level cross-correlation method)를 적용하였다
(2) .
(2)
이 방법은 연속되는 두 시각의 영상 사이에 상 관량, 즉 상호상관 계수가 최대가 되는 값 의 좌표 를 계산함으로써 동일한 목표물을 찾아내게 되는데, 여기서 는 상관영역내의 각 픽셀(pixel)의 계조치를 의미하며, n은 상호 상관영역의 크기(pixel), -는 연속영상에 대한 시간평균을 나타낸다. 영상 데이터를 취급함에 있어 벡터의 종점을 정함에 있어 픽셀 해상도에 의존함으로 상하좌우방향으로 최대 ±1픽셀의 불 확실성분이 존재한다 이를 보완하기 위해 본 연. 구에서는 측정 픽셀의 좌우상하 픽셀의 밝기정보 로 차 곡선에 2 fitting함으로써 픽셀 이내의 오차 1 Fig. 1 Overall procedure of the constructed monitoring system for the diagnoses on the piping system
Fig. 2 Noncontact measurement system
Fig. 3 Calibration target plate
Fig. 4 Structure of used neural network
Fig. 5 Temporal acceleration signals under no vibration condition
로 종점을 결정하는 서브픽셀보간법(9)을 사용한 다.
이상과 같은 방식으로 목표물의 미세진동에 의 한 이동량 을 고속카메라(500Hz) 영상으 로 얻어낸 다음, 카메라의 기록속도인 (
을 이용하여 다음의 식 으로 표시되
=1/500sec) (3)
는 미세진동의 가속도의 크기를 구하였다.
lim
→
,
lim
→
(3)
여기서, , 와 는 각각 제 시각 시각 및 시각에서의 동일 목표물의 영
1 , 2 3
상을 나타낸다 이상과 같은 과정을 거쳐 구해진 . 목표물의 미세 진동에 의한 가속도 데이터는 전 술한 바와 같이 인공신경망의 학습에 사용되었 다. Fig. 4는 사용된 인공신경망(6)의 구조를 나타 낸다.
(a) Model 1
(b) Model 2
Fig. 6 Real-time learning data for the input layer of the artificial neural network for two models 인공신경망은 입력층 중간층 출력층으로 구성, , 되는데 본 연구에서는 입력층의 개수를 40개부터
개까지 변경시켰고 중간층은 개로 설정하
200 , 10
였다 인공신경망 계산을 위한 상세한 이론과 계. 산법은 많은 참고문헌이 있는데 Back-propagation 법(6)을 적용하였다 입력층의 개수를 으로 하였. N 을 때, 최초에 사용한 학습용의 입력데이터는
번을 사용하였고 이어서 번의 데이터
1~N , 2~(N+1)
를 사용하였다 즉 순차적으로 한 개의 데이터를 . , 밀어내기 하듯이 학습시켰다 학습을 위한 데이. 터는 식 (3)에서 구해지는 가속도데이터를 사용하 였는데 매번 , N개의 학습데이터 중에서 최솟값
최댓값 및 평균값 을 각각 사용
(min), (max) (mean)
하였고 이들 값들에 있어서의 인공신경망에 의, 한 모니터링 특성을 확인하였다.
모니터링 시스템 검증과 적용 3.
3.1 모니터링 시스템 검증
구축된 배관시스템 모니터링 시스템을 적용하 기 전에 먼저 두 대의 휴대폰, (model 1, model 2) 을 진동모드로 작동할 때의 구축된 시스템의 모 니터링 성능을 검증하였다 미세진동 감지가 가.
능하도록 Fig. 2에 나타나 있는 바와 같이 교정판 을 휴대폰에 부착하였고 카메라 (calibration target) , 와의 거리를 170mm로 한정하였다. 매크로렌즈
와 조명을 사용함으로써 고해상의 영 (macro lens)
상이 획득되도록 하였다 총 . 4225장의 연속적인 고속카메라(500Hz) 영상인 8.45초 동안의 영상을 사용하여 모니터링 성능을 검증하였다.
는 두 가지 모델에 진동이 전혀 없었을 Fig. 5
때의 가속도데이터의 시간변화를 나타내는데, 0 이 아닌 아주 작은 값을 지니고 있음을 알 수 있 다 이는 휴대폰 자체의 진동이라기보다는 휴대. 폰이 설치된 실험환경의 주변진동에 의한 것으로 보인다. Fig. 6은 두 가지 모델에 대한 인공신경 망 학습을 위한 입력신호의 시간이력 변화를 나 타낸다 각각 두 모델의 미세진동 특징이 완전히 . 다름을 알 수 있다 이러한 특징을 가진 신호를.
의 인공신경망에 실시간으로 학습시켜가면 Fig. 4
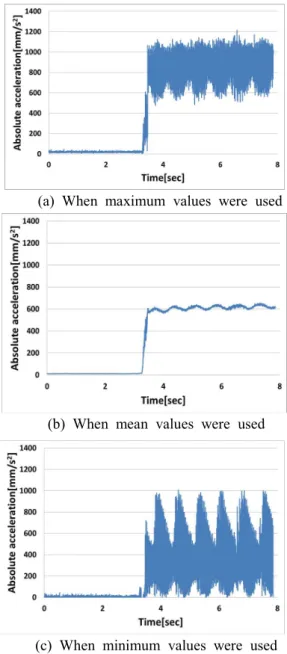
서 얻어진 model 1에 대한 출력을 Fig. 7에 나타 내었다. Fig. 7은 model 1에 대한 결과로서 Fig.
와 같은 입력데이터에 대한 결과를 나타내는 6(a)
데, 100개 데이터를 하나씩 증가시켜 가면서 학 습시킨 결과를 나타낸다. Fig. 7(a)는 최댓값을 학 습시켰을 때의 출력층의 변화를 나타내며, Fig.
와 는 각각 평균값과 최솟값을 학습 7(b) Fig. 7(c)
시켰을 때의 출력층의 변화를 나타낸다. Fig. 7의 출력층 값의 변화는 Fig. 6의 입력층에 사용된 학 습값과 다른 형태임을 알 수 있는데 이는 실시, 간으로 입력되는 신호에 대하여 출력층이 서로 다르게 구분해 낼 수 있음을 시사한다 최댓값. , 평균값, 최솟값으로 학습시켰을 때의 출력층의 값 중 평균값으로 학습시키는 것이 가장 안정적, 이고 명확한 결과를 보이고 있음을 알 수 있는 데 이는 실시간의 임의의 개수의 학습데이터를 , 평균한 값이 실시간 진단(diagnosis)의 신뢰성 확 보에 유리함을 시사한다.
은 에 대한 결과로서 와
Fig. 8 model 2 Fig. 6(b) 같은 입력데이터에 대한 결과이다. Fig. 8(a), Fig.
는 각각 최댓값 평균값 최솟값을 8(b), Fig. 8(c) , ,
개씩 실시간으로 입력층에 학습시켜 가면서 100
얻어진 출력층 값의 변화를 나타낸다 이들 그림. 에서도 알 수 있듯이 Fig. 6(b)의 경우에서와 같 이 입력층의 값과 출력층의 값이 서로 다른 특성 을 보이고 있음을 알 수 있으며 평균값을 학습, 시킨 결과가 가장 안정적이면서 명확한 값이 출
(a) When maximum values were used
(b) When mean values were used
(c) When minimum values were used Fig. 7 Real-time output data of the artificial neural
network for three different learning data (model 1)
력층에 나타나고 있음을 알 수 있다 이는 . model 의 경우에서와 마찬가지로 실시간의 임의의 개 1
수 의 학습 데이 터를 평균 한 값 이 실시 간 진 단 에 유리함을 의미한다 따라서 학습데
(diagnosis) .
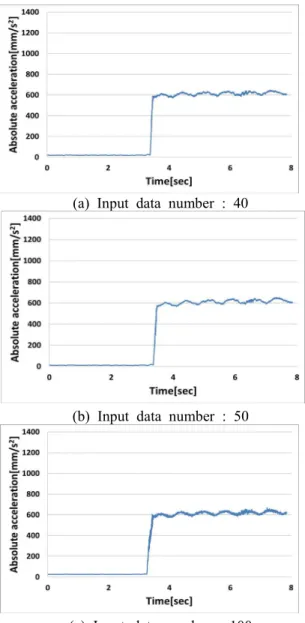
이터용 평균을 위한 개수를 10개에서부터 200개 까지 10씩 증가시켜가면서 모니터링 성능을 평가 하였다. Fig. 9(a), Fig. 9(b), Fig. 9(c)는 각각 40개,
개 개 의 입력데이터의 평균이 출력층 학 50 , 100
습데이터로 사용되었을 때의 출력값 변화를 나타 낸다 지면 제약상 비교가 될 만한 결과만을 나. 타내었는데 입력층 데이터의 개수가 , 50개일 때 가 가장 안정적이면서 데이터의 리플(ripple)성분
(a) When maximum values were used
(b) When mean values were used
(c) When minimum values were used
Fig. 8 Real-time output data of the artificial neural network for three different learning data (model 2)
도 선명함이 확인될 수 있다 이는 인공신경망을 . 이용한 실시간 모니터링을 위해서는 측정대상의 특징에 따라 다를 수 있겠지만 본 연구에서는 , 출력층 학습에 필요한 입력데이터 평균을 위한 개수가 50개가 최적임이 확인되었다.
실제 배관 적용 3.2
은 실제 가스배관 공기 에 대하여 구축
Fig. 10 ( )
된 모니터링시스템을 적용하였을 때의 장치사진 을 나타낸다 전술의 모니터링 시스템 검증을 위. 한 휴대폰 시험 경우에서와 같이 가스배관의 표, 면 그림의 원으로 표시된 ( inspection point부 에 )
과 같은 교정판 을 부착하
Fig. 3 (calibration target)
(a) Input data number : 40
(b) Input data number : 50
(c) Input data number : 100
Fig. 9 Real-time output data of the artificial neural network for three different number of input learning data (model 1)
Fig. 10 Inspection point in a gas piping system 여 이를 170mm의 거리에서 매크로렌즈가 장착된 고속카메라(500Hz, 1k x 1k pixel)로 배관의 미세
Fig. 11 Measured acceleration values under valve closed
진동을 영상화 하였다 이 영상을 기술한 바와 . 같이 구축된 입자영상유속계 및 인공신경망에 적 용하였다.
시스템에 대한 모니터링 조건으로서, (1)valve가 되어 에 공기가 전혀 공급되고 있지 close cylinder
않을 때, 즉 cylinder가 작동하지 않을 때와
가 작동되어 에 공급되면서 실
(2)valve open cylinder
린더가 작동되고 있을 때 즉 공기의 흐름이 발, 생하게 될 때에 실시간 모니터링을 실시하였다.
은 전자의 경우인 가 닫혔을 때의 가
Fig. 11 valve
속도데이터의 시간변화를 나타내는데 작동이 없, 을 때에도 아주 미세한 가속도 값이 존재함을 알 수 있는데 이는 배관시스템 전체의 진동으로 볼 수 있다. 한편, 배관시스템과 카메라시스템과의 연동된 진동영향을 피하기 위하여 카메라시스템 은 방진용 스펀지를 이용하여 격리시켰다.
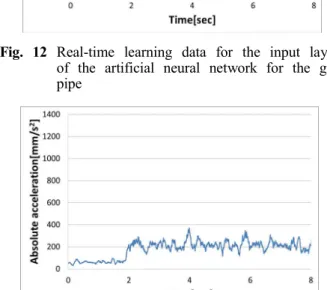
는 가 작동되었을 때의 인공신경
Fig. 12 valve open
망의 입력층에 학습용으로 실시간 사용된 가속도 데이터를 나타내며, Fig. 13은 인공신경망의 출력층 에서 실시간으로 얻어낸 값의 변화를 나타낸다. 2초 근방에서 단위계단함수(step function)과 같은 응답특 성을 보이고 있음을 알 수 있다 이는 구축된 인공. 신경망 모니터링시스템이 논리회로(logic circuit)의
과 과 같이 명확한 판정을 실시간으로 내릴 수
‘0’ ‘1’
있음을 의미한다 이는 또한 . cylinder를 구동시키기 위해 valve open용 전기적 신호가 원격에 있는 제어 실(control)로부터 배관망에 공급되었다 할지라도 배 관이 설치된 현장의 기계적 고장으로 인해 정상작 동이 되지 않았을 때에 비접촉식으로 제 의 감지 3 보완기능이 가능함을 의미한다 즉 배관의 아주 미. , 세한 진동으로부터 배관요소들의 작동상태 진단 가 능성을 시사한다.
Fig. 12 Real-time learning data for the input layer of the artificial neural network for the gas pipe
Fig. 13 Real-time output data of the artificial neural network for the gas pipe
3. 결 론
원자력 발전소나 플랜트에서의 배관망처럼 작 업자의 접근이 어려운 상태에서 배관망의 밸브, , 필터 실린더 등과 같은 요소의 작동이 전기적으, 로는 정상적이지만 기계적으로 고장이 났을 때 감지할 수 있는 방법이 없다 본 연구에서는 이. 러한 상황에 대처하기 위하여 원격 비접촉식으로 배관의 아주 미세한 진동을 감지함으로써 배관망 의 기계적 고장을 진단할 수 있는 기술을 개발하 고자 하는 것이 연구의 목적으로 삼았다 세부적 . 성과로서는 다음으로 정리될 수 있다.
유체유동의 속도장 측정법인 입자영상유속계 기술과 인공신경망 (particle image velocimetry)
이론을 적용하여 배관망 (artificial neural network)
의 실시간 작동상태 진단이 가능하였다.
기존의 진동측정 방식인 푸리에변환을 이용하 는 비실시간 방식과 달리 측정대상의 실시간의 미세진동의 가속도 성분을 이용하여 배관망에 대 한 실시간 작동상태 진단을 구현하였다.
로 배관망의 작동상태를 실시간으로 진단할 수 있는 인공신경망 기반의 모니터링 시스템이지만 향후 원거리에서도 가능한 시스템으로 구축하고 자 한다.
후 기
본 연구는 한국연구재단 일반연구과제(NRF- 의 일환으로 수행되었습니다
2014R1A1A4A01005191) .
참고문헌
(References)
(1) Adrian, R. J., 1991, “Particle-Imaging Techniques for Experimental Fluid Mechanics," Ann. Rev. J.
Fluid Mech., Vol.23, pp.261~304.
(2) Machida, K., Okamura, H., Hirano, T. and Usui, K., 2001, "Stress Analysis of Mixed-Mode Crack of Homogeneous and Dissimilar Materials by Speckle Photography," Transactions of the Japan Society of Material Engineers, Vol. 67, No. 655, pp.86~91.
(3) Braun, S., 1975, "The Extraction of Periodic Waveforms by Time Domain Averaging," Acustica, Vol. 32, No. 2, pp.69~77.
and Doh, D. H., 2013, "Measurements of Remote Micro Displacements of the Piping System and a Real Time Diagnosis on Their Working States Using a PIV and a Neural Network," Trans. of the Korean Hydrogen and New Energy Society, Vol.
24, No. 3, pp. 264~274.
(6) Rumelhart, D. E., Hinton, G. E. and Williams, R. J., 1986, "Learning representations by back-propagating errors," Nature, pp. 323~333.
(7) Utami, T. and Blackwelder, R. A., 1991, "A Cross Correlation Technique for Velocity Field Extraction from Particulate Visualization," Exp. in Fluids, Vol.10, pp.213~223.
(8) Kimura, I., Takamori, T. and Inoue, T., 1986,
"Image Processing Instrumentation of Flow by using Correlation Technique," Journal of Flow Visualization and Image Processing, Vol. 6, No.22, pp.105~108.
(9) Nobach, H. and Bodenschatz, E., 2009, "Limitations of Accuracy in PIV due to Individual Variations of Particle Image Intensities," Exp. in Fluids, Vol. 47, pp. 27~38.