소자를 사용한 고속전철용 추진제어장치
IGCT (MOTOR-BLOCK)
Propulsion System(Motor-Block) for High-Speed Train using IGCT Device
조현욱† ․ 김태윤*․ 노애숙**․ 장경현***․ 이상준****․ 최종묵*****
Hyun-Wook Cho, Tae-Yun Kim, Ae-Sook Kno, Kyung-Hyun Jang, Sang-Jun Lee, Jong-Mook Choi
여기에 서론을 입력하시오.
서 론 1.
고속전철 기술개발 사업은 고속전철을 통 G7
한 국가 경쟁력 향상을 도모하기 위해 산 학 연・ ・ 공동으로 1996년 12월부터 2002년 10월까지 총 년간 각6 3년씩 2단계로 진행되어 시제차 1편 성 7량으로 제작되었다.
년 월부터 현재까지 단계가 진행중이
2002 11 3
며 지난 2004년 12월에는 최종목표인 350km/h 속도 증속시험을 통해 354.7km/h까지 시험 완 료한 상태이며 현재는 실용화를 위한 안정화 시, 험이 진행되고 있다.
본 논문에서는 개발된 한국형 고속전철의 추진 시스템인 주 전력변환장치에 대한 내용으로 시스 템 사양과 안정화 시험을 통한 시험결과 등이 기 술된다. G7 고속전철 기술개발 사업 단계에서 개 발된 주 전력변환장치는 단상 교류전원을 공급받 아 직류전원으로 변환하는 장치인 컨버터부와 직 류전원을 다시 3상 교류전원으로 변환하여 견인전 동기를 구동하는 인버터부, 그리고 컨버터부 인버터부 및 견인전동기의 냉각을 Stack, Stack
위한 FAN 구동용 인버터인 Ventilation용 인버터 부로 구성된다 주회로 전력반도체 소자는. IGCT 를 사 (Integrated Gate Commutated Thyristor) 용하였고, 컨버터부는 4상한 PWM컨버터 2대를 병렬운전하고 인버터부는 전압과 주파수를 동시에, 제어하는 가변전압 가변주파수, (Variable Voltage 제어 방식을 적용하 Variable Frequence, VVVF)
였으며 출력량 제어방법으로, Pulse폭 제어(Pulse 방식을 사용하였다 Width Modulation, PWM) .
조현욱: ( )주 로템 기술연구소 전장품개발팀 연구원
†
E-mail : [email protected]
TEL : (02)746-1341 FAX : (02)746-1897
김태윤 주 로템 기술연구소 전장품개발팀 주임연구원
* : ( )
노애숙 주 로템 기술연구소 전장품개발팀 선임연구원
** : ( )
장경현 주 로템 기술연구소 전장품개발팀 선임연구원
*** : ( )
이상준 주 로템 기술연구소 전장품개발팀 책임연구원
**** : ( )
최종묵 주 로템 기술연구소 전장품개발팀 수석연구원
***** : ( )
This paper introduces the propulsion system(Motor Block) stabilization test result for Korean High Speed Railway(HSR). The developed propulsion system using high power semiconductor, IGCT(Integrated Gate Commutated Thyristor) consists of two PWM converter and VVVF inverter. In this paper, overall configuration of propulsion system is briefly described and stabilization tests are made to verify the developed propulsion system. The presented test results shows beatless control method of inverter output current at the 200km/h and performance test of BCH.
Keywords : Motor Block, IGCT, BCH, Stabilization test for propulsion system Abstract
PC1
25kV S/W VCB VCB
M/B
#1 T/M
M/B T/M
#2 T/M
M/B T/M
#3 T/M
T/M T/M
T/M T/M
M/B
#6
M/B
#5
T/M T/M
M/B
#4
Aux.
Block
670V DC line Aux.
Block
T/M
Aux. Tr.
2,930kVA
TM1 TT2 TT3 TT4 TM5 PC2
2,400kW x 6EA 1,100kW x 12EA
ESK
1400kW (350kW x 4EA)
1400kW (350kW x 4EA) 25kV
PC1
25kV S/W VCB VCB
M/B
#1 T/M
M/B T/M
#2 T/M
M/B T/M
#3 T/M
T/M T/M
T/M T/M
M/B
#6
M/B
#5
T/M T/M
M/B
#4
Aux.
Block
670V DC line Aux.
Block
T/M
Aux. Tr.
2,930kVA
TM1 TT2 TT3 TT4 TM5 PC2
2,400kW x 6EA 1,100kW x 12EA
ESK
1400kW (350kW x 4EA)
1400kW (350kW x 4EA) 25kV
그림1. 주 전력변환장치(Motor Block) 차량 배치도
ACPT ACCT1
ACCT2 K2 K1 AK
G1U G1V
G1X G1Y
G2U G2V
G2X G2Y
CHRe DCCT1 DCCT2
DCPT
M1
M2 CTU
CTV CTW
GU GV GW
GX GY GZ
GOV
PG1A PG1B
PG2A PG2B OVRe
CF
Converter C ontroller
Inverter C ontroller
Traction Control U nit RS485
TCN (M VB +W TB )
A C25kV
C ontrol &
M onitoring signal
C /I C ontrol Electronic
Rack
ACPT ACCT1
ACCT2 K2 K1 AK
G1U G1V
G1X G1Y
G2U G2V
G2X G2Y
CHRe DCCT1 DCCT2
DCPT
M1
M2 CTU
CTV CTW
GU GV GW
GX GY GZ
GOV
PG1A PG1B
PG2A PG2B OVRe
CF
ACPT ACCT1
ACCT2 K2 K1 AK
G1U G1V
G1X G1Y
G2U G2V
G2X G2Y
CHRe DCCT1 DCCT2
DCPT
M1
M2 CTU
CTV CTW
GU GV GW
GX GY GZ
GOV
PG1A PG1B
PG2A PG2B OVRe
CF
Converter C ontroller
Inverter C ontroller
Traction Control U nit RS485
TCN (M VB +W TB )
A C25kV
C ontrol &
M onitoring signal
C /I C ontrol Electronic
Rack
그림2. 주 전력변환장치(Motor Block) 주 회로도
주 전력변환장치
2. (Motor Block) 주 전력변환장치 구성
2.1
주 전력변환장치는 그림 과 같이1 PC1, PC2 Car에 각각 2대씩, TM1, TM5에 각각 1대씩의 주 전력 변환장치(Motor Block)가 탑재되어 2대의 견인전동기(Traction Motor)를 제어하도록 구성 하였으며 주 전력변환장치의 주 회로도를 그림 2에 나타내었다.
회로도에서 보듯이 입력 AC 25,000V를 수전하여 주 변압기(Main Transformer)를 통해 주 전력변환 장치의 단상 컨버터 2병렬 구조로 AC 1,400V를 공급하여 직류 전압 2,800V를 제어하게 되고 다시 인, 버터를 통해 견인전동기로 0 〜 2,183V를 출력하게 된다.
여기에서 개발된 제어기는 운전석으로부터 인가된 요구 신호가 TCU(Traction Control Unit)로 인가 되면 TCU-C/I Control Electronic Rack간 RS-485 통신을 통해 운전모드 지령이 주 전력변환장치로 전달되어 제어를 수행하게 된다.
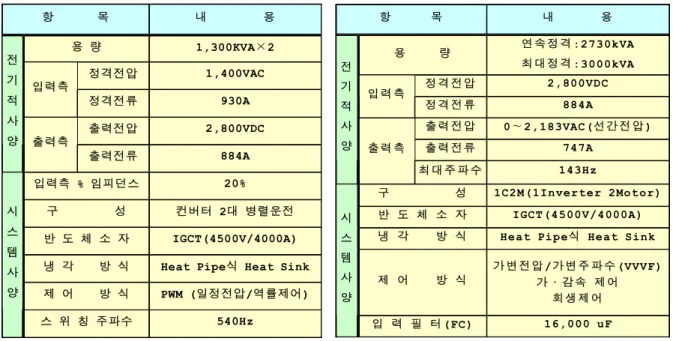
주 전력변환장치 주요 사양 2.2
표 에 주 전력변환장치의 컨버터부 및 인버터부 주요 사양에 나타내었다1 .
시스템의 전력 반도체 소자는 IGCT(Integrated Gate Commutated Thyristor)를 사용하였고 냉각방식, 은 Heatpipe식 강제냉각 방식을 채용하여 Stack 구성을 컨버터부와 인버터부가 호환이 가능하도록 설계 하였다.
시스템 용량은 최대정격이 3MVA급으로 설계되었고 컨버터부 제어는 병렬 컨버터의, PWM 방식을 채 용 하였고 인버터부 제어는, VVVF 가 감속 제어를 채택하였다・ .
컨버터 1대의 주 전력변환장치가 2대의 Motor를 제어하는 1C2M방식으로 구성 하였고 인버터 출력전, 압은 0〜2,183VAC로 제어하도록 하였다.
표 1. 주 전력변환장치 사양
항 목 내 용
용 량 1,300KVA×2
정격전압 1,400VAC
입력측
정격전류 930A
출력전압 2,800VDC
전 기 적 사
양 출력측
출력전류 884A
입력측 % 임피던스 20%
구 성 컨버터 2대 병렬운전 반 도 체 소 자 IGCT(4500V/4000A) 냉 각 방 식 Heat Pipe식 Heat Sink 제 어 방 식 PWM (일정전압/역률제어) 시
스 템 사 양
스 위 칭 주파수 540Hz
컨버터 사양
항 목 내 용
용 량 1,300KVA×2
정격전압 1,400VAC
입력측
정격전류 930A
출력전압 2,800VDC
전 기 적 사
양 출력측
출력전류 884A
입력측 % 임피던스 20%
구 성 컨버터 2대 병렬운전 반 도 체 소 자 IGCT(4500V/4000A) 냉 각 방 식 Heat Pipe식 Heat Sink 제 어 방 식 PWM (일정전압/역률제어) 시
스 템 사 양
스 위 칭 주파수 540Hz
컨버터 사양
항 목 내 용
용 량 연 속 정 격 :2730kVA 최 대 정 격 :3000kVA 정 격 전 압 2,800VDC 입 력 측
정 격 전 류 884A
출 력 전 압 0∼ 2,183VAC(선 간 전 압 ) 출 력 전 류 747A
전 기 적 사
양 출 력 측
최 대 주 파 수 143Hz
구 성 1C2M(1Inverter 2Motor) 반 도 체 소 자 IGCT(4500V/4000A) 냉 각 방 식 Heat Pipe식 Heat Sink
제 어 방 식
가 변 전 압 /가 변 주 파 수 (VVVF) 가 · 감 속 제 어
회 생 제 어 시
스 템 사 양
입 력 필 터 (FC) 16,000 uF
인버터 사양
항 목 내 용
용 량 연 속 정 격 :2730kVA 최 대 정 격 :3000kVA 정 격 전 압 2,800VDC 입 력 측
정 격 전 류 884A
출 력 전 압 0∼ 2,183VAC(선 간 전 압 ) 출 력 전 류 747A
전 기 적 사
양 출 력 측
최 대 주 파 수 143Hz
구 성 1C2M(1Inverter 2Motor) 반 도 체 소 자 IGCT(4500V/4000A) 냉 각 방 식 Heat Pipe식 Heat Sink
제 어 방 식
가 변 전 압 /가 변 주 파 수 (VVVF) 가 · 감 속 제 어
회 생 제 어 시
스 템 사 양
입 력 필 터 (FC) 16,000 uF
인버터 사양
본선 시운전을 통한 안정화 시험 3.
주 전력변환장치의 출력 안정화 3.1
본선 시운전중 동력 객차에 설치되어 있는 주 전력변환장치가 200km/h이상 고속 구간에서 출력전류 이상으로 흔들림 현상이 발생 하였다.
현차에서 원인 분석 및 시험의 한계로 차량에서 탈거 후 공장 이송 및 공장 내 시험으로 원인분석을 시험 실시하여 출력 전류에 대한 안정화를 실현하였다.
그림 3의 a)는 200km/h 속도대에서 발생한 출력전류 이상현상이며 b)는 전류 맥동현상 조치완료 후 정상적인 동작을 하는 파형을 나타낸다.
출력 전류 속도
출력전류 이상 파형 a)
출력전류 속도 (280km/h)
조치 후 출력전류 파형 b)
그림3. 출력전류 이상 및 조치 후 파형
저항제동 기능 구현 3.2
사 구간 진입 또는 가선 전압이 AC 29kV 이상으로 가선이 회생 전력을 수용할 수 없을 경우 저항 제 동을 실시한다 저항 제동으로 생기는 제동력은. BCH를 통해 저항으로 소비된다.
유도전동기는 기동 시 회전자의 자속이 형성되어야 하므로 발전 제동을 위해서는 충분한 DC링크 전압의 확 보가 중요하다. 그래서 회전자에 별도의 전류공급원을 가지는 동기전동기와 달리 유도전동기는 DC
저항 제동 실시 조건 발생
인버터 게이팅
차단 VCB 차단
컨버터 게이팅 차단 링크 전압으로
전동기에 자속 저항 제동 동작 생성
제동 신호 해제 저항 제동 실시 저항 제동 중단 조건 해제
투입 정상 동작 VCB
C/I
그림4. 저항 제동 시퀀스
5.
링크 전압의 크기에 따라 저항제동 동작에 제약이 따르게 된다 그림 는 본 장치에서 구현한 저항 제동 동작. 4 시퀀스이다.
그림 는 저항제동 기능을 구현한 시험 파형으로5 DC링크 전압이 초기 자속 형성 시에 급격히 감소하였다가 저항 제동력에 의해 다시 상승하는 것을 볼 수 있다.
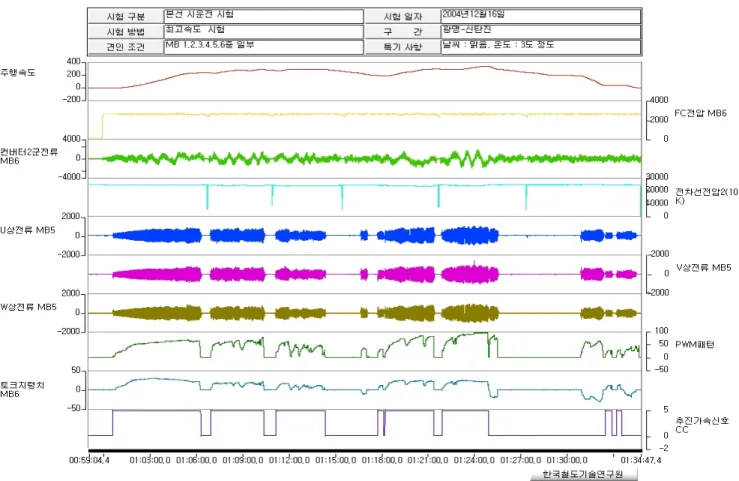
증속시험 성공 3.3 350km/h
본선 시운전을 통해 타 기기와의 인터페이스 문제 운행상의 시퀸스 문제 노이즈 문제 등을 해결 해, , 나가며 시험 운전 하였으며, 주 전력변환장치의 기능 안정화 시험과 병행하여 증속 시험은 2004년 10월28 일334km/h, 11월23일343km/h를 달성 하였고, 12월16일에354.7km/h 주행 시험을 달성 하였다.
링크전압 DC
토오크지령치
토오크실측치
그림 은6 354.7km/h 주행 시험 달성 시 주 전력변환장치 주행 성능시험파형으로 광명에서 신탄진 구간 까 지 주행 시험 시 측정한 것이다.
그림6. 주행 성능 시험 파형
결 론 4.
본 논문에서는 한국형 고속전철의 추진 시스템인 주 전력변환장치(Motor Block)의 본선 시운전을 통 한 안정화 시험단계에서 고속 주행 시 발생된 출력 전류의 맥동현상 제어와 저항제동 기능 구현을 통한 시스템의 안정화 시험 결과를 나타내었다 현재 본선 시운전을 통한 안정화 시험을 통해 개발된 주 전력. 변환장치는 국내뿐만 아니라 해외 고속전철 시장에도 수출될 전망이다.
참 고 문 헌
1. 주 전력변환장치 개발“ ,” ( )주 로템 단계 보고서1 , 1999년10월 2. 주 전력변환장치 개발“ ,” ( )주 로템 단계 최종보고서2 , 2002년12월
3. 고속철도기술개발사업 고속철도 차량시스템 안정화 기술개발“ ,” ( )주 로템 차년도 보고서2 , 2004년10월
4. 이광주 조성준 우명호 장성영 김두식, , , , (2005). “한국형 고속전철용 추진제어장치 개발,” 2005 수송기기 전기추진장치Workshop, pp.151-154.