MR 유체 입자 속도 계측을 위한 디지털 홀로그래피 현미경 시스템의 개발
He-Peng Chen
*· 강보선
†Development of Digital Holographic Microscopy System for Measurements of Particle Velocities in MR Fluids
He-Peng Chen and B. S. Kang
Key Words: Digital holographic microscopy(디지털 홀로그래피 현미경), Particle velocities(입자 속도), Magnetorheo- logical(MR) fluid(자기 유변 유체)
Abstract
In this study digital holographic microscopy system for measurements of 3-D velocities of particles in MR fluid is devel- oped. Holograms are recorded using either a CCD camera with a double pulse laser or a high-speed camera with a contin- uous laser. To process recorded holograms, the correlation coefficient method is used for focal plane determination of particles. To remove noise and improve the quality of holograms and reconstructed images, a Wiener filter is adopted. The two-threshold and image segmentation methods are used for binary image transformation. For particle pairing, the match probability method is adopted. The developed system will be applied to measurements of the characteristics of unsteady 3- D particle velocities in MR fluids through the next stage of this study.
1. 서 론
물체를 3차원적으로 기록, 재생할 수 있는 홀로그래 피는 측정 체적의 정보를 기록한 이후에, 다양한 방법으 로 재생함으로써 홀로그램에 저장된 많은 양의 측정 체 적 정보를 추출할 수 있다. 기존 광학적 홀로그래피를 급속하게 대체하고 있는 디지털 홀로그래피는 홀로그램 의 화학적 처리가 필요하지 않고 시스템을 단순화시킬 수 있으며, 실시간 분석이 가능하다는 여러 가지 장점으 로 인하여, 여러 분야에서 광범위하게 응용되고 있다(1).
매우 작은 측정 체적을 확대하여 기록하기 위해서는 디 지털 홀로그래피 현미경 시스템이 필요하다. 일반적인 광학 현미경은 배율이 높아질수록 물체의 초점 심도가 감소하는 한계가 있지만, 디지털 홀로그래피 현미경은 이러한 한계를 극복할 수 있다. 즉, 홀로그램으로 기록된 체적의 원하는 모든 단면을 컴퓨터로 재생하여, 입자의 크기, 모양, 3차원 속도 등과 같은 정보를 구할 수 있다.
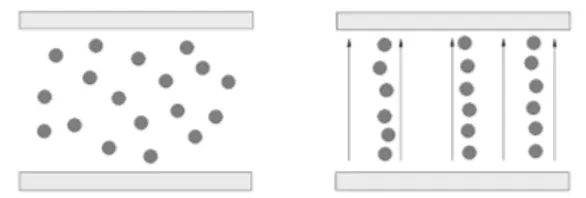
자기 유변 유체(MR, Magnetorheological Fluid)는 실 리콘 오일 또는 미네랄 오일 등의 비전도성 용매에 마 이크로미터 크기의 자성을 가질 수 있는 입자(예: 철 (Iron))을 분산시킨 유체이다(2). 이 유체는 Fig. 1에 나타 낸 것과 같이, 외부 자기장이 작용하지 않을 때는 입자 가 불규칙적으로 분산되어 등방성의 물리적 성질을 가 지지만, 외부 자기장이 가해지면 극성을 가진 입자들이 길게 체인 형태로 나열되어 비등방성의 구조를 가지면 서 유체의 물리적, 유변학적 성질이 변화하는 특성을 가
(Recieved: 9 Apr 2016, Recieved in revised form: 20 May
2016, Accepted: 23 May 2016)
*
전남대학교 대학원 기계공학과
†
책임저자, 회원, 전남대학교 기계공학부 E-mail : bskang@jnu.ac.kr
TEL : (062)530-1683 FAX : (062)530-1689
지고 있다(3).
외부 자기장 인가로 인한 MR 유체의 유변학적특성 변화는 자기장에 따라 입자들의 움직임에 기인하고 있 기 때문에 MR 유체 내 입자 이동에 대한 연구가 필수 적이다. 하지만, 지금까지의 MR 유체 구조에 대한 모든 연구들은 광학 현미경을사용하기 때문에 2차원적인 가 시화 및 분석에 국한될 수밖에 없었다. 또한, 고정적인 외부 자기장으로 인하여 MR 유체 내부의 입자 배열 구조가 정상 상태인 상황에 대해서만 연구가 진행되었
다(4,5). 외부 자기장 인가 순간부터 MR 유체 내부의 입
자 배열 구조의 비정상적인 변화는 주로 모사 방법 (simulation metheod)(6,7)에 의해 연구되었으며, 이를 뒷 받침하기 위한 실험적인 변환 현상 및 변환 속도에 관 한 연구는 많지 않다.
MR 유체는 선진국에서는 이미 상용화되었으며, 이를 이용한 응용장치는 다양한 분야에서 상용화를 시작하고 있다. 특히, 군용장비에 적용하는 경우는 시판 및 기술 전수를 꺼리고 있는 실정이다. 따라서, 독자적 기술력을 확보하기 위해서는 MR 유체 및 이를 활용한 MR 디바 이스에 대한 연구와 개발이 필요하다. 국내에서 MR 유 체에 대한 조성 및 상용화에 대한 실적은 아직 없으며, 상용화된 미국 Lord사의 MR 유체를 구입하여 자체적으 로 개발하고 있는 응용장치에 적용하고 있다. 미국의 Lord사는 유체 및 응용장치 등 관련 분야에서 연구 및 상용화에 가장 앞서고 있으며 자동차, 건물, 군용장비 등에 적용이 가능한 MR 댐퍼 및 MR 브레이크를 상용 화하고 있다. 미국 자동차 회사 GM도 자동차 부품회사 인 Delphi사와 Lord사가 공동으로 개발한 MR 댐퍼를 자사 제품에 적용하고 있다.
자기장 인가로 인한 MR 유체의 유변학적 특성 변화 에 대한 기존 연구는 광학 현미경에 의존할 수밖에 없 기 때문에 2차원적인 가시화 및 분석에 국한될 수밖에 없다. 또한, 고정적인 외부 자기장으로 인하여 MR 유체 내부의 입자 배열 구조가 더 이상 변화하지 않는 정상
상태인 상황에 대해서만 연구가 진행되었다. 3차원 체 적 전체를 시간 간격에 따라 기록할 수 있는 장점을 가 진 디지털 홀로그래피 현미경 시스템을 MR 유체 내 입 자 특성 계측에 적용시킨 사례는 현재까지 국내외적으 로 많지 않다고 볼 수 있다.
본 연구에서는 외부 자기장 인가에 의한 MR 유체 내 입자의 비정상 3차원 속도 측정을 위한 디지털 홀로그 래피 현미경 시스템을 구축하고자 한다. 이를 위하여 MR 유체 내 입자에 대한 홀로그램을 기록할 수 있는 광학시스템을 구축하고, 기록된 홀로그램에 대해 이미 지 처리를 통해서 입자의 3차원 속도를 측정할 수 있는 프로그램들을 개발하고자 한다.
2. 기본 원리
2.1 디지털 홀로그래피의 원리
광학적 홀로그래피와 마찬가지로 디지털 홀로그래피 도 홀로그램을 기록한 후 재생하는 두 단계를 거치지만, 기록 매체로 필름 대신에 CCD 카메라를 사용하고, 기 록된 홀로그램을 컴퓨터를 이용하여 수치적으로 재생한 다. 디지털 홀로그래피의 광학적 시스템 구성은 in-line 방식이나 off-axis 방식으로 구별되며, in-line 방식이 구 성의 단순함 때문에 광범위하게 사용되고 있다(8). In- line 디지털 홀로그래피의 개념을 Fig. 2에, 홀로그램의 기록 및 재생과 관련된 좌표들을 Fig. 3에 나타내었다.
확장된 레이저 빔이 기록 대상이 되는 물체 영역을 통 과하면서, 물체에 의해 회절되어 카메라 센서에 도달된 Fig. 1 The distribution of soft magnetic particles in MR
fluids
Fig. 2 Principle of in-line digital holography
Fig. 3 Coordinate system
레이저 빔이 물체파(objectbeam), O(ξ, η)가 되고, 물체 에 의한 굴절이 없이 도달한 빔은 기준파(reference beam)가 된다. 두 빔이 카메라 센서에서 중첩되면서 간 섭이 발생하고, 카메라 센서에 기록된 간섭 패턴이 홀로 그램, h(x, y)가 된다. 이 홀로그램을 기록 당시 사용한 기준광, ER(x, y)으로 다시 비추면 재생면에 재생 이미지, 가 나타나며, 이 회절은 Fresnel-Kirchhoff 적 분으로 나타낼 수 있다(8).
(1)
여기서 λ는 레이저 빔의 파장, ρ는 두 인접한 면에서 대응하는 두 점 사이의 거리로 다음과 같이 표현되며
(2)
d는 두 인접한 평면 사이의 거리이다.
2.2 홀로그램의 재생 방법
재생이미지 은 Fresnel 근사 방법이나 Convolution 방법으로 구할 수 있다(8). 두 재생방법을 비교 한 이전 연구(9)에서 Convolution 방법에 의해 재생된 이미 지의 해상도가 Fresnel 근사 방법보다 더 우수했기 때문에 본 연구에서는 Convolution 재생방법을 선택하였다.
Convolution 재생방법의 수학적 표현은 다음과 같다.
(3)
여기서 F, F−1은 퓨리에 및 역퓨리에 변환이다.
3. 디지털 홀로그램 기록 시스템
3.1 디지털 홀로그래피 현미경 시스템
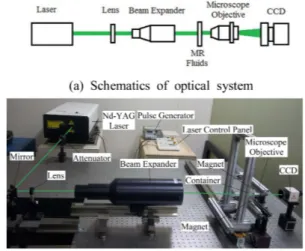
디지털 홀로그램을 기록하기 위한 기본적인 광학시스 템을 Fig. 4에 나타내었다. 홀로그램의 기록은 CCD 카 메라와 Nd-YAG 이중 펄스 레이저를 사용하거나, 고속 카메라의 경우는 Nd-YAG 연속 레이저를 사용하였다.
사용한 장비들의 구체적인 사양은 Table 1에 나타내었 다. 광원에서 나온 레이저는 빔확대기(beam expander)에 서 직경 10 cm의 평면파로 확대되어 MR 유체 탱크를 비추게 된다. MR 유체 탱크 내 입자에 의해 산란된 물 체파와 그대로 통과한 기준파는 대물렌즈(microscope objective)를 통과한 후 CCD 카메라에 간섭된 빔이 기록 된다. 기록된 홀로그램의 FOV(Field of View)는 CCD 카메라의 경우 1.21×1.21 mm, 고속카메라의 경우 1.71×1.71 mm이다.
이중 펄스 레이저와 CCD 카메라의 동기화를 위한 펄 R ξ ′, η′( )
R ξ ′, η′ ( ) = i λ ---
∞ –
∞
∫
∞ –
∞
∫ h x, y ( )E
R( x, y ) exp – i 2 π
--- λ ρ
⎝ ⎠
⎛ ⎞
---dxdy ρ
ρ = ξ ′ x( + )2+(η′ y– )2+d2
R ξ′, η′( )
R ξ′, η′( ) = F–1{F[h x, y( )]
·F[i λ---
exp[ i–2π
--- dλ 2+(x ξ′– )2+(y η′– )2] d2+(x ξ′– )2+(y η′– )2 ---]}
Table 1 Optical system components
Component Company Model Specifications
Nd-YAG pulse laser Quantel Brillant B 200 mJ, 10 Hz, λ = 532 nm Nd-YAG continuous laser CrystaLaser GCL-050-S 50 mW, λ = 532 nm
CCD camera Kodak ES4020 size 7.4 µm, 2,048×2,048 High speed camera Photron FastCamSA1.1 size 20 µm, 1,024×1,024, 60 fps
Pulse generator Berkeley 555 4 channels
Translation system Physik Instrumente M-531 precision: 33 nm Fig. 4 Digital holographic microscopy system
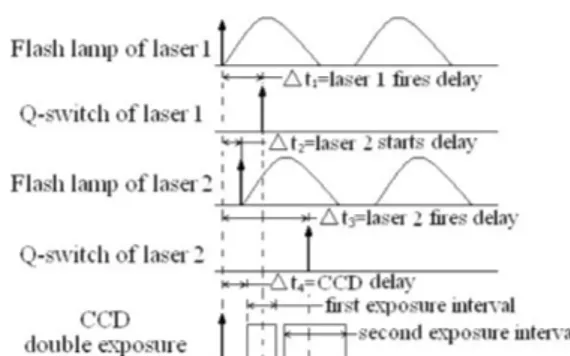
스 제어 시스템은 Fig. 5에 나타내었다. 펄스 발생기는 펄스 레이저 1, 2의 플래시 램프(flash lamp)를 적절한 시간 지연 ∆t2로 구동하고, CCD 카메라를 시간 지연
∆t4로 구동한다. CCD 카메라의 첫 번째, 두 번째 노출 시간 중에 Q-스위칭에 의해서 이중 레이저 펄스가 생성 되어 입자의 두 순간에서의 홀로그램을 기록하게 된다.
3.2 기록 체적
MR 유체 내 입자의 거동을 홀로그램으로 기록하기 위한 기록 체적을 Fig. 6에 나타내었다. MR 유체 탱크 의 크기는 수평 12 mm, 수직 15 mm, 폭 4 mm이다. 탱 크 안에는 실리콘 오일을 기본 유체로 하여 철 입자(평 균 직경 35 µm)가 분산되어 있으며 실험 전에 초음파에 너지를 가하여 입자간의 응집성을 최대한 제거하였다.
외부로부터 MR 유체에 자기장을 가하기 위하여 영구자 석(40×20×10 mm) 두 개를 MR 유체 탱크 중심으로부 터 78 mm 떨어진 위, 아래 위치에 순간적으로 설치하 였다. 외부 자기장의 세기는 가우스미터(Linkjoin, LZ- 643)로 측정하였으며, MR 유체 탱크 중심에서의 자기
장 세기는 0.41 kG이다.
4. 홀로그램 이미지 처리 시스템
홀로그램에서 재생된 입자 이미지는 일반적인 카메라 이미지와는 다르게 대개 초점 심도(depth of focus)가 매 우 크기 때문에, 초점면을 어떻게 결정하느냐가 입자 홀 로그래피 해석에 있어서 중요한 문제 중의 하나이다. 지 금까지 제안된 방법 중에는 강도를 이용하는 방법(10), Wavelet 변환에 의한 최대 크기를 이용하는 방법(11)등 이 있으며, 본 연구에서는 본 연구그룹에서 제안한 상관 계수법(12)을 사용하였다. 두 영상 F와 G에 대해 정의되 는 상관계수(CC, Correlation Coefficient)는 식 (4)와 같 이 정의되며, 두 영상간 유사성이 낮으면 0에 가까운 값, 유사성이 아주 높으면 1에 가까운 값을 갖는다.
(4)
여기서 m, n은 픽셀의 색인, 와 는 각 영상의 평균 명암값을 나타낸다.
Fig. 7은 상관계수를 이용한 광축 방향 위치 결정의 개략도이다. 입자이미지는 재생간격 ∆z로 층층이 재생 되며, 광축상의 임의 위치에서의 입자의 상관계수는, 그 평면의 앞뒤 일정거리(상관간격: ∆Cz)만큼 떨어져 있는 두 위치에서의 입자영상들 간의 상관계수로 정의된다.
입자의 초점면에서는 상관간격 만큼 떨어진 두 이미지 가 최대한 유사해야 하기 때문에 상관계수가 최대가 되 어야 한다. 따라서, 입자의 초점면은 상관계수 곡선의
CC =
∑
m∑
n (Fmn–F) G( mn–G)∑
m∑
n (Fmn–F)2∑
m∑
n (Gmn–G)2---
F G
Fig. 5 Control diagram of synchronization system
Fig. 6 MR fluid container and magnets Fig. 7 Correlation coefficient method
최대점으로 결정된다.
실제 기록되는 홀로그램은 실험 조건과 광학 부품에 의해 많은 노이즈를 포함하고 있기 때문에 이를 효과적 으로 제거할 수 있는 적절한 이미지처리 방법이 필요하 다. 이러한 목적으로 inverse 필터(13), subtraction 방법(14), Gaussian high pass and spectral 필터(15)등이 사용되고 있으며, 본 연구에서는 이러한 필터들을 검증해 본 결 과 가장 성능이 좋은 Wiener 필터(16)를 사용하였다.
임의의 광축 위치에서 재생된 액적 이미지는 배경과 의 명암 차이가 크지 않으며 스페클을 비롯한 잡음이 많기 때문에 적절한 이진화기준을 사용하여 이진화할 필요가 있다. 본 연구에서는 두 단계에 의해 계산된 이 진화기준을 적용하였다. 첫 단계의 이진화기준은 재생 이미지 평균값에 최저값을 더한 값을 사용하고, 두 번째 단계의 이진화기준은 첫 단계의 이진화기준보다 낮은 값만을 대상으로 한 평균값과 최저값을 더한 기준을 사 용하였다.
재생 이미지는 모든 영역에서 균일하지 않기 때문에 전체 영역에서 단일 이진화기준을 사용하여 이진화해 버리면 중요한 정보가 상실될 가능성이 높다. 따라서, 본 연구에서는 전체 영역을 작은 해석 영역으로 구분한 뒤 영역마다 다른 이진화기준을 적용하였다.
각 펄스의 재생된 액적 이미지에서 액적의 x, y 좌표 는 쉽게 결정되며, 광축인 z 좌표는 상관계수법을 사용
하여 구함으로써 각 펄스에서의 액적의 3차원 좌표가 구해진다. 다음 단계는 입자추적알고리즘을 적용하여 첫 번째와 두 번째 펄스에서의 동일 액적을 찾는 것이 며, 본 연구에서는 Baek과 Lee의 일치 확률(matching probability) 방법(17)을 이용하였다.
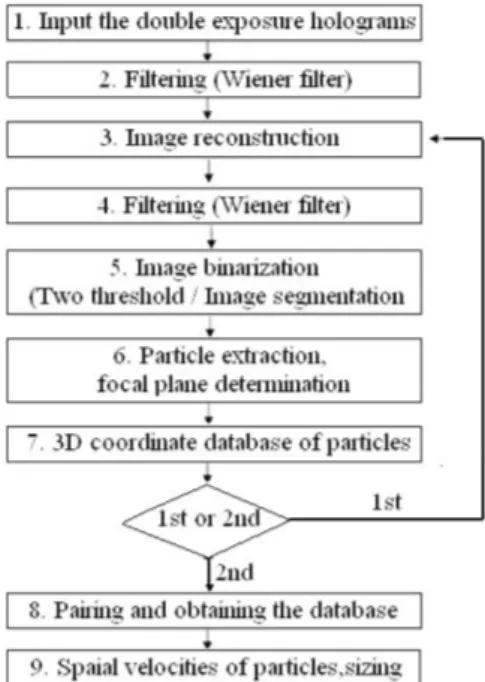
디지털 홀로그램의 기록 후 이미지 처리 흐름을 Fig.
8에 나타내었으며, 구체적인 처리 과정은 다음과 같다.
① 필요한 파라미터(레이저 파장, 픽셀 크기, 픽셀 수, 재생거리)의 값과 홀로그램 입력
② Wiener 필터 이용 홀로그램의 노이즈 제거
③ 홀로그램의 재생 및 노이즈 제거
④ 이미지의 이진화
⑤ 상관계수법을 이용한 입자 초점면 결정 및 입자의 3차원 좌표 추출
⑥ 입자추적알고리즘을 이용한 동일 입자 결정
⑦ 입자의 3차원 속도 결정
5. 결과 및 고찰
디지털 홀로그래피 현미경은 측정 체적의 이미지가 확대되어 기록되기 때문에 이미지 처리를 위해서는 확 대 배율을 결정해야 한다. 이를 위해서 홀로그램 기록 시스템을 사용하여 Fig. 9에 나타낸 테스트 자를 기록하 여 확대 배율을 결정하였다. 테스트 자는 1 mm를 100 등분하였기 때문에 눈금간 0.01 mm의 해상도를 가지고 있다. 테스트 자의 홀로그램과 초점면에서 재생된 이미
Fig. 8 Flow chart of hologram processing
Fig. 9 Test ruler
Fig. 10 Hologram and reconstructed image of test ruler
지를 Fig. 10에 나타내었다. Fig. 10(b)의 재생 이미지는 Fig. 11에 나타내었듯이 상관계수의 곡선으로부터 최대 점에 해당하는 광축 위치에서 재생된 이미지이다. 이러 한 과정을 거쳐서 구해진 확대 배율 M=32였으며, 실험 조건이 변경되는 경우에는 테스트 자를 기록하여 새로 운 확대 배율을 구하여 이미지 처리에 사용하였다.
Fig. 12는 MR 유체에 자기장을 순간적으로 인가한 직 후에 Nd-YAG 이중 펄스 레이저와 CCD 카메라를 사용 하여 기록한 대표적인 입자 홀로그램과 임의의 위치에 서 재생한 입자 이미지를 보여주고 있다. 이중 펄스의 시간 간격은 5 ms이다. 홀로그램에서는 입자의 회절 패 턴만 기록되기 때문에 초점이 맞는 입자를 확인하기가 어렵지만, 임의의 단면에서 재생된 이미지에서는 초점 이 맞는 여러 입자를 확인할 수 있다. Fig. 13은 MR 유
체에 자기장을 순간적으로 인가한 직후부터 고속카메라 를 사용하여 90초 동안 기록된 홀로그램으로부터 가급 적 초점이 맞는 입자가 많은 평면에서 재생된 입자 이 미지를 시간에 따라서 보여주고 있다. 사진에 표시한 것 과 같이 순간적으로 인가된 자기장으로 인하여 입자가 이동하는 것을 확인할 수 있다.
본 연구에서는 MR 유체 내 입자의 속도를 측정할 수 있는 디지털 홀로그래피 현미경 시스템의 개발에 초점 을 두었고, 다음 단계의 연구에서는 개발된 시스템을 사 용하여 자기장 세기 변화의 영향, 입자 속도의 공간 분 Fig. 11 Typical correlation coefficient curve obtained for
ruler hologram
Fig. 12 Typical double pulse holograms and their recon- structed images
Fig. 13 Reconstructed particle images from holograms showing particle movement with time
포 등과 같은 MR 유체 내 입자의 속도 특성에 대한 연 구를 수행할 계획이다.
6. 결 론
본 연구에서는 외부 자기장 인가에 의한 MR 유체 내 입자의 비정상 3차원 속도 측정을 위한 디지털 홀로그 래피 현미경 시스템을 구축하였다. MR 유체 내 입자에 대한 홀로그램을 기록할 수 있는 광학시스템을 구축하 였고, 기록된 홀로그램에 대해 이미지 처리를 통해서 입 자의 3차원 속도를 측정할 수 있는 프로그램들을 개발 하였다. 펄스 레이저를 이용한 이중 펄스 홀로그램과 연 속 레이저와 고속카메라를 이용한 홀로그램을 재생하여 시간에 따른 MR 유체 내 입자의 이동을 확인할 수 있 었다.
후 기
이 논문은 2014년도 전남대학교 학술연구비 지원에 의하여 연구되었습니다.
참고문헌
(1) U. Schnars and W. Jueptner, “Digital holography: digi- tal hologram recording, numerical reconstruction, and related techniques”, Springer, Berlin, 2005, pp. 80~85.
(2) P. Poddar, J. L. Wilson, H. Srikanth, J. H. Yoo, N. M.
Wereley, S. Kotha, L. Barghouty and R. Radhakrish- nan, “Nanocomposite magneto-rheological fluids with uniformly dispersed Fe nanoparticles”, J. Nanosci.
Nanotechnol., Vol. 4, 2004, pp. 192~196.
(3) Y. Yang, S. Huang and B. S. Kang, “Constitutive equa- tion of MR fluids”, J. Cent. South. Univ. Technol., Vol.
14, 2007, pp. 260~262.
(4) R. Patel, “Mechanism of chain formation in nanofluid based MR fluids”, J. Magn. Magn. Mater., Vol. 323, 2011, pp. 1360~1363.
(5) W. Jiang, Y. Zhang, S. Xuan, C. Guo and X. Gong,
“Dimorphic magnetorheological fluid with improved rheological properties”, J. Magn. Magn. Mater., Vol.
323, 2011, pp. 3246~3250.
(6) H. Li, X. Peng and W. Chen, “Simulation of the chain- formation process in magnetic fields”, J. Intel. Mater.
Syst. Struct., Vol. 16, 2005, pp. 653~658.
(7) M. R Jolly, J. D. Carlson and B. C. Munoz, “A model of the behavior of magnetorheological materials”, Smart Mater. Struct., Vol. 5, 1996, pp. 607~614.
(8) U. Schnars and W. Jueptner, “Digital holography”, Springer, 2005, pp. 41~53.
(9) Y. Yang and B. S. Kang, “Application of digital holog- raphy to sprays”, Proc. Asia Display, 2007, pp. 2050~
2054.
(10) F. Dubois, C. Schockaert, N. Callens and C. Youras- sowsky, “Focus plane detection criteria in digital holog- raphy microscopy by amplitude analysis”, Opt. Express, Vol. 14, 2006, pp. 5895~5980.
(11) C. B. Lefebvre, S. Coëtmellec, D. Lebrun and C. Özkul,
“Application of wavelet transform to hologram analy- sis: three-dimensional location of particles”, Opt. Laser Eng., Vol. 33, 2000, pp. 409~421.
(12) 추연준, 강보선, “홀로그래피 입자속도 측정시스템의 개발과 분무 액적에의 적용”, 한국액체미립화학회지, 제10권, 제3호, 2005, pp. 17~28.
(13) L. Denis, C. Fournier, T. Fournel and C. Ducottet,
“Twin-image noise reduction by phase retrieval in in- line digital holography”, Proc. SPIE, Vol. 5914, 2005, J1-J14.
(14) V. R. Singh and A. K. Asundi, “Amplitude contrast image enhancement in digital holography for particles analysis”, Proc. SPIE, Vol. 5878, 2005, pp. 17.1~17.8.
(15) S. Kim and S. J. Lee, “Effect of particle concentration on digital holographic PTV measurement”, Trans. of the Korea Society of Mech. Eng. B, Vol. 30, 2006, pp.
929~934.
(16) A. K. Jain, “Fundamentals of digital image processing”, Prentice-Hall, 1989, pp. 276~284.
(17) S. J. Baek and S. J. Lee, “A new two-frame particle tracking algorithm using match probability”, Exp. Flu- ids, Vol. 22, 1996, pp. 23~32.