† 책임저자 : 한국철도기술연구원 고속철도인터페이스연구실, 책임연구원 E-mail : [email protected], Tel : (031) 460-5321, Fax : (031) 460-5289 * 학생회원, 인하대학교 토목공학과, 석사과정
** 비회원, 인하대학교 토목공학과, 석사과정 *** 교신저자, 정회원, 인하대학교 토목공학과, 교수
E-mail : [email protected], Tel : (032) 876-7552, Fax : (032) 873-7560
NARX 신경망을 이용한 철도 궤도틀림 추정
Estimation of track irregularity using NARX neural network
김만철† 최배성* 김유희** 신수봉***
Man-Cheol Kim Bai-Sung Choi Yu-Hee Kim Soob-ong Shin
ABSTRACT
Due to high-speed of trains, the track deformation increases rapidly and may lead to track irregularities causing the track stability problem. To secure the track stability, the continual inspection on track irregularities is required. The paper presents a methodology for identifying track irregularity using the NARX neural network considering non-linearity in the train structural system. A simulation study has been carried out to examine the proposed method. Acceleration time history data measured at a bogie were re-sampled to every 0.25m track irregularity. In the simulation study, two sets of measured data were simulated. The second data set was obtained by a train with 10% more mass than the one for the first data set. The first set of simulated data was used to train the series-parallel mode of NARX neural network. Then, the track irregularities at the second time period are identified by using the measured acceleration data. The closeness of the identified track irregularity to the actual one is evaluated by PSD and RMSE.
1. 서 론 철도시설물의 안전성과 관계된 문제는 다양하지만 그 중 궤도구조는 차량주행에 직접적으로 관계된 구조로 많은 고려가 필요한 부분이다. 특히, 최근 열차의 고속화로 인해 궤도변형이 급속하게 진행되고 있으며 이러한 궤도틀림의 진전은 궤도의 변형을 유발하여 열차 주행을 방해하고 급기야 열차 주행의 안전성 문제로 이를 수 있는 주행면의 부정합, 즉 궤도틀림(Track irregularity)을 유발 할 수 있다. 궤도틀림은 열차의 반복운행 혹은 외부 환경의 작용에 의해 원래의 위치에서 상하 혹은 좌우방향으로 정적 혹은 동적인 변위가 발생하는 것을 의미하는 것으로, 현상에 따라 줄틀림, 면틀림, 궤간틀림, 수평 틀림, 평면성 틀림 등으로 분류하고 있다. 지금까지 이러한 궤도불규칙의 검측은 보선원 혹은 전용 궤도 검측차에 의해 수행되어왔다.[7] 그런데 보선원에 의한 검측은 매우 느리고 그 구간이 한정되어있을 뿐 만 아니라 검측수행은 영업운행이 모두 종료된 야간에만 수행이 가능하여 기존의 검측방법의 수행은 더 욱 어려워지고 있다. [9] 이론적으로 차량의 응답신호와 입력신호 사이에는 서로 선형성을 가지는 정상상태(steady state)이다. 하지만 실제 열차의 거동은 속도에 의존한 MIMO(Multi Input Multi Output) 시스템이며 특히, 이상개 소에서의 가속도 응답은 신호의 비선형성을 지니고 있다.[5] 따라서 비선형성을 고려한 궤도틀림을 추 정하는 기법이 요구되어 본 연구에서는 열차의 주행안정성 향상을 위한 비선형성이 고려된 궤도틀림 추 정 알고리즘을 개발하였다. 제안된 알고리즘을 수치예제에 적용하여 추정된 궤도의 RMSE(Root Mean
Square Error)를 평가하고, 동특성을 알아보는 PSD(Power Spectrum Density)를 비교해 보았다.
2. 해석 모델
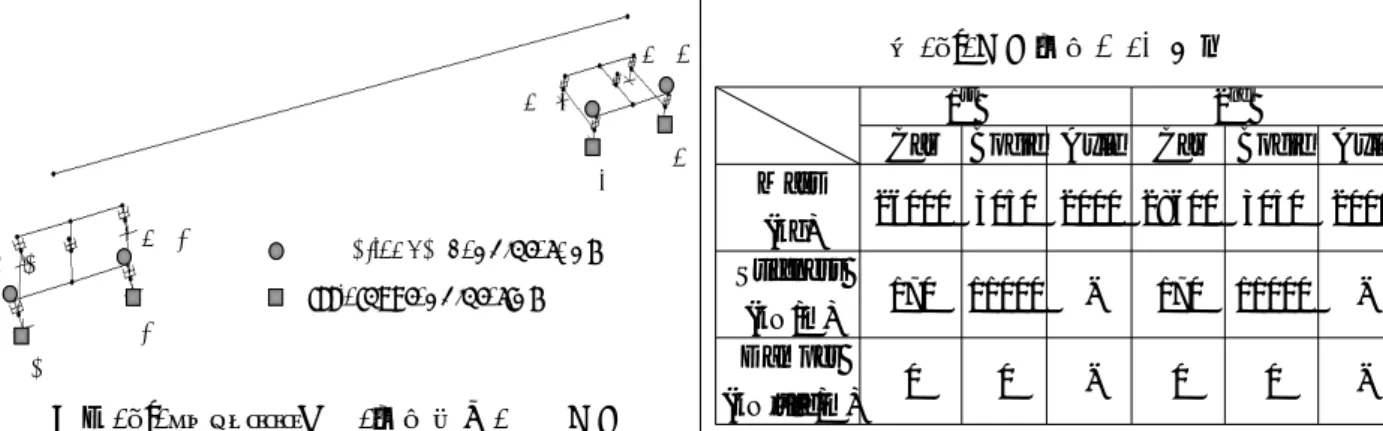
본 연구는 횡방향, 종방향 차량진동을 사용하여 궤도 틀림을 추정하는 알고리즘이다. 따라서 가속도응 답을 받을 수 있도록 FEA 상용프로그램인 SAP2000을 통해 시뮬레이션 하였다. 줄틀림과 면틀림을 시 간에 따라 변하는 지반 경계조건으로 고려하여 차륜 사이의 간격 및 차량의 속도에 따라 차륜별로 입력 하여 대차에서의 측정 점별 대차응답(acceleration response on bogie)을 구하였다.
설정된 구간을 기준 궤도틀림이라 정의하고 KTX 차량이 300km/h의 등속도로 주행하는 것으로 설정 하였다. 대차 가속도 응답신호는 기준 궤도틀림을 3차원 수치해석 모델 차축(IP1~IP4)에 적용하여 시 간 이력해석을 통하여 해석된 대차(CP1~CP4) 가속도 응답신호 중 IP1과 CP1의 신호이다.[6] IP1 IP2 IP3 IP4 CP1 CP2 CP3 CP4
Accel. Check Point (CP) Irr. Input Point (IP)
그림 1. SAP2000으로 모델링한 철도차량
1st 차량 2nd 차량
Car Bogie Axle Car Bogie Axle Mass (kg) 26000 3050 2000 28600 3050 2000 Stiffness (kN/m) 170 11000 - 170 11000 -Damper (kN·sec/m) 0 0 - 0 0 -표 1. 차량모델의 물성치 NARX 신경망을 통해 트레이닝 되는 데이터는 표 3.2의 1st 차량의 가속도응답과 기준궤도틀림이다. 알고리즘을 현장과 유사하게 묘사하기위해 2nd 차량질량을, 이전 차량질량에서 10% 증가된 값을 사용하 였다. 이후, 시간이력해석을 수행하여 대차에서 응답받은 가속도 신호를 통해 정의된 시스템으로부터 궤 도틀림 추정하였다. 3. NARX 신경망 이론 신경망은 뛰어난 사상 능력을 통해 임의의 비선형 함수들을 학습하거나 근사화할 수 있으며, 비선형 시스템을 모델링 하는데 유용하다.[2,3] NARX 모델은 일반적으로 시계열 모델링에 사용 되는 ARX 모 델을 바탕으로 구성되어있으며 NARX 모델의 수학적 정의는 아래 식(1)과 같이 나타낼 수 있다. (1) 여기서 와 는 각각 입력과 출력을 나타내고 , 는 입력과 출력의 차수를 의미한다. NARX 모델은 피드백을 고려한 신경망 회로로써, 선형 ARX모델을 기반으로 하기 때문에 일반적으로 Time series 모델링에 사용된다. NARX 모델의 구조를 살펴보면, TDL(Tapped Delay Line) 구조의 입력층 (inputs)과 은닉층, 출력층의 피드포워드망(feed-forward network)으로 구성된다. 각 층의 활성함수로 는 은닉층에 Tangent-sigmoid를 사용하고 출력층에서 선형 함수를 사용하였다.
본 논문에서 제안하는 비선형을 고려한 궤도틀림추정 알고리즘에 적용될 최적의 트레이닝 네트워크 구조를 찾기 위해 Layer 1의 뉴런의수와 Layer 2의 뉴런의수를 변화시켜가며 RMSE(Root Mean Square Error)를 식(2)와 같이 측정하였다.
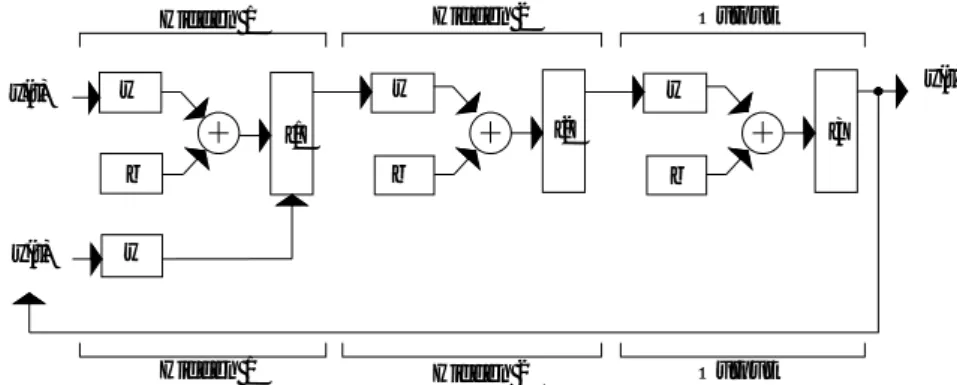
(2) 출력 신호 y(t)의 다음 값은 이전의 출력 신호와 독립적인 입력신호에 의해 회귀되어지고 함수가 최 적해에 접근하기 위해 전방향 신경망회로(Feed Forward Neural Network)를 사용하여 실행된다. 본 논 문에서 사용된 신경망구조는 그림 2 와 같으며 두 층의 전 방향 신경망 회로는 근사치를 위해 사용된 다. 또한, 신경망회로의 학습을 위한 역전파 과정에 서, 수렴 속도가 빠르고 안정성이 높은 비선형 최적 화 알고리즘인 Levenberg-Marquardt 알고리즘을 적용하였다. 이 알고리즘은 Hessian 행렬을 계산하지 않고 뉴턴 방법(Newton method)을 근사할 수 있어 보다 빠르고 안정적으로 국소 최적 해를 찾을 수 있는 장점이 있다. w b f1 f2 f3 y(t) x(t) y(t) w w w b bHidden 1 Hidden 2 Output
Hidden 1 Hidden 2 Output
그림 2. 알고리즘에 사용된 NARX 신경망 구조
NARX 신경망의 트레이닝에는 Parallel architecture와 Series-Parallel architecture 방법이 있다. 그 중에서 전방향 신경망 회로의 입력값을 더 정확하게 할 수 있고, 신경망 회로를 전적으로 전방향으로 구성하여 정적 백프로파게이션(back-propagation) 트레이닝이 가능한 Series-Parallel architecture를 사용하였다.
(a) Parallel architecture (b) Series-parallel architecture 그림 3. NARX 네트워크 구조 4. 궤도틀림 추정 수치예제 검증을 위해 같은 KP구간을 초기 정의된 차량과, 10% 차량질량이 추가된 모델을 사용하여 시간이력해석을 수행하였다. 초기 정의된 모델로부터 획득한 가속도 응답과 입력 자료인 궤도틀림으로 부터 트레이닝을 수행하였다.
신경망은 뉴런의 개수가 많아질수록 계산이 복잡해지기 때문에 가능한 뉴런의 개수가 적을수록 계산 량을 줄일 수 있다. 따라서 적절한 뉴런의 개수와 지연(delay)의 설정이 중요하다. 입력 지연 범위를 다 섯개로 고정시키고, Layer 1의 뉴런 개수를 9에서 15개, Layer 2의 뉴런 개수를 5에서 15개로 변화시 켰을 때의 RMSE(Root Mean Square Error)를 평가하여 최적 시스템을 식별하였다.
9 10 11 12 13 14 15 5 6 7 8 9 10 11 12 13 14 15
The number of neuron on layer 1
The num ber of neu ron on lay er 2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 x 10-3 (a) 1st 차량 줄틀림 RMSE 9 10 11 12 13 14 15 5 6 7 8 9 10 11 12 13 14 15
The number of neuron on layer 1
The num ber of neu ron on lay er 2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 x 10-3 (b) 2nd 차량 줄틀림 RMSE 9 10 11 12 13 14 15 5 6 7 8 9 10 11 12 13 14 15
The number of neuron on layer 1
The num ber of neu ron on lay er 2 2 3 4 5 6 7 8 9 x 10-4 (c) 1st 차량 면틀림 RMSE 9 10 11 12 13 14 15 5 6 7 8 9 10 11 12 13 14 15
The number of neuron on layer 1
The num ber of neu ron on lay er 2 2 3 4 5 6 7 8 9 x 10-4 (d) 2nd 차량 면틀림 RMSE 그림 4. 뉴런의 변화에 따른 최적 시스템 식별 등고선 그림 4에서와 같이 뉴런의 변화에 따른 1st 차량과 2nd 차량 RMSE의 등고선이 일치하다는 것은, 차량 의 질량이 변화하더라도 대차 진동응답과 궤도틀림 사이의 시스템이 변화하지 않음을 의미한다. 횡방향 궤도틀림을 추정하는 최적의 뉴런의수는 Layer 1에 14개, Layer 2의 13개일 경우 가장 적은 RMSE를 갖는다. RMSE는 신호간의 오차를 제곱하고 평균을 낸 후 루트를 적용한 것으로 RMSE가 적을수록 원 하고자 하는 신호를 정확하게 추정한 것이다. 표 2는 최적 신경망 레이어의 뉴런의 수로 최적화된 순으 로 정렬하였다. 횡방향 궤도틀림-대차가속도 시스템 식별 종방향 궤도틀림-대차가속도 시스템 식별 Layer 1 Layer 2 1st 차량 RMSE 2nd 차량
RMSE Layer 1 Layer 2
1st 차량 RMSE 2nd 차량 RMSE 14 13 0.000386 0.000386 15 12 0.000117 0.000115 15 14 0.000379 0.000379 15 15 0.000122 0.000121 14 14 0.000438 0.000438 14 14 0.000144 0.000145 15 12 0.000438 0.000439 15 14 0.000167 0.000164 15 13 0.000499 0.000499 13 6 0.000164 0.00017 표 2. NARX 신경망을 통한 최적 시스템 식별
200 250 300 350 400 450 500 550 -0.01 -0.005 0 0.005 0.01 KP (km) N or m al iz ed t rac k irr egul arit y Base Identified (a) 횡방향-가속도 응답을 통해 추정된 궤도틀림 비교 200 100 50 25 12.5 6.3 3.2 0 0.2 0.4 0.6 0.8 1x 10 -5 Wavelength (m) Pow er /wav el engt h( dB/ m ) Base Identified (b) 동특성 비교 200 250 300 350 400 450 500 550 -4 -3 -2 -1 0 1 2 3 4x 10 -3 KP (km) N or m al iz ed t rac k irr egul arit y Base Identified (c) 종방향-가속도 응답을 통해 추정된 궤도틀림 비교 200 100 50 25 12.5 6.3 3.2 0 1 2 3 4 5 6x 10 -6 Wavelength (m) Pow er /wav el engt h( dB/ m ) Base Identified (d) 동특성 비교 그림 5. NARX 신경망을 통한 궤도틀림 추정 결과 5. 결론 본 연구에서는 기존의 궤도불규칙 검측의 어려움과 비경제적인 검측을 해소하기 위해 비선형성을 고려한 궤도틀림 추정 기법을 제안한다. 기존 등가 SISO 웨이브렛 전달함수를 통한 궤도틀림 식별은 차 량의 응답신호와 입력신호 사이에 서로 선형성을 가지는 정상상태라는 가정 하에 적용되는 알고리즘이 다.[8] 하지만 실제 KTX열차의 거동은 속도에 의존한 MIMO(Multi Input Multi Output) 시스템이며 특히, 이상개소에서의 가속도 응답은 신호의 비선형성을 지니고 있어 이를 고려한 NARX 신경망을 통해 궤도틀림을 추정하였으며 다음과 같은 사항이 정리되었다. ① 기준 궤도틀림과 3차원 수치해석모델 가속도응답 시스템은 차량질량변화에 대해 불변함을 확인할 수 있었다. ② NARX신경망을 통한 궤도틀림과 수치모델의 최적시스템을 선별하기위해 신경망 Layer의 뉴런의 수 를 변화시켜가며 최소 RMSE를 갖는 시스템을 식별하였다.
③ 추정된 궤도틀림과 기준 궤도틀림과의 상관성을 판별하기위해 PSD(Power Spectrum Density)를 통 해 관계를 규명하였다.
본 연구에서는 질량이 증가된 모델을 통해 NARX신경망을 이용한 궤도틀림 추정결과의 신뢰성을 확 인하였다. 추후 실제 현장적용 여부를 결정하기 위해서는 차량마다 각기 다른 K(Stiffness), C(Damping ratio)의 변화에 따른 알고리즘을 적용할 필요가 있으며 시뮬레이션 검토를 마친 후에는 실제 KTX열차 에 적용하여 알고리즘을 검증하는 연구가 필요하다.
감사의 글
본 논문에서 사용한 궤도검측데이터와 차량진동데이터는 국토해양부의 미래철도기술개발사업(code #07 차세대고속철도 A01)에서 제공하였습니다.
참고문헌
1. H E McAnaw, “The system that measures the system.”, Independent Nondestructive Testing and Evalution, Vol.36, 169-179, 2003
2. J Maria, P Menezes J, Guihereme A Barreto, “Long-term time series prediction with the NARX network: An empirical evaluation”, Neurocomputing, Vol. 71, 3335-3343, 2008
3. M A Kramer, “Autoassociative Neural Networks”, Comput.Chem.Engng., 1991
4. P F Weston, C S Ling, C Roberts, C J Goodman, P Li, and R M Goodall, "Monitoring vertical track irregularity from in-service railway vehicles," Proc. IMechE Part F:J. Rail and Rapid Transit, 221(F1), pp.75-100, 2007 5. 김성용, “차량의 동적 특성 분석을 통한 궤도틀림 식별”, 2010년도 춘계학술대회, 2010 6. 김재천, “주파수영역 전달함수를 이용한 궤도틀림 식별”, 한국철도학회 논문집, 제 12권 제4호, pp.506-510, 2009 7. 서사범, “궤도장비와 선로관리”, 얼과 알, 2002 8. 신수봉, “웨이브렛 전달함수를 이용한 궤도틀림 식별”, 2010년 6월 한국철도학회논문집, 2010 9. 이준석, “칼만 필터를 이용한 축상 진동가속도로부터 변위추정에 관한 연구”, 2009년도 추계학술대 회, 2009