https://doi.org/10.7780/kjrs.2021.37.2.3 ISSN 2287-9307 (Online)
Article
기상 조건과 작물 생육상태에 따른
무인기 기반 지표면온도의 관측 정확도 평가
류재현 1)†)
Evaluation of Measurement Accuracy for Unmanned Aerial Vehicle-based
Land Surface Temperature Depending on Climate and Crop Conditions
Jae-Hyun Ryu 1)†
Abstract: Land Surface Temperature (LST) is one of the useful parameters to diagnose the growth and development of crop and to detect crop stress. Unmanned Aerial Vehicle (UAV)-based LST (LSTUAV)
can be estimated in the regional spatial scale due to miniaturization of thermal infrared camera and development of UAV. Given that meteorological variable, type of instrument, and surface condition can affect the LSTUAV, the evaluation for accuracy of LSTUAVis required. The purpose of this study is
to evaluate the accuracy of LSTUAV using LST measured at ground (LSTGround) under various
meteorological conditions and growth phases of garlic crop. To evaluate the accuracy of LSTUAV, Relative
humidity (RH), absolute humidity (AH), gust, and vegetation index were considered. Root mean square error (RMSE) after minimizing the bias between LSTUAVand LSTGroundwas 2.565°C under above 60%
of RH, and it was higher than that of 1.82°C under the below 60% of RH. Therefore, LSTUAV
measurement should be conducted under the below 60% of RH. The error depending on the gust and surface conditions was not statistically significant (p-value < 0.05). LSTUAVhad reliable accuracy under
the wind speed conditions that allow flight and reflected the crop condition. These results help to comprehend the accuracy of LSTUAVand to utilize it in the agriculture field.
Key Words: Unmanned Aerial Vehicle, Land Surface Temperature, Thermal Infrared Camera, Infrared Thermometer
요약 : 작물의 생육 상태와 스트레스를 탐지하기 위한 유용한 변수 중 하나인 지표면온도(LST)는 열화상 카메 라의 소형화와 무인기(UAV)의 발달로 인해 식생 군락 및 지역적 규모에서 취득할 수 있게 되었다. 무인기에 장 착된 열화상 카메라로 관측한LST(LSTUAV)는 습도, 풍속과 같은 기상인자, 관측기기, 그리고 지표 상태에 따라
영향을 받으나 다양한 기상 조건과 작물의 생육 단계에서 측정된LSTUAV의 정확도 평가는 부족한 실정이다. 본
Received March 16, 2021; Revised April 2, 2021; Accepted April 4, 2021; Published online April 8, 2021
1)전남대학교 응용식물학과 박사후연구원 (Postdoctoral Researcher, Department of Applied Plant Science, Chonnam National University)
†Corresponding Author: Jae-Hyun Ryu ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. 서론
지표면온도(Land Surface Temperatuer, LST)는 식생 과 대기 사이의 에너지 교환에 중요한 변수이다(Solangi
et al., 2019). LST를 관측하기 위해 열적외선 파장(8-14
μm, Thermal infrared wavelength)이 사용되며(Cho et al., 2013; Olioso 1995), 비접촉식 적외선 센서, 열화상 카메 라 등을 통해 관측 대상에서 방출되는 복사에너지를 관 측하여LST를 추정한다. 식생 원격탐사 분야에서 LST 는 식생과 토양의 정보를 모두 포함하고 있으며, 식생 피복률, 식생의 상태, 식생의 증산작용, 토양의 수분 상 태 등은LST와 상호작용하는 요인이다(Ryu et al., 2015). 토양의 영향이 최소화된 식생 상부에서 측정된 온도를 캐노피 온도(Canopy Temperature)로 정의하며, 단일 잎 규모에서 측정된 온도는 엽온(Leaf Temperature)이라 정 의한다. 일반적으로 맑은 날 식생 온도는 태양복사에너지로 인해 오전에 상승하고 태양 천정각이 최소가 되는 시점 이 지나면 감소하는 ∩형의 일 변동을 한다. 작물이 태 양에너지를 흡수하면 엽온이 상승을 하며, 증산을 통해 엽온을 낮춘다(DeJonge et al., 2015). 증산은 엽온을 변화 시키는 주요 작용이며, 기공의 개폐 정도와 토양수분 등 에 의해 조절된다. 하지만 식물이 생물학적/비생물학 적 스트레스를 받으면 광합성 효율이 낮아지고 기공을 닫으면서 엽온이 증가하게 된다(Jeong et al., 2018; Na et al., 2020). 예를 들어 가뭄으로 인해 토양수분이 부족하 면 토양으로부터 흡수하는 수분이 감소하여 기공을 닫 아 증산을 억제하기 때문에 엽온이 상승한다(Jones et al., 2009). 이와 같은 매커니즘을 표현하기 위해 작물 수분 스트레스 지수(Crop Water Stress Index, CWSI)가 개발 되었으며(Idso et al., 1981; Jackson et al., 1981), LST와 기 온의 차 그리고 수증기압포차(Vapor Pressure Deficit)를 이용하여 작물의 수분 스트레스를 추정한다.
열화상 카메라의 소형화와 드론과 같은 소형 무인기 (Unmanned Aerial Vehicle, UAV)의 발달은 LST 정보를 군락 및 지역적 규모로 취득할 수 있게 하였다. 생육 초 기 작물을 대상으로 무인기에서 촬영된 열화상 영상은 캐노피 온도와 토양의 온도 정보를 모두 포함하며, 식생 피복률이 높아지면서 캐노피 온도를 나타낸다. Bian et al. (2019)과 Na et al. (2020)는 무인기에 탑재된 열화상 카 메라를 통해 촬영한LST(LSTUAV)를 기반으로 CWSI를 계산한 뒤 수분 스트레스로 인한 목화와 배추의 생육이 상을 탐지하였다. 이처럼 LSTUAV는 작물의 생육 상태를 모니터링하고 스트레스를 탐지하는 데 활용될 수 있다 (Camino et al., 2018; Jackson et al., 1981; Sandholt et al., 2002). 하지만 정밀농업 시스템에서LSTUAV를 연속적으로 활 용하기 위해서는 산출물에 대한 품질 평가가 요구된다. Kelly et al. (2019)에 따르면 실험실 환경에서 열화상 카메 라의 정확도는 약0.5°C이나 야외에서는 외부 환경 요인 으로 인해5°C로 감소하였다. 또한, Zhang et al. (2019)은 풍속과 같은 기상인자와 관측 기기에 따라LST를 입력 변수로 하는CWSI의 민감도에 영향을 줄 수 있다고 보 고하였다. 선행연구들의 결과들은 LSTUAV이 관측 기기 의 민감도, 관측 시 기상 상황 등 외부 요인에 의해 영향 을 받을 수 있다는 것을 의미한다. Song and Park (2020) 은 초지를 대상으로LSTUAV의 정확도를 지상에서 관측 한LST 자료를 이용하여 검증하였으나 작물의 경우 생 연구의 목적은 지상에 고정된 열적외선 센서에서 관측된LST(LSTGround)를 이용하여 다양한 기상 조건과 작물 의 생육 상황에서LSTUAV의 정확도를 평가하는 것이다. 마늘 작물을 대상으로 LSTUAV관측을 수행하였으며, 상 대습도, 절대습도, 돌풍, 그리고 식생지수에 따른 LSTUAV정확도를 평가하였다. 센서 간의 편향을 최소화한 경 우 상대습도가60%를 초과하는 조건에서 관측된 LSTUAV의 평균제곱근오차는2.565°C로 상대습도 60% 이하에 서 관측된LSTUAV의 평균제곱근오차(1.82°C) 보다 정확도가 낮았으며, 절대습도에 대한 결과도 상대습도와 유 사했다. 이는 대기 중의 습도가 LSTUAV의 정확도에 영향을 미친다는 것을 의미한다. 따라서 LSTUAV를 관측은 상대습도가60% 이하의 조건에서 수행되는 것을 권고한다. 반면, 돌풍이나 식생 피복률의 영향은 통계적으로 유의하지 않았다. 이것은 무인기 비행이 안정적으로 가능한 조건에서 LSTUAV는 식생의 상태를 반영한 신뢰성 있는 값을 도출한다는 것을 의미한다. 본 연구의 결과는 농업 분야에서 LSTUAV의 정확도를 이해하고 활용하는 데 도움이 될 것이다.
육 단계별로 상이한 식생 피복률을 가지며, 작물의 생 육 상태를 고려한 평가가 요구된다. 본 연구의 목적은 작물을 대상으로 군락 규모로 측정 된LSTUAV품질을 이해하고 활용도를 높이기 위하여 지 상에서 관측된LST를 이용하여 LSTUAV정확도를 평가하 는 것이다. 이를 위해 지상 고정형 적외선 온도 센서를 작물을 대상으로 설치하였으며, 상대습도, 절대습도, 돌 풍과 같은 기상인자와 식생 피복률(Fractional Vegetation Cover)에 따른 LSTUAV의 정확도를 평가하였다.
2. 연구자료 및 방법
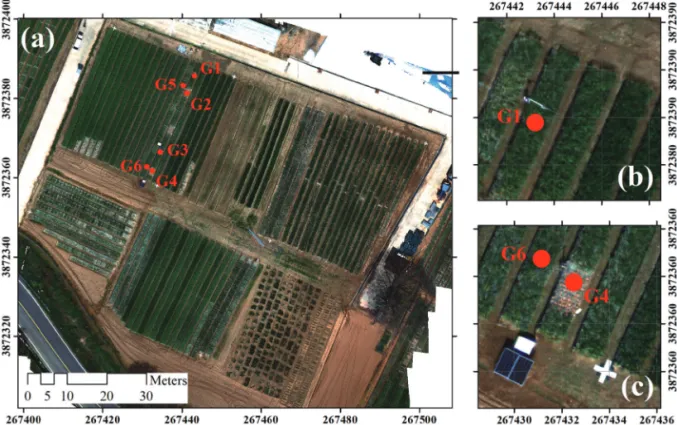
1) 연구 영역 연구 영역은 농촌진흥청 국립식량과학원 바이오에너 지작물센터(전라남도 무안군 청계면 무안로 199)에서 관 리하는 마늘 포장이다. 관측 지점(34.9672°N, 126.4530°E) 은 이랑과 고랑이 존재하며, 이랑에 비닐 멀칭한 뒤 약 13 cm 간격으로 마늘(품종: 남도)을 재식하였다(Fig. 1). 재 배 작물(마늘)은 매년 10월에 파종하며, 기온이 10°C 이 하가 되면 생육이 저하된다. 기온이 상승하는 2월 중순 부터 다시 생육이 시작되며, 마늘의 식생활력도는 4월 중순에서5월 초순에 가장 높다(Ryu et al., 2020). 이후 잎 이 노화되며, 5월 하순~6월 초순에 마늘을 수확한다. 본 연구에서는2019년과 2020년 지상 고정형 센서와 무 인기에 탑재된 열화상 카메라를 이용하여LST 측정하 였으며, 2020년 마늘의 경우 제초제 과다 살포로 인해 일부 지점에서 피해(G2, G4 in Fig. 1(a))가 발생하였다. 제초제 피해를 받은 지점의 경우 다른 지점에 비해 식 생 피복률이 현저히 낮았다(Fig. 1(c)). 본 연구에서는 식 생 피복률과 높은 상관관계가 있는NDVI (Normalized Difference Vegetation Index)를 이용하여 작물의 생육 시 기와 제초제 피해에 따른 토지피복 상태를 고려하였다 (Bates et al., 2021). 2) 지상 고정형 센서 지상에서LST를 측정하기 위하여 비접촉식 적외선 표면온도 센서(SI-411, Apogee, Logan, UT, USA)들이 모 노포드 구조물에 설치되었다(Fig. 1(a)). 설치된 센서는 8-14 µm 파장 범위(Spectral range)에서 측정된 에너지를Fig. 1. Positions of infrared thermometer (IRT) sensors in 2020: (a) Study area in South Korea, (b) region of interest (ROI) of IRT, and (c) ROI of IRT and ground control point (GCP) targets.
이용하여LST(LSTGround, °C)를 추정하며, ±0.2°C의 관 측 불확실성을 가진다. 적외선 온도 센서의 시야각(Field Of View, FOV)은 44°이며, 센서가 지상으로부터 약 1.3 m 높이에 설치된 것을 고려할 때, 관측 반경은 약 52.5 cm이다. 작물이 성장하여 센서와 타겟 간의 거리가 가 까워지면 관측 반경은 좁아진다. LSTGround는2번의 마늘 재배기간 동안 관측되었으며, 2019년에는 적외선 온도 센서2개를 이용하여 2곳, 2020년에는 적외선 온도센서 4 개를 이용하여6곳에서 관측이 수행되었다. 제초제 피해 가 심각한G2, G4 지점에서 2020년 3월까지 관측을 수행 하였으며, 2020년 4월부터 5월까지는 센서의 위치를 G5, G6로 옮겨 관측을 수행하였다. 무인기 관측 시 기상 상 황을 파악하기 위한 온습도계(VP-4, Meter Environment, Pullman, WA, USA)와 풍향풍속계(ATMOS 22 ultrasonic anemometer, Meter Environment, Pullman, WA, USA)도 관측 필지에 설치하였다. LSTGround와 기온(°C), 상대습 도(%), 풍향(°), 풍속(m/s), 돌풍(m/s) 등과 같은 기상인 자는 데이터 로거(EM50, METER Group, Inc., Pullman, USA)에 2분 간격으로 저장되었으며, 무인기 관측 시간 동안 관측된 값들을 평균하여 사용하였다. 예를 들어 무 인기가12시 22분~12시 32분까지 10분 동안 비행하였 다면, 12시 22분, 12시 24분, 12시 26분, 12시 28분, 12시 30분에 집록된 자료를 평균하였다. 또한, 기온과 상대습 도 정보를 이용하여 절대습도(g/m3)을 계산하였다. 적 외선 표면온도 센서가 관측한 지점에서NDVI의 최댓 값은2019년 0.834, 2020년 0.826이며, 무인기 비행시간 동안 최대 돌풍 값은 각각5.38, 5.3 m/s 이다. 관측 기간 동안 절대습도는4~13.6 g/m3의 분포를 보였다. 3) 무인기 영상 열화상 카메라와 다중분광카메라를 탑재한 무인기 (S1000, SZDJITechnologyCo., Ltd., ShamChun, Guangdong Province, China)를 이용하여 작물의 LST와 분광반사도 값을 측정하였다. 열화상 카메라(Duo Pro R 640, FLIR Systems, Inc., Wilsonville, Oregon, USA)는 640×512 화소 를 가지며, FOV는 32°×26° 이다. 열화상 카메라의 측정 정확도는-25°C~+135°C 범위에서 ±5°C 또는 측정값 의5%이다(https://www.flir.com/products/duo-pro-r). 방 출률은0.98로 설정한 뒤 열화상 카메라를 통해 LSTUAV 를 측정하였다. 무인기에 탑재된 다중분광카메라는RedEdge-MX Dual(Micasense, Inc., Seattle, USA)로써 2개의 다중분광 카메라가 결합되어 있으며, 총 10개의 밴드를 탑재하고 있다 (https://micasense.com/dual-camera-system). Rededge-MX 다중분광카메라는 475 nm, 560 nm, 668 nm, 717 nm, 그리고842 nm 밴드를 탑재하고 있으며, Rededge-MX Blue 다중분광카메라는 444 nm, 531 nm, 650 nm, 705 nm, 그리고740 nm 밴드를 탑재하고 있다. 무인기를 이용한 광학 관측은 생육정지기 이후3월부 터5월까지 2019년 19회, 2020년 13회 수행되었으며, 다양 한 생육 시기에 대한LSTUAV를 평가하였다(Table 1). 연구 영역의 면적을 고려하였을 때 비행시간은 약10분이며, 촬영된 영상들은Pix4D mapper 소프트웨어(®Ecublens, Switzerland)를 이용하여 처리하였다. 7개의 지상기준점 (GCP, Ground Control Points)을 기준(Fig. 1)으로 기하보 정을 수행하였으며, 지상표본거리(GSD, Average Ground Sampling Distance)의 평균제곱근오차(RMSE, Root Mean
Table 1. The measurement schedules of the thermal camera onboard unmanned aerial vehicle
Date Start time for the flight (hh:mm) Flight level
March 12, 2019 10:47 30 m March 28, 2019 12:41 30 m April 16, 2019 08:05, 10:23, 14:14, 15:08, 16:12 30 m May 3, 2019 08:01, 09:52, 11:52, 13:09, 14:12, 15:54 30 m May 17, 2019 09:27, 10:36, 12:13, 13:24, 14:20, 16:20 30 m March 20, 2020 12:33 30 m April 2, 2020 12:18, 12:33 30 m April 29, 2020 12:22, 13:35, 13:54 30 m May 4, 2020 08:36, 09:57, 12:25 30 m, 50 m May 20, 2020 10:47, 12:05, 12:31, 14:03 30 m, 50 m
Square Error)는 2개 화소 이내로 높은 위치 정확도를 보 였다. 자료처리된 LSTUAV의GSD는 30 m (50 m) 고도에서 약2.32 cm(4.12 cm) 내외였으며, 분광반사도영상의GSD 는30 m 고도에서 약 1.84 cm 내외였다. 다중분광카메라에서 측정된 분광반사도의 방사보 정은 다음과 같은 순서로 수행되었다. 무인기 비행 전 다중분광카메라 제작사에서 제공한 반사도 보정 판넬 (CRP, Calibrated Reflectance Panel) 측정값을 기반으로 Pix4D mapper 소프트웨어에서 분광반사도 값을 도출 하였다. 이후 지상에 설치한 5%, 22%, 44%, 55% 반사도 보정천들을 이용하여 보정 하였다. 방사보정 후 식생의 활력도를 추정하기 위해 분광반사도를 이용하여NDVI 를 산출하였다(식 1). NDVI = (1) 여기서, R842는842 nm에서의 분광반사도를 의미하며, R668은668 nm에서의 분광반사도를 의미한다.
3. 결과 및 토의
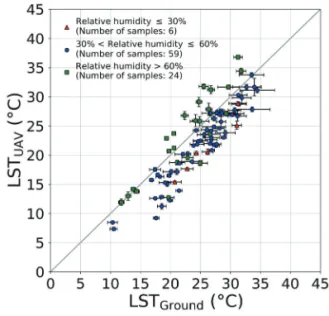
1) 무인기 기반의 LST 평가 LSTUAV와LSTGround는89개의 자료(2019년 38개, 2020년 51개)가 매칭되었다. 상관계수(Coefficient of correlation) 는0.877, RMSE는 3.799°C로 나타났다(Table 2). LSTUAV의편향(Bias) 값은-2.238°C로LSTUAV가 상대적으로LSTGround
보다 낮게 관측되고 있다는 것을 의미한다(Fig. 2). 두 관 측 센서 간의 편향(Bias)을 1차 회귀식을 이용하여 제거 한 뒤 계산된RMSE(Bias corrected RMSE)는 2.669°C이다. 본 연구의 결과는 무인기 또는 위성에서 관측된LST 의 평가 결과와 유사하거나 더 높은 정확도를 보였다. Song and Park (2020)은 다양한 토지피복(Land cover)에서 지상과 무인기에서 측정된LST를 2회에 걸쳐 지상 관 측 값과 비교하였다. LSTUAV의RMSE는 4.03°C, 5.446°C
였으며, 초지(Glass)에서는 4.748°C, 8.216°C로 다른 토 지피복에 비해 상대적으로 높은RMSE를 보였다. 또한, Kelly et al. (2019)의 연구에 의하면 LSTUAV의 정확도는
대략 ±5°C 였다. 본 연구의 결과가 선행연구들에 비해 식생지역에서 상대적으로 높은 정확도를 보이는 이유 는 무인기 및 지상LST 관측 시간이 일치하며, 관측 영 역(Footprint area)이 유사하기 때문으로 사료 된다. LST 의 경우 일사량의 영향을 받기 때문에(Nam et al., 2014) LSTUAV와 지상에서 관측된 자료 사이에 관측 시간은 최 소화되어야 한다. 위성LST 산출물은 지상 및 무인기 관측 자료에 비해 상대적으로 넓은 관측 범위(Footprint)를 가지기 때문에 균일한 토지피복을 가지는 지상 사이트에서 관측된 자 료를 이용하여 평가된다. Ryu et al. (2019)는 위성 LST 산 출물을LSTGround를 이용하여 평가하였다. Terra 위성에
탑재된MODerate-resolution Imaging Spectroradiometer (MODIS) 탑재체로부터 낮(Daytime)에 관측된 LST (LSTMODIS)는 지상에서 측정된 LSTGround와5.906°C의 RMSE를 가졌다. 이는 무인기가 위성 보다 낮은 고도에 서 관측을 하여 대기 중 에어로졸의 영향이 적었기 때 문에LSTUAV의 정확도가LSTMODIS보다 상대적으로 높 은 것으로 사료 된다. 위성 LST 산출물 정확도는 타 연 구 결과에서도 유사하였다. Duan et al. (2019)은 LSTMODIS
가1.72~5.58°C의 RMSE를 가지며, 0.10~4.69°C의 편 향(Absolute bias)이 나타났다고 보고하였으며, Visible Infrared Imaging Radiometer Suite(VIIRS) 위성의 LST는 지상에서 관측된LST와 0.43-3.93°C의 RMSE를 가졌다 (Guillevic et al., 2014).
R842– R668
R842+ R668
Fig. 2. Scatterplot between LSTUAVand LSTGround. Red
triangle indicate samples of relative humidity (RH) ≤ 30%. Blue circles indicate samples of 30% < RH ≤ 60% and green squares indicate sample of RH > 60%. The errorbar means the standard deviation of LSTGroundmeasured during UAV flight time.
2) 습도에 따른 LST 평가 선행연구들의 결과에 따르면 본 연구에서 측정된 LSTUAV는 합리적인 성능(Performance)을 보였으며, 습 도(상대습도, 절대습도)에 따른 LSTUAV의 정확도를 평 가하였다. Duo Pro R 640 열화상 카메라는 비행 전 상대 습도 정보를 입력한 뒤 관측을 수행한다. 30% 이하, 30 초과60% 미만, 60% 초과 중에서 현재 상대습도 조건을 선택한 뒤 관측을 수행하며, 본 연구에서는 제조사의 설 정과 같이3개의 범주(Category)로 구분하여 정확도를 평가하였다. 상대습도가 30% 이하의 조건에서 6개의 자 료가 획득 되었으며, 상관계수는 0.966, RMSE는 4.864°C 로 나타났다(Table 2). LSTUAV는 상대적으로LSTGround보
다 과소추정되는 경향이 나타났다(Bias=-4.709°C). 두 기 기 간의Bias를 제거하였을 경우 RMSE는 1.019°C로 높 은 정확도를 보였다. 상대습도가30% 초과 60% 미만인 조건에서도 LSTUAV 는LSTUAV와 음의Bias가 나타냈다. 총 59개의 자료가 획 득되었으며, 상관계수는 0.944, RMSE는 3.807°C로 나타 났다(Table 2). Bias를 제거하였을 경우 RMSE는 1.832°C 로 높은 정확도를 보였다. 반면 상대습도가 60%를 초과 한 조건에서 관측된LSTUAV는 양의Bias가 나타났다. 다 른 조건에 비하여RMSE는 3.46°C로 낮았으나 이는 상대 적으로 두 기기 간의Bias가 작은 영향 때문이었다. 그러 나 상관계수는0.884로 다른 조건에 비해 상대적으로 낮 았으며, Bias를 제거한 RMSE는 2.565°C로 다른 조건에 비해 상대적으로 높았다(Table 2). 해당 조건에서 LSTUAV 와LSTGround차이에 대한 표준편차는3.38°C로 30% 이 하(1.22°C), 30% 초과 60% 이하(2.06°C) 조건에 비해 큰 값을 나타냈다(Fig. 3(a)). 이와 같은 결과는 두 기기 간의 Bais를 제거하면 상대습도가 높을 때 LSTUAV의 정확도 가 떨어진다는 것을 의미한다. 상대습도가 60% 이하의 조건에서는 상관계수가0.942, Bias가 제거한 RMSE는 1.82°C로 나타났다. 본 연구에서는 상대습도뿐만 아니라 절대습도에 따 른LSTUAV의 정확도를 평가하였다. 5 g/m3이하, 5 g/m3 초과8 g/m3미만, 8 g/m3초과11 g/m3미만, 그리고 11 g/m3초과와 같이4개의 범주를 설정하고 절대습도에
따른LSTUAV의 정확도를 최소유의차(least significant
difference) 검정(유의수준: 0.05)을 통해 평균값 사이의
통계적 차이를 평가하였다. 상대적으로 절대습도가 높
은 조건(>11 g/m3)에서 관측된 LSTUAV의 정확도는 상대
Table 2. Statistics results between LSTGroundand LSTUAV
Samples Number of samples Correlation RMSE after bias correction (°C) RMSE (°C) Bias of LSTUAV(°C)
All 89 0.877 2.669 3.799 -2.238 RH1)≤ 60% 65 0.942 1.820 3.917 -3.338 RH > 60% 24 0.884 2.565 3.460 0.740 30% < RH ≤ 60% 59 0.944 1.832 3.807 -3.199 RH ≤ 30% 6 0.966 1.019 4.864 -4.709 1) RH: Relative Humidity
Fig. 3. Box plots on the difference in LSTUAVand LSTGround
depending on (a) relative humidity and (b) absolute humidity. The data were analyzed using the least significant difference at a 5% significance level. Red circles indicate mean values.
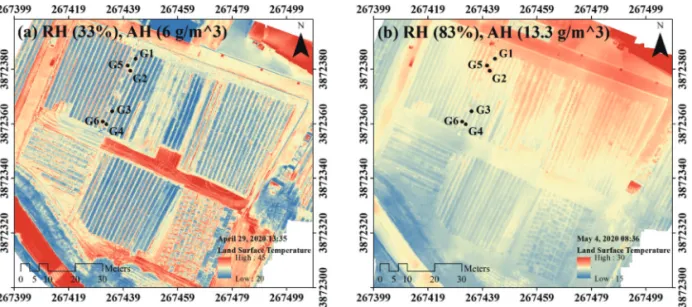
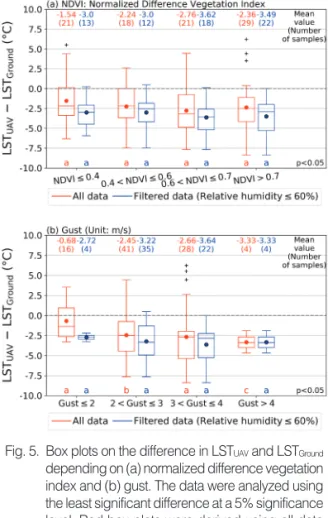
적으로 절대습도가 낮은 조건(≤11 g/m3)에서 관측된 LSTUAV와 통계적으로 유의한 차이(p-value < 0.05)를 보 였다. 이는 상대습도가 높았을 때 결과와 유사하며, 대 기 중의 습도(상대습도, 절대습도)가 LSTUAV의 정확도 에 영향을 미친다는 것을 의미한다. Fig. 4(a)는 2020년4월29일 13시35분에 상대습도가 33%(절대습도: 6 g/m3)인 조건에서 촬영된 LSTUAV영상 이다. 대기 중의 습도가 낮은 조건에서 연구 지역에서 의 이랑과 고랑이LSTUAV영상만으로도 뚜렷하게 구분 되었다. 식생이 존재하는 이랑에서의 LST는 식생이 존 재하지 않는 고랑에서의LST 보다 상대적으로 낮았다. 이처럼 작물이 재배되는 지역에서LST가 낮은 이유는 잎이 증산을 통해 온도를 낮추기 때문이다(An et al., 2021; Jeong et al., 2019). 반면, 2020년5월4일 8시36분에 상대습도가83%(절대습도: 13.3 g/m3)인 조건에서 촬영 된LSTUAV영상에서는 이랑과 고랑의 경계가 뚜렷하지 않을 뿐만 아니라 동북-남서 방향으로 LSTUAV분포가 달리 나타났다(Fig. 4(b)). 태양복사를 동일하게 받는 좁 은 영역의 농지에서 이와 같은 분포가 나타난 이유는 높 은 습도 영향 때문으로 사료 된다. 대기 중 수증기는 공 간적으로 변이가 크며, 수증기 입자는 비선택적 산란을 야기한다(Lee, 2019). 따라서 습도가 높은 상태에서 관측 된 무인기 기반의LST 영상은 사용 시 유의하여야 한다. 3) NDVI 및 돌풍에 따른 LST 평가 NDVI및돌풍에따른LSTUAV의 정확도도 평가하였다. 상대습도의 영향을 최소화하여 위해1) 관측된 모든 자 료(All data), 2) 상대습도가 60% 이하의 조건일 때 자료 (Filtered data)로 구분한 뒤 각각 평가하였다. Fig. 5(a)는 NDVI에 따른 LSTUAV와LSTGround의 차이에 대한 상자
그림(Boxplot)으로 식생 피복률에 대한 영향을 살펴보 았다. 토양이 많이 노출되어 있는 경우(NDVI ≤ 0.4), 식 생의 성장 시기(0.4 < NDVI ≤ 0.7), 식생으로 캐노피 (Canopy)가 덮여져 있는 경우(NDVI > 0.7) 모두 음의 편 향(Bias)이 나타났으며, 상대습도가 60% 초과한 조건에 서 관측된 자료가 포함될수록 편차가 더 크게 나타났다. 각각의NDVI 범주(Category)에 따른 LSTUAV의 정확도
는 최소유의차 검정을 통해 평가되었으며, LSTUAV의 정 확도는 식생 피복률에 따라 유의한 차이(p-value < 0.05) 가 나타나지 않았다. 이것은 LSTUAV가 식생 피복률과 관계없이 일정한 정확도를 보인다는 것을 의미한다. Fig. 5(b)는 돌풍(단위: m/s)에 따른 LSTUAV의 정확도 결 과이다. 강한 돌풍은 무인기 비행에 영향을 주어 LSTUAV 품질에 영향을 줄 수 있다. 상대습도가 60% 이하의 조건 에서 관측된 자료들에 대한 결과를 살펴보면, 무인기 비 행이 가능한 경우 돌풍에 따라LSTUAV와LSTGround사이에 유의한 차이(p-value < 0.05)가 나타나지 않았다. 비록 모든 자료의 분석 결과에서는 돌풍에 따라LSTUAV와
Fig. 4. Images of land surface temperature captured by infrared camera on-board unmanned aerial vehicle: (a) LST image (relative humidity: 33%, absolute humidity: 6 g/m3) on April 29, 2020, 13:35, (b) LST image (relative humidity: 83%,
LSTGround사이에 유의한 차이(p-value < 0.05)가 나타났 으나 이것은 상대습도의 영향 때문이었다. Kelly et al. (2019)에 따르면 바람이 열화상 카메라의 LSTUAV산출 정확도에 영향을 줄 수 있으나 무인기 비행이 가능한 낮 은 풍속(~4 m/s) 조건에서는 LSTUAV에 유의미한 영향 을 주지 않는다는 것을 확인하였다.
4. 요약 및 결론
소형 무인기에 열화상 카메라를 탑재하여 작물의 생 육을 모니터링하는 연구가 진행되어 왔다. 비록 열화상 카메라는 실험실에서0.5°C 이내의 낮은 관측 오차를 보이지만 야외에서 열화상 카메라를 이용하여 작물의 이상 반응을 탐지에 활용하기 위해서는 기기의 성능이 평가되어야 한다. 본 연구에서는 2년 동안 기상(상대습 도, 절대습도, 돌풍) 상황과 토지 피복률(NDVI) 조건에 서LSTUAV를 평가하였다. LSTUAV는LSTGround와0.877의 상관관계를 보이며, RMSE는 3.799°C였다. 관측 센서 간의 편향을 제거하였 을 경우RMSE는 2.669°C로 나타났다. 상대습도가 60% 를 초과하는 조건에서 상대습도가60% 이하 조건보다LSTUAV의Bias corrected된 RMSE는 0.745°C 높았다. 이
는 상대적으로 낮은 비행 고도(30 m 또는 50 m)에서 무 인기를 이용한LST 관측이 수행되었지만 대기 중의 수 증기가LST 정확도에 영향을 주었다는 것을 의미한다. 따라서 무인기를 이용한LST 관측은 상대습도가 60% 이하의 기상 조건에서 수행하는 것이 좋겠다. 반면, 토 지피복이 균일한 조건에서 식생 피복률에 따른LSTUAV 의 정확도는 통계적으로 유의한 차이가 없었으며, LSTUAV는 작물의 상태와 생육기간에 따른 지표 특성을 반영하고 있다는 것을 의미한다. 돌풍의 영향도 상대습 도가60% 이하의 조건에서 통계적으로 유의하지 않았 으며, 이는 무인기가 안정적으로 비행할 수 있는 돌풍 범위(0~4 m/s)에서는 바람이 LSTUAV정확도에 유의한 영향을 주지 않는다고 판단된다. 본 연구에서는 농지를 대상으로LSTUAV의 정확도를 평가하였기 때문에 방출률을0.98로 일정하게 설정하 였다. 하지만 관측 물체에 따라서 방출률은 서로 상이 하기 때문에 농지 이외에서LSTUAV의 정확도를 평가하 기 위해서는 방출률을 조정한 뒤 평가하여야 한다. 본 연구의 결과는 농업 분야에서 무인기를 이용한LSTUAV 의 정확도를 이해하는 데 도움이 될 것이며, 습도가 LSTUAV품질에 영향을 준다는 것을 고려할 때 습도가 더 높은 조건(여름철)에서 관측된 LSTUAV자료에 대한 정 확도 평가가 요구된다.
사사
이 논문은 농촌진흥청 공동연구사업(과제번호: PJ01 3821032021)의 지원을 받았으며, 이에 감사드립니다.Fig. 5. Box plots on the difference in LSTUAVand LSTGround
depending on (a) normalized difference vegetation index and (b) gust. The data were analyzed using the least significant difference at a 5% significance level. Red box plots were derived using all data and blue box plots were derived using the filtered data (relative humidity ≤ 60%).
Reference
An, J.H., S.H. Jeon, E.Y. Choi, H.M. Kang, J.K. Na, and K.Y. Choi, 2021. Effect of Irrigation Starting Point of Soil on Chlorophyll Fluorescence, Stem Sap Flux Relative Rate and Leaf Temperature of Cucumber in Greenhouse, Journal of
Bio-Environment Control, 30(1): 46-55 (in Korean
with English abstract).
Bates, J.S., C. Montzka, M. Schmidt, and F. Jonard, 2021. Estimating Canopy Density Parameters Time-Series for Winter Wheat Using UAS Mounted LiDAR, Remote Sensing, 13(4): 710.
Bian, J., Z. Zhang, J. Chen, H. Chen, C. Cui, X. Li, S. Chen, and Q. Fu, 2019. Simplified evaluation of cotton water stress using high resolution unmanned aerial vehicle thermal imagery, Remote Sensing, 11(3): 267.
Camino, C., P. Zarco-Tejada, and V. Gonzalez-Dugo, 2018. Effects of Heterogeneity within Tree Crowns on Airborne-Quantified SIF and the CWSI as Indicators of Water Stress in the Context of Precision Agriculture, Remote Sensing, 10(4): 604.
Cho, A.-R. and M.-S. Suh, 2013. Evaluation of Land Surface Temperature Operationally Retrieved from Korean Geostationary Satellite (COMS) Data, Remote Sensing, 5(8): 3951-3970. DeJonge, K.C., S. Taghvaeian, T.J. Trout, and L.H.
Comas, 2015. Comparison of canopy temperature-based water stress indices for maize, Agricultural
Water Management, 156: 51-62.
Duan, S.-B., Z.-L. Li, H. Li, F.-M. Gottsche, H. Wu, W. Zhao, P. Leng, X. Zahng, and C. Coll, 2019. Validation of Collection 6 MODIS land surface temperature product using in situ measurements,
Remote Sensing of Environment, 225: 16-29.
Guillevic, P.C., J.C. Biard, G.C. Hulley, J.L. Privette, S.J. Hook, A. Olioso, F.M. Gottsche, R. Radocinski, M.O. Roman, Y. Yu, and I. Csiszar, 2014. Validation
of Land Surface Temperature products derived from the Visible Infrared Imaging Radiometer Suite (VIIRS) using ground-based and heritage satellite measurements, Remote Sensing of Environment, 154: 19-37.
Idso, S.B., R.D. Jackson, P.J.J. Pinter, R.J. Reginato, and J.L. Hatfield, 1981. Normalizing the stress degree-day parameter for environmental variability,
Agricultural Meteorology, 24: 45-55.
Jackson, R.D., S.B. Idso, R.J. Reginato, and P.J. Pinter, 1981. Canopy temperature as a crop water stress indicator, Water Resources Research, 17(4): 1133-1138.
Jeong, H., R.D. Jeong, J.H. Ryu, D. Oh, S. Choi, and J. Cho, 2019. Preliminary growth chamber experiments using thermal infrared image to detect crop disease, Korean Journal of Agricultural and
Forest Meteorology, 21(2): 111-116 (in Korean
with English abstract).
Jones, H.G., R. Serraj, B.R. Loveys, L. Xiong, A. Wheaton, and A.H. Price, 2009. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field, Functional Plant Biology, 36(11): 978.
Kelly, J., N. Kljun, P.O. Olsson, L. Mihai, B. Liljeblad, P. Weslien, L. Klemedtsson, and L. Eklundh, 2019. Challenges and best practices for deriving temperature data from an uncalibrated UAV thermal infrared camera, Remote Sensing, 11(5): 567.
Lee, K.S., 2019. Atmospheric correction issues of optical imagery in land remote sensing, Korean
Journal of Remote Sensing, 35(6-3): 1299-1312
(in Korean with English abstract).
Na, S.I., H.Y. Ahn, C.W. Park, S.Y. Hong, K.H. So, and K.D. Lee, 2020. Crop Water Stress Index (CWSI) Mapping for Evaluation of Abnormal Growth of Spring Chinese Cabbage Using Drone-based Thermal Infrared Image, Korean
Journal of Remote Sensing, 36(5-1): 667-677 (in
Korean with English abstract).
Nam, S.W., Y.S. Kim, and D.U. Seo, 2014. Change in the plant temperature of tomato by fogging and airflow in plastic greenhouse, Protected Horticulture
and Plant Factory, 23(1): 11-18 (in Korean with
English abstract).
Olioso, A., 1995. Estimating the difference between brightness and surface temperatures for a vegetal canopy, Agriculture Forest and Meteorology, 72(3-4): 237-242.
Ryu, J.H., H. Jeong, S. Choi, Y.W. Lee, and J. Cho, 2019. Comparison of Land Surface Temperatures from Near-surface Measurement and Satellite-based Product, Korean Journal of Remote Sensing, 35(4): 609-616 (in Korean with English abstract). Ryu, J.H., K.S. Han, J. Cho, C.S. Lee, H.J. Yoon, J.M.
Yeom, and M.L. Ou, 2015. Estimating midday near-surface air temperature by weighted consideration of surface and atmospheric moisture conditions using COMS and SPOT satellite data, International
Journal of Remote Sensing, 36(13): 3503-3518.
Ryu, J.H., S.I. Na, and J. Cho, 2020. Inter-Comparison of Normalized Difference Vegetation Index Measured from Different Footprint Sizes in Cropland, Remote Sensing, 12(18): 2980. Sandholt, I., K. Rasmussen, and J.A. Andersen, 2002.
simple interpretation of the surface temperature/ vegetation index space for assessment of surface moisture status, Remote Sensing of Environment, 79(2-3): 213-224.
Song, B. and K. Park, 2020. Verification of Accuracy of unmanned aerial vehicle (UAV) land surface temperature images using in-situ data, Remote
Sensing, 12(2): 288.
Solangi, G.S., A.A. Siyal, and P. Siyal, 2019. Spatiotemporal dynamics of land surface temperature and its impact on the vegetation, Civil Engineering
Journal, 5(8): 1753-1763.
Zhang, L., H. Zhang, Y. Niu, and W. Han, 2019. Mapping maize water stress based on UAV multispectral remote sensing, Remote Sensing, 11(6): 605.