년
월
2019
12
19ZH1100-19-xxxx
사물 사람 공간의 유기적연결을 위한
-
-초연결 공간의 분산 지능 핵심원천 기술
Distributed Intelligence Core Technologyof
Hyper-Connected Space
본 문서에서 음영처리된 부분은 ( ) 정보공개법 제 조의 비공개대상정보와 저9 작권법 및 그 밖의 다른 법령에서 보호하고 있는 제 자의 권리가 포함된 저작물로 공3 개대상에서 제외되었습니다.
제 출 문
본 연구보고서는 주요사업인 “
사물 사람 공간의 유기적 연결을 위한 초연결 공간의 분산 지능 - -핵심원천 기술 과제의 결과로서 본 과제에 참여한 아래의 연구진이 작성한 것입니다” , . 년 월 2019 12연구책임자 책임연구원 박준희
:
(ETRI,2019.01~12)
연구참여자 책임연구원 손영성
:
(ETRI, 2019.01~12)
선임연구원 장인국 (ETRI, 2019.01~12)
연구원 이동훈 (ETRI, 2019.01~12)
선임연구원 김성현 (ETRI, 2019.01~12)
선임연구원 김현석(6096) (ETRI, 2019.01~12)
책임연구원 조준면 (ETRI, 2019.01~12)
책임연구원 박찬원 (ETRI, 2019.01~12)
선임연구원 최진철 (ETRI, 2019.01~12)
선임연구원 송순용 (ETRI, 2019.01~12)
연구원 손종권 (ETRI, 2019.01~12)
책임연구원 박동환 (ETRI, 2019.01~12)
책임연구원 서영호 (ETRI, 2019.01~12)
책임연구원 임선환 (ETRI, 2019.01~12)
선임연구원 김현학 (ETRI, 2019.01~12)
연구원 우성필 (ETRI, 2019.01~12)
책임연구원 홍강운 (ETRI, 2019.07~12)
책임연구원 한미경 (ETRI, 2019.01~12)
책임연구원 장종현 (ETRI, 2019.02~12)
책임연구원 장인성 (ETRI, 2019.01~12)
책임연구원 최원혁 (ETRI, 2019.01~12)
책임연구원 박노삼 (ETRI, 2019.01~12)
책임연구원 윤재관 (ETRI, 2019.01~12)
책임연구원 윤현진 (ETRI, 2019.01~12)
연구원 장수영 (ETRI, 2019.01~12)
책임연구원 이강복 (ETRI, 2019.01~12)
책임연구원 명승일 (ETRI, 2019.01~04)
연구원 전지훈 (ETRI, 2019.01~12)
책임연구원 신동범 (ETRI, 2019.01~04)
책임연구원 김현석(4597) (ETRI, 2019.01~04)
책임연구원 손교훈 (ETRI, 2019.01~04)
책임연구원 조광수 (ETRI, 2019.01~04)
책임연구원 이상연 (ETRI, 2019.01~12)
선임연구원 양회성 (ETRI, 2019.01~03)
선임연구원 한규원 (ETRI, 2019.01~03)
책임연구원 홍상기 (ETRI, 2019.01~12)
책임연구원 김명은 (ETRI, 2019.01~12)
책임연구원 방효찬 (ETRI, 2019.01~12)
책임연구원 손지연 (ETRI, 2019.01~12)
선임연구원 이은서 (ETRI, 2019.01~12)
책임연구원 강현철 (ETRI, 2019.01~12)
선임연구원 배희철 (ETRI, 2019.01~12)
선임연구원 한효녕 (ETRI, 2019.01~12)
연구원 김민기 (ETRI, 2019.03~12)
책임연구원 김현 (ETRI, 2019.01~12)
책임연구원 김영일 (ETRI, 2019.01~12)
책임연구원 박만식 (ETRI, 2019.02~12)
책임연구원 한기평 (ETRI, 2019.08~10)
책임연구원 황승구 (ETRI, 2019.01~04)
책임연구원 이형섭 (ETRI, 2019.01~12)
책임연구원 한인탁 (ETRI, 2019.08~10)
책임연구원 김성환 (ETRI, 2019.01~12)
책임연구원 이성수 (ETRI, 2019.03~12)
책임연구원 장문수 (ETRI, 2019.01~02)
책임연구원 최길영 (ETRI, 2019.03~03)
연구원 양용준 (연수생, 2019.01~02)
연구원 남영우 (연수생, 2019.01~02)
연구원 배지훈 (연수생, 2019.01~02)
연구원 박재훈 (연수생, 2019.01~02)
연구원 양선민 (연수생, 2019.01~02)
연구원 권기영 연수생
(
, 2019.01~02)
연구원 남승윤 (UST, 2019.02~03)
연구원 로렌조 (UST, 2019.02~03)
책임연구원 백규하 (ETRI, 2019.11~12)
책임연구원 김성희 (ETRI, 2019.09~12)
주요사업 연차실적 보고서
연차실적 보고서
과제유형 1. 기초미래선도형 (o ) 2. 공공인프라형 ( ) 3. 산업화형 ( ) 대과제명 초연결 분산 지능 및 트러스트 데이터 핵심 원천기술 개발 세부과제명 사물 사람 공간의 유기적 연결을 위한 초연결 공간의 분산 지능 핵심원천 기술- -세부과제 책임자 소속 및 부서 지능형융합연구소 스마트ICT연구단 직위 직급 ( ) 단장 책임연구원 ( ) 성명 박준희 총연구기간 2018년 01월 01일 부터 2023년 12월 31일 까지 ( 72 개월) 당해연도 연구기간 2019년 01월 01일 부터 2019년 12월 31일 까지 (12 개월) ( 2 차년도) 참여인력(M/Y) 총 연 구 기 간 300 명 ( 160 M/Y) 당해연도 연구기간 65 명 ( 26 M/Y) 참여기관 기관명 연구책임자 기관명 연구책임자 참여연구기관 위탁연구기관 KAIST 이문용 한동대학교 최창범 연세대학교 정병도 서울대학교 이원종 성균관대학교 김광수Rudgers University Sungjin Ahn
키워드 개 (6~10 ) 정부출연금사업 연차평가 보고서를 제출합니다. 2019 년 12 월 06 일 과 제 책 임 자 박 준 희 인 : ( ) 직 할 부 서 장 박 종 현 인 : ( )
한국전자통신연구원장 귀하
요
약
문
제 목 . Ⅰ 대과제명 안전하고 스마트한 초연결 인프라 구현 o : 세부과제명 산업 및 사회문제 해결을 위한 사물 분산지능 핵심원천 기술 개발 o : 연구목적 및 중요성 . Ⅱ 본 연구는 사물인터넷 기반 초연결 환경에서 공간에 주어진 미션과 공간의 다양한 환경을 인지하고 상, 황에 맞게 효율적이고 자율적으로 문제를 해결하는 초연결 공간의 분산지능 핵심 원천 기술의 개발을 목표로 한다. 본 연구에서 개발할 주요 핵심 요소 기술은 지식을 공유하고 협업이 가능한 분산 지능사물 핵심인프라 기술 미션을 인지하고 자율적으로 분배 및 자가조직하는 미션 프레임워크 기술 그리고 대규 SW , , SW , 모 사물 사람 공간 복잡 적응계 초연결 지능공간 응용 스마트 제조 재난 대응 기술로 구성된다- - ( , ) . 본 연구는 초연결 환경에서 분산된 지능요소들간의 협력 기술을 바탕으로 인공지능 기술 혁신을 선도하 는 역할을담당할 것이며 이를 위해 분산된 에이전트 간의 상호작용 과정에서 지능을 개입시켜 합의 및 , 의사결정 자율성을 부여하는 방식으로 기술 개발을 추진한다 본 연구의 결과물은 불확실성을 내포하는 . 현실세계의 문제를 해결하는데 활용할 것으로 예상한다 특히 현장에서의 빠른 대응이 요구되는 즉시성 . 응용은 빠른 의사결정이 중요하며 본 연구결과물의 적용시 네트워크 연결 지연 또는 단절이 발생하 IoT , 여도 의사결정 기능 제공이 가능하다. 현실세계에 문제가 발생하였을 때 크게 피해를 볼 수 있는 재난 또는 제조현장에서 본 연구를 우선적으 로 적용할것이며, Simulated Reality 기술을 통해 가상공간에 복잡성을 갖는 사회 경제 시스템 그리 , , 고 기술환경 자연세계 등을 재현하는 동적 분석 및 예측 분석 환경을 구축 할 수 있다/ . 연구내용 및 범위 . Ⅲ 본 연구는 초연결 공간의 사물인터넷 환경에서 공간에 주어진 미션을 인지하고 지능 사물간 협력을 통, 해 자율적인 문제해결 기술을 제공하는 지능형 사물 분산 협업 원천 핵심 기술 확보를 목표로 한다. 2 차년도에는 지능형 사물 분산 협업 원천 핵심 기술 확보를 위한 개념정립 기술 요구사항 도출 및 핵심 , 요소 기술을 분석하며 최종연도에는 , ALFUS레벨 8 기준을 만족하는 자율 분산지능 핵심 기술을 반영한 연구시작품을 제작하여 개념 검증을 위한 제조 및 재난안전 분야에 적용을 단계적으로 추진한다. 당해연도(2차년도, 2019)의 연구개발 목표는 다음과 같다. ! 지능사물 에이전트 기반 분산협업 핵심기술개발 ! 미션기반 지능사물 조직화 기술 개발 ! 현실공간과 초연결 공간간 정밀 정합을 위한분산지능 응용 기능 설계 및 요소기술 개발 당해연도(2차년도, 2019)의 세부적인 연구 범위는 다음과 같다. ! 협업 지능 사물 서비스 도메인 지능 정보모델 명세 배포 기술 개발 - ,분산 지능사물 간 협업을 위한 지식 분할 공유 병합 기술 개발 - , , ! 미션 자율 인지 지능사물 협업을 위한 에이전시 구성기술 개발 - 미션수행을 위한 에이전시 기반 태스크 분해및 할당 기술 개발 - 미션 수행 결과 분석 및 피드백 기술 개발 - ! 초연결 지능공간 분산지능 응용 가상공간기반 지능적 협업 트레이닝 및 시뮬레이션기술 개발 - 분산지능사물 기반 생산 미션 수행을 위한동적 작업계획 및 할당 기술 개발 - 재난안전 분산 지능사물의 미션 협업 대응 지식화 참조 모델 개발 - / / 지능사물의 실행환경 및 통합 운용을 위한기능 및 구조 설계 - 연구결과 . Ⅳ 본 연구의 당해연도 결과물은 초연결 공간의 분산 지능의 구성요소인 지능사물 에이전트 협업대응 플, 래닝 협업지능 강화학습 가상환경 분산학습, , , 초연결 지능공간 협업 응용 기술에 대한 시스템 구조설 계 시나리오 도출 및 시제품 구현이다, . 연구개발결과의 활용계획 . Ⅴ 본 연구의 최종 결과물은 현실공간과 초연결 공간의 분산지능 기술 요구사항을 반영한 시스템 사람 사 -물 공간이 복잡하게 연결되어 있는 초연결 공간의 지능형 에이전트 자율협업 핵심기술을 확보하여 현 -실 사회 문제 해결에 활용하고자 한다. 본 연구의 핵심요소 기술인 분산지능 해법은 가상환경에서 논의되어 왔던 지능의 탈집중화 및 지능사물 기반의 분산화흐름을 현실세계로 소환하는 효과가 있으며 사물에 지능을 부여하는 기술을 통해 센서 , 수준의 사물로 구성된 현실 공간에서 지능화된 서비스를 가능하게 할 것으로 예상하고 있다. 본 연구의 핵심요소 기술이 필요한 대표적인 분야로는 제조 교통 물류 에너지 소셜네트워크 등이 있, , , , 으며, IoT 센서와 액츄에이터가 설치된 모든 공간에서 로컬 최적화를 통해 글로벌 유사 최적화 솔루션 을 제공하는 현실적인 대안이 될 수 있다 또한 로컬 최적화 문제를 해결하는 원천기술은 다양한 산업. , 분야에 활용되어 새로운 솔루션을 창조할 수 있다 특히 과제 수행의 결과 지능 응용으로 개발될 제조. , 분야 및 재난안전분야는 분산지능을 활용한 문제 해결의 실례를 보여줄 것이며 해당 산업 현장에서 본 , 연구에서 구축된 시스템을 즉시 활용할 수 있다. 기대성과 및 건의 . Ⅵ 본 연구를 통해 차세대 인공지능 핵심 기술인 협력지능에 대한 선도적 연구 수행으로, AI 분야의 기술 적 추격자에서 선도자로 전환하여 미래유망 연구분야를 선점할 수 있다 수십년간 이론적 중심으로 정. 립되고 제한된 가상조건 하에서 논문연구의 검증 수준에서 판단되어 왔던 분산 AI 기술을 현실세계의 문제에 직접 적용 및 검증하는 최초의 시도임에 의의가 있다. 미션 크리티컬한 시스템 구축에서는 미션을 시스템에 이해시키는 과정이 설계자와 프로그래머의 역할, 즉, 일종의 중앙지능으로 인식되었고 많은 개발시간과 사전검증이 매우 중요하였으나 본 과제에서는 , 센싱과 액츄에이팅에 기반한 환경에서의 자율적 대응 뿐만 아니라 미션에 대한 인지와 자율적 적응이 가능한 기술을 개발하여 다양한 현실 복잡계 문제를 편의적으로 해결하는데 기여할 수 있다.
목 차
제 장 서론
1
... 1
제 절 연구배경
1
... 1
제 절 연구목표 및 내용
2
... 2
1. 최종목표 ... 2
2. 연차별 연구개발 목표 및 내용 ... 3
3. 당해연도 성과지표 및 목표 설정 ... 7
제 절 국내외 연구개발 동향
3
... 8
1. 국내외 기술동향 및 수준 ... 8
제 장 사물 사람 공간의 유기적 연결을 위한 초연결 공간의 분
2
-
-산 지능 핵심원천 기술 개발 ... 15
제 절 연구개발 추진 체계
1
... 18
제 절 기술개발 추진 일정
2
... 20
제 절 당해연도 추진실적
3
... 22
1. 계획 대비 실적 ... 22
2. 실적 세부 설명 ... 28
제 절 연구개발 결과
4
... 97
1. 연구개발 결과 요약 ... 97
2. 연구개발 결과 세부 내용 ... 98
제 장 연구개발 결과의 활용 계획
3
... 117
제 장 결론
4
... 118
제 장 연구원 참여현황
5
... 119
제 장 연구비 사용실적
6
... 124
약어표 ... 125
그림목차
그림
최종 연구목표
(
1)
... 2
그림
분산지능의 개념적 분류
(
2)
... 9
그림
개념도
(
3) CPSwarm
... 9
그림
하버드대학 킬러봇
(
4)
... 10
그림
추진체계도
(
5)
... 18
그림
멀티에이전트 기반 협업 태스크 모델
(
6)
... 28
그림
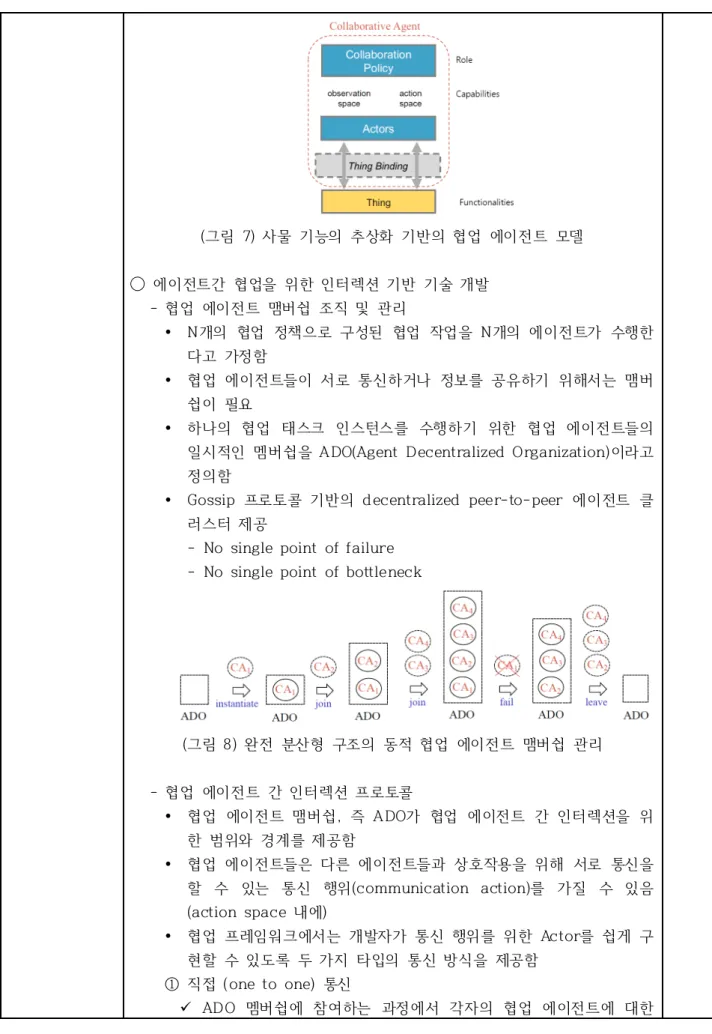
사물 기능의 추상화 기반의 협업 에이전트 모델
(
7)
.... 29
그림
완전 분산형 구조의 동적 협업 에이전트 맴버쉽 관리
(
8)
... 29
그림
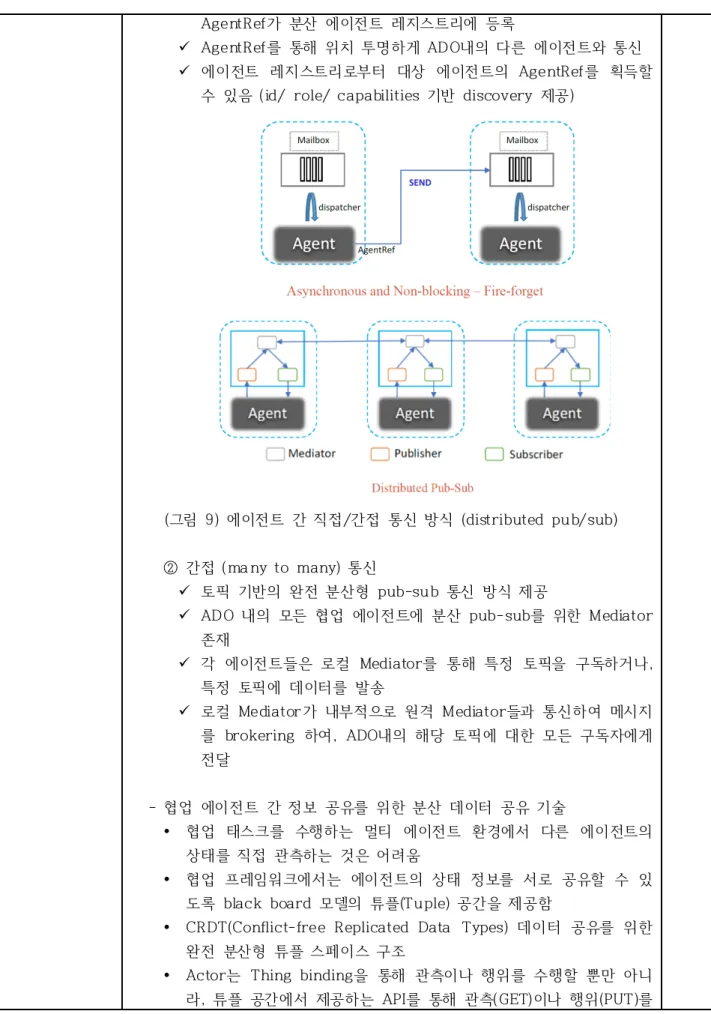
에이전트 간 직접 간접 통신 방식
(
9)
/
... 30
그림
협업 에이전트 간 상태 정보 공유를 위한 분산 튜플
(
10)
공간 ... 31
그림
프레임워크 협업 프로토타입 시나리오
(
11) ADO
... 32
그림
하드웨어 및 테스트베드 환경
(
12)
... 32
그림
로봇 상에서 실제 시나리오가 동작하는 모습
(
13)
... 33
그림
바텐딩 로봇 도메인 및 종 칵테일 제조 작업 계획 생
(
14)
2
성 예 ... 34
그림
바텐딩 로봇 도메인의 상황 및 작업 지식 베이스 예
(
15)
... 35
그림
작업패턴 학습
휴리스틱 검색 기반 작업 계
(
16) HTN +
+
획 생성 기술 ... 36
그림
작업계획 실행 및 모니터링을 위한 분산 시스템 구조
(
17)
... 37
그림
시 ... 38
그림
(
19) 플래닝 공간 모델화 개념도 ... 38
그림
(
20)
ROS
기반 자율 탐색 시스템 구조
... 38
그림
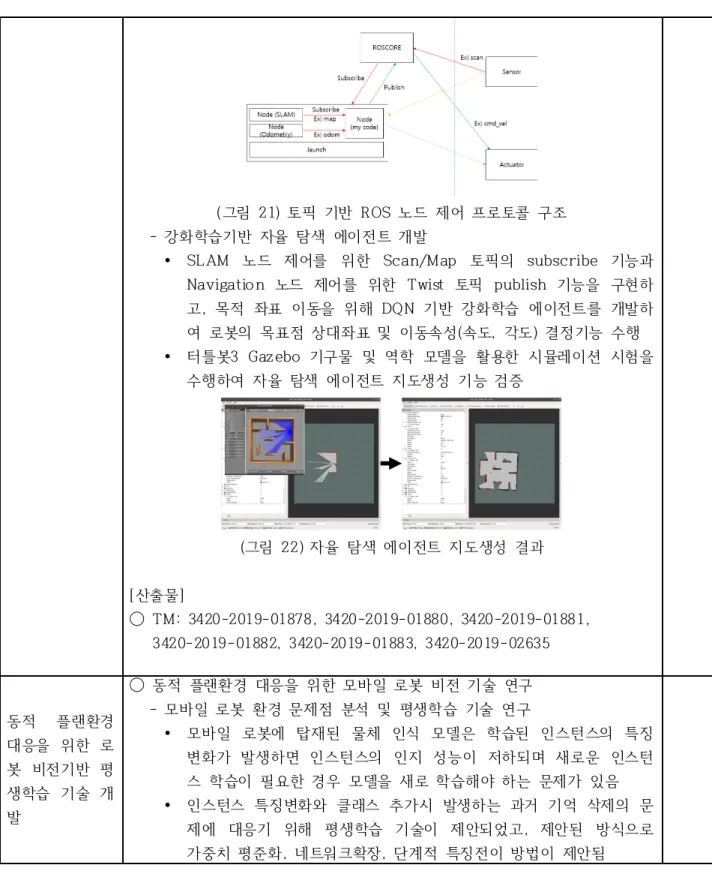
(
21) 토픽 기반
ROS
노드 제어 프로토콜 구조
... 39
그림
(
22) 자율 탐색 에이전트 지도생성 결과 ... 39
그림
(
23) 평생 학습 기술 분류 네트워크 확장 상 및 단계적 특
:
( )
징전이 하
( ) ... 40
그림
(
23-1) 평생학습 데이터셋 특성 분석 좌 및
( )
Selective
프로그램 구조 우
Feature Learning
( ) ... 40
그림
(
23-2)
IROS2019 Robotic Vision
경진대회 결과
... 40
그림
(
23) 평생 학습 기술 분류 네트워크 확장 상 및 단계적 특
:
( )
징 전이 하
( ) ... 40
그림
환경
(
24) MTMA
... 41
그림
(
25) MTMA Problem Formation ... 42
그림
호환
환경
(
26) OpenAI Gym
MTMA
... 42
그림
환경에서 강화학습 알고리즘 성능
(
27) MTMA
... 43
그림
(
28) Centralized Learning & Decentralized Execution
방식의 다중 에이전트 강화학습 기법 ... 43
그림
두 단계의 정책 네트워크로 구성된 계층적 강화학습
(
29)
기법 ... 44
그림
제한된 인지범위를 갖는 다중 에이전트 분산 협업 문
(
30)
제 환경 ... 44
그림
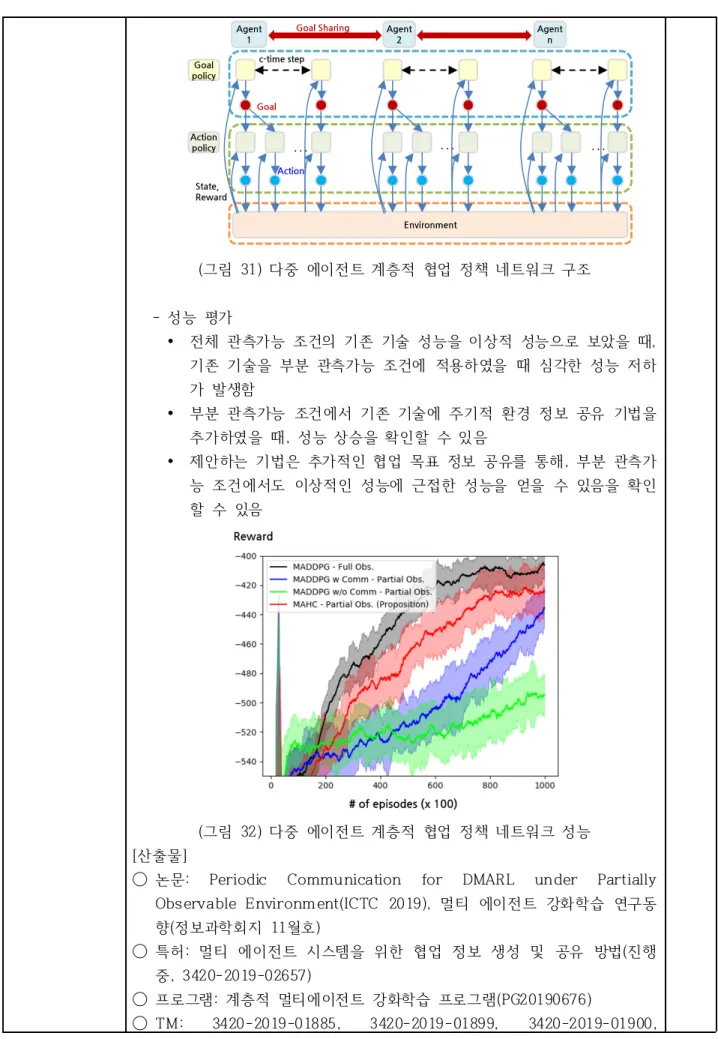
다중 에이전트 계층적 협업 정책 네트워크 구조
(
31)
.. 45
그림
다중 에이전트 계층적 협업 정책 네트워크 성능
(
32)
.. 45
그림
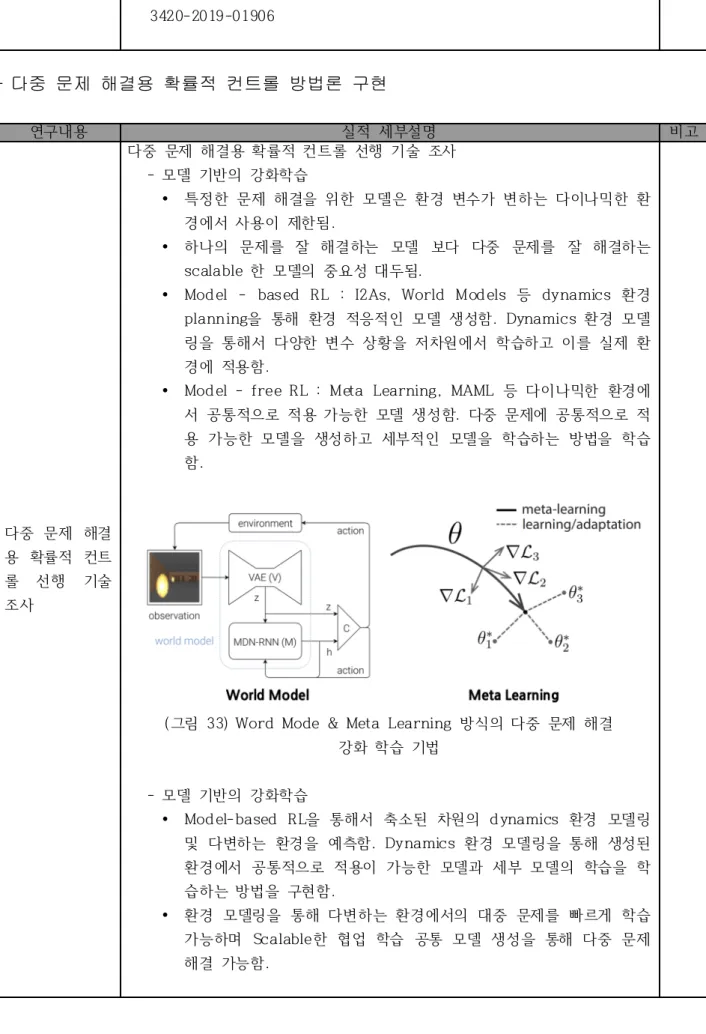
방식의 다중 문제 해
(
33) Word Mode & Meta Learning
결 강화 학습 기법 ... 46
그림
다중 문제 해결을 위한 모델 기반의 강화학습 기법
... 47
그림
다중 문제 해결용 확률적 컨트롤 정책 네트워크 구조
(
35)
... 47
그림
(
36) Generative Query Network ... 48
그림
지식 추출
기술
(
37)
(knowledge distillation)
... 49
그림
클라우드 사물 간 전이 학습 및 모델 경량화의 필요성
(
38)
–
... 50
그림
클라우드 사물 간 정책 모델 전이 및 모델 경량화
(
38-1)
-기술 구조 ... 50
그림
클라우드 사물 간 정책 모델 전이 및 모델 경량화
(
38-2)
-성능 ... 51
그림
병렬 가상환경 기반 협업지능 분산 학습 기능 구조도
(
39)
... 52
그림
협업지능 학습을 위해 활용한 가상환경
(
40)
... 53
그림
분산 병렬 강화학습 프레임워크
(
41)
... 53
그림
멀티 인스턴스 기반 멀티워크 병렬학습
(
42) gazebo
... 54
그림
도커 컨테이너 기반 병렬학습
(
43)
... 54
그림
심층 신경망 기반
혼잡 윈도우 제어 기법
(
44)
TCP
.... 55
그림
최적화 기법
(
45) action space
... 55
그림
문제 해결 위한
(
46) partial observability
state stack
... 55
그림
다중 에이전트 협업 학습
(
47)
... 56
그림
실험 환경
(
48)
, Multi-agent Particle Environment .. 56
그림
에이전트의 행동 보정을 통한
문제 해결
(
49)
Reality-gap
방안 ... 57
그림
기반
기
술 구조도 ... 57
그림
기반
기
(
51) Dynamics model
virtual-to-real transfer
술 식 ... 57
그림
재난 연계 병렬 가상환경 기반 강화학습 플랫폼
(
52)
... 58
그림
재난 연계 가상환경의 상태 행동 공간
(
53)
/
... 58
그림
가상환경 강화학습 미션
(
53-1)
... 59
그림
좌표값 고정시 보상 값 그래프
(
54)
... 59
그림
좌표값 랜덤시 보상 값 그래프
(
55)
... 59
그림
적합 행동 에이전트가 문 앞에서 감속하면서 목표 좌
(
56)
:
표에 도달 ... 59
그림
부적합 행동
에이전트가 코너에서 호버링
(
57-1)
1:
... 60
그림
부적합 행동
벽의 유무에 관계없이 목표 좌표 방
(
57-2)
2:
향으로 직진 ... 60
그림
동시 단일 에이전트 시나리오 성능
(
58)
... 61
그림
커리큘럼 러닝 적용 방안
(
59)
... 61
그림
커리큘럼 러닝 결과
(
60)
... 62
그림
다중 에이전트 기반 지능 학습 시스템 구조도
(
61)
... 62
그림
다중 드론을 이용한 학습 환경 실행 화면
(
62)
... 63
그림
모델 샘플
(
63) In-door 3D
... 63
그림
전문가 시연을 활용한 로봇암의 모방학습
(
64)
... 64
그림
행동복제 기본 알고리즘
(
65)
... 64
그림
역강화학습 기본 알고리즘
(
66)
... 64
그림
강화학습과 역강화학습의 동작구조 비교
(
67)
... 65
그림
전문가 궤적의 모방학습을 통한 최적 정책 도출 시스
(
68)
템 구조 ... 66
그림
모방학습 기반 최적 정책 도출 시스템 동작 흐름도
(
69)
... 66
그림
보상과 정책 업데이트를 위한 모방학습 알고리즘
(
70)
... 67
그림
기술적 문제 정의
(
71)
... 67
그림
기술적 동향 분석
(
72)
... 68
그림
시나리오 단계별 구성
(
72-1)
... 69
그림
협업형 요구조자 탐색 시나리오 예시
(
73)
... 69
그림
사용자 기능 요구사항
(
74)
... 70
그림
사용자 인터페이스
(
75)
... 70
그림
시스템 기능 요구사항
(
76)
... 71
그림
재난안전 서브시스템 구조도
(
77)
... 72
그림
재난안전 서브시스템 프레임워크
(
78)
... 72
그림
재난안전 서브시스템 장치 구동
(
79)
... 73
그림
편대비행 서비스 실행
(
80)
... 74
그림
자율비행 서비스 실행
(
81)
... 74
그림
요구조자 탐색 서비스 실행
(
82)
... 75
그림
무인기 비행 제어 방법 및 방법에 따른 구조설계
(
82-1)
... 75
그림
무인기 종류 제작 및 제어환경 구성
(
83)
2
... 76
그림
기반 제어환경 및 제어 구조
(
84) Leader Follower ROS
–
설계 ... 76
그림
무인기 제어 전체
및 위치 제어
(
85)
ROS Topic Graph
의 구조
Node
...
76
그림
실외환경 위치 제어 기반 다중무인기 편대비행
(
86)
.... 77
그림
알고리즘 중
으로 실내맵 작성 연구
(
87) SLAM
RTABMAP
... 77
그림
영상 관성 기반 위치 인식 알고리즘 중
(
88)
–
연구
VINS-FUSION
... 77
그림
를 통한 실시간 실내
(
89) TX2, D43i, VINS-FUSION-GPU
위치추정 ... 78
그림
통신인프라가 없는 환경에서의 이동형 애드혹 망의 예
(
90)
... 78
그림
그룹 통신 모듈의 구성도 좌 와 제작된 보드 및 드론
(
91)
( )
에 부착 상태 우
( ) ... 78
그림
데이터 포맷의 수용 방안 설계
(
92) MavLink
... 79
그림
기반의 데이터 라우팅
(
93) Target ID
... 79
그림
이동형 애드혹 망을 통한 서비스 시나리오
(
94)
... 79
그림
스마트밴드의 기능
(
95)
... 80
그림
관리자용 앱 구성
(
96)
... 80
그림
요구조자용 앱 구성
(
97)
... 80
그림
무인기 비행기 시뮬레이션
(
98)
... 81
그림
소형 무인기 개발
(
99)
... 81
그림
소형 무인기 센서
(
100)
... 82
그림
협업형 다중무인기 비행 시뮬레이션
(
101)
... 82
그림
객체인식 결과화면
(
102-1)
... 83
그림
객체 인식 노드 실행 결과 화면
(
102-2)
... 83
그림
모션 인식 결과 화면
(
103)
... 84
그림
모션인식노드 실행결과화면
(
104)
... 84
그림
상황추론 결과화면
(
105)
... 85
그림
학습모델 관리화면
(
106)
... 85
그림
장비정보 관리화면
(
107)
... 86
그림
학습모델 배포화면
(
108)
... 86
그림
제조분야 자율성 레벨 정의
(
109)
... 87
그림
단계 예상 시나리오 부품 자율 이송 및 협업 조립
(
110) 1
:
시스템 ... 88
그림
당해년도 시나리오 부품 자율 이송 및 조립 시스템
(
111)
:
... 89
그림
자율 생산 시스템 흐름도
(
112)
... 89
그림
자율 생산 시스템 모듈 구성도
(
113)
... 90
그림
시스템 폴더 및 파일 구성 및 파일 형식 예시
(
114)
.... 91
그림
파일 내 부품 구조 및 구성
(
115) Step
... 91
그림
모델 및
파일 내부 제품 부품 정보
(
116)
STEP
/
... 92
그림
기반 부품 작업 순서 결정 프로세스
(
117) Rule
... 92
그림
동작 계획을 위한 단위 동작 구분 및 명칭
(
118)
... 93
그림
간 메시지 흐름 방식
(
119) UI
–
Core
... 94
그림
개발 모델정보 분석 좌 공정 및 동
(
120) User Interface
:
( ),
작 계획 우
( ) ... 94
그림
시스템 구성 로봇팔과 로봇손 주황
차원
(
121) Agent1
:
(
), 3
카메라 파랑
(
) ... 95
그림
시스템 구성 로봇팔과 로봇손 주황
차원
(
122) Agent2
:
(
), 3
카메라 파랑
(
) ... 95
그림
대상 부품
(
123)
... 96
제 장 서론
1
제 절 연구배경
1
딥러닝 기술의 등장과 다양한 산업분야에서 AI의 적용으로 다시 붐을 일으키고 있는 인공지능은 이제 다음 단계로 진입할 준비가 필요하다 현재의 인공지능은 인간의 지능적인 작용들을 이해하려는 학문으. 로 학습 추론 인식에 집중되어 있다 다음 단계의 인공지능이 어느 방향으로 진화될 지를 추측하는 것, , . 은 매우 어려운 일이지만 인간의 지능을 모방하면서 시작된 기술이기 때문에 인류의 진화에서 그 힌트, 를 찾을 수 있다 사회학적으로 사람은 집단 거주와 상호 협력에 의해 진화해 나간 것으로 연구되어 있. 어 인공지능의 다음 단계는 협력지능이 될 것으로 예측할 수 있으며 이는 지능이 분산된 분산지능 환경, , 이 전제가 된다. 기술은 연결성과 관리 중심의 에서 초연결성 지능 중심의 으로 진화 중이며 기존 연결성 IoT 1.0 , 2.0 , 및 정형적 관리모델 기반의 문제해결 기술로는 해결하기 어려운 문제로 사물의 연결 발견 등록 탐색 , , , , 등 모든 것이 인터넷에 연결된 세상을 이루기 위한 IoT 1.0에서 이젠 사물에 지능을 부여하여 현장에서 문제에 대응하는 즉시적 해결이 가능한 기술 개발 수요가 증가하고 있다.글로벌 시장 동향 조사기관인 ABIresearch 및 Gartner에서는 IoT 장치가 생산하는 데이터의 양이 폭 발적으로 증가하는데 반해 데이터 처리를 위한 기술이 부족한 것을 지적하고 있다 프로그래밍 해야 할 . 규칙이 너무 복잡하고 외부 요소가 많으며 반복적인 작업의 오류와 지연에 따른 문제 해결과 데이터의 가치를 창출을 위해 IoT 단말에서 자체적으로 데이터를 처리하는 기계학습 및 AI기반의 지능화 기술 도 입이 필요할 것으로 전망하였다. 본 연구는 초연결 공간에산재된 지능 사물들이 상호간에 연결되고 협력하여 그 공간에 주어진 미션, 과 공간의 다양한 환경을 인지하고 상황에 맞게 효율적으로 자율적으로 해결하는 초연결 공간의 분산, , 지능 핵심 원천 기술을 목표로 한다 본 연구를 통해 복잡하게 얽혀있는 교통 금융 제조 재난안전 소. , , , , 셜네트워크 에너지 등 현실 세계에서 풀기 어려운 초연결 공간의 문제 해결을 위한 솔루션 개발을 추, 진하고 있다 연구의 목표를 달성하기 위해 . MAS(Multi-Agent System) 기술의 활용을 검토하고 있으며, 로컬 최적화 방법을 통해 복잡한 현실세계의 문제를 해결할 수 있다 현재까지 . MAS 기술은 컴퓨터 게 임과 같은 가상공간에서의 복잡한 문제 해결에 활용되고 있으나, 현실 세계와 결합한 문제 해결 또는 현실세계에서의 분산지능 적용을 위한 연구가 필요하며 본 과제의 연구범위에 포함되어 있다. “사물 사 -람 공간의 유기적 연결을 위한 초연결 공간의 분산 지능 핵심원천 기술 을 바탕으로 유망 연구분야의 - ” 선점을 통해 국가 과학기술의 경쟁력 향상에 기여할 수 있다. 본 연구에서 초연결 공간에서의 복잡한 문제 해결을 위해 개발하고자하는 개발 분산지능의 주요 핵 심 기술 요소와 접근 방법은 아래와 같다. - 미션의 정의 및 표현 자율적 분할 및 분배, - 지능사물이 연동하여 새로운 협업지능을 구성하는것 - 지능과 미션의 하모나이징 - 미션 혹은 태스크를 수행하는 지능형 사물간의합의 - 분산지능의 학습
본 연구에서 개발한 원천기술은 다음과 같이 실제적인 분산지능이요구되는 시나리오에 적용하여 개념을 검증한다. - 분산지능 기반의 인간의 인지 증강 지능 응용 개발은 재난안전 지역과 같은 인프라가 상실된 극한 열악 현장에서 주변의 위험요소를 인지하고 안전하게 대응하는 기술을 구현하여 검증 · , - 분산지능 기반 자율 생산시스템 지능 응용은 중앙집중식의 생산계획을 분산된 환경 속에서 최적에 가까운 생산라우팅을 지원하는 기술을 구현하여 검증 - 현실적인 검증이 가능한 지능 응용 시나리오를 개발하되 궁극적으로 결과물이 적용되어야 하는 복잡계 , 시스템에서의 실현가능성 검증을 위해 지능 응용과 시뮬레이션 환경을 매시업하여 기술 검증 수행
제 절 연구목표 및 내용
2
1.
최종목표
본 연구는 사물인터넷 기반 초연결 환경에서 공간에 주어진미션을 인지하고 지능사물 간 협력을 통, 해 자율서비스를 제공하는 지능형 사물 분산 협업 원천 기술 확보를 목표로 한다. 그림 ( 1) 최종 연구목표 이를 통해 달성하고자 하는 세부 기술개발 목표는 다음과 같다. - 지식을 공유하고 협업이 가능한 분산 지능사물핵심 인프라 SW - 미션을 인지하고 자율적으로 분배 및 자가조직 하는 미션 프레임워크 , SW - 대규모 사물 사람 공간 복잡성 모사 초연결 지능 공간 - - Simulated Reality 지능 응용 제( 조 재난안전 개발, )2.
연차별 연구개발 목표 및 내용
본 연구의 연차별 연구목표 및 내용은 다음과 같다. 차년도 (1 , 2018) 경량 지능사물 에이전트 핵심기술 개발 미션 기반 분산지능 핵심기, 술 개발 현실공간과 초여결 공간간 정밀정합을 통한 지능 응용 기능 정의 및 요소기술 , 분석 o 경량 지능사물을 위한 인지 추론 의사결정 기술 개발, , o 피드백 기반 경량형 지능사물 강화 학습 기술 개발 o 사물 사람 공간 관계 분석을 통한 분산지능 요구사항 및 기능 정의- -o 분산지능 조직화를 위한 미션 정보 모델 개발 o 미션 수행을 위한 태스크 정보 모델 개발 o 사물지능 분산 협업을 위한 시뮬레이션 요소기술 및 구조 설계 o 온디맨드 이종 제품의 효율적 생산 미션 수행을 위한 동적 작업 스케쥴링 요소 기술 설계 및 의사결정 방식 모델링 o 재난안전 초연결 공간 구성을 위한 인지증강 요소기술 및 미션 대응 지식 저작기술 개/ 발 o 사물 사람 공간의 분산 지능 운용 환경을 위한 통합 프레임워크 및 인터페이스 기능 - -정의 차년도 (2 , 2019) 지능사물 에이전트 기반 분산협업 핵심기술 개발 미션 기반 지능사물 , 조직화 기술 개발 현실공간과 초연결 공간간 정밀 정합을 위한 지능 응용 기능 설계 , 및 요소기술 개발 o 서비스 도메인 지능 정보모델 명세 배포 기술 개발, o 분산 지능사물 간 협업을 위한 지식 분할 공유 병합 기술 개발, , o 지능사물 협업을 위한 에이전시 구성기술 개발 o 미션수행을 위한 에이전시 기반 태스크 분해 및 할당 기술 개발o 미션 수행 결과 분석 및 피드백 기술 개발 o 가상공간기반 지능적 협업 트레이닝 및 시뮬레이션 기술 개발 o 분산지능사물 기반 생산 미션 수행을 위한 동적 작업계획 및 할당 기술 개발 o 재난안전 분산 지능사물의 미션 협업 대응 지식화 참조 모델 개발/ / 차년도 (3 , 2020) 분산협업 지능사물 에이전트 프로토타입 개발 미션기반 지능사물 동적 , 조직화 및 다중 미션 처리 기술 개발 분산 지능사물 용뮬레이션 참조 시스템 개발 및 , 초연결 공간 지능 응용 구성 o 자원적응적 인지 추론 학습 판단 지능요소 조합 기술 개발, , , o 협업 지능사물 에이전트 검증을 위한 프로토타입 구현 o 자원 및 제약 상황을 고려한 조정자 지능사물 에이전트 기술 개발 o 동적 조직화를 위한 분산 지능사물 탐색 기술 개발 o 다중 미션 처리 기술 개발 o 현실공간과 초연결 공간간 복잡계 지능 협업 에이전트 V&V 기술 개발 o 제조 현장내 분산 지능 사물의 생산 미션 수행 협업 참조 모델 및 제조상황 시뮬레이/ -션 연계 시범 지능 응용 구성 o 재난안전 분산 지능사물의 재난상황 시뮬레이션 연계 시범 지능 응용 구성 -o 분산지능 에이전트 운용 프레임워크를 위한 모니터링 도구 개발 차년도 (4 , 2021)지능사물 에이전트 기반 분산협업 기술 고도화 개발 미션기반 지능사물 , 자율 조직화 핵심 기술 개발 분산사물 협업 기능 및 자율조직화 지원을 위한 지능 응, 용 연동 기능 개발 o 자원적응적 인지 추론 학습 판단 지능요소 조합 기술 개발, , , o 추상 자원명세 및 최적 자원 지능 매칭 기술 개발
-o 환경 및 상황 변화에 적응 가능한 분산지능 재계획 기술 개발 o 자율조직 구성 지식베이스 구축 및 검색 기술 개발 o 분산 사물협업 지능 및 자율조직화 지원 시뮬레이션 아키텍쳐 개발 o 유연제조 워크플로우 프로세스 지식베이스 구축 및 분산 사물지능 핵심기술연동 시스/ 템 개발 o 재난현장 시뮬레이션 (FDS 등 연계 지식저작 및 이를 활용한 분산 사물지능 협업 핵심) / 기술 검증 o 지능 응용 통합 운용 시험 환경개발 차년도 (5 , 2022)분산 지능사물 협력학습 기반 분산지능 진화 기술 개발 미션 자율 인지 , 및 분산 지능사물 합의 기술 개발 사물지능 패턴 및 분산 조직화 활동 단계적 검증 , 기술 개발 o 지능 별 학습모델 개발 및 분할 병합 기술 개발, o 자원적응형 인지 학습 프로파일링 및 프로파일 배포 기술 개발, o 상황적응형 미션 자율 인지 기술 개발 o 동적 미션 수행을 위한 합의 기술 개발 o 복잡 환경에서 사물협업 및 자율구성을 위한 지능형 V&V 시뮬레이션 기술 개발 o 분산지능사물기반 자율공정설계 지원 제조지능 응용 프로토타입 구축 및 기술 검증 o 재난안전 빅데이터 사고조사 ( DB,이력 기반 학습을 통한 복잡 미션 자율해결형 동적 ) ( ) 자가조직화 핵심기술 검증 o 대규모 분산 지능 에이전트 운용 프레임워크를 위한 다차원 모니터링 도구 개발 차년도 (6 , 2023)진화 분산지능 프로토타입 구현, 자율조직 기반 분산지능 고도화 기술
개발 현실공간과 초연결 공간간 정밀 지능 응용 통합 시스템 개발 및 시험, o 임무기반 분산 협업 모니터링 및 학습데이터 변환 기술 개발 o 진화 분산지능 프로토타입 개발 o 자율조직 재구성 및 재계획 최적화 기술 개발 o 자율조직 기반 분산지능 기술 통합 검증 및 보완 o 현실공간과 초연결 공간간 정밀 정합 지원 V&V 시뮬레이션 시스템 통합 검증 o 생산 미션 수행 제조지능 응용 자가진화 의사결정기술 최적화 기술 개발 / o 재난안전 초연결 공간 지능 응용를 통한 사물지능 자가조직 자율적응 기술 통합 검증/ / o 지능 응용 제조 기반 분산 지능 에이전트 운용 통합 시스템 검증( )
당해연도 성과지표 및 목표설정
3.
가 연구산출물 성과지표
.
공통지표 필수제시( ) 자율지표 자율제시( ) 지표명 총사업연도 ‘19년도 지표명 총사업연도 ‘19년도 과학적 성과 표준화된 IF 상위 논문 건 20% SCI ( ) 4 -논문 건 SCI/SCIE ( ) 제출 12 3 학회 Top100 논문 건 제출( ) 3 기술적 성과 특허활용률 기술이전건수 ( / 특허등록보유건수) 20% - 국내 국제특허 출원/ ( ) 42/20 8/5 국제표준특허 건( ) 1 - 기술이전 건( ) 7 1 국제표준승인표준 기고서 건( ) 1 - 연구시제품 수( ) 34 4 극 특허 건 3 ( ) - - 소프트웨어 등록 63 10 경제적 성과 연구비 대비 기술료 수입(%) 5% 총년도기 ( 준)제3절 국내외 연구개발 동향
1.
국내외 기술동향 및 수준
○ 인공지능 기술 - 구글 애플, , MS, IBM, 페이스북 등 기업 중심으로 헬스케어 무인기기 지식서비스 등에서 상용화 IT , , 사례가 출현하고 있음 ◦ IBM은 왓슨(Watson)과 같은 차세대 분석 플랫폼을 연구개발하기 위해 인공지능에 대한 집중 적인 투자를 진행 중 ◦ 구글은 ’13년부터 시작한 인공지능 맨허튼 프로젝트 에서 실리콘밸리 벤처기업을 참여시키면‘ ’ 서 인공지능에 대해 소프트웨어 알고리즘 과 하드웨어 무인자동차 분야 모두 지속적인 연구개( ) ( ) 발투자를 진행 중 ◦ MS는 미래에 발생할 결과를 예측하는 형태의 가상 비서‘Cortana(코타나 와 인공지능 채팅봇 )’ 테이 를 개발하였으며 시각적 정보를 활용해 어떤 사물도 인식할 수 있도록 하는 아담 ‘ ’ , ‘ 프로젝트 및 수십조의 신경망으로 이뤄진 인간의 뇌를 응용해 뉴런 네트워크를 구축하 (ADAM)’ 고 스스로 학습할 수 있도록 하는 딥러닝 프로젝트를 시행 중 ◦ 페이스북은 ’13년 월 인공지능 연구그룹 출범으로 사람의 측면 얼굴 이미지도 인식하는 기술9 ‘ ’ 인 딥 페이스 개발을 발표하였으며‘ ’ , 2016년 연례개발자회의에서는 인공지능을 메신저에서 사용 가능한 챗봇 에 적용한다고 발표‘ ’ ◦ 애플은 스마트폰 생태계 전반에 영향력을 미치고있는 대규모 사업자로서 ‘SIRI’(개인비서 기능 제공 등 다양한 어플리케이션을 개발하기 위해 인공지능 기술을 접목 중이며) ,‘Project Titan’이 라 불리는 무인전기자동차 개발 프로젝트가 진행 중 ○ 분산지능 기술 - 분산지능(Distributed Intelligence)은 한 곳에서 풀기 어려운 복잡계 문제를 지능을 갖는 에이전트를 분산시켜 해결하는 기술- 분산지능은 DPS(Distributed Problem Solving), MAS(Multi-Agent System), SI(Swarm 로 구분되며 각각의 차이는 아래와 같음
Intelligence), PAI(Parallel AI)
◦ DSP: 하나의 커다란 문제 해결을 위해 문제를 나누고 분산된 노드에서 처리하고 부분적 결, , 과를 매시업 하여 최종 결과를 도출하는 방법 ◦ MAS: 각기 다른 관심과 목적을 갖는 이종의 분산 노드 환경에서 각 노드들은 협업과 경쟁 동, 의와 부정의 과정으로 결과를 도출 ◦ SI: 동일한 관심과 목적을 갖는 동종의 분산 노드 환경에서 마스터 플랜 없이 각 노드의 단순 한 절차를 통해 결과를도출 ◦ PAI: 병렬처리 시스템을 활용한 AI - 분산지능이 구현되는 IoT 환경은 일반적으로 불특정한 이종의 디바이스들이 상호간에 연결되어 정보 를 교환하고 각기 다른 관점의 결론을 통해 의사결정을 하는 시스템으로 MAS와 유사함
(그림 2) 분산지능의 개념적 분류 ○ 군집지능(Swarm Intelligence) 기술 - EU는 2016년부터 H2020을 통해 CPSwarm 이라는 프로젝트를 수행하고 있으며 프라운 호퍼를 비롯한 총 개의 기관이 공동연구를 수행하고 있음8 - CPSwarm에서는 분산된 CPS간 협업을 하기위한 각종 툴체인을 제공하고 다양한 목적, 에 따라 모델별 라이브러리를 제공하여 시뮬레이션을 수행하며 실환경과 연계를 시킬 수 있는 CPS간 자율적 통합운용환경 개발을 목표로 하고 있음 (그림 3) CPSwarm 개념도 ○ 군집 로봇 기술 - 군집지능을 활용한 로봇 제어기술 개발이 활발하게진행되고 있으며 복수의 무인기와 , 물류 로봇 제어의 충돌방지 및 경로 최적화 등에 활용
- 군집로봇에 대한 연구는 군집을 이루는 생명체를모방하여 로봇들 간의 직접적인 정보 교환 없이 개별적 행동의 집합이 군집 지능으로 발현되는 좁은 의미의 군집로봇 즉 스, 웜로봇에 집중해 온 경향이 강함 - 실제적으로 활용도가 높은 군집로봇은 전체로봇 팀의 임무를 결정하고 상호간 교신하며 역할을 분담하여 작업을 하는 방식으로 운영체계를 갖추어야 하는데 이를 지원하는 표, 준 아키텍쳐의 부재가 큰 문제로 대두 - TerraSwarm은 2013년부터 구성되어 연구중인 조직으로 군집 연구를 수행중인 개 대9 학(UC Berkeley 외 이 참여하고) , DARPA, IBM, 인텔 등이 함께 연구를 수행 중으로 군, 집 기술과 관련된 플랫폼의 OS, 클라우드와의 연계 모델과 방법론 각종 응용 서비스, , 등 전 분야에 대한 연구를 수행중 (그림4) 하버드대학 킬러봇 ○ 멀티 에이전트 시스템 - 멀티에이전트 시스템은 복잡계 문제를 해결하기위해 다수의 에이전트가 서로 상호작용 하여 임무를 수행하는 시스템임. - 멀티 에이전트 시스템은 1990년대 제안된 이후 현재까지 특정 문제를 모델링하고 시뮬 레이션 하는 분야에 가장 많이 쓰이고 있음 - 멀티에이전트시스템의 가장 알려준 분야는 로봇축구 - 최근 인공지능 분야도 개별 단위 인공지능에서사회성 협력 경쟁 모델을 가진 멀티 에, , 이전트 기반 인공지능으로 발전하고 있음 - 최근에는 멀티 에이전트 강화학습을 통해 에이전트가다른 에이전트의 영향을 받아 강화 학습을 수행하는 분야가 인공지능 학계의 큰 트렌드임
- 최근 VR엔진 중 하나인 유니티엔진 (Unity)에서 인공지능 에이전트(machine learning 를 추가하여 을 통해 에이전트끼리 경쟁 협동 분업이 필요한 상황에서 발
agents) VR , , ,
- 미국N SF에서 후원한 미국 로보틱스 로드맵 인터넷에서 로보틱스로‘ - (A Roadmap for 중 다중 로봇 멀티 에이전트 기술에 US Robotics From Internet to Robotics 2016)’ - ( ) 따르면 이 기술은 주로 제조업 물류 창고관리, , ( ), 네트워크 연장 재난감시 건설 등 다, , 양한 분야에서 활용되지만 현재 기술수준은 단순한 동종 로봇집합을 제어하는 수준에 , 머무르고 있으며 향후 이기종 로봇의 제어와 단시간에 동작을 최적화 하는 기술의 개, 발이 필요함 - 산업계측면에서 멀티 에이전트 시스템은 분산된 구조에서 탈 중앙화 된 컨트롤을 가능 하게 해주고 있으며 주요 산업 분야로는 크게 아래의 가지가 있음, 6 ◦ 생산관리 수요공급체인 및 로지스틱스 분야에서는 생산 스케줄링 및 리소스 분배, , 유동적엔 차량 및 제품 라우팅 기술에 MAS 적용 ◦ 교통관제의 경우 복잡한 상황 환경에서의 교통 흐름 최적화 방안 차량간의 커뮤/ , 니케이션 공중에서의 교통관제 기술 등에 적용, ◦ 에너지 및 스마트 그리드 분야서는 대규모네트워크의 에너지 생산자와 소비자 모 니터링 및 매니징 재사용 가능한 리소스의 재분배 효율적으로 다수의 전기차를 , , 충전하는 방법등의 세부 분야가 있음 ◦ 빌딩 및 홈 오토메이션 분야에선 분산된 오토메이션기계들의 네트워크 모니터링 및 매니징 기술 분야가 존재 한다. 또한 멀티 에이전트에 기반한 지능적인 제어 시스템을 활용하여 빌딩에서의 효율적인 에너지 및 편의 관리 시스템 개발 ◦ 국방 및 방어체계에선 감시, 패트롤 안전한 수송 미지 탐사 등의 목적의 다중 , , 로봇 그룹 컨트롤 및 제어에 적용 ◦ 네트워크보안의 경우 분산된 네트워크 트래픽 분석 및 공격 감지 등에 적용 - 대표적인 멀티 에이전트 개발 플랫폼
◦ JADE – 멀티 에이전트 표준인 Foundation for IntelligentPhysical Agents (FIPA) 를 준수하는 JAVA 기반의 미들웨어로써 멀티 에이전트 시스템 개발을 단순화시 킴 에이전트 기반 미션 및 태스크 수행에 있어 능동화된 서비스를 제공하기 어려. 움. ◦ Jadex – JADE의 확장 버전으로 추론 엔진에 기반한 지능형 에이전트를 , XML과 로 구현할 수 있게 함 기존 의 태스크 지향적인 에이전트에서 목적 지 JAVA . JADE 향적인 특징이 있음. ◦ Swarm – Swarm은 군집지능의 모델링 및 시뮬레이션을 위한 목적으로 재사용 , 가능한 에이전트 기반의 모델링을 제공함. Swarm의 기본 단위는 스웜이며 스웜, 들이 계층적인 구조를 형성하는 중첩구조(nested structure)를 형성함 이기종. IoT
환경을 모델링하기 적합하지 않음. ◦ Cougaar – 미국국방성 DARPA의 지원을 받은 프로젝트로 군사 수송 문제를 해, 결하기 위한 오픈소스 에이전트 플랫폼임 대규모 분산된 환경에서 멀티 에이전. , 트 시스템을 개발하기 용이하게 해줌. - 기존 멀티 에이전트 시스템은 주로 수동적인다수의 에이전트에게 태스크를 부여하고 수 행 결과를 취합하는 수준의 한계를 보여줌 따라서 사용자가 부여한 미션을 인지하고. , , 분산 사물 간 자율 연결 및 자가조직 기술이 현재 미흡함. 또한 추론 등의 머신러닝 , 기법이 적용된 플랫폼의 경우 분산 사물 간 협업보다는 단일 사물에게 단순한 수준의 인지능력을 부여하는 데에 그침. 결과적으로 대규모의 복잡계 문제를 해결하기 위해 , 지능사물 기술 미션 자율인지 및 협업 기술 등이 융합된 분산 지능 기술이 필요함, . ○ 재난안전ICT융합 - 소방방재청은 미래환경 변화로 인한 재난 재해에대응할 수 있도록 재난안전 대응기술에 · 대한 연구개발을 추진하고 있으며, ◦ 재난 재해 현장에 투입되는 구조대원의 위치를추적 및 첨단 센서를 이용한 구조대· 원의 생체정보를 지능화하여 위험감지 실시간 현장통제 및 대응을 위한 국가 재, 난망 구축 등 미래 재난안전 시스템을 위한 첨단 기술 도입 추진 ◦ 이를 바탕으로 국내 기술력을 확보하여 해외시장 진출 모색 - 소방방재청은 화재 진압 현장에서 구조대원의정확한 위치 추적과 상태를 실시간으로 파 악함으로써 구조대원의 생명과 안전을 지킬 수 있고 신속한 화재 진압 및 인명구조가 , 가능해 질것으로 전망 - 구조대원의 안전을 위한 종합적인 모니터링시스템 구현에 관한 연구개발은 미국과 유럽 을 중심으로 약 10년 전부터 진행되어 왔으며 특히 각 분야별 일부 업체에서는 상용, 화를 앞두고 있을 정도로 기술력을 확보함
- 유럽에서는 재난 재해현장에서 구조대원의 안전을위한 · Personal Protective Systems 개 발을 목표로EU FP7 프로젝트 smart@fire를 220만 유로 규모로 2012년 11월부터 수 행 중이며, 2015년까지 공공기관 납품을 위한 상용제품 개발을 목표로 함 ○ 분산IoT 기술 - 최근 다수의 모바일 기기를 활용한 근접기반네트워크에서 다양한 협력 센싱 자료의 분, 산 처리 입출력의 자원풀링, (Resource pooling) 등의 기술을 가능하게 해주는 클라우 드릿(Cloudlet)에 대한 연구가 활발함 - 최근 모바일 기기에서의 대화인식 자연어처리 영상처리 기계학습 증강현실 등과 같, , , ,
은 컴퓨팅 인텐시브한 작업의 사용자 요구가 늘어나며 새로운 아키텍처와 분산처리를 , 통해 이를 해결하려는 연구가 활발함 - 중계서버 없는 장치간 연결 및 분산처리를위한 P2 P기반 프레임워크 또는 라이브러리에 대한 연구가 활발함 - 장치간분산 처리를 통해 여러 장치에 저장 관리되고 있는 데이터 및 정보에 액세스하, 거나 특정 프로세스를 구동하기 위한 동적 실행 제어 기술에 대한 연구가 활발함 - CISCO의 포그 컴퓨팅은 중앙 서버로 운영되는 클라우드와 지역적으로 분산된 사물인터 넷 기기들을 중간에서 연결하고 매개하는또 하나의 네트워크 구성을 지향하는 구조로 제안됨 ◦ 모든 데이터를 중앙 클라우드 컴퓨팅 인프라 에 올려놓고 분산 처리하는 기존 방( ) 식과 달리 주변(edge, 개별기기 에 더 주목하고 있음) ○ IoT에서의 합의 기술 - 블록체인은누군가의 보증없이 내용을 신뢰할 수 있게 해주는 기술로서, 거래 보증을 위한 많은 비용이 발생하던 기존 방법을 개선할 수 있는 기술로 주목을 받음 - 기술의 핵심은 블록체인에 가입된 분산된 노드들이모든 트랜잭션 정보 및 자산 결정 기 록을 공유하고 정보에 대한 수정을 불가능하게 하는 분산, DB와 프로토콜 기술이라 할 수 있음 - 특히 멀티에이전트 시스템의 의사졀정에 있어서 중요한 합의의 도구로 블록체인의 합, 의 기술인 분산합의(DistributedConsensus) 및 이력 맥락(Historical Context)이 사용이 가능함 - 그러나 구현된 블록체인 플랫폼의 무게로 일반적인 , IoT 환경에의 활용에 한계가 있다 는 점 합의의 대상이 신규 블록 결정에 한정되어 제한적이라는 점을 극복해야 활용이 , 가능할 것임 ○ 모사현실 기술 - Forbes는 2013년 혁신의 미래는 시뮬레이션 이라는 기사를 게재 향후 시뮬레이션 경‘ ’ , 제로의 발전 예상 실세계 데이터로부터 현상을 재구성하고 가설을 시험하고 점증하는 . 전략적 분석 시대로 전이중
- 미국 아르곤 국립 연구소의 Repast HPC( High-Performance Computing)는 대규모 시 스템에 적합한 계산능력을 제공하는 ABMS 도구로 군중행위, 도시 시뮬레이션, 교통 흐름 공급 체인 등의 소셜 시뮬레이션이나 최적화 문제 등을 해결하는데 사용,
- 복잡 적응계의 멀티 에이전트 시뮬레이션을위해 1994년 산타페 연구소는 SWARM을 개 발. 1999년 이후 비영리 SW ARM 개발자 그룹에 의해 유지되고 있으며 생물학적 시스, 템 모델링 인류학 컴퓨터 사이언스 생태학 경제학 지리학 정치과학 등에 사용, , , , , ,
- 조지메이슨 대학의 ECL(Evolutionary Computation Laboratory)과 CSC(Center for 의 공동 프로젝트로 개발된
Social Complexity) MASON(Multi-Agent Simulation of 는 자바로 만들어졌으며
Neighborhoods or Networks) ,
◦ 속도가 빠르고 확장이 용이한 이산 사건 멀티에이전트 시뮬레이션 라이브러리로, 모형 라이브러리 및 선택사항인2D/3D 시각화 도구를 포함
- FLAME(FlexibleLarge-scale Agent Modeling Environment)는 하나의 시뮬레이션환경에 서 폭넓은 범위의 행위자 모형과 비행위자 모형을 허용하며, HPC 시스템상에서 대규 모 행위자 시뮬레이션을 지원하고,
◦ 복잡계 시스템을 3D로 시뮬레이션 가능한 조직배양이나 신호전달 등의 의학과 생 물학과 재정 모델링 증에 주로 사용
- IRD연구소(Institute of Research for Development)를 중심으로 GIS를 연계한 다양한 프로젝트에 사용된 시뮬레이션 도구인GAMA(GIS and Agent-based Modeling
는 Architecture) ,
◦ 지리적인 데이터와 GIS를 통합하여 시간 공간 행위를 포함하는 다수준 모델링 기능, , , 언어 기반의 통합적 개발환경인
GAMA Modeling Language(GAML) , GUI IDE, 2D/3D 기반의 시뮬레이션 시각화 도구 등을 제공
제 장 사물 사람 공간의 유기적 연결을
2
-
-위한 초연결 공간의 분산 지능 핵심원천 기
술 개발
사물 사람 공간의 유기적 연결을 위한 초연결 공간의 분산지능 핵심원천 기술은 지식- -을 공유하고 협업이 가능한 분산 지능사물 핵심 인프라 SW, 미션을 인지하고 자율적으로 분배 및 자가조직하는 미션 프레임워크 SW , 대규모 사물 사람 공간 초연결 지능공간 - -지능 응용 개발 기술을 제공하며 다음의 기본 기능을 포함한다 Simulated Reality , . ○ 지능사물 에이전트 핵심기술 및 분산협업 기술개발 - 경량 지능사물을 위한 인지 추론 의사결정 기술 개발, , - 피드백 기반 경량형 지능사물 강화 학습 기술개발 - 서비스 도메인 지능 정보모델 명세 배포 기술 개발, - 분산 지능사물 간 협업을 위한 지식 분할 공유 병합 기술 개발, , - 협업 지능사물 에이전트 검증을 위한 프로토타입구현 ○ 지능사물 분산협업 기술 고도화 및 분산지능진화 기술 개발 - 추상 자원명세 및 최적 자원 지능 매칭 기술 개발 -- 자원적응적 인지 추론 학습 판단 지능요소 조합 기술 개발, , , - 지능 별 학습모델 개발 및 분할 병합 기술 개발, - 자원적응형 인지 학습 프로파일링 및 프로파일 배포 기술 개발, - 임무기반 분산 협업 모니터링 및 학습데이터변환 기술 개발- 진화 분산지능 프로토타입 개발 ○ 미션기반 분산지능 핵심기술 및 지능사물 조직화기술 개발 - 사물 사람 공간 관계 분석을 통한 분산지능 요구사항 및 기능 정의- -- 분산지능 조직화를 위한 미션 정보 모델 개발 - 미션 수행을 위한 태스크 정보 모델 개발 - 지능사물 협업을 위한 에이전시 구성기술 개발 - 미션수행을 위한 에이전시 기반 태스크 분해및 할당 기술 개발 - 미션 수행 결과 분석 및 피드백 기술 개발 - 자원 및 제약 상황을 고려한 조정자 지능사물에이전트 기술 개발 - 동적 조직화를 위한 분산 지능사물 탐색 기술개발 - 다중 미션 수행을 위한 지능사물 간 협업기술 개발 ○ 상황적응형 미션 자율 인지 및 자율 조직화기술 개발 - 환경 및 상황 변화에 적응 가능한 분산지능재계획 기술 개발 - 자율조직 구성 지식베이스 구축 및 검색 기술개발 - 상황적응형 미션 자율 인지 기술 개발 - 동적 미션 수행을 위한 합의 기술 개발 - 자율조직 재구성 및 재계획 최적화 기술 개발 - 자율조직 기반 분산지능 기술 통합 검증 및보완
○ 현실공간과 초연결 공간간 정밀 정합 지능 응용 요소기술 개발 - 사물지능 분산 협업을 위한 시뮬레이션 요소기술및 구조 설계 - 온디맨드 이종 제품의 효율적 생산 미션 수행을위한 동적 작업 스케쥴링 요소 기술 설 계 및 의사결정 방식 모델링 - 재난안전 초연결 공간 구성을 위한 인지증강요소 기술 및 미션 대응 지식 저작 기술 개/ 발 - 사물 사람 공간의 분산 지능 운용 환경을 위한 통합 프레임워크 및 인터페이스 기능 - -정의 - 가상공간기반 지능적 협업 트레이닝 및 시뮬레이션기술 개발 - 분산지능사물기반 생산 미션 수행을 위한 동적 작업계획 및 할당 기술 개발 - 재난안전 분산 지능사물의 미션 협업 대응 지식화 참조 모델 개발/ / - 지능사물의 실행환경 및 통합 운용을 위한기능 및 구조 설계 - 현실공간과 초연결 공간간 복잡계 지능 협업에이전트 V&V 기술 개발 - 제조 현장내 분산 지능 사물의 생산 미션수행 협업 참조 모델 및 제조상황 시뮬레이션 / -연계 시범 지능 응용 구성 - 재난안전 분산 지능사물의 재난상황 시뮬레이션 연계 시범 지능 응용 구성 -- 분산 지능 에이전트 운용 프레임워크를 위한모니터링 도구 개발 ○ 현실공간과 초연결 공간간 정밀 정합 지능 응용 통합 시스템 개발 및 시험 - 분산 사물협업 지능 및 자율조직화 지원 시뮬레이션아키텍쳐 개발 - 유연제조 워크플로우 프로세스 지식베이스 구축 및 분산 사물지능 핵심기술연동 시스템 / 개발 - 재난안전 현장 시뮬레이션 (FDS) 연계 지식저작 및 이를 활용한 분산 사물지능 핵심기 술 검증
- 지능 응용 통합 운용 시험 환경 개발 - 복잡환경에서 사물협업 및 자율구성을 위한 지능형 V&V 시뮬레이션 기술 개발 - 분산지능사물기반자율공정설계 지원 제조지능 응용 프로토타입 구축 및 기술 검증 - 재난안전 빅데이터 사고조사 ( DB/이력 기반 학습을 통한 복잡 미션 자율해결형) ( ) 동적 자가조직화 핵심기술 검증 - 대규모분산 지능 에이전트 운용 프레임워크를 위한 다차원 모니터링 도구 개발 - 현실공간과초연결 공간간 정밀 정합 지원 V&V 시뮬레이션 시스템 통합 검증 - 생산 미션 수행 제조지능 응용 자가진화 의사결정기술 최적화 기술 개발 / - 재난안전초연결 공간 지능 응용를 통한 사물지능 자가조직 자율적응 기술 통합 검증/ / - 지능 응용기반 분산 지능 에이전트 운용 통합 시스템 통합 검증
제 절 연구개발 추진 체계
1
(그림 5) 추진체계도 ○ 본 과제는ETRI에서 자체적으로 기획하여 미래에 필요한 도전적 핵심기술 개발을 목표로 하는 주요사업으로서,ETRI 내부의 역량 활용을 원칙으로 함 - 단 사업의 평가와 자문 선행적으로 유관 기술을 보유한 대학 및 전문가 그룹의 자문과 , , 검토를 수시로 받으면서 스스로의 생각에 대한 매몰의 오류 없이 과제 수행 추진 - 또한 핵심 기술개발 이외의 일부 단편적 개발 작업 , – 즉 전시회를 포함한 시연목적의 단편적 소프트웨어 사용자 인터페이스 시작품 등은 외주 용역 활용, , ○ 본 과제에서 목표로 하고 있는 분산지능 기술은응용 도메인과 하부 공통 기술에 대한 구 분 표준화 요소에 대한 구체성이 모호한 분야이므로 과제 수행과정에서 이 부분에 대, , 한 연구 목표와 내용 구체화 - 특히 개발된 기술의 개념 검증 지능 응용 를 위해서 제조와 재난안전분야를 선정하고 , ( ) 구체적인 기술검증 지능 응용 시나리오를 차년도에 추진하여 자문위원회를 통해서 검1 증 - 또한 과제 초기에 개발기술의 수요기업을 섭외하여 현장의 복잡계 문제를 도출하고 기, , 술 적용 지능 응용 도출에 활용할 예정이며 지속적인 관계를 통해 기술의 현장 적용 , 유도 ○ 본 과제는 년 단위의 단계 추진 전략을 가지고 있음3 2 - 단계가 시작되면 가장 먼저 과제의 목표와 요구사항을 지능 응용 도출과 함께 명확히 1 정의하는 시간을 가질 예정이며, 1단계 종료시점에는 인간의 개입이 최소화된 자율 분 산지능 시스템을 통한 기술 검증을 시도할 계획임 - 단계에는 단계 기술을 고도화 하여 미국2 1 , NIST에서 정의한 무인시스템의 자율도 레벨 수준 즉 인간의 개입 없이 동작하는 자율 시스템을 통해 기술을 검증 8 , ○ 기존 주요사업에서 수행하고 있던 재난안전 헬멧 과제는 그 결과물을 활용하는지능 응용( ) 를 구축하고, 1단계부터 부분적으로 완료되는 분산지능의 핵심기술 검증에 우선적으로 적용하도록 추진 - 또한 복잡계 시스템이며 멀티에이전트 개념을 활용한 사례가 많은 제조분야는 개방형 , 스마트공장에서의 분산구조 적용과 지능 활용 시나리오를 개발하여 지능 응용화를 추 진 ○ 또한 제조 분야는 시장 수요 불확실성과 공급 네트워크의 확장 제품 모델 가변성 다품, , ,
종 생산의 유연성 등으로 인한 복잡계 시스템으로 분산지능의 단계적 적용을 통해 자율, 유연생산에서의 분산지능 유용성 검증 - 단계에는 생산 미션 수행을 위한 동적 작업계획 및 작업할당에 분산지능을 활용한 시1 나리오를 개발하여 시범 지능 응용를 구축 - 단계에는 생산 미션별 자율공정설계에 분산 지능을 적용함으로써2 , 티칭이 필요없는 제조지능 응용 검증 ‘teaching-less factory’ ○ 사물 사람 공간의 물리 시스템에 대한 디지털 공간 시뮬레이션 기술 개발 및 지능적 사- -물 간 분산 지능 환경 구축 기술력과 관련 인프라를 보유하고 있는 기업 및 기초 원천 에 대한 심화 기술을 보유한 대학이 유기적으로 연계된 연구개발 체계 구성
제 절 기술개발 추진 일정
2
번 호 연구내용 추진일정(12개월) 달성도 (%) 1 2 3 4 5 6 7 8 9 10 11 12 1 협업지능 사물 핵심 기술 개발 100% - 사물지능 시스템 구조 설계 - 지능 정보모델 정의 - 지능 정보 모델 공유 기술 개발 2 협업지능 사물 시스템 상세 설계 및 구현 100% - 지능사물 에이전트 시스템 프레임 워크 구현 - 상황 추론 액션 모니터링 및 피드- -백 기반 에이전트 협업 매커니즘 기능 검증 3 협업 플래닝 핵심 기술 개발 100% - 협업 플래닝 모듈 구조 설계 - 멀티 에이전트 환경 동적 미션 관 리 시스템 설계 당초계획 개발내용4 협업 플래닝 상황인지 시스템 개발 100% - 분사지능 조직화를 위한 미션 모델 작성 - 미션 수행을 위한 태스크 정보 모 델 작성 5 협업 학습 핵심 기술 개발 100% - 협업 학습 시뮬레이션 시스템 구조 설계 - 시뮬레이션 기반 협업 강화학습 프 레임워크 설계 6 협업 학습 시스템 개발 100% - 협업 학습 시뮬레이션 프레임워크 설계 - 협업 학습 프레임워크 프로토타입 구현 7 응용 지능 시스템 구조 설계 및 구현 100% - 재난안전 구조 설계 - 스마트 제조 구조 설계 8 재난 안전 지능 시스템 개발 100% - 인지증강 핵심 요소기술 SW 설계 - IoT 기반 구조안전 장비 시작품 구 현 9 제조 지능 시스템 설계 및 구현 100% - 제조 분산 지능 응용 시나리오 - 생산 미션 수행 환경 설계 - 분산 지능 제조 시작품 구현