시설 농업 무인 관리를 위한 식물 생산 로봇 개발
Development of Agriculture Robot for Unmanned Management in Controlled Agriculture
김 경 철, 유 범 상*
(Kyoung-Chul Kim
1and Beom-Sahng Ryuh
1)
1Chonbuk National University
Abstract: Environmental change, labor shortage, and international trade politics make agricultural automation ever more important.
The automation demands the highest technology due to the nature of agriculture. In this paper, autonomous pesticide spray robot system has been developed for rose farming in the glass house. We developed drive platform, navigation/localization system, atomization spray system, autonomous, remote, and manual operation system, and monitoring system. The robot will be a great contribution to automation of hazardous labor-demanding chore of pesticide control in glass houses.
Keywords: agricultural robot, agricultural automation, robot navigation/localization, spray system
기호설명
p pressure
=(kgf/cm)
γ =specific weight v velocity = (m/s) h height
=(m)
density
ρ =
(kg/m
3) Q
=discha rge (m
3/s)
D = Diameter (m)I. 서론
식물 생산산업은 산업원료, 식품 등 자연자원을 생산하는 기초 산업으로 기후나 주위 환경에 쉽게 영향을 받는 분야이 다. 세계적으로 농업 인구의 감소 및 농업 지능화에 따른 식 량안보, 자연 자원의 지속적 확보를 위한 농업의 생산성을 획기적으로 향상 시킬 수 있는 대책이 요구 된다. 농업 환경 의 변화는 단순한 양적 변화가 아닌 질적인 변화를 요구 하 고 있으며, 장기적으로 미래 농업을 대비한 로봇 기술이 요 구된다.
현재 개발된 농업용 로봇을 살펴보면 크게 다음과 같다.
로봇이 운영되는 환경에 따라 노지와 시설로 구분 되며, 로 봇의 운영 목적에 따라 과수 수확, 방제, 생육 환경 감시를 위한 로봇으로 구분할 수 있다. 농업용 로봇의 기술 동향을 살펴보면 그림 1과 같다. 네덜란드에서 개발된 오이 수확용 로봇과 오이 잎 솎음 로봇이 있으며, 일본에서 개발된 딸기 수확, 토마토 수확, 오이 수확 작업 로봇 등이 있다.
시설 농업용 로봇은 기술적인 문제에 의해서 실용화 되어 사용되고 있는 경우가 극히 적으나, 최근 농업환경의 변화에 따라서 필요성이 높아져가고 있어 현재는 다양한 연구가 진 행되고 있다. 본 연구진에 의해 개발된 시설 농업용 로봇은 그림 2와 같이 파프리카 유리 온실 방제 로봇, 유리 온실 다 목적 구동 플랫폼, 장미 농장 반자동 방제 로봇이다[1].
농업용 로봇 기술 상태는 초보적인 연구 개발 단계에 머물 러 있으며, 농업 환경에서 대상에 따른 로봇의 재배치, 재배 열의 어려움과 주행 노면의 불규칙한 특징으로 이동 기술 구 현의 어려움이 있다[1,2]. 특히 농약 방제는 심한 독성과 노 동력 부족으로 인해, 기피작업으로 구분되고 있다. 따라서 장 미화훼 시설농장의 로봇 자동화는 경제적 효과가 크다고 기 대되고 있다[2]. 장미화훼 재배에 있어서 가장 난해한 부분은 해충 방제로서, 잎 뒷면에 붙은 응애의 해충을 방제하는 것
Copyright© ICROS 2011
* 책임저자(Corresponding Author)
논문접수: 2011. 2. 20., 수정: 2011. 3. 10., 채택확정: 2011. 3. 29.
김경철: 전북대학교 대학원 정밀기계공학과([email protected]) 유범상: 전북대학교 기계시스템 공학부&전북대학교 지능로봇연구소 ([email protected])
그림 1. 국외 농업용 로봇 사례.
Fig. 1. Examples of agricultural robots overseas.
그림 2. 본 연구진에 의해 개발된 농업용 로봇.
Fig. 2. Agricultural robots developed by the authors.
이다. 현재는 인력에 의한 세세한 분무 작업이 수행되고 있 다[2]. 또한 일반 농약, 살충제 방제와 미스트 방제시 방제 기 구를 교체하여야 하는 불편함과 방제 기구 구입에 따른 비용 적인 문제를 갖고 있다. 본 논문에서는 자율 주행이 가능한 로봇을 통하여 해충에 가까운 위치에서 최적의 방제를 구현 할 수 있으며, 시설 관리가 가능한 식물 생산 로봇 개발에 대하여 발표하고자 한다.
II. 로봇 운영 환경 및 운영시스템
본 시스템이 사용될 농장에 대한 분석을 실시하였다. 그림 3 과 같이 규격화 되어져 있으며, 로봇의 주행 환경을 살펴보 면 크게 일반 콘크리트 바닥과 농작물 사이에 온수 파이프로 사용되어지는 레일로 구분되어 진다.
본 연구에서 개발된 로봇은 그림 4와 같다. 자율 주행을 위해 2대의 CCD-Camera, DMC (Digital Magnetic Compass), RFID, 초음파 센서, 근접센서 등을 사용하였으며, 두가지 노 면 조건에 대해서 적용이 가능하도록 콘크리트 평지를 구동 하는 무한궤도 주행과 좌/우 측 장미 사이를 운행하는 레일 주행 구동 방식을 적용하였다.
로봇의 운영 방법은 자동모드, 원격모드, 수동모드로 구분 하였다. 자동모드는 관리자가 로봇의 이동 경로와 방제 유무 를 체크하면 로봇이 자율 이동하며 방제 및 모니터링을 실시 하게 된다. 원격모드는 웹 카메라에서 얻어지는 영상 정보를 통하여 관리자가 원격으로 로봇을 이동하며, 원하는 구간에 대한 일부 방제 및 모니터링이 가능하다. 마지막으로 수동모 드는 로봇에 부착되어 있는 유선 단말기를 이용하여 작업자
가 직접 로봇을 이동 할 수 있다.
본 연구에서 개발 되어진 로봇은 그림 5와 같은 경로를 따 라 이동하게 된다.
원활한 방제 및 모니터링을 위해 복도와 레일 부분에는 고유의 위치 정보를 가지고 있는 RFID Tag를 설치 하였으며, 방제 및 모니터링이 필요한 위치 값을 입력하면 경로상의 RFID Tag 를 찾아 이동하게 된다. 로봇의 이동 방향에 대한 정보를 얻기 위해서 DMC (Digital Magnetic Compass)를 로봇에 장착하였으며, 전방과 중앙에 CCD-Camera를 통하여 복도와 레일 진입부의 Marking Tape을 감지 하여 구동 한다.
III. 로봇 주행 시스템
주행노면의 요철과 낙엽과 같은 장애물을 극복하기 위해 서 무한 궤도를 사용하였다. 그림 6과 같이 시설 농장의 규 격과 레일 주행을 고려하여 무한 궤도를 설계 하였으며, 장 미 농장의 협소한 통로를 고려하여 무한궤도는 레일 구동 바 퀴 보다 안쪽에 장착 하였다. 무한궤도에 사용된 모터는 로 봇의 무게 50kg을 고려 하여 Maxon Motor 社의 150W EC Motor 를 사용하였으며, 감속비는 1/25로 선정 하였다.
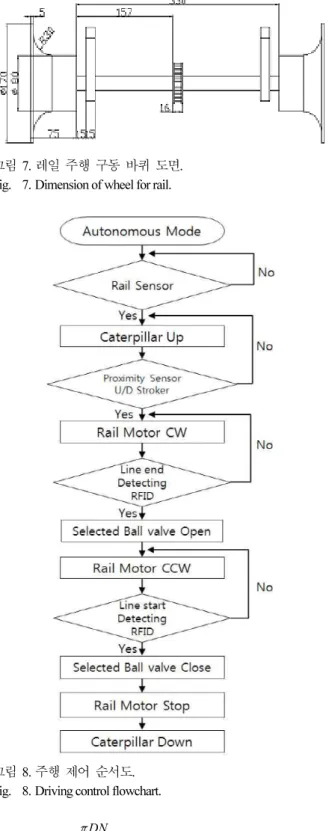
농작물과의 간섭을 최소화 하기 위해 CATIA V5를 이용하 여 실제 장미 농장의 환경을 모델링 하여 간섭 체크를 실시 하고 이를 설계에 반영하였다. 레일 구동 바퀴는 레일과의 접지력을 높여 이동하기 위해 그림 7과 같이 곡면을 가진 바 퀴를 제작 하였다. 최고 주행 속도를 1.8 m/s로 하였으며, 이 를 통하여 바퀴의 직경, D를 구하였다.
그림 6. 무한 궤도 설계도면.
Fig. 6. Dimension of endless track.
그림 3. 장미 농장의 주행 환경.
Fig. 3. Inside the glass house for rose.
그림 4. 개발된 로봇의 구조.
Fig. 4. Structure of developed robot.
그림 5. 온실에서의 로봇의 이동경로.
Fig. 5. Path of the robot in the glass house.
그림 7. 레일 주행 구동 바퀴 도면.
Fig. 7. Dimension of wheel for rail.
그림 8. 주행 제어 순서도.
Fig. 8. Driving control flowchart.
0.08 800 60
V =
πDN D = N = rpm (1)
로봇의 주행 제어는 통합 제어 모듈을 통하여 각 모터 드 라이브에 주행에 대한 신호를 주며 신호를 받은 모터 드라이 브가 모터를 제어하는 방식을 사용하였다. 그림 8은 주행제 어 순서도이다.
작업자가 경로를 지정하면, 복도를 주행하던 로봇은 방제 구역에 도달하게 되고, 레일 구간을 나타내는 빨간색 라인을 식별하여 방제 구역으로 향하게 된다. 방제 구역의 입구에 도착하면 로봇의 전방에 설치된 근접 센서가 레일을 감지 하
고, 로봇은 무한궤도 구동을 멈추고 로봇의 중앙에 설치된 Up/Down stroker 가 작동하여 무한궤도를 레일 바퀴의 중심으 로 승강 시킨다. 승강이 끝나면 레일 구동용 모터가 정회전 하며, 레일 끝부분에 도달하면 로봇은 역방향으로 구동과 동 시에 방제 노즐이 개방되어 방제 작업을 실시한다. 이때 방 제 구역은 로봇 하단에 설치된 RFID 안테나와 레일에 일정 한 간격으로 설치된 RFID Tag를 인지하여 방제 영역을 확인 할 수 있다.
IV. 로봇 Localization/Navigation
화훼 시설용 관리 로봇의 주된 임무는 방제이기 때문에 로 봇이 방제 시에도 충분히 원하는 방향으로 정확한 경로를 따 라 움직일 수 있도록 하여야 하며, 부가적으로 장애물 감지 시나 주어진 경로의 이탈 시를 충분히 대비한 알고리즘을 구 성 하였다. Navigation과 Localization을 위해 각각의 시스템들 이 어떤 방식으로 작동하고 있는지 살펴보도록 하겠다.
로봇의 위치 인식을 위한 DMC (Digital Magnetic Compass)와 RFID (Radio Frequency Identification) 를 사용 하였으며, 레일에 대한 인식을 위해 근접센서를 사용하였다.
로봇은 어떤 장소로 이동하기 위해서는 그곳을 찾아가는 기준이 필요하다. 그렇기 때문에 본 논문에서는 자기장을 세 밀하게 검출하는 DMC를 사용하여 로봇의 이동 방향에 대한 정보를 얻을 수 있게 하였다. DMC는 지구의 자기장 외에 주 위의 자기장의 영향을 받기 때문에 여러 간섭들에 의해서 정 북(True North)과는 조금 달라질 수 있다.
RFID 는 라디오 주파수를 이용하여 움직이는 물체와 인식 기 간의 데이터 통신을 하는 기술이다. 집적회로 메모리를 사용하기 때문에 물체를 통과해서도 정보를 수신할 수 있다.
또한 RFID Tag의 변경 및 추가가 자유롭고 반영구적인 장점 이 있다. 본연구진이 개발한 로봇에서는 이러한 RFID 기술 을 통하여 로봇이 현재 어느 위치를 지나고 있고 어느 위치 를 향해서 가고 있는지를 판단할 수 있게 하였다. 천장의 Land Mark 를 인식하는 방법을 적용하려 했으나 시설농장의 높이가 너무 높고 직접적인 직사광선을 받는다는 점과, 방제 시의 환경을 고려하였을 때, 데이터 저장 및 송수신이 자유 로운 RFID를 바닥에 부착하여 사용하는 것이 효율적이라 판 단하였다. 각각의 RFID Tag에 고유의 위치정보 값을 저장하 고 로봇의 주행 시 항상 RFID를 감지하여 로봇의 위치를 확 인 할 수 있다.
로봇의 자율 주행을 위해서 두 대의 CCD Camera를 사용하 였으며, 로봇 주행 시 장애물에 대한 회피를 위해 4개의 초 음파 센서를 사용 하였다. 두 대의 CCD Camera를 통해 얻은 정보를 기반으로 그림 9와 같이 로봇 주행 시 발생할 수 있 는 경우에 대해서 고려해 보았다.
주행 바닥면을 인지하기 위해 콘크리트 바닥면은 파란색,
레일 진입부는 빨간색으로 마크 하였으며, HIS 칼라 모델 기
법[색상(Hue) 채도(Saturation) 명도(Intensity)]을 사용하여 색을
구분 하였다. 모서리 부분의 영상의 밝기가 급격한 변화를
검출하는 Edge Detection 방법을 이용하여 로봇이 라인을 따
라 주행 하도록 하였다. 그림 10에서 파란색, 빨간색의 정보
를 감지하여 각 라인의 양 끝과 라인의 중심을 LCD화면에
점으로 표시 된 것을 볼 수 있다.
(a) case 1 (b) case 2
(c) case 3 (d) case 4 그림 9. 로봇 주행 시 발생 가능 경우.
Fig. 9. Cases of robot moves along the path.
그림 10. 로봇에 부착된 CCD 카메라 실제 화면.
Fig. 10. Views from the CCD cameras attached to the robot.
전방 CCD Camera는 복도 주행을 담당하며, 라인의 중심의 점들이 LCD 화면에서의 중앙 부분으로 위치할 수 있도록 항시 궤도를 제어하여 직진성을 유지한다. 로봇 중앙의 CCD Camera 에 복도주행 라인과 레일주행을 위한 라인이 겹쳐지 는 경우가 인식되면 이는 로봇의 좌 우측에 레일이 있다는 것을 의미한다. 이때 로봇이 이동하고자 하는 레일로 접근하 기 위해 로봇이 이동하고자 하는 레일위치로 90° 회전하여 로봇의 주행 방향을 바꾸고, 레일 주행을 위한 적색 라인을 따라 레일로 진입할 수 있게 하였다.
V. 방제 시스템
방제 노즐을 선정하는데 있어 세가지 조건을 고려하였다.
첫 번째로 시설 농장에서의 방제량을 고려하였다. 18개의 베 드에 500ℓ를 사용하며, 이에 방제기의 주행 속도를 고려하 여 다음의 수식을 통하여 방제 노즐의 유량을 계산하였다.
작업 시간 1080 1.1 / ÷ m s = 981.8 16.36min s = 주행 거리 60 m × 18
회= 1080 m
필요 유량 500 16.3 30.5 / min ÷ =
l그림 11. 방제 노즐.
Fig. 11. Spray nozzle [Teejet Technology, 2007].
그림 12. 방제 노즐 위치.
Fig. 12. Arrangement of nozzles on the boom.
그림 13. 방제 시스템의 설계도.
Fig. 13. Design of spray system.
두 번째로 농약은 수용제와 수화제로 구분되는데, 수화제 의 경우 물에 잘 녹지 않아 노즐이 막히는 경우를 고려해야 한다. 마지막으로 단일유체 노즐에서 분무시 효율적인 해충 방제에 요구되는 미립화의 정도를 고려하였다. 그림 11은 이 러한 조건을 만족할 수 있는 Spray system社의 Teejet 노즐인 XRC8002-VS 와 TP8004EVS를 선정 하였다[6].
방제 붐대의 경우 방제 노즐의 유량을 고려하여 그림 12와 같이 각 붐대 마다 노즐의 개수를 달리하여 배치하였다.
유량 공급 붐대에서 두 개의 중앙 붐대와 두 개의 아랫 붐 대로 그림 13과 같이 연결되어 있다.
해충은 잎의 후면 부분에 붙기 때문에 방제 시 아래 부분 에서 상부를 향해 미스트 분무를 하여야 하며, 일반 분무는 중앙에 수직으로 위치하여 좌우 방향으로 분무가 가능하도 록 하며, 분무 높이, 방향이 조절 가능하도록 설계하였다.
붐대의 형상과 치수를 바탕으로 하여 분무기 펌프를 선정
하기 위해 Bernoulli 방정식을 적용하였다. 관의 지름이 일정
하고 비압축성 유체가 정상상태 유동을 유지하는 가정이 가
능하므로 연속 이론에 의하여 유체의 속도를 얻을 수 있으며
이를 식에 적용하여 압력의 차이를 구할 수 있다. 분무기에
유체가 유입하는 부분의 압력(P
1), 속도(V
1), 그리고 높이(h
1)
이라 하고 노즐의 압력(P
1), 속도(V
1) 그리고 높이(h
2) 를 통하
여 수식을 정리하였다[7].
2 2
1 2 2 1
1 2
2 , p p v v
h h
γg
− = − = (2)
1
3.236 /
2 pump nozzlepump nozzle
P P P gh
P P gh kgf cm
ρ ρ
∆ = − =
= + = (3)
실제로 유동하는 모든 유체는 난류유동에 의한 상호충돌 과 점성에 의한 마찰의 영향으로 손실수두(H
L) 가 크게 발생 한다. 또한 관의 방향 변환과 관 면적 변경에 따른 속도 감 소에 의한 손실이 발생하게 된다. Darcy-Weisbach의 관마찰 손실식도 적용하면, 전체 손실, P
Total을 구할 수 있다[7].
2 2
2
2 2
0.649 0.497 1.146 lv v
P g K
ρ λ dg ρ
∆ =
= + =
(4)
1 2
3.236 0.497 4.3828 /
2 TotalP P P
kgf cm
= ∆ + ∆
= + = (5)
VI. 성능 실험 및 고찰
로봇의 주행 성능을 확인하기 위해서 평균최고속도와 반 복 정밀도에 대한 성능 실험을 실시하였다.
최고 속도 실험은 그림 14와 같이 4m의 레일에서 최고속 도까지 가속을 하여 바퀴에 장착된 RPM센서를 통하여 바퀴 의 RPM을 측정하였다. 10회의 반복 실험을 통하여 표 1의 데이터 값을 얻었으며, 약 1.8m/s의 최종 목표값을 도출하였다.
반복 정밀도 실험은 그림 15와 같이 로봇이 자동으로 2.5m 를 이동하게 하여 고정된 출발점에서 2.5m 이동 후 정지하는 지점의 위치를 측정 하였다. 출발점에서 출발한 로봇이 정지
하는 지점과의 거리를 레이저 센서와 ncode社의 eDAQ장비 를 이용하여 측정 하였다. 20회의 반복실험을 통하여 표 2와 같이 결과 값을 얻었으며, 이는 평균 ±8mm의 값을 도출 하 였다.
이를 통해서 개발 하고자 하는 로봇 주행부의 목표 최고 속도를 달성 하였으며, 시속 6.5 km/h의 속도 이다. 이는 사람 이 걷는 속도 약 4km/h 보다 빠른 속도이다. 반복 정밀도 실 험을 통해서 로봇에 이동 명령을 지시 후 목표 위치점에 대 한 정밀도를 알 수 있었으며, 이는 RFID Tag의 크기(40mm
80 mm )
×
를 고려하였을 때 최대 오차가 8.1mm인 실험 결과 와 비교하면, 로봇이 인지 할 수 있는 충분한 오차 범위이다.
RFID 안테나와 DMC 경우 특성상 자기와 금속에 매우 민 감한 모습을 보였다. 본 연구에서 개발한 로봇은 협소한 공 간에서 자율 주행이 가능해야 하므로 좁은 공간에 많은 것들 이 장착 되어있기 때문에 RFID 안테나와 DMC의 위치 선정 이 중요하였다. 로봇의 RFID 송수신 상태를 점검하기 위해 최고 속도로 이동할 때 데이터의 송수신 유무를 확인 하였다.
실험은 4m의 레일에서 최고속도인 1.8m/s로 구동할 때 RFID Tag 를 1.5m간격으로 2개를 바닥에 부착하여 총 10번 반복 실 험 하였다. 그 결과 1번 데이터를 읽지 못하였으나 안테나와 가까이 위치한 재질을 스테인레스로 교체함으로써 10번 Test 모두 좋은 결과를 얻을 수 있었다
카메라에서 얻어지는 영상데이터 값의 전송 상태를 확인 하였다. 그림 16은 전방카메라의 데이터로서 파란색과 빨간 색의 채도와 명도값을 얻을 수 있으며, LCD 화면에서 라인 의 중간점을 나타내는 빨간, 하얀색의 점의 위치값이 실시간 으로 전달되는 것을 볼 수 있다. 데이터 전송 속도는 11,5200 bps 이다.
그림 14. 최고 속도 실험.
Fig. 14. Maximum speed test.
표 1. 최고 속도 결과값.
Table 1. Data from the maximum speed test.
No Maximum Speed (m/s)
1 1.909 2 1.904 3 1.914 4 1.902 5 1.917 6 1.904 7 1.920 8 1.910 9 1.923 10 1.913
그림 15. 반복 정밀도 실험.
Fig. 15. Repeatability test.
표 2. 반복 정밀도 결과값.
Table 2. Data from the repeatability test.
No Distance (mm) No Distance(mm)
1 -8.113 11 1.898
2 -0.631 12 2.405
3 2.437 13 0.152
4 -1.417 14 0.869
5 2.478 15 2.277
6 3.882 16 1.545
7 1.260 17 -3.376
8 -4.791 18 1.911
9 2.832 19 6.249
10 -2.019 20 -6.225
그림 16. 카메라의 영상 데이터 전송 결과 값.
Fig. 16. Data acquired from the vision camera.
표 3. 유량 측정 결과 값.
Table 3. Data of mass flow rate test.
XRC8002-VS TP8004EVS
bar Mass (Kg) Mass flow
Rate (kg/s) Mass (Kg) Mass flow Rate (kg/s) 1
0.460 0.007 1.015 0.016 0.450 0.007 0.950 0.015 0.460 0.007 0.980 0.016 2
0.640 0.010 1.360 0.022 0.660 0.011 1.360 0.022 0.650 0.010 1.370 0.022
3
0.810 0.013 1.595 0.026 0.775 0.012 1.630 0.027 0.790 0.013 1.640 0.027 0.790 0.013 1.640 0.027 4
0.910 0.015 1.860 0.031 0.915 0.015 1.860 0.031 0.915 0.015 1.895 0.031 5
1.000 0.016 2.065 0.034 0.995 0.016 2.065 0.034 1.015 0.016 2.070 0.034
그림 17. 노즐의 유량 결과 그래프.
Fig. 17. Flow rate data of nozzle.
본 시스템의 방제에 대한 성능 시험은 질량 유량(Mass Flow Rate) 과 분무 입자 크기에 대한 실험을 실시하였다. 유 량 측정 실험을 실시하였으며, 1분 단위로 1bar에서 5bar까지 각 3회씩 측정하였다. 표 3은 질량 유량 테스트 결과를 보여 주고 있다.
노즐 질량 유량은 그림 17과 같이 표현된다.
유량과 압력과의 관계를 실험 그래프와 비교해 보면 선형 적으로 잘 나타나는 것을 확인 할 수 있었다[7].
다음은 분무 입자 크기에 대한 실험으로 DANTEC社의 PDA (Particle Dynamics Analysis) 장비를 이용하여 측정 하였다.
PDA 장비는 광학적 기술을 이용하여 입자의 크기와 속도를 측정하는 장비 이며, 그림 18은 PDA 장비의 측정원리를 보 여 주고 있다[7].
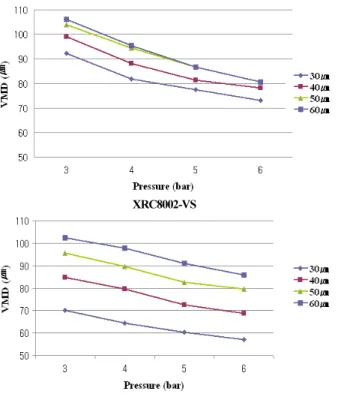
분무 입자 크기 테스트는 2bar에서 5bar 압력까지, 노즐 끝 과 측정기까지의 거리를 30cm에서 60cm까지 10cm 간격으로 하였다. 10,000개의 데이터를 측정하였으며, 측정 시간은 150s 로 하였다[8]. 그림 19, 20은 분무 입자 크기를 보여 주고 있다.
그림 18. PDA 장비의 측정 원리.
Fig. 18. Principle of PDA system [A.H. Lefebyre, 1989].
TP8004EVS
XRC8002-VS
그림 19. 거리에 따른 분무 액경 그래프.
Fig. 19. Spray particle size vs. distance.
XRC8002-VS