Journal of Institute of Control, Robotics and Systems (2014) 20(9):942-949
http://dx.doi.org/10.5302/J.ICROS.2014.14.0021 ISSN:1976-5622 eISSN:2233-4335
역진자형 전동 스쿠터의 조향 시스템
Steering System in a Self-Balancing Electric Scooter
최 용 준, 류 정 래*, 도 태 용
(Yong Joon Choi1, Jung Rae Ryoo1,*, and Tae-Yong Doh2)
1Department of Electrical and Information Engineering, Seoul National University of Science and Technology
2Department of Electronics and Control Engineering, Hanbat National University
Abstract: In this paper, a new steering system for a self-balancing electric scooter is proposed with an intuitive steering command input method, where the steering command is generated from the rider’s motion of shifting body to move the center of gravity toward the rotational direction. For the purpose, weight distributions on the rider’s feet are measured using force sensors placed beneath the rider’s feet, and the difference is applied to a steering control system. Stability of the steering system and resultant radius of gyration is investigated by modeling the steering system in consideration of the rider’s motion and centrifugal force. The proposed steering system is applied to experiments, and the results are presented to prove the validity of the proposed method.
Keywords: self-balancing electric scooter, steering control system, intention reading, center of gravity, centrifugal force
I. 서론
역진자형 전동 스쿠터(self-balancing electric scooter)는 제어 공학의 대표적 시스템인 역진자와 로봇 공학의 대표 시스템 인 이륜 이동 로봇을 접목한 획기적인 이동 수단으로서 상업 용 제품인 세그웨이(Segway) [1]의 등장을 시작으로 많은 연 구에서 다루어지고 있다. 역진자형 전동 스쿠터는 불안정한 시스템인 역진자의 균형 유지와 전후진 이동 및 회전 운동을 좌우 2개의 바퀴를 구동하여 제어한다. 상용화된 세그웨이 및 역진자형 전동 스쿠터 관련 기존 연구에서 균형 제어는 관성 센서를 활용한 제어기에서 담당하고 이동 속도는 운전 자의 전후 방향 몸 기울임에 의하여 조절되는데, 가감속에 따른 관성의 영향을 극복하기 위한 운전자의 동작을 전후 방 향 이동 명령으로 활용한 진관적인 명령 입력 방식이 역진자 형 전동 스쿠터를 다른 이동 수단과 차별화하는 대표적 특징 중 하나이다.
지금까지의 역진자형 전동 스쿠터와 관련된 연구에서는 주로 균형 제어와 전후진 이동 제어를 다루었으며, 조향 제 어에 관해서는 제어 구조[2,3] 이외의 조향 명령 입력 방법 등의 다양한 시도가 연구 결과로 발표되지는 않았다. 회전 운동을 위한 조향 제어에서는 대부분의 경우 이륜 이동 로봇 의 조향 제어 방식을 활용하는데, 직선 운동을 위한 두 바퀴 의 회전 속도에 이동 로봇의 회전 운동 성분을 좌우 두 바퀴 에 각각 더하거나 빼는 차동 구동 방식이 대표적이다. 한편, 운전자의 조향 명령 입력 방식으로는 상용 세그웨이에 사용 된 모터 사이클의 가속 손잡이 방식 또는 핸들 막대의 좌우
기울임 방식이 있으며[1], 그 외의 방법으로 핸들에 장착된 조절 노브(knob) [2]와 자동차 핸들[4]의 활용을 꼽을 수 있다.
별도의 손잡이 또는 페달의 조작 없이 관성을 극복하기 위한 몸의 앞/뒤 기울임만으로 가감속을 제어하는 명령 방식이 상 용 세그웨이를 혁신적인 이동수단으로 각광받게 하였듯이 조향 명령의 새로운 입력 방식에 관한 연구를 진행하여 운전 자의 조향 의도를 보다 편리하고 직관적으로 제어 시스템에 입력할 필요가 있다.
본 논문에서는 역진자형 전동 스쿠터의 새로운 조향 제어 시스템 및 조향 명령 입력 방식을 제안한다. 자동차나 자전 거가 이동 중에 회전하면 운전자는 몸을 회전 중심 방향으로 기울이는데, 이는 회전에 의하여 발생하는 원심력을 극복하 기 위하여 운전자가 자신의 무게 중심을 이동하는 자연스러 운 동작이며, 틸팅형 이륜 밸런싱 로봇에서도 조향 안정성을 위하여 같은 원리를 적용하였다[5]. 본 논문에서는 운전자의 좌우 체중 이동을 감지하여 역진자형 전동 스쿠터의 조향 제 어에 반영한다. 운전자는 회전하려는 방향의 다리를 구부려 체중을 회전 방향으로 이동시킴으로써 역진자형 전동 스쿠 터를 회전시킬 수 있다. 운전자 무게 중심의 위치를 감지하 는 방법으로는 운전자의 두 발에 나타나는 체중 분포를 각각 측정하고 그 차이를 조향 제어에 반영하는데, 역진자형 전동 스쿠터의 일반적인 제어 시스템에 운전자의 조향 명령을 반 영한 전체 제어 시스템의 구조를 제시한다.
한편, 제안된 조향 제어 시스템에서 운전자가 체중을 이동 시키면 역진자형 전동 스쿠터의 회전에 의해 원심력이 발생 하는데, 이 원심력은 다시 운전자의 체중 분포에 변화를 유 발하므로 제안된 조향 제어 시스템에서의 회전 반경은 운전 자 무게 중심의 위치뿐만 아니라 회전에 의한 원심력에도 영 향을 받는 피드백 시스템의 특성을 가진다. 운전자 체중 이 동에 의한 회전 반경과 조향 안정성을 확인하기 위하여 제안 된 조향 제어 시스템에 의한 회전 운동 상황에서의 역학 관 계를 바탕으로 전체 조향 시스템을 모델링하여 분석을 수행
Copyright© ICROS 2014
* Corresponding Author
Manuscript received March 20, 2014 / revised April 12, 2014 / accepted June 16, 2014
최용준, 류정래: 서울과학기술대학교 전기정보공학과 ([email protected]/[email protected])
도태용: 한밭대학교 전자·제어공학과([email protected])
※ 이 연구는 서울과학기술대학교 교내연구비의 지원으로 수행되었 음(2014-0330).
한다. 마지막으로 제안된 조향 제어 시스템을 역진자형 전동 스쿠터에 적용하고 그 결과를 확인함으로써 제안된 조향 시 스템의 타당성을 확인한다.
II. 역진자형 전동 스쿠터의 제어 1. 균형 유지 및 이동 제어
역진자형 전동 스쿠터는 전기 모터로 구동되는 2개의 바 퀴를 가진 이동 로봇의 일종이다. 구동 바퀴 외에 균형 유지 를 위한 보조 바퀴가 없는 관계로 일반적인 역진자 시스템처 럼 불안정하며, 이동에 앞서 균형을 유지하는 제어가 선행되 어야 한다[6,7]. 기울어진 각도를 측정하는 센서로는 자이로 센서(gyroscope)와 가속도 센서(accelerometer)를 주로 사용하 며, 두 센서의 단점을 보완하고 정확한 기울기 각도를 측정 하기 위하여 상보 필터(complementary filter) [8] 또는 칼만 필 터(Kalman filter) [9] 등의 센서 융합 방식을 적용한다.
역진자형 전동 스쿠터에서는 균형 제어와 더불어 이동 제 어가 필요하다. 일반적인 역진자 시스템과 달리 역진자형 전 동 스쿠터에서는 운전자가 몸을 앞이나 뒤로 기울임에 따라 기울기 각도가 수직에서 벗어나게 되고, 앞에서 설명한 균형 제어기에 의하여 기울어진 방향으로 이동하게 된다. 그림 1 에는 역진자형 전동 스쿠터의 균형 제어를 위한 제어 구조를 나타내었다[2].
2. 조향 제어
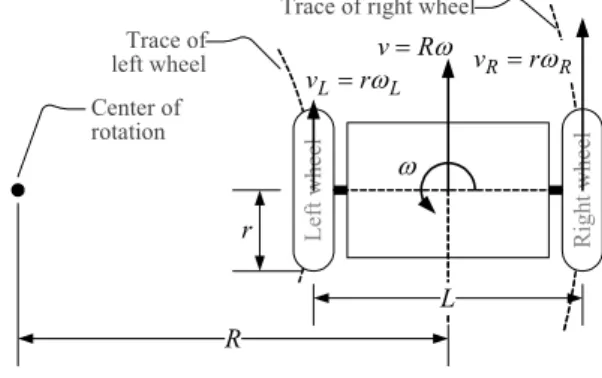
역진자형 전동 스쿠터는 역진자의 동역학적 특성과 이륜 이동 로봇의 기구학적 특성을 함께 가지고 있다[10]. 그림 2 에는 이륜 이동 로봇을 나타내었으며, 이동 속도 v 와 회전 각속도 w는 두 바퀴의 선속도 v 과 L v 로부터 다음 기구학R 식으로 결정된다[2]. 여기서 L 은 두 바퀴 사이의 길이이다.
Control input for balancing and moving
Control input for steering
Control input to left wheel
Control input to right wheel _
+
+ + 그림 3. 제어 입력 변환.
Fig. 3. Control input transformation.
1 1
2 2 2 2
1 1
L L
R R
r r v
v
v r r
L L L L
w w w
é ù é ù
ê úé ù ê úé ù
é ù=ê úê ú=ê úê ú
ê ú ê ú ê ú
ë û - ë û - ë û
ê ú ê ú
ë û ë û
(1)
이동 속도 v 와 회전 속도 w를 실현하기 위한 두 바퀴의 회전 각속도 wL과 wR은 다음과 같이 (1)의 역변환 관계로 구할 수 있는데, 직진을 위한 바퀴 각속도 성분 wM =v r에 조향을 위한 바퀴 각속도 성분 wS =Lw 2r을 더하거나 빼 는 형태로 나타난다. 여기서 r 은 바퀴의 반지름을 의미한다.
1 1 1 2
1 2
M S
L L
M S
R R
L
v v
v L
r r
w w
w
w w
w w
é ù
ê - ú é - ù
é ù é ù é ù
= = ê ú =ê ú
ê ú ê ú ê ú
ê ú ë û +
ë û ë û ë û
ê ú
ë û
(2)
기존 연구에서는 (2)의 관계에 대응하는 그림 3의 제어 입력 변환을 제어 구조에 적용하였다[2,3].
역진자형 전동 스쿠터가 이동 수단으로 활용되기 위해서 는 운전자의 명령을 제어 시스템에 반영하여야 한다. 다른 이동 수단과 비교할 때 역진자형 전동 스쿠터의 가장 차별화 된 특성은 운전자의 전후 방향 몸 기울임에 의하여 이동 속 도가 조절되는 점이다. 반면 상용 제품 또는 기존 연구에서 의 조향 명령은 손잡이 또는 핸들 막대, 조절 노브 등을 활 용하는데, 모두 운전자의 손을 활용한 인위적 조작이 필요하 다는 한계가 있다. 또한, 핸들 막대의 기울임을 조향 제어에 활용하는 경우에는 운전자가 의지할 고정 물체가 없는 상황 이므로 좌우 방향의 균형 유지에는 운전자의 두 발과 다리만 사용해야 하므로 안정감이 떨어진다.
이러한 기존 조향 명령 방식의 한계를 극복하고 가감속 제 어에 반영된 개선된 명령 방식을 조향 제어로도 확장하기 위 하여 본 논문에서는 운전자의 무게 중심 이동을 감지하여 조 향 제어에 반영하는 새로운 조향 명령 입력 방식을 제안한다.
제안하는 방식에서는 회전 상황에서의 좌우 흔들림을 고정 된 핸들 막대를 잡아서 보완할 수 있으므로 운전자에게 안정 감을 주는 장점이 있으며, 회전을 위한 무게 중심의 이동이 회전에 의해 발생하는 원심력을 극복하는 효과가 있다. 무엇 보다도 조향 제어를 위한 운전자의 직관적인 동작 이외의 인 위적인 조작이 필요하지 않은 장점이 있다.
III. 조향 명령 방식 및 조향 제어 시스템 1. 운전자 무게 중심 감지 및 조향 제어 반영
자전거나 자동차가 이동 중에 회전하면 운전자는 옆으로 쓰러지지 않기 위하여 회전하는 방향으로 몸을 기울인다. 이 Plant
Sensors _
Controller
Rider’s leaning force
Sensor Fusion Upright angle 0 deg. v
+ f
Moving velocity
Slant angle
그림 1. 역진자형 전동 스쿠터의 균형 제어.
Fig. 1. Balancing control in a self-balancing electric scooter.
Center of rotation
R
Right wheel
Left wheel
w r
Trace of left wheel
Trace of right wheel
L L r v = w
w R v =
R R r v = w
L
그림 2. 역진자형 전동 스쿠터의 기구학.
Fig. 2. Kinematics of a self-balancing electric scooter.
최 용 준, 류 정 래, 도 태 용 944
는 운전자 몸의 무게 중심을 회전 중심 방향으로 이동하여 원심력(centrifugal force)을 상쇄시키는 동작이다. 본 논문에서 는 이러한 운전자의 무게 중심 이동을 감지하여 조향 제어 명령으로 활용하는 조향 시스템을 제안한다.
운전자의 무게 중심 이동을 감지하는 방법으로는 운전자 의 두 발에 인가되는 체중 분포를 측정한다. 역진자형 전동 스쿠터는 운전자가 두 발로 서서 구동하는 이동 수단이므로 좌우 발판 각각에 체중을 감지하기 위한 센서로 그림 4와 같 이 FSR (Force Sensing Resistor) 센서 패널을 설치한다. FSR은 인가된 힘에 따라 저항 성분이 변하는 특성이 있는데, 힘 측 정에 보편적으로 사용되는 로드셀(load cell) 보다는 측정 가능 범위가 좁고 정밀도는 부족하지만 종이처럼 얇아서 역진자 형 전동 스쿠터에 적용하기에 매우 적합하다.
그림 5에는 역진자형 전동 스쿠터의 전체 제어 시스템 구 조를 나타내었다. 좌우 두 발에 가해지는 힘을 각각 f 과 L f 로 표시할 때, 조향 제어를 위한 제어 입력 R wS는 다음과 같이 결정된다. 여기서 K 는 조향 제어에 반영되는 감도를 S 의미한다.
( )
S KS fL fR
w = - (3)
(3)의 조향 제어 입력 wS와 균형 및 이동 제어 입력 wM에 대해서는 그림 3에서 설명한 제어 입력 변환기를 적용하여 구동 모터에 인가한다. 다만, 두 바퀴를 구동하는 모터의 동 특성 차이로 인한 직진 성능 저하를 보완하기 위하여 두 바 퀴에 속도 피드백 제어를 적용한 관계로 제어 입력 변환기의 출력은 각각 두 바퀴의 기준 회전 각속도(reference angular velocity) wLref와 wRref에 해당한다.
1 1 1 1
Lref M
Rref S
w w
w w
é ù é - ùé ù ê ú=ê úê ú ë û ë û ë û
(4)
2. 조향 안정성 및 회전 반경 분석
그림 5에서는 좌우 두 발에 가해지는 체중의 분포 f 과 L f 을 외부에서 인가되는 독립적인 입력으로 표현하였다. 하R
지만, 역진자형 전동 스쿠터에 탑승하여 같이 회전하는 운전 자의 체중 분포인 f 과 L f 은 운전자가 원심력을 극복하는 R 과정에서 변화하기 때문에 독립적인 외부 입력으로 볼 수 없
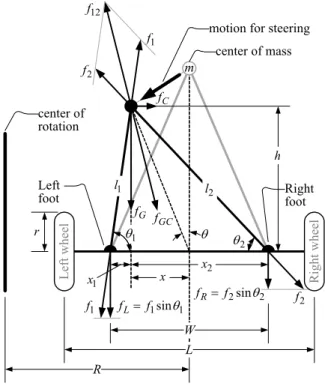
다. 그림 6에는 속도 v 로 이동하면서 회전 반경 R 로 회전 하는 역진자형 전동 스쿠터에서 힘의 평형 상태를 나타내었 다. 여기서 문제를 단순화하기 위하여 평탄한 노면에서의 주 행을 가정하였으며, 회전 방향이 급격히 변하는 상황을 배제 하여 제안하는 조향 시스템의 정상 상태에서의 특성을 모델 링하였다.
운전자 무게 중심은 질량 m 으로 나타내었으며, 회전 방 향의 다리를 구부려 무게 중심을 회전 방향으로 이동하였다.
여기서 무게 중심으로부터 좌우측 발까지의 길이는 각각 l1 과 l 로 표시하였다. 운전자의 무게 중심과 좌우 두 발이 구2 성하는 삼각형에서는 다음의 기하학적 관계에 의하여 q1과 q2가 결정된다. 여기서 W 는 두 발사이의 거리를 의미한다.
1 1 2 2
1 1 2 2
cos cos sin sin 0
l l W
l l
q q
q q
+ =
ì
í - =
î
(5) FSR Sensor
Panel
Self-balancing Electric Scooter Control Board
그림 4. FSR 센서를 장착한 역진자형 전동 스쿠터.
Fig. 4. Self-balancing electric scooter equipped with FSR sensors.
_
Kinematics
&
Dynamics
Sensors
_ Sensor
Fusion
v w wS
Controller
Wheel Vel. Ctrl.
Wheel Vel. Ctrl.
wL
wR
wLref
wRref
+ + + wM
KS
+
_ fL
fR
f
그림 5. 역진자형 전동 스쿠터의 제어 구조.
Fig. 5. Control structure of a self-balancing electric scooter.
x1
W
Left wheel Right wheel
m
L fC
fGC fG l1
l2 f1
f2 f12
f1 f2
q1
q2 r
R
center of mass
center of rotation
Left
foot Right
foot
x2
h
q
x
motion for steering
2 2sinq f fR=
1 1sinq f fL=
그림 6. 조향 제어에서의 힘의 평형.
Fig. 6. Force equilibrium in steering control.
Control &
Kinematics Force
Equilibrium
Centrifugal Force Eq.(5)
fC
Geometry R
l1 q1
q2
l2
Eq.(6) Eq.(7)
Eq.(8) rider
motion
fL
fR
그림 7. 제안된 조향 시스템의 피드백 구조.
Fig. 7. Feedback structure in the proposed steering system.
질량 m 에는 중력 f 와 회전에 의한 원심력 G f 가 인가C 되며, 이 두 힘의 합성인 fGC를 상쇄하는 방향으로 좌우 두 다리에 의하여 각각 f 과 1 f 가 인가되어 2 f 를 형성한다. 12 힘의 평형 상태에서는 다음의 관계가 성립하는데, g 는 중력 가속도를 의미한다.
1 1 2 2
2 2 1 1
sin sin cos cos
L R G
C
f f f f f mg
f f f
q q
q q
+ = + = =
ì
í - =
î
(6)
원심력 fC, 그리고 (5)에서 결정된 q1과 q2로부터 두 다 리에 가해지는 힘 f 과 1 f 가 (6)에 의하여 결정된다. 이렇게 2 결정된 f 과 1 f 의 수직 방향 성분인 2 f 과 L f 이 FSR 센서R 에 감지되어 조향 제어에 반영되는데, (2)와 (3)으로부터 다음 의 관계가 성립하여 회전 반경 R 이 결정된다.
( )
S S L R 2
K f f L v
w = - = r R (7)
마지막으로 원심력 f 는 회전 반경 R 로부터 다음과 같C 이 결정되며, 그 결과는 다시 (6)에 반영된다.
2 C
f mv
= R (8)
(5)에서 (8)까지의 수식은 입력과 출력이 피드백 시스템 형 태를 구성하는데, 그림 7에는 이 관계를 나타내었다. 음의 기 호가 명시되지는 않았지만 그림 7의 피드백 시스템은 네거 티브 피드백의 특성이 있다. (6)에서 f 가 증가하면 C f 과 L f 은 각각 감소 및 증가하고, 그 결과 (7)에서 R 은 증가하R
며, 마지막으로 f 는 (8)에 의하여 감소한다. 따라서, (5)에서 C (8)을 연립하면 다음과 같이 각각의 물리량이 수렴한다.
2 2 2
1 2
1
1
2 2 2
2 1
2
2
arccos 2 arccos
2
W l l
Wl
W l l
Wl q
q
ì æ + - ö
ï = ç ÷
ï è ø
í æ + - ö
ï = ç ÷
ï è ø
î
(9)
( )
( )
1
2 2
1 2
2
1 1
1 2
cos sin sin
sin( ) cos sin sin
sin( )
L C
R C
f mg f
f mg f
q q q
q q
q q q
q q
ì = -
ï +
ïí
ï = +
ï +
î
(10)
2
1 2
1 2 1 2
2 sin( )
sin( ) 4 sin sin
S C
S
gm vrK f L
mvrK L
q q
q q q q
-
=
+ +
(11)
1 2 1 2
1 2
sin( ) 4 sin sin
2 sin( )
S
S
mvrK R v L
gmrK L
q q q q
q q + +
=
-
(12)
여기서 (12)의 분자를 보면 두 번째 항이 첫 번째 항보다 충 분히 크기 때문에 다음과 같이 근사화할 수 있다.
2 2
1 2
1 2
2 sin sin
sin( ) tan
v v
R g g
q q
q q q
@ =
- (13)
(13)에서 보면 회전 반경 R 은 오로지 이동 속도 v 와 운 전자 무게 중심이 발판의 수직이등분선과 이루는 각도 q에 의하여 결정되는데, q 가 증가할수록 회전 반경은 줄어들며 수직에 가까울수록 회전 반경이 무한대로 증가하여 직진 운 동을 한다. 또한, 동일한 각도 q 에 대해서 이동 속도 v 가 증가함에 따라 회전 반경은 그 제곱에 비례하여 증가하는데, 이는 고속 주행에서의 급격한 방향 전환으로 인한 사고를 방 지하는 역할을 한다. 그리고, 회전 반경이 (3)에서 설정한 조 향 제어의 감도 K 에 무관하게 결정되는데, 이는 S K 가 그S 림 7의 피드백 시스템에서 루프 이득의 크기에 영향을 미치 는 제어 이득에 해당하기 때문이다. 본 논문에서는 그림 7의 시스템을 정적 시스템(static system)으로 가정하였으나 실제 시스템은 동적 시스템(dynamic system)인 관계로 K 를 과도S 하게 설정하면 실제 시스템은 불안정해질 수 있다. 아울러 제자리 회전하는 v =0인 경우에는 회전 각속도가 K 에 비S 례하므로 이 또한 K 의 과도한 설정을 제한한다. 마지막으S 로 지금까지의 결과에서는 운전자가 두 다리만 사용하는 경 우를 가정하였으나 실제로는 두 팔의 힘을 사용할 수 있으며, (11)의 원심력 중 일부를 팔의 힘으로 상쇄하면 회전 반경은 (13)보다 줄어들어 급격한 회전이 가능하다.
IV. 실험 및 결과 1. 전체 시스템 구조
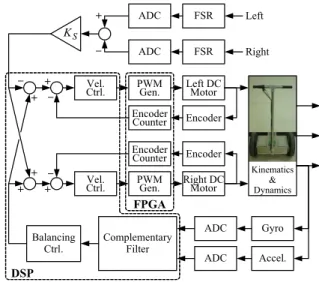
본 논문에서 제안한 조향 제어의 타당성을 확인하기 위하
Left DC Motor Encoder PWMGen.
Encoder Counter Ctrl.Vel.
Complementary Filter
Gyro
Accel.
Balancing Ctrl.
Encoder Encoder
Counter
Right DC Motor PWMGen.
Ctrl.Vel.
Kinematics
&
Dynamics
DSP
FPGA
ADC
ADC KS
+ _
FSR
ADC ADC
FSR Left
Right
_
_ +
+ +
+ + _
그림 8. 역진자형 전동 스쿠터의 시스템 구조.
Fig. 8. System structure of the self-balancing electric scooter.
최 용 준, 류 정 래, 도 태 용 946
여 실험을 수행하고 그 결과를 제시한다. 실험을 위하여 구 현된 역진자형 전동 스쿠터 제어 시스템의 전체 구조는 그림 8에 나타내었다. 제어기와 필터 등의 연산은 DSP에 펌웨어 (firmware)로 구현되었으며, 바퀴 구동을 위한 PWM 생성기 와 바퀴 회전 속도 감지를 위한 엔코더의 펄스 카운터는 FPGA로 구현하였다. 제어기의 샘플링 주파수는 1 kHz로 적 용하였다. 운전자의 무게중심 이동에 대하여 너무 민감하게 반응하지 않으면서 조향 제어 시스템의 안정성을 확보하기 위하여 조향 제어 이득은 K =S 7.2로 설정하였다. 실험에 사 용된 역진자형 전동 스쿠터의 두 바퀴간 거리 L 과 바퀴의 반지름 r 은 각각 0.6m와 0.19m이며, 실험에는 체중 80kg의 운전자가 참여하였다.
역진자형 전동 스쿠터의 기울기 측정을 위한 센서로 자이 로 센서와 가속도 센서를 사용하였고, 두 센서 신호는 상보 필터를 사용하여 융합하였다. 상보 필터의 기본 개념은 자이 로 센서 신호의 적분에서 발생하는 누적 오차와 가속도 센서 신호에 발생하는 고주파 노이즈 성분을 제거하기 위하여 그 림 9(a)와 같이 각각 동일한 차단 주파수의 고역 통과 필터와 저역 통과 필터 적용 후 더하는 것으로 (14)의 관계로 요약 된다. 여기서 qaccel, wgyro, qcomp, 그리고 wc는 각각 가속도 센서의 각도 신호와 자이로 센서의 각속도 신호, 상보 필터 의 기울기 각도, 그리고 필터의 차단 주파수를 의미한다.
gyro c accel gyro c
comp accel
c c c
s
s s s s
w w q w
q w q
w w w
= + = +
+ + + (14)
그림 9(b)에는 구현에 적합한 상보 필터의 구조를 나타내 었는데, 입력과 출력의 관계가 (14)와 일치하고 하나의 필터 로 상보 필터를 구현하는 장점이 있다[11]. 차단 주파수 wc 는 0.1 Hz에 해당하는 0.628 rad/s로 설정하였다.
Resistance (RFSR)
Force ( )fFSR
Conductance (GFSR)
Force ( )fFSR
(a) Resistance. (b) Conductance.
그림 10. FSR 센서 특성 곡선.
Fig. 10. FSR sensor characteristic curve.
운전자 무게 중심의 변화를 측정하기 위한 FSR 센서는 센 서에 가해지는 힘 또는 압력에 따라 저항 성분이 변화하는 특성이 있는데, 인가된 힘 fFSR과 센서 저항 RFSR의 관계는 그림 10(a)와 같이 반비례 특성이 있다[12]. 결국, 저항의 역 수인 컨덕턴스(conductance) GFSR은 그림 10(b)와 같이 센서 에 가해진 힘에 비례한 특성을 가지므로 GFSR을 측정하고 비례상수 KFSR을 활용하여 다음과 같이 환산한다.
FSR FSR FSR
f =K G (15)
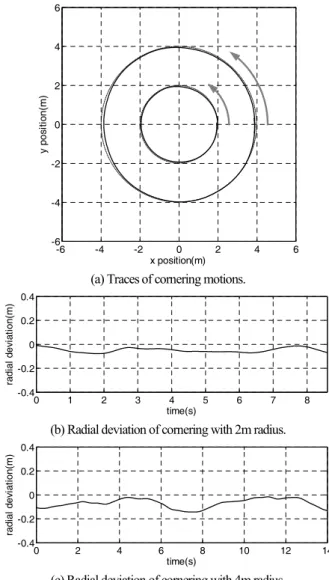
2. 원 궤적 선회 주행 실험
그림 11에는 고정 회전 반경의 원 궤적을 추종하는 선회 주행 실험 결과를 나타내었다. 운전자는 바닥에 표시된 반지 름 2m와 4m 원 궤적을 추종하도록 체중을 이동하여 반시계 방향으로 회전하였다. 그림 11(a)에는 엔코더로 측정한 두 바 퀴의 회전 속도 wL과 wR을 (1)의 기구학식에 적용하여 구 한 2차원 평면상의 궤적이 점선으로 표시한 2m와 4m 반경 의 원 궤적을 충실히 추종함을 나타내었다. 실험 결과의 분 석에 활용된 엔코더 정보 기반 위치 추정에서는 바퀴 미끄러 HPF
( )
LPF ( ) s
1 wgyro
accel
q
+ + wc
wc
qcomp s
1
_
+ +
+ wgyro
accel
q wc
qcomp
(a) Conceptual. (b) Implementation.
그림 9. 상보 필터.
Fig. 9. Complementary filter.
-6 -4 -2 0 2 4 6
-6 -4 -2 0 2 4 6
x position(m)
y position(m)
(a) Traces of cornering motions.
0 1 2 3 4 5 6 7 8
-0.4 -0.2 0 0.2 0.4
time(s)
radial deviation(m)
(b) Radial deviation of cornering with 2m radius.
0 2 4 6 8 10 12 14
-0.4 -0.2 0 0.2 0.4
time(s)
radial deviation(m)
(c) Radial deviation of cornering with 4m radius.
그림 11. 선회주행 궤적 및 위치 오차.
Fig. 11. Traces and radial deviations of cornering motions.
Yong Joon Choi, Jung Rae Ryoo, and Tae-Yong Doh
짐에 의한 오차의 누적 문제가 발생할 수 있으나 10초 내외 의 짧은 시간 동안의 누적 오차는 무시할 수 있다. 그림 11(b)와 (c)에 나타낸 반지름 방향 오차 성분을 바탕으로 추 종 정밀도를 확인해보면 반경 2m 원 궤적에서는 최대 7.8 cm, 4m 원 궤적에서는 14.3 cm 미만의 오차가 발생하였다.
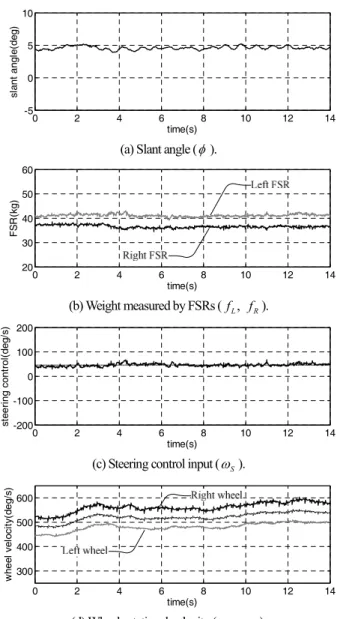
그림 11 실험에서의 세부 사항을 확인하기 위하여 그림 12와 13에는 각각 반경 2m와 4m 원 궤적 추종에서의 기울 기 각도 ,f FSR 센서에서 측정한 운전자 체중 분포 f 과 L
R,
f (3)에 의한 조향 제어 입력 wS, 그리고 엔코더로 측정 한 두 바퀴의 회전 속도 wL과 wR 등의 시간에 따른 변화 를 나타내었다. 반시계 방향 선회 주행은 좌회전에 해당하므 로 운전자는 체중을 좌측으로 이동하여 그림 12(b)와 13(b)에 서와 같이 fL> fR의 관계가 확인된다. 운전자는 원 궤적 추 종 상태를 확인하고 체중의 중심 위치를 조금씩 변화시켜 이 동 경로를 지속적으로 보정하는 관계로 FSR 센서 데이터가 조금씩 변화하는 것을 확인할 수 있다. 조향 제어 입력 wS
는 FSR 센서 데이터의 차이에 K 의 조향 제어 이득을 적용S 하여 그림 12(c)와 13(c)로 나타난다. 이 조향 제어 입력을 균 형 제어 입력과 조합하여 두 바퀴의 회전 속도 제어에 적용 한 결과 두 바퀴의 회전 속도 wL 과 wR는 그림 12(d)와 13(d)의 형태로 나타난다. 좌우 두 바퀴 회전 속도 중간에 표 시된 점선은 두 바퀴 회전 속도의 동상 성분으로 진선 운동 을 발생시키는 바퀴 회전 성분이다.
그림 12(c)와 13(c)에 점선으로 나타낸 wS의 평균값은 각 각 73.52 deg/s와 45.90 deg/s에 해당하는데, 이는 w=2rwS L 의 관계로부터 각각 46.56 deg/s와 29.07 deg/s의 회전 운동에 해당하는 조향 제어 입력이다. 이로부터 1회전에 소요되는 시간을 확인하면 각각 7.73초와 12.38초로 연산된다. 실제 1 회전에 소요된 시간을 확인하면 2m와 4m 원 궤적에서 각각 8.5초와 13.6초가 소요되어 이론적 분석보다 조금씩 시간이 더 소요되는데, 모터 속도 제어에서 발생하는 속도 오차 성 분을 주요 원인으로 꼽을 수 있다.
0 2 4 6 8 10 12 14
-5 0 5 10
time(s)
slant angle(deg)
(a) Slant angle (f).
0 2 4 6 8 10 12 14
20 30 40 50 60
time(s)
FSR(kg)
(b) Weight measured by FSRs (fL, f ). R
0 2 4 6 8 10 12 14
-200 -100 0 100 200
time(s)
steering control(deg/s)
(c) Steering control input (wS).
0 2 4 6 8 10 12 14
300 400 500 600
time(s)
wheel velocity(deg/s)
(d) Wheel rotational velocity (wL, wR).
그림 13. 회전반경 4m 선회주행.
Fig. 13. Cornering motion with rotational radius of 4m.
0 1 2 3 4 5 6 7 8
-5 0 5 10
time(s)
slant angle(deg)
(a) Slant angle (f ).
0 1 2 3 4 5 6 7 8
20 30 40 50 60
time(s)
FSR(kg)
(b) Weight measured by FSRs (fL, fR).
0 1 2 3 4 5 6 7 8
-200 -100 0 100 200
time(s)
steering control(deg/s)
(c) Steering control input (wS).
0 1 2 3 4 5 6 7 8
300 400 500 600
time(s)
wheel velocity(deg/s)
(d) Wheel rotational velocity (wL,wR).
그림 12. 회전반경 2m 선회주행.
Fig. 12. Cornering motion with rotational radius of 2m.
최 용 준, 류 정 래, 도 태 용 948
(a) Motion of obstacle avoidance.
-3 -2 -1 0 1 2 3
-1 0 1
x position(m)
y position(m)
(b) Position trajectory computed from wheel velocity.
그림 14. 장애물 회피 주행 궤적.
Fig. 14. Trace of obstacle avoidance.
3. 장애물 회피 주행 실험
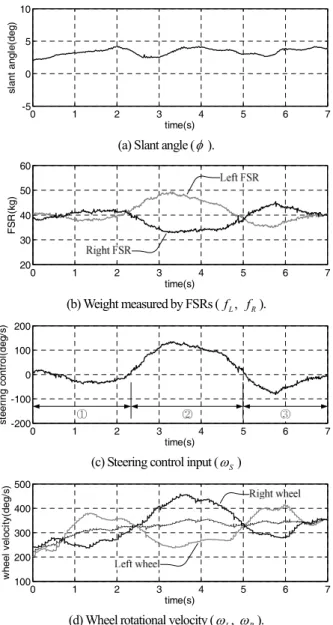
두 번째 실험 결과로 그림 14에는 장애물 회피를 위한 조 향 제어 동작을 나타내었다. 2m 간격으로 직선으로 배치된 3 개의 장애물을 피하여 S자로 주행하기 위해서 운전자는 체 중을 좌우로 이동한다. 그림 14(a)의 장애물 회피 주행을 했 을 때, 엔코더에서 측정된 두 바퀴의 회전 속도로부터 2차원 평면상의 이동 궤적을 표시하면 그림 14(b)와 같다.
그림 14의 장애물 회피 주행에서의 세부 사항을 확인하면 그림 15와 같다. 운전자는 그림 15(a)와 같이 전동 스쿠터를 서서히 가속시킨 후 3~5도 정도로 기울여 저속으로 구동하 면서 장애물을 회피하기 위하여 무게 중심을 좌우로 이동하 였다. 그림 15(b)와 같이 측정된 운전자의 체중 분포에 의해 조향 속도 성분 wS는 그림 15(c)와 같이 변화하고, 그 결과 두 바퀴의 회전 속도 wL과 wR은 그림 15(d)와 같다.
V. 결론
본 논문에서는 역진자형 전동 스쿠터의 조향 제어를 위한 새로운 조향 명령 입력 방법을 제안하였다. 운전자 양 발의 체중 분포를 측정하여 그 차이를 조향 제어 명령에 반영하는 관계로 운전자는 회전하려는 방향으로 무게 중심을 이동하 는 직관적인 동작 이외의 별도의 조작이 필요하지 않으며, 이 동작에 의하여 회전에 의한 원심력도 상쇄할 수 있다. 아 울러 제안한 방식에 의한 회전 운동 상황에서의 역학관계를 분석하여 조향 안정성과 회전 반경을 분석하였다. 마지막으 로 실제 역진자형 전동 스쿠터를 활용한 실험 결과를 제시함 으로써 제안한 조향 제어 방식의 타당성을 확인하였다. 본 논문에서는 문제를 단순화하는 차원에서 평탄 노면에서의 급격하지 않은 조향 조작을 가정하였으나 실제 주행 환경 및 시스템은 이와 다르다. 따라서, 조향 시스템의 동특성을 고려 한 비평탄 노면에서의 주행 안정성 확보에 관한 연구의 수행 이 필요하다.
0 1 2 3 4 5 6 7
-5 0 5 10
time(s)
slant angle(deg)
(a) Slant angle (f).
0 1 2 3 4 5 6 7
20 30 40 50 60
time(s)
FSR(kg)
(b) Weight measured by FSRs (fL, f ). R
0 1 2 3 4 5 6 7
-200 -100 0 100 200
time(s)
steering control(deg/s)
(c) Steering control input (wS)
0 1 2 3 4 5 6 7
100 200 300 400 500
time(s)
wheel velocity(deg/s)
(d) Wheel rotational velocity (wL, wR).
그림 15. 장애물 회피를 위한 조향 제어.
Fig. 15. Steering control for obstacle avoidance.
REFERENCES [1] http://www.segway.com, Jan. 2014.
[2] J.-M. Yun, J.-K. Lee, and J.-M. Lee, “An efficient horizontal maintenance technique for the mobile inverted pendulum,”
Journal of Control, Automation, and Systems Engineering (in Korean), vol. 13, no. 7, pp. 656-663, Jul. 2007.
[3] F. Grasser, A. D’Arrigo, S. Colombi, and A. C. Rufer, “JOE: A mobile, inverted pendulum,” IEEE Transactions on Industrial Electronics, vol. 49, no. 1, pp. 107-114, Feb. 2002.
[4] J. Yu, Y. Park, S. Kim, and S.J. Kwon, “Development of a omni- directional self-balancing robot wheelchair,” Journal of Korea Robotic Society (in Korean), vol. 8, no. 4, pp. 229-237, Dec.
2013.
[5] S. Kim, J. Seo, and S. J. Kwon, “Design of a two-wheeled balancing mobile platform with tilting motion,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 20, no. 1, pp. 87-93, Jan. 2014.
[6] T.-J. Ren, T.-C. Chen, and C.-J. Chen, “Motion control for a two-wheeled vehicle using a self-tuning PID controller,” Control
Engineering Practice, vol. 16, no. 3, pp. 365-375, Mar. 2008.
[7] H. W. Kim and S. Jung, “Experimental studies of controller design for a car-like balancing robot with a variable mass,”
Journal of the Korean Institute of Intelligent Systems (in Korean), vol. 20, no. 4, pp. 469-475, Aug. 2010.
[8] H. G. Min, J. H. Kim, J. H. Yoon, E. T. Jeung, and S.-H. Kwon,
“A control of balancing robot,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 16, no. 12, pp. 1201- 1207, Dec. 2010.
[9] H.-J. Lee and S. Jung, “Gyro sensor drift compensation by Kalman filter to control a mobile inverted pendulum robot system,” Proc. of the 2009 IEEE International Conference on Industrial Technology, Gippsland, Australia, pp. 1026-1031, Feb.
2009.
[10] C. S. Jeong, K. T. Park, and S. Y. Yang, “Technical trend of mobile robot according to kinematic classification,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 19, no. 11, pp. 1043-1047, Nov. 2013.
[11] T. Nakashima, M.-C. Chang, and S.-K. Hong, “Design and performance evaluation of a complementary filter for inverted pendulum control with inertial sensors,” Proc. of the 2004 Conference on Information and Control Systems (in Korean), Korea, pp. 544-546, Nov. 2004.
[12] T.-S. Lee, Y.-M. Kwon, and H.-G. Kim, “Smart location tracking system using FSR (Force Sensing Resistor),” Proc. of the 14th International Conference on Artificial Reality and Telexistence, Korea, Nov. 2004.
최 용 준
2012년 서울과학기술대학교 제어계측 공학과 졸업. 2012년 3월~현재 서울과학 기술대학교 일반대학원 제어계측공학 과 석사. 관심분야는 서보 제어, FPGA 를 활용한 디지털 제어 시스템, 영상 신호 인터페이스.
류 정 래
1996년 한국과학기술대학 전기 및 전자 공학과 졸업. 1998년 한국과학기술원 전 기 및 전자공학과 석사 및 2004년 박사.
2004년~2005년 9월 삼성전자 Sys. LSI 책임연구원. 2005년 10월~현재 국립서울 과학기술대학교 전기정보공학과 부교 수. 관심분야는 강인 동작 제어, 광디스크 드라이브 서보 제 어, DSP 기반 디지털 제어 시스템 설계.
도 태 용
1992년 경북대학교 전자공학과 졸업.
1994년 한국과학기술원 전기 및 전자공 학과 석사. 1999년 동 대학원 박사. 1997 년~2001년 삼성전자 디지털 미디어 연 구소 책임연구원. 2002년 3월~현재 국립 한밭대학교 전자제어공학과 교수. 관심 분야는 강인제어, 학습제어, 반복제어, 디지털 제어 시스템.