* 정회원 ․ 연세대학교 토목환경공학과 교수 (Corresponding Author ․ Yonsei university professor ․ [email protected])
** 학생회원 ․ 연세대학교 토목환경공학과 박사과정 ([email protected]) Received April 24 2012, Revised July 5 2012, Accepted October 23 2012
Copyright ⓒ 2013 by the Korean Society of Civil Engineers
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
DOI: http://dx.doi.org/10.12652/Ksce.2013.33.1.035 www.kscejournal.or.kr
모듈러 강교량 상부모듈 구성파트의 3차원 조립설계를 위한 파라메트릭 모델링 방법
이상호*ㆍ안현정**
Lee, Sang Ho*, An, Hyun Jung**
Parametric Modeling Method for 3D Assembly Design of Parts Composing Superstructure Module on Modular Steel Bridge
ABSTRACT : A parametric modeling method, one of the core technology of BIM (Building Information Modeling), is proposed for efficient 3D assembly design among components of a superstructure module of modular steel bridge. Assembly system is classified into 3 levels as LoD (Level of Details) for 3D assembly design of the parts. Components forming 3D shape of the parts are identified and defined as parameters, variables depending on parameters, or constants independent of the parameters. Then, spatial assembly rules among the parts are defined according to the assembly system. Positional relations among the identified shape components are defined for mating spatial position and geometrical relations are defined for constraining degree of freedom on X, Y, and Z axis. Finally, a standardized template is designed by applying the rules to 3D based assembly design for the parts of the superstructure module. In addition, applicability of the parametric modeling method is demonstrated by testing the shape variation of the superstructure module according to changing the defined parameters.
Key words : modular steel bridge, superstructure module, assembly design, BIM, parametric modeling
초 록 :
본 연구에서는 모듈러 강교량 상부모듈 구성파트의 효율적인3
차원 조립설계를 위하여BIM(Building Information Modeling)
의 핵심기술 요소인 파라메트릭 모델링 방법을 연구하였다
.
모듈러 강교량 상부모듈 구성파트의3
차원 조립설계를 위하여 모듈의 조립체계를 상세수준
(LoD: Level of Details) 3
단계로 정의하였다.
모듈을 구성하는 각 파트들의3
차원 형상구성을 위한 요소들을 추출하 여 매개변수,
매개변수에 따라 변하는 종속변수,
매개변수에 따라 변하지 않는 고정 값으로 구분하여 정의하였으며,
조립체계 단계에 따 라 파트간의 공간적 조립규칙을 정의하였다.
공간적 위치를 구속하기 위하여3
차원 형상구성 요소간의 위치관계를 정의하였으며, X, Y, Z
축에 대한 자유도를 구속하기 위하여 기하학적 관계를 정의하였다.
또한,
정의한 조립규칙을 적용하여 모듈러 강교량 상부모듈의3
차원 조립설계를 위한 표준템플릿을 구축하였으며
,
정의한 매개변수의 변화에 따른 강교량 상부모듈의 형상변화 검토를 통하여 파라메트릭 모델링 방법의 적용성을 검증하였다
.
검색어 :
모듈러 강교량,
상부모듈,
조립설계, BIM,
파라메트릭 모델링 Structural Engineering 구조공학1. 서 론
국토해양부에서는 건설기술혁신사업의 일환으로 2010년도 부터 5개년 동안 수행되는 ‘모듈러 교량 기술개발 및 실용화’
연구를 진행하고 있다. 모듈러 교량은 레고와 같이 사전에 제작 된 표준 부재들을 조립하여 전체 교량 시스템을 구성하는 기술로 모듈의 교체로 시스템에 부가적인 기능을 부여하거나 성능을 업그레이드할 수 있는 플러그인 기술을 말한다. RIST(포항산업 과학연구원)를 포함한 연구수행 그룹인 모듈러 교량 연구단 (RIST, 2010) 에서는 모듈러 교량 기술개발을 위하여 강교량 및 콘크리트 교량을 대상으로 표준화된 모듈을 개발하고 있으며, 정보기술을 활용하여 모듈의 파트 라이브러리 제작 및 웹(web) 기반 3차원 조립설계와 시공 시뮬레이션을 지원하기 위한 통합 정보시스템을 구축하는 연구를 진행하고 있다.
건설분야에서 3차원 기반의 구조물 설계가 활성화됨에 따라 기존의 2차원 기반에서는 쉽지 않았던 구조물 설계 시의 구성요 소들 간 간섭체크나 가상 시뮬레이션 등과 같은 시각적 효과 제공이 보다 용이해지고 있으며, 이를 통하여 설계오류를 줄이 고 시공성을 향상시켜 건설 프로젝트에서 많은 경제적 효과를 보고 있다. 구조분야의 이러한 사례로 Sacks(2004)는 프리캐스 트 콘크리트 구조물의 3D 모델링 적용을 통한 비용 감소, 공기 단축 및 에러 감소의 결과를 통해 경제적 효과를 입증하였다.
Lee et al.(2005)은 3D 솔리드 모델을 기반으로 강교량에 대한 정보를 효율적으로 제공하는 방안을 제시하였으며, Lee and Jeong(2006) 은 교량 구조물의 3차원 형상모델을 통한 구조설계 및 해석정보 통합프레임워크를 제안하여 업무효율을 꾀하였다.
Lee et al.(2008)은 교량의 표준화된 3차원 정보모델을 활용하 여 물량산출과 구조해석뿐 아니라 다양한 응용분야의 적용성을 검토하였으며, Kim et al.(2011)은 토목시설물을 대상으로 토 목공사의 종류별, 관리 분야별 3차원 기반의 BIM 활용방안을 제시하였으며 실제 프로젝트에 적용하여 그 효용성을 입증하였 다. 또한, Lee and Kim(2011)은 토목구조물인 교량, 터널, 도로를 대상으로 국제표준인 IFC 기반의 정보모델을 개발하여 표준정보모델 기반의 3차원 디지털 모델을 통한 도로구조물의 원활한 정보공유 방법을 제시하였다.
그러나, 구조물의 3차원 형상은 설계오류가 발생하거나 설계 변경 시 2차원 기반의 설계와 동일하게 3차원 모델을 재생성하 는 반복적인 작업수행이 요구되었으며, 이는 많은 시간과 노력 을 소비하게 만든다. 파라메트릭 모델링 방법은 이러한 문제점 을 해결하고 3차원 모델의 활용성을 극대화할 수 있다. 파라메트 릭 모델링 방법은 BIM의 핵심기술요소로 형상에 설계치수를 부여하거나 형상을 구성하는 변수들과 기하학적인 요소들 간의
관계를 정의하여 주요 값들의 변경으로 설계자가 원하는 형상으 로 자동 변경시켜 줌으로써 3차원 모델의 효율적인 형상설계와 수정을 가능하게 한다. 이러한 파라메트릭 모델링 기법은 초기 에는 2차원 기반의 설계에 적용되었으나 3차원 기반의 형상모델 개념이 도입됨에 따라, 제조업 및 건축분야 제품과 구조물의 파트들을 구성하는 조립설계 방법에 널리 적용되고 있다.
조립설계를 수행하기 위해서는 파트간의 위치관계와 자유도 의 정의가 필요하였으며, 이러한 개념은 파라메트릭 모델링에서 기하학적 요소간의 구속조건을 부여하는 것과 유사한 개념이라 고 할 수 있다. 조립설계를 위한 연구의 한 방향으로서 파트간 의 공간적 관계를 정의하기 위한 연구가 수행되었으며(Amber and Popplestone, 1975; Rossignac, 1987; Liu and Nnaji , 1991), 또 다른 측면에서는 파트간의 거동에 대한 관계규칙을 정의하는 연구가 수행되었다(Kikkawa et al., 1993; Kim et al., 2003). 이러한 방법론을 통하여 현재 많은 상용 소프트웨어 (SolidWorks, CATIA, Digital Project, ArchiCAD, Revit, etc.) 에서 파트간의 구속조건을 부여하여 조립체를 구성할 수 있는 기능을 지원하고 있다. 특히, Digital Project, ArchiCAD, Revit 은 건축분야에서 널리 사용되는 파트의 라이브러리(벽, 창문, 계단 등)와 파트들의 관계를 정의한 인터페이스를 제공하 고 있다. 다만, 현재까지는 토목구조물을 구성하는 파트를 지원 하는 소프트웨어는 없는 상태이며, 파라메트릭 모델링 방법을 토목구조물에 적용하기 위한 연구가 수행되고 있다. Weibing et al.(2008)은 교량의 T형 빔에 대한 파라메트릭 모델링 방법을 적용하기 위한 시도를 하였으며, Lee et al.(2010)은 FCM 교량을 대상으로 하여 교량의 길이에 따라 박스거더의 종방향 형상을 자동 조정하기 위한 연구를 수행하였다. Cho et al.
(2010) 은 PSC 박스거더의 반복적인 설계변경에 대한 신속한 설계의도를 반영하기 위하여 3차원 객체 모델기반의 파라메트 릭 모델링 개념을 시도하였으며, Hong et al.(2011)은 콘크리트 기둥에 철근을 자동으로 배근하기 위한 파라메트릭 기반 연구를 수행하였다. 교량의 형상을 구성할 때 적용할 수 있는 구속조건 정보를 중립데이터 포맷으로 표현하기 위한 연구도 수행되었으 며(Ji et al., 2011a; Ji et al., 2011b), Lee et al.(2012)은 콘크리트 박스교량의 정보모델을 구성할 때 사용되는 철근 각각의 형상을 정의하기 위하여 파라메트릭 모델링 방법을 적용한 바 있다. 그러나, 현장요건이나 구조적인 문제에 따라 다양한 형상을 지니고 있는 토목구조물을 구성하는 요소들의 관계를 일반적으로 정의하기에는 어려움이 있었다.
반면, 모듈러 강교량을 구성하는 상부모듈은 표준화된 형상
을 가지고 있으며 표준화된 여러 파트로 구성되어 있어, 파라메
트릭 모델링 방법의 적용을 통하여 모듈의 효율적인 조립설계를
Fig. 1. 3D Shape of Superstructure Module on Modular Steel Bridge
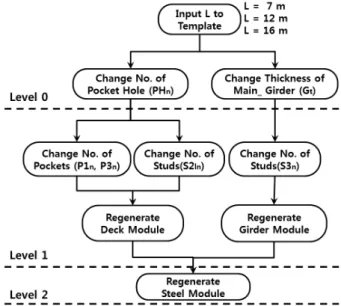
Fig. 2. Assembly System of Superstructure Module
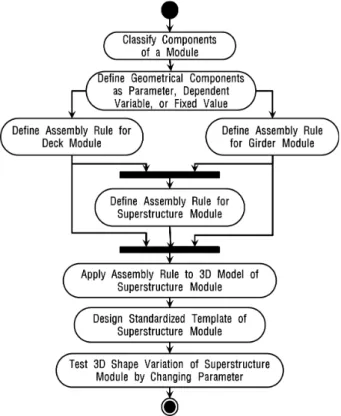
Fig. 3. Process for Parametric Assembly Design of Superstructure Module
가능하게 할 수 있다. 모듈러 교량을 개발하는 연구단에서 연구 하고 있는 강교량 상부모듈의 경우 현재까지 세 가지의 모듈이 설계되어 있으며, 각 모듈의 형상은 동일하나 모듈의 크기에 따라 모듈을 구성하는 파트의 공간적 위치와 배치가 달라진다.
따라서, 모듈의 조립설계 시 파라메트릭 모델링 방법 적용을 통해 각 파트들 간의 공간적 조립규칙을 정의하여 소수의 매개변 수 변경만으로 모듈 구성파트들을 자동 조립하여 새로운 모듈을 생성해낼 수 있다. 따라서, 본 연구에서는 모듈러 교량 연구단에 서 실용화를 위해 연구하는 모듈러 교량 중 강교량의 상부모듈을 대상으로 상부모듈을 형성하기 위한 구성파트들의 효율적인 3 차원 조립설계를 위하여 파라메트릭 모델링 방법을 적용하기 위한 연구를 수행하였다. 이때, 모듈러 강교량 상부모듈 구성파 트의 일부인 콘크리트 타설 부분은 실제로 조립되는 부분이 아니므로 본 연구에서는 다루지 않았으며, 주요 구조물을 대상 으로 한 연구로 볼트 및 너트와 같은 연결부 부품은 제외하였다.
2. 모듈러 강교량 상부모듈 구성파트의 조립설계 방법
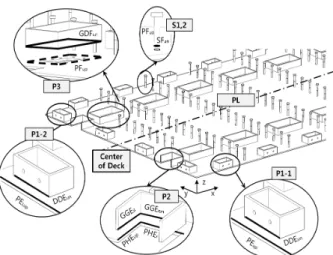
모듈러 강교량 상부모듈은 전체적으로 박스형 구조를 지니고 있으며 ‘U’ 형상의 강판의 절곡으로 형성된 강거더와 바닥판으 로 구성되어 있다. 강교량 모듈의 전체형상은 Fig. 1과 같다.
강교량 상부모듈의 조립체계와 조립체계에 따른 조립단계를 정의하기 위한 상세수준(Level of Detail: LoD)을 세 단계 (Level 0 ~ Level 2) 로 구분하여 정의하였으며 정의한 조립체계 를 Fig. 2에 나타내었다. Level 2는 하나의 세그먼트를 구성할 수 있는 모듈단위를 정의하기 위한 단계이며, Level 1은 하나 의 모듈을 구성하고 있는 하위 모듈인 바닥판 모듈 및 거더 모듈로 구분하였다. 또한, Level 0은 바닥판 모듈과 거더 모듈을 구성하는 파트들을 정의하기 위한 수준으로 바닥판 모듈을 구성 하는 플레이트, 포켓(거더-거더 연결포켓, 바닥판-바닥판 연결 포켓, 거더-바닥판 연결포켓), 그리고 거더 모듈을 구성하는 주형, 바닥판 모듈 및 거더 모듈에 장착되는 스터드로 구분하였다.
모듈러 강교량 상부모듈의 조립체계에 따라 각 파트들을
조립하고 하나의 모듈을 완성하기 위하여 우선, 모듈을 구성하
는 각 파트들의 형상을 구성하는 요소들을 추출하여 매개변수와
매개변수에 따라 변하는 종속변수, 매개변수에 따라 변하지
않는 고정 값으로 구분하여 정의하였으며, 정의한 변수 및 값
을 적용하여 각 파트들 간의 조립규칙을 정의하였다. Fig. 3은
모듈러 강교량 상부모듈의 조립설계 규칙을 정의하기 위한
프로세스를 나타낸 활동다이어그램(Activity Diagram)을 보여
준다. 조립규칙을 정의할 때는 각 파트들 간의 x, y, z 축에
대한 자유도 및 위치관계를 구속하기 위한 규칙을 생성하였다.
Fig. 4. 3D Geometric Component of Plate
강교량 모듈은 전체 폭은 동일하며 모듈의 길이가 달라짐에 따라 교축방향에 대한 모듈 구성파트의 배치가 달라지며, 거더 모듈에서의 주형의 두께가 달라진다. 따라서, 모듈 길이를 주요 매개변수로 하여 모듈 길이에 따라 달라지는 강교량 상부모듈의 형상 구성요소간의 관계를 규칙으로 정의하였다. 또한, 현재까 지 개발된 강교량 상부모듈은 전체형상과 구성요소들의 제원은 결정되었으나 스터드에 대한 배치는 결정되지 않은 상태이다.
따라서, 스터드 배치를 매개변수로 구분하여 스터드 배치에 대한 변경 발생 시 관련된 요소들을 신속히 수정하여 모델에 반영하기 위한 규칙을 정의하였다.
3. 강교량 상부모듈 구성파트의 3차원 형상 구성요소 정의
3.1 바닥판 모듈 3차원 형상 구성요소 정의
바닥판 모듈은 2장에서 나타낸 조립체계와 같이 플레이트, 세 종류의 포켓(거더-거더 연결포켓, 바닥판-바닥판 연결포 켓, 거더-바닥판 연결포켓), 스터드로 구성되어있다. 첫 번째로, 플레이트는 바닥판 모듈의 바닥판 역할을 하는 파트로 일정한 두께를 가지는 강판으로 이루어져 있으며, 내부에 거더와 연결 하기 위한 포켓홀을 포함하는 형태로 되어있다. Fig. 4에 플레이 트의 3차원 형상과 이를 구현하기 위한 주요 형상구성 요소를 나타내었다. 바닥판의 3차원 형상구현을 위한 구성요소는 너비 (D
w), 바닥판 두께(D
t), 그리고 바닥판 외부에서 포켓홀의 중심 부까지의 교축 및 교축직각방향으로의 거리(H
ol, H
ow), 거더-바 닥판 연결포켓홀 설치간격(H
dl) 으로 구분하였다. 이때, 모듈이 길어짐에 따라 거더-바닥판 연결포켓홀의 설치수(PH
n) 가 달라 지므로 포켓홀의 설치간격을 고정 값으로 구분하고 포켓홀의 설치수를 식 (1)에 의하여 모듈 길이에 따라 달라지는 종속변수 로 정의하였다. 즉, 모듈 길이에 따라 포켓홀이 자동으로 배치되 거나 제거될 수 있도록 하였다. 또한, 그 이외의 플레이트의 3 차원 형상을 구성하는 요소들은 모듈 길이에 따라 변하지 않으므로 고정 값으로 구분하였다.
(1)
정의한 플레이트의 3차원 형상 구성요소들은 플레이트의 형상생성뿐 만이 아니라 포켓 및 스터드의 장착위치와 바닥판 모듈과 거더 모듈 조립 시 주요한 요소로 적용된다. 거더-바닥판 및 거더-거더 연결을 위하여 형성되는 포켓홀의 형상 구성요소들 은 모듈의 길이에 따라 변하지 않으므로 고정 값으로 구분하였다.
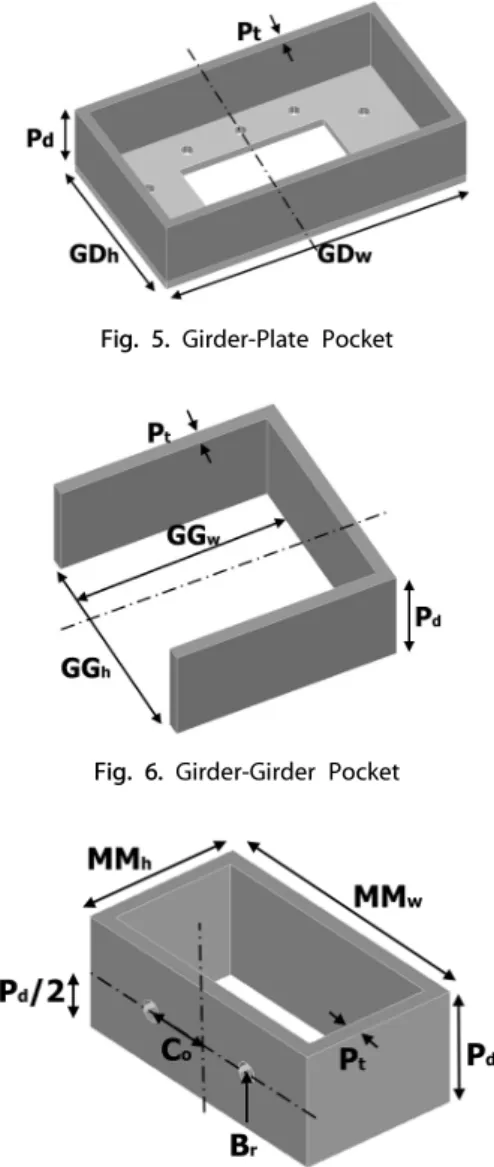
두 번째로 바닥판 모듈을 구성하는 항목은 포켓으로 크게 세 종류로 구분된다. 첫 번째는 Fig. 1에 나타낸 바와 같이 거더와 바닥판을 연결하기 위한 포켓으로 콘크리트 타설 이전에 거더와 바닥판간의 연결부를 보호하기 위하여 볼트 연결부의 둘레에 장착되어 거푸집의 역할도 동시에 수행한다. 두 번째 포켓은 모듈간의 연결 시 거더부를 연결하기 위한 포켓으로, 거더간 연결을 위한 바닥판의 직사각형 홀의 둘레에 장착되며, 첫 번째의 포켓과 같이 콘크리트 타설 시 거더간 연결부를 보호하는 거푸집 역할을 하게 된다. 마지막으로 모듈간 연결 시 바닥판 모듈간의 연결을 위한 포켓으로 첫 번째 두 번째 포켓과는 달리 볼팅에 의해 포켓간 직접 연결이 이루어진다.
세 종류의 포켓 형상을 Fig. 5, Fig. 6, Fig. 7에 나타내었다.
모듈러 교량 연구단에서 현재까지 개발된 포켓의 3차원 형상은 변하지 않는 형상으로 포켓형상 구성요소들을 고정변수로 구분 하였다. 다만, 플레이트 상부에 장착되는 포켓의 배치간격과 배치수는 바닥판 모듈의 조립규칙으로 정의하기 위하여 4.1절 에서 다루었다.
세 번째로 바닥판 모듈을 구성하는 플레이트에 장착되어
콘크리트 슬래브 사이의 전단연결재 역할을 하는 스터드는 일반
적으로 설계기준에서 제시하는 정형화된 형상을 사용하므로
포켓의 형상을 구성하는 요소들에 대해서는 정의하지 않았으며,
플레이트 위에 장착되는 스터드의 배치 위치와 배치간격에 대한
사항은 조립규칙으로 정의하기 위하여 4.1절에서 다루었다.
Fig. 5. Girder-Plate Pocket
Fig. 6. Girder-Girder Pocket
Fig. 7. Plate-Plate Pocket
Fig. 8. Geometric Component of Profile of Main Girder
Fig. 9. Geometric Component for Arrangement of Bolt Hole
3.2 거더 모듈 3차원 형상 구성요소 정의
거더 모듈은 주형과 스터드로 구성되어 있으며, 스터드는 플레이트에 장착되는 스터드와 동일한 형상을 가지므로 본 절에서는 주형의 3차원 형상 구성요소에 대하여 설명한다. 주 형은 ‘U’ 형상을 지니고 있으며 Fig. 8에 나타낸 바와 같이 주형의 단면형상은 중심선을 기준으로 두께를 가지는 절곡된 강판으로 구성되어있다. 주형 단면의 중심선 형상은 변하지 않으며 모듈의 길이에 따라 주형의 두께가 중심선을 기준으로 달라진다. 주형의 길이가 7 m 일 때 주형의 두께는 12 mm, 10 m 일 때 18 mm, 16 m일 때 24 mm를 가지도록 구조해석과 실험에 의하여 설계되었다. 따라서, 주형 단면형상의 중심선을 구성하는 요소를 고정 값으로 구분하였으며, 주형의 두께(G
t) 는 모듈의 길이에 따라 변하므로 종속변수로 구분하여 정의하였 다. 또한, 거더의 상부에는 Fig. 9에 나타내 바와 같이 바닥판과
연결하기 위한 볼트홀 집합을 지니고 있다. 볼트홀 집합의 경우, 배치간격(GH
dl) 과 배치수(GH
n) 가 3.1절에서 설명한 플레이트 의 거더-바닥판 연결포켓홀의 배치간격 및 배치수와 동일하다.
따라서, 주형의 볼트홀 집합 배치간격은 플레이트의 볼트홀 집합의 배치간격과 같이 고정 값으로 구분하였으며, 거더-바닥 판 연결포켓홀의 배치간격과 동일한 값을 가지도록 하였다.
또한, 볼트홀 집합의 배치수(GH
n) 는 거더-바닥판 연결포켓홀의 배치수와 동일하게 모듈의 길이에 따라 달라지므로 종속변수로 구분하였으며 거더-바닥판 연결포켓홀의 배치수와 동일하도록 정의하였다.
4. 강교량 상부모듈 구성파트의 조립설계 규칙 정의
4.1 바닥판 모듈에서의 조립설계 규칙
바닥판 모듈은 3장에서 설명한 바와 같이 플레이트, 포켓,
스터드로 구성되어 있으며 플레이트를 기준으로 세 종류의
포켓과 스터드의 장착에 의해 바닥판 모듈이 완성된다. 바닥판
모듈을 조립하기 위한 규칙을 정의할 때 파라메트릭 모델링
기법을 적용하여 각 부품간의 위치 구속규칙과 기하학적인
구속조건인 내재적 구속규칙을 정의하였다. 구속규칙을 정의할
Fig. 10. Geometrical Constraints for Assembling Deck Module
Fig. 11. Locational Constraints for Assembling Deck Module
때, 모듈의 위치와 길이 변경이 발생하여도 포켓과 스터드의 배치가 자동으로 동시에 조정될 수 있도록 구속조건을 부여하였 다. 바닥판 모듈의 조립을 위한 기하학적 구속조건을 Fig. 10에 나타내었으며, 위치 구속조건을 Fig. 11에 나타내었다.
첫 번째로 플레이트와 바닥판-바닥판 연결포켓(P1)의 조립관 계 규칙은 다음과 같이 이루어진다. 바닥판-바닥판 연결포켓은 플레이트의 교축방향 가장자리에 위치한 포켓(P1-1)과 교축직 각방향의 가장자리에 위치한 포켓(P1-2)으로 구분할 수 있다.
P1-1 의 경우, Fig. 10에 나타낸 포켓(P1-1)의 모서리 DDE
un가 플레이트(PL)의 모서리 PE
up와 일치한다는 구속조건을 부여하 였다. 이는 PL과 P1-1의 기하학적인 구속관계로 y축 및 z축 방향의 자유도를 구속하기 위한 것이다. 또한, P1-1을 플레이트 상부에 배치하기 위해서는 x축 방향의 위치를 결정해야하며 이는 x축 방향의 위치를 고정하는 것과 동시에 x축 방향으로의 자유도를 고정해주기 위한 것이다. Fig. 11에 나타낸 바와 같이
P1-1 의 x축 방향의 설치위치(P1
ol) 와 배치간격(P1
dl) 은 3.1절에 서 나타낸 플레이트의 거더-바닥판 연결포켓홀의 설치위치 및 배치간격이 동일하게 설계되어 있으므로 고정 값으로 구분하여 거더-바닥판 연결포켓홀의 배치와 동일하도록 정의하였다. 즉, P1-1 의 x축 방향 설치위치는 거더-바닥판 연결포켓홀의 설치위 치(H
ol) 와 동일하도록 하였으며, 배치간격은 거더-바닥판 연결 포켓홀의 배치간격(H
dl) 과 동일하도록 규칙을 부여하였다. 마찬 가지로, P1-1의 배치되는 수(P1
n) 는 모듈의 길이에 따라 변하는 종속변수로 거더-바닥판 연결포켓홀의 배치수(PH
n) 와 동일하 므로 거더-바닥판 연결포켓홀의 배치수와 동일하도록 규칙 을 부여하였다. P1-2의 경우, Fig. 10에서 포켓(P1-2)의 모서리 DDE
un이 PL의 모서리 PE
Lup와 일치한다는 구속조건을 부여하 여 PL과 P1-2의 x축 및 z축에 대한 자유도를 구속하였다.
또한, y축 방향으로의 자유도와 위치를 구속하기 위하여 Fig.
11 에서 PL의 상부 모서리(PE
up) 에서 첫 번째 P1-2 중심부 (CoP1-2) 까지의 거리(P1
ow) 와 P1-2 간의 거리(P1
dw) 구속이 필요하였으며, P1
ow와 P1
dw는 모듈 길이에 따라 변하지 않으므 로 고정 값으로 구분하였다.
두 번째로 거더-거더 연결포켓(P2)과 플레이트의 조립관계 규칙은 다음과 같이 이루어진다. 거더-거더 연결포켓은 플레이 트에서 거더-거더 연결포켓홀에 인접한 포켓으로 Fig. 10에서 P2 의 모서리 GGEiun과 PL의 모서리 PHEr의 일치와 P2의 모서리 GGEil과 PL의 모서리 PHEup의 일치를 구속규칙으로 정의하였다. 이를 통하여, PL과 P2를 x축, y축, z축에 대한 자유도 구속과 위치 구속을 동시에 구속할 수 있다.
세 번째로 거더-바닥판 연결포켓(P3)의 경우, 플레이트에 배치할 때 x축 방향에 대한 중심축의 위치(P3
ol) 와 배치간격 (P3
dl) 및 y축 방향에 대한 중심축의 위치(P3
ow) 는 모듈의 길이에 따라 변하지 않으므로 고정 값으로 구분하였으며, 3.1절에서 설명한 플레이트의 거더-바닥판 연결포켓홀의 위치, 배치간격 과 동일하므로 각 중심축의 위치와 배치간격이 동일한 값을 지니도록 하였다. 이는 P3와 PL의 x축 및 y축 방향으로의 자유도를 구속하고 위치를 구속하기 위한 것이다. 또한, x축 방향으로 P3가 배치되는 수(P3
n) 의 경우, 거더-바닥판 연결포켓 홀의 배치수와 동일하게 모듈 길이에 따라 변하므로 종속변수로 구분하였으며, 거더-바닥판 연결포켓홀의 배치수와 동일하도록 구속규칙을 부여하였다. z축 방향으로의 자유도를 구속하기 위하여 Fig. 10에 나타낸 바와 같이 P3의 바닥면인 GDF
un과 PL 의 상부면인 PF
up이 일치되도록 규칙을 정의하였다.
마지막으로, 스터드(S1, S2)와 플레이트(PL)의 조립을 위한
구속규칙은 다음과 같다. 스터드는 바닥판 모듈의 x축 방향으로
시점과 종점의 첫 라인과 끝 라인에 배치되는 스터드(S1)와
Fig. 12. Geometrical Constraints of assembling Girder Module
Fig. 13. Locational Constraints of Assembling Girder Module
중심부에 반복적으로 배치되는 스터드(S2)로 구분하여 정의하 였다. S1의 경우, Fig. 11에 나타낸 바와 같이 x축 방향으로의 위치(S1
ol) 는 모듈의 길이에 따라 변하지 않으므로 고정 값으로 정의하였으며, y축 방향으로의 위치(S
ow1) 와 배치간격(S
dw1) 도 모듈의 길이에 따라 변하지 않으므로 고정 값으로 구분하여야한 다. 다만, 현재까지 개발된 강교량 상부모듈에 배치되는 스터드 간격이 결정되지 않았으므로, 스터드 간격을 매개변수로 설정 하여 스터드 배치간격에 따라 변하게 되는 설치되는 스터드의 수(S1
wn) 를 종속변수로 구분하여 정의하였다. 스터드의 수는 스터드의 위치 및 간격에 따라 식 (2) 에 의하여 자동 생성될 수 있도록 하였다.
(2)
S2 의 x축 방향 중심축 위치(S2
ol) 는 P3의 설치간격 중심부에 위치하도록 설계되어 있으며 모듈 길이에 따라 변하지 않으므로 고정 값으로 구분하였으며, S2의 배치가 시작되는 위치를 식 (3) 에 의하여 결정될 수 있도록 하였다. 또한, S2가 x축 방향으로 P3 사이에 P3와 동일한 간격으로 배치되도록 설계되어 있으므 로 S2의 x축 방향으로의 배치간격(S2
dl) 을 P3의 배치간격(P3
dl) 과 동일하도록 하였으며 모듈 길이에 따라 변하지 않으므로 고정 값으로 구분하였다. S2의 x축 방향으로 배치되는 수(S2
ln) 는 식 (4)와 같이 산출될 수 있도록 하였으며, 식 (4)에서의 PH
n은 거더-바닥판 연결포켓홀의 배치수로 모듈 길이에 따 라 변하는 종속변수이므로 S2의 배치수를 모듈 길이에 따라 변하는 종속변수로 정의하였다. y축 방향으로의 위치를 구속할 때 Fig. 11에서 상 · 하부의 모서리부터 S2의 중심축까지의 거리(S
ow2) 와 S2간의 배치간격(S
dw2) 을 고정변수로 구분하여야 하지만 S1과 마찬가지로 배치간격이 결정되지 않았으므로 배치 간격은 매개면수로 설정하였다. 또한, S2의 배치간격에 따라 변하는 배치수(S2
wn) 를 종속변수로 구분하여 식 (5)에 의하여 산출될 수 있도록 하였다. 스터드의 배치간격은 국내 도로교설 계기준(Korea Expressway Corporation, 2010)에 의하여 규정 하고 있다. 교축방향 배치 최소간격은 스터드 줄기 지름(d)의 5 배 이상으로 규정하고 있으며, 교축직각방향 배치 최소간격은
‘d + 30 mm’ 로 규정하고 있다. 최대배치간격은 600 mm이며, 스터드와 바닥판의 연단 또는 포켓과의 최소거리는 25 mm로 규정하고 있다. 따라서, 스터드를 배치할 때 최대 및 최소 간격에 대한 구속조건을 부여하였다.
(3)
ln
(4)
(5)
S1, S2 의 z축 방향 자유도를 구속하기 위하여 Fig. 10에 나타낸 바와 같이 S1, S2의 하부면인 SF
un과 PL의 상부면인 PF
up이 일치하도록 구속조건을 정의하였다.
4.2 거더 모듈에서의 조립설계 규칙
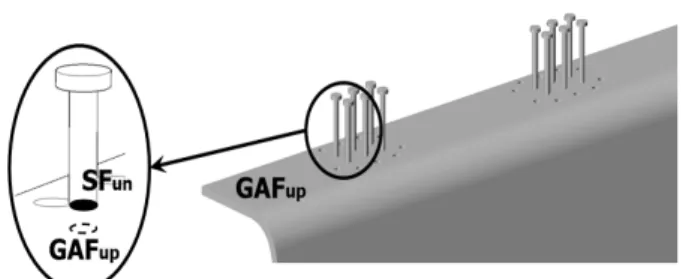
거더 모듈은 주형과 스터드로 구성되어있다. 두 항목의 파트 를 조립하여 거더 모듈을 형성하기 위해 스터드와 주형의 구 속규칙을 정의하였다. Fig. 12에 나타낸 바와 같이 주형의 상부 면(GAF
up) 에 스터드 집합이 일정한 간격으로 배치되어있다.
Fig. 13 에 나타낸 바와 같이 스터드 집합이 시작되는 중심선의
x 축 및 y축의 위치(SC
ow, GS
ol) 와 x축 방향의 배치간격(SC
dw)
은 3.1절에서 정의한 거더-바닥판 연결포켓홀의 위치(H
ow, H
ol)
와 배치간격(H
dl) 이 동일하다. 따라서, 스터드 집합의 배치위치
와 배치간격의 경우 거더-바닥판 연결포켓홀과 같이 고정 값으
로 구분하였으며, 배치수의 경우 모듈 길이에 따라 변하는 종속
변수로 포켓홀의 배치수와 동일하도록 하였다. 마지막으로,
z 축 방향 자유도 구속을 위하여 Fig. 12에 나타낸 바와 같이
스터드의 하부면인 SF
un과 주형의 상부면인 GAF
up이 일치하도
록 구속조건을 부여하였다.
Fig. 14. Geometrical Constraints for Assembling a Superstructure Module
Fig. 15. Standard Template for 3D Assembling of Superstructure
Fig. 16. Algorithm for Assembling Superstructure Module according to Module Length
4.3 거더 모듈과 바닥판 모듈 조립설계 규칙
조립된 Level 1의 바닥판 모듈과 거더 모듈을 조립하여 Level 2 의 강교량 모듈을 구성하려면 바닥판 모듈과 거더 모듈 간의 x, y, z축 방향으로의 구속규칙을 정의하여야 한다. Fig.
14 에는 바닥판 모듈과 거더 모듈의 조립을 위한 기하학적 구속 규칙을 나타내었다. Fig. 14에서 보는 바와 같이 x축 및 y축 구속을 위하여 바닥판 모듈의 시작점인 DC
st와 거더 모듈의 시작점인 GC
st를 일치시킴으로써 구속하였으며, z축 방향으로 의 구속을 위하여 바닥판 모듈에서 플레이트의 하부면인 PF
un과 거더 모듈에서 주형의 상부면인 GLF
up을 일치시켜 구속할 수 있도록 하였다.
5. 파라메트릭 모델링 적용성 검증
5.1 규칙부여를 통한 모듈생성 방법
본 장에서는 3절 및 4절에서 정의한 각 파트들의 3차원 형상 구성요소간의 관계와 모듈을 생성하기 위한 각 파트들 간의 구속규칙을 적용하여 모듈러 강교량 상부모듈의 표준템플 릿을 작성하였으며, 매개변수를 변경하여 정의한 규칙들의 수행 성과 규칙들 간의 충돌여부를 검토하였다. 표준템플릿의 작성은 파라메트릭 모델링 툴인 CATIA V5의 환경에서 수행하였으며 Fig. 15 에 구축한 표준템플릿을 나타내었다. 표준템플릿에 적 용한 매개변수는 모듈 길이와 스터드의 배치간격이며, 두 가지 방법에 의하여 규칙의 적용성을 검토하였다. 첫 번째는 모듈 길이에 따른 규칙의 적용성을 검토하기 위하여 매개변수로 정의 한 스터드의 배치간격을 고정하고 모듈 길이만을 변경하여 모듈 길이에 따라 변하는 종속변수인 주형두께와 포켓홀, 포켓, 스터드 의 교축방향 배치수의 변화를 검토하였다. 두 번째는 모듈 길이를 고정하고 스터드의 배치간격을 변경하여 배치간격에 따른 스터 드 배치수의 변화를 검토하였다. 매개변수를 변경하여 모듈을 재성할 때 구속조건간의 충동을 없었으며 소요되는 시간은 평균 30 초가 걸렸다. 이는 파라메트릭 모델링 방법을 적용하지 않았을
때 설계변경 발생 시 설계자가 직접 모델을 재생성하는 시간에 비하여 많은 시간이 절약되는 것을 알 수 있다.
5.2 모듈 길이에 따른 형상변화 검토
현재 설계된 모듈 길이는 세 가지로 7 m, 10 m, 16 m가 있으며, 세 가지 모듈의 길이를 각각 적용하여 모듈 길이에 따른 모듈의 전체형상 변화를 검토하였다. Fig. 16에 모듈의 길이에 따른 모듈 자동생성 알고리즘을 나타내었다.
모듈의 길이가 변화함에 따라, 바닥판 모듈에서 식 (1)에
의하여 교축방향으로 배치되는 포켓홀의 수 및 포켓의 수가
변하며 스터드의 수는 식 (4)에 의하여 변하게 된다. 거더-바닥판
Fig. 17. Defining Arrangement of Pocket Hole and Pocket
Fig. 18. Defining The Number of Pocket Hole arranged
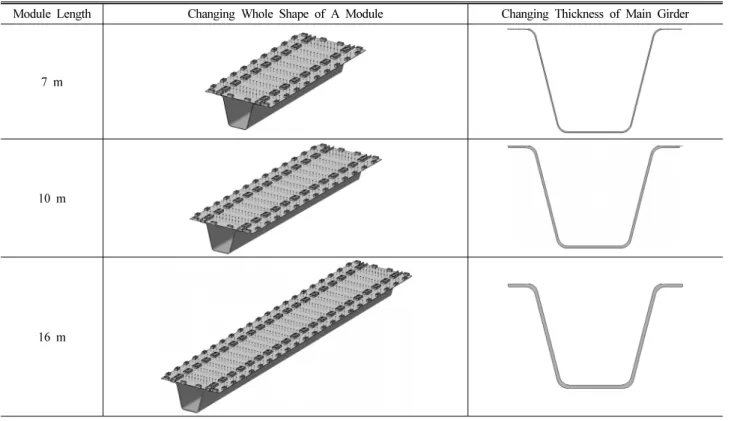
Table 1. 3D Shape Variation by Module Length
Module Length Changing Whole Shape of A Module Changing Thickness of Main Girder
7 m
10 m
16 m
Fig. 19. Defining Rule for Changing Thickness of Main Girder according to Module Length
연결포켓홀과 배치간격이 동일한 포켓 및 스터드의 배치를 포켓홀과 동일하게 배치하게 하기위하여 CATIA에서 ‘Array_
Dis’ 라는 새로운 값을 생성하여 ‘공식’ 기능을 통해 동일한 배치간격인 ‘Array_Dis’ 값을 가질 수 있도록 하였다. Fig. 17 은 포켓홀의 배치간격과 포켓 P3의 배치간격을 동일한 값인
‘Array_Dis’ 로 정의한 것을 나타낸 것이며, Fig. 18은 배치간격 에 따른 배치수를 정의한 것이다.
또한, 거더 모듈에서 모듈의 길이에 따라 주형두께가 변하게
되는데, 이는 일정한 공식에 의한 것이 아닌 구조해석 및 실험결
과를 통하여 도출된 결과로 Fig. 19에 나타낸 바와 같이 CATIA
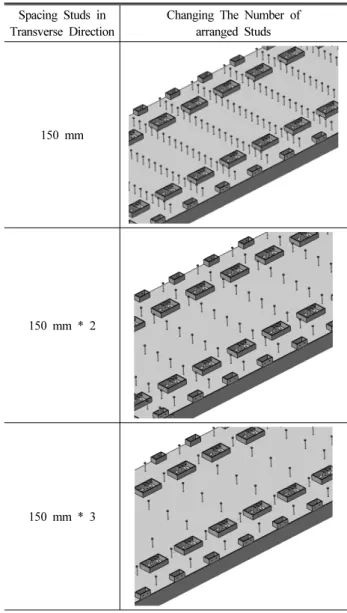
Table 2. Variation of The Number of Arranged Studs according to Spacing
Spacing Studs in Transverse Direction
Changing The Number of arranged Studs
150 mm
150 mm * 2
150 mm * 3
Fig. 20. Error Message for Un-Following Difference between Studs on Design Specification
의 ‘Rule’ 기능의 ‘IF’ 문을 적용하여 모듈의 길이가 7 m, 10 m, 16 m 에 따라, 주형두께가 각각 12 mm, 18 mm, 24 mm 로 변화할 수 있도록 하였다.
주형에 교축방향으로 설치되는 스터드 집합의 수도 주형의 길이에 따라 달라지며, 이는 포켓홀의 배치수에 의존하므로 포켓수의 변화에 따라 동시에 변하게 된다. Table 1은 세 가지의 모듈 길이를 적용한 결과로 모듈의 길이가 길어짐에 따라 포켓 홀, 포켓, 바닥판 모듈의 스터드, 거더 모듈의 스터드 집합수가 동시에 증가하여 각 모듈의 길이에 맞는 형상을 형성하는 것을 확인할 수 있었으며, 거더 모듈에서 주형의 두께가 규칙에 따라 증가하는 것을 확인할 수 있었다.
5.3 포켓 및 스터드 배치간격에 따른 형상변화
강교량 모듈 구성요소들의 형상과 제원은 결정되었으나 교축 직각방향으로의 스터드의 배치간격은 아직 정확히 결정되지 않은 상태이다. 스터드의 배치간격에 따라 배치되는 수가 달라 지므로 배치간격에 대한 변경발생 시 신속히 모델에 반영할 수 있도록 하였다. 교축직각방향의 스터드의 배치간격은 현재 150 mm 로 설계되어 있으며, 본 연구에서 정의한 규칙에 의하여 배치간격에 따른 배치수의 변화를 검토하기 위하여 배치간격을 150 mm 의 2배, 3배 증가하여 적용하였으며, 이에 따라 Table 2 에 나타낸 것과 같이 스터드의 수가 감소함을 확인 하였다.
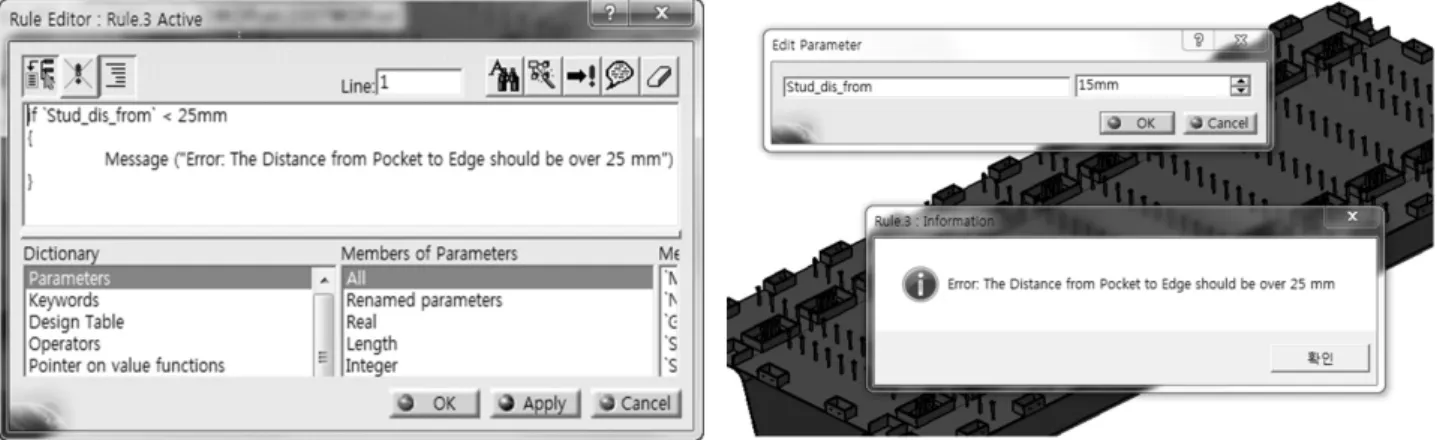
이때, 스터드의 배치간격에 대한 최대 및 최소 규정을 만족 시키기 위하여 배치간격에 대한 구속조건을 CATIA의 ‘Rule’
기능을 통하여 해당 범위를 만족하지 않을 경우, 메시지로 경
고할 수 있도록 하였다. Fig. 20은 교축직각방향 스터드 간
격 설정 시 설계기준 미준수에 대한 경고 메시지를 나타낸
것이며, Fig. 21은 스터드와 포켓과의 최소 거리 미준수 시에
대한 경고 메시지를 나타낸 것이다.
Fig. 21. Error Message for Un-Following Minimum Difference between Stud and Pocket on Design Specification
6. 결 론
본 연구에서는 여러 파트의 조립체인 모듈러 강교량 상부모듈 구성요소간의 효율적인 3차원 조립설계를 위하여 파라메트릭 모델링 방법을 적용한 연구를 수행하였다. 파트의 조립을 위하 여 파트간의 공간적 위치를 구속규칙으로 정의하였으며, x, y, z 축 자유도 구속을 위하여 기하학적 관계를 구속규칙으로 정의하였다. 또한, 모듈러 강교량 상부모듈 구성요소의 3차원 기반 조립설계를 위한 표준템플릿을 작성하였으며, 정의한 구속 규칙을 적용하여 주요 매개변수 변경만으로 관련된 형상정보가 자동 수정되어 원하는 형상을 얻을 수 있었다. 파라메트릭 모델 링 방법을 적용한 모듈 형상 재생성 시 평균 30초의 시간이 소요되었으며, 이를 통하여 강교량 모듈의 조립설계 시 파라메 트릭 모델링 방법 적용을 통하여 시간과 인력을 줄여 효율적인 설계변경이 가능함을 보였다. 본 연구에서 정의한 강교량 모듈 의 파트간 관계를 통하여 향후 새로운 모듈의 추가가 발생하거나 설계변경 발생 시 3차원 모델을 재 생성하는데 소요되는 시간과 인력을 줄일 수 있을 것이라 기대할 수 있다. 또한, 본 연구는 모듈러 강교량에 초점을 두어 수행한 연구이나, 본 연구에서 정의한 파트간의 구속규칙 개념을 타 구조물 설계 시 적용하여 설계업무의 효율성을 향상 시킬 수 있을 것이라 기대할 수 있다.
감사의 글
본 연구는 국토해양부 건설기술혁신사업의 연구비 지원(10 기술혁신B01-모듈러 교량 기술개발 및 실용화 연구단)에 의해 수행되었음.
References
Amber, A.P. and Popplestone, R.J. (1975) Inferring the positions of bodies from specified spatial relationships, Artificial Intelligence, Vol. 6, No. 2, pp. 157-174.
Cho, S.-H., Park, J.-G., Lee, H.-M, and Shin, H.-M. (2010) Implementation of 3D object model considering recycle design of PSC box girder, Journal of Computational Structural Engineer- ing Institute of Korea, Vol. 23, No. 3, pp. 325-330. In Korean.
Hong, S.-U., Cho, Y.-S., Lee, J.-H, and Hong, S.-C. (2011) The study on development of automatic reinforcement placing system of columns for RC structures based on parametric technology, Journal of Architectural Institute of Korea, Vol. 27, No. 1, pp.
11-18. In Korean.
Ji, Y., Beetz, J., Bonsma, P., Bisbet, N., Katz, C., and Borrmann, A.
(2011a) Integration of parametric geometry into IFC-bridge, Proceeding of The 23th Forum Bauinformatik, Cork, Ireland, pp.
158-164.
Ji, Y., Borrmann, A., and Obergrießer, M. (2011b) Towards the ex- change of parametric 3D bridge models using a neutral data for- mat, Proceeding of the ASCE International Workshop on Com- puting in Civil Engineering. Miami, USA, pp. 528-535.
Kikkawa, K., Suzuki, H., Ando, H., and Kimura, F. (1993) A prod- uct modeling system for top-down design of machine assembly with kinematic motion, Robotics and Computer-Integrated Manu- facturing, Vol. 10(1-2), pp. 49-55.
Kim, K.-J., Sacks, E., and Joskowicz, L. (2003) Kinematic analysis of spatial fixed-axis higher pairs using configuration spaces, Computer Aided Design, Vol. 35, No. 3, pp. 279-291.
Kim, S.-H, Lee, S.-H., Nam, S.-H., and Sun, O.-Y (2011) A study on the construction management method based on BIM for civil engineering project, Journal of Computational Structural Engin- eering Institute of Korea, Vol. 24, No. 4, pp. 463-470. In Korean.
Korea Expressway Corporation (2010) Road Design Specification, Korea Ministry Land, Transport and Maritime Affairs. In Korean.
Lee, K.M., Lee, Y.B. Shim, C.S. and Park, K.L. (2012) Bridge in-
formation models for construction of a concrete box-girder bridge, Structure and Infrastructure Engineering: Maintenance, Manage- ment, Life-Cycle Design and Performance, Vol. 8, No. 7, pp.
687-703.
Lee, S.-H., Kim, B.-G., and Kim, H.-J. (2008) A new strategy for IT-based national asset management of civil infrastructure in Korea, The 3rd International Workshop on Lifetime Engineering of Civil Infrastructure (IWLCE`08), Japan, pp. 41-55.
Lee, S.-H, An, H.J., Kim, B.-G., and Eom, I.-S. (2010) A parametric modeling method for automatic fitting of longitudinal geometry of box girder in FCM bridge, Journal of Computational Structur- al Engineering Institute of Korea, Vol. 23, No. 4, pp. 33-42. In Korean.
Lee, S.-H. and Jeong, Y.-S. (2006) A System integration framework through development of ISO 10303-based product model for steel bridge, Automation in Construction, Vol. 15, No. 2, pp. 212-228.
Lee, S.-H., Jeong, Y.-S., and Kim, B.-G. (2005) Sharing of steel bridge information using CAD system with ACIS solid modeler, Journal of Korean Society of Civil Engineering, Vol. 25, No. 4A,
pp. 677-687. In Korean.
Lee, S.-H. and Kim, B.-G. (2011) IFC extension for road structures and digital modeling, Procedia Engineering, Vol. 14, pp. 1037- 1042.
Liu, H.C. and Nnaji, B.O. (1991) Design with spatial relationships, Journal of Manufacturing System, Vol. 10, No. 6, pp. 449-463.
RIST (2010) The Research Plan of The Construction Technology Innovation Program of Ministry of Land, Transportation and Maritime Affairs - Research and Business Development of Modu- lar Bridge, RIST. In Korean.
Rossignac, J.R. (1987) Constraints in constructive solid geometry, Proceeding of The 1986 Workshop on Interactive 3D Graphics (I3D), New York, pp. 93-110.
Sacks, R.(2004) Evaluation of economic impact of three-dimen- sional modeling in precast concrete engineering, Journal of Com- puting in Civil Engineering, Vol. 18, No. 4, pp. 301-312.
Weibing, P., Liangliang, S., and Guoshuai, P. (2008) Solving topo- logical and geometrical constraints in bridge feature model, Tsinghua Science & Technology, Vol. 13(s1), pp. 228-233.