계통 연계형 인버터의 정지좌표전류제어 및 외란제거 제어알고리즘 설계
Design of stationary reference frame current and disturbance rejection control algorithms for a grid connected inverter
김 성 현*, 이 재 석*★ Seonghyeon Kim*, Jae Suk Lee*★
Abstract
This paper presents a grid current control algorithm for a grid connected inverter (GCI) system in a stationary reference frame. When a Proportional Integral (PI) controller at a stationary reference frame is used in a GCI system, steady state error and phase lags are presented because AC signals are controlled at a stationary reference frame. In this paper, a feedforward controller is applied to the PI controller to compensate the steady state error and phase lags by improving command tracking performance. In addition, disturbance rejection control is applied to the PI controller to protect the GCI system by eliminating disturbance, grid voltage in a GCI system, when a grid fault such as line-to-line fault, happens. The proposed GCI current control algorithm is analyzed in a frequency domain and a simulation model of the proposed GCI current control system is developed for verification of the performance.
요 약
본 논문에서는 계통연계인버터용 정지좌표기반 전류제어알고리즘을 제안한다. PI 제어기는 계통 연결 인버터의 전류 제어 기로 사용되고 있다. 정지좌표기반 PI 제어기를 사용할 경우, AC 신호 제어로 인하여 정상 상태 오류와 위상지연현상이 발생 한다. 본 논문에서는 전향보상기를 추가하여 명령 추적 성능을 높이고 과도 응답을 개선하는 방법을 제안한다. 또한 계통 전 압을 외란으로 사용하여 계통 오류 발생 시 시스템을 보호하기 위해 외란을 측정 및 제거하는 제어 방법을 제안한다. 제안된 제어 방법은 수학적으로 유도하고 전달 함수로 표현하였으며 시뮬레이션을 통하여 검증하였다.
Key words:Stationary reference frame PI control, Command feedforward control, Disturbance rejection control, Grid-Connected Inverter
* Department of Electrical Engineering, Jeonbuk National University
★ Corresponding author
E-mail:[email protected], Tel:+82-63-270-2398
※ Acknowledgment
This research was supported by Korea Electric Power Corporation through Korea Electrical Engineering &
Science Research Institute [grant number: R17XA05-7].
This research was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2020R1C1C1013260).
Manuscript received Mar. 6, 2020; revised Mar. 18, 2020;
accepted Mar. 18, 2020.
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Ⅰ. 서론
신재생에너지원이 개발됨에 따라 단방향 전력망 에서 양방향 전력망으로 분산전원을 기반으로 한 스마트 그리드가 형성되고 있다. 여러 분산전원이 계통에 연결되면서 계통이 더욱 복잡해짐에 따라 계통 연계형 인버터(Grid Connected inverter, GCI) 의 역할이 더 중요시 되고 있다[1, 2]. GCI는 전류 제어, 계통 동기화, 전력품질, 사고 시 전원보호 등 의 역할을 담당한다. 이러한 역할을 효과적으로 수 행하기 위해 여러 가지 제어 방법이 개발되고 있다.
Proportional integrator(PI) 제어기는 구현이 간단 하고 안정성이 높아 여러 산업분야에서 사용되고 154
있으며 계통연계시스템의 전류제어목적으로도 적 용되었다[3, 4]. Proportional Resonant(PR) 제어기 는 정지좌표계를 사용하여 선택적 고조파 보상기 로 채택되었다[5]. 공진 주파수에서 높은 이득을 달 성할 수 있고, 저차고조파를 선택적으로 보상 가능 하다. 하지만 각각의 고조파를 보상하기 위해 별도 의 공진항이 필요하여 제어기 구조가 복잡해진다.
이외에도 Sliding Mode Control(SMC)는 매개 변 수 변동과 외란에 영향을 받지 않지만 채터링 문제 가 있다[6, 7]. 예측제어[8] 많은 양의 변수 제어와 미래의 동적특성예측을 통하여 현재 시점에서의 최적화운전이 가능하지만 매개변수변동에 민감하 고 많은 양의 계산이 필요하다. 반복제어[9]는 정상 상태 오차를 효과적으로 제거하고 THD를 최소화 할 수 있지만 동적 응답이 느린 단점이 있다.
동기좌표기반 PI제어기는 DC신호를 제어함으로써 정상상태 오차를 줄일 수 있지만 d축과 q축 신호 사 이에 cross coupling이 발생하고, 좌표변환 시 계통 전압의 위상정보가 필요하기 때문에 Phase locked loop(PLL)을 사용하여야 한다. 동기좌표전류제어를 위한 두 번의 좌표변환을 위하여 불안정한 전압을 PLL로 추정할 경우에 추정된 계통위상에 오차가 발 생한다. 반면 정지좌표계를 사용할 경우 위상정보가 필요하지 않아 PLL과 d축과 q축 신호 간의 cross coupling을 피할 수 있다. 하지만, 정지좌표계로 변환 된 신호를 제어할 경우, 교류신호 제어특성으로 인하 여 주파수변화에 따른 정상상태오차와 위상오차가 발 생할 수 있다[10]. 본 논문에서는 위에 기술된 정지좌 표제어의 단점을 보완하기 위하여 PI제어기와 더불어 전향보상기(Command Feedforward)를 적용하였다.
계통연계 전류제어 시스템에서 계통전압은 시스 템의 외란에 해당된다. 지락 또는 단락과 같은 계 통사고 시 계통과 GCI에 과전류가 발생하고 과전류 정도에 따라 GCI가 파손되거나 트립이 발생한다.
본 논문에서는 외란제거 제어알고리즘을 통하여 외란에 대한 시스템의 제어성능(동강성 향상 및 과 전류 감소 등)을 향상시키는 방법(외란제거제어기) 을 제안하였다.
Ⅱ. 본론
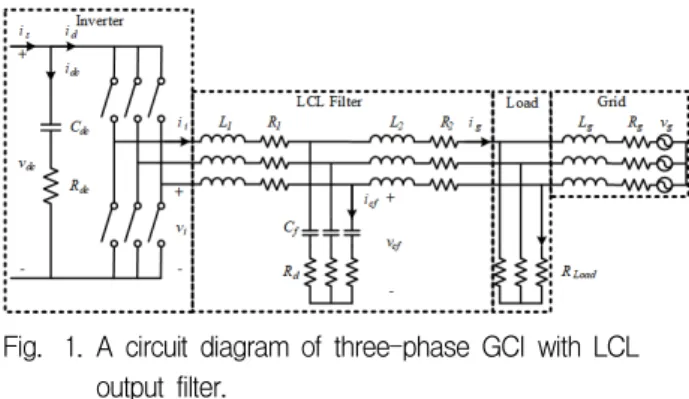
1. 제안하는 정지좌표기반 GCI 제어알고리즘 일반적으로 GCI시스템은 그림 1과 같이 GCI,
LCL필터, 부하, 계통으로 구성된다.
Fig. 1. A circuit diagram of three-phase GCI with LCL output filter.
그림 1. LCL필터를 포함한 3상 GCI 회로도
그림 1의 L1, R1는 인버터 측, L2, R2는 계통 측, Lg, Rg는 계통임피던스의 인덕턴스와 저항을 나타 내고, Cf는 필터 커패시터를 Rd는 댐핑저항, Rload는 부하저항을 나타낸다.
그림 1의 LCL필터의 전압과 전류 방정식은 식 (1)과 같다.
(1)
식 (1)에서 x는 a, b, c상을 나타낸다. Clarke 변 환을 사용하여 정지좌표계로 변환하였으며 변환식 은 (2)와 같다.
(2)
식 (1)과 (2)를 사용한 정지좌표계 전압 전류 방 정식은 식 (3)과 같다. α와 β가 같은 형태의 식이 되므로 α만 나타내었다.
(3)
변환된 식을 라플라스 변환하면 식 (4)와 같다.
(4)
식 (4)에서 R1, R2, Lg와 Rg는 매우 작은 값이라 가정하여 무시한 후, 입ㆍ출력 전달함수를 구하면 다음과 같이 나타난다.
(5)
식 (5)의 전달함수를 이용한 기존 PI 전류제어기 의 블록선도는 그림 2와 같다.
Fig. 2. A block diagram of the conventional GCI current control algorithm.
그림 2. 기존 PI전류제어 알고리즘 블록선도
그림 2의 시스템에서 전류의 지령은 정지좌표계 에서의 계통 전압과 전류를 이용한 유효 및 무효 전력 계산방법을 이용하여 생성하였다[11]. 그림 2 의 x는 α와 β를 대신 사용하였으며 전달함수는 (6) 과 같다.
(6)
(7)
(8)
(9)
(10)
정지좌표계 PI제어기 사용 시 나타나는 오차를 제거하기 위해 식 (6)의 전달함수를 기존 시스템에 변화를 주지 않고 1차와 2차 인덕턴스 추정치를 사 용하여 그림 3과 같이 전향보상기를 설계하였다.
설계된 제어기의 전달함수는 식 (11)과 같다.
Fig. 3. A block diagram of the proposed GCI current control algorithm.
그림 3. 제안하는 제어 알고리즘 블록선도
(11)
제어시스템의 성능을 나타내는 지표는 (11)과 같은 지령추종성능(command tracking performance)와 더불어 단위출력신호변화를 위해 요구되는 외란의 크기를 나타내는 지표인 동강성(dynamic stiffness) 가 있다. 즉 동강성이 크다는 것은 출력신호를 변 화시키기 위한 외란의 크기가 커야된다는 것을 의 미하므로 시스템의 동강성이 커짐에 따라 외란의 영향의 덜 받는 것을 의미한다. 계통사고(외란)으 로 인한 제어성능을 확인하기 위하여 기존 GCI 제 어시스템의 동강성을 유도하였다.
(12)
계통전압(외란)으로부터의 영향을 줄이기 위하여 그림 3과 같이 측정된 계통전압을 PI 제어기 출력 과 함께 GCI 입력으로 적용하였다.
측정된 계통전압을 GCI 입력으로 적용함으로써 계통전압(외란)이 GCI에 미치는 영향을 상쇄하였 고 외란에 대한 영향이 감소함에 따라 GCI 시스템 의 동강성이 향상되었다. 제안하는 시스템의 동강 성 전달함수는 (13)와 같다.
(13)
2. 외란제거제어 알고리즘 성능 검증
제어기 이득선정과 성능 검증을 위해 표 1의 제 정수를 사용하여 근궤적, 보드선도, 동강성을 확인 하였다.
Fig. 5. Bode plots of GCI control systems with or without command Feedforward.
그림 5. 전향보상기 유무에 따른 전류제어기 보드선도 Table 1. LCL filter parameters.
표 1. LCL 필터 제정수
Parameters Value Unit
Grid Voltage (Vg) 200 Vac
Grid Frequency (fg) 60 Hz
DC-link Voltage (Vdc) 350 Vdc
Switching Frequency (fsw) 10 kHz Inverter side Inductance (L1) 1.5 mH Grid side Inductance (L2) 1 mH
Capacitance (Cf) 2.75 μF
Damping Resistance (Rd) 4.9 Ω
Fig. 4. A root-locus of proposed GCI current control algorithm.
그림 4. 제안하는 계통연계 전류제어시스템의 근궤적
식 (5)를 이용한 근궤적은 그림 4와 같다. 그림 4 에 보이는 바와 같이, 비례제어이득(Kp)가 증가함 에 따라 비안정영역을 향하여 이동하기 때문에 제 어기 설계 시 시스템의 근궤적 특성을 반드시 참고 해야한다. 그림 5는 전향보상기가 적용되기 전과 적용된 제어시스템의 보드선도를 보여준다. 그림 5에 보이는 바와 같이 동일한 제어이득을 적용하였을 시, 기존기법과 비교하여 전향보상기가 전향된 시 스템의 대역폭이 넓고(지령추종성능이 향상되고)
위상지연이 낮아짐을 확인할 수 있다.
제어기의 동강성은 식 (11)과 (13)을 이용하여 그 림 6에서 확인할 수 있다.
Fig. 6. Dynamic stiffness with and without disturbance reject control in a GCI current control system.
그림 6. 계통연계 전류제어시스템의 외란제거제어 전/후 동강성 시뮬레이션 결과
그림 3과 같이 외란을 측정하고 측정된 외란을 제어기 출력에 반영하여 외란을 제거함으로써 공 진현상이 완화된 것을 확인할 수 있다. 또 저주파 수 영역에서 외란제거 성능이 더 뛰어나지만 고주 파수 영역에서는 반대로 제거전이 더 뛰어난 것을 볼 수 있다. 하지만 기본파의 고차고조파의 크기가 작으므로 충분한 외란제거성능을 보여준다.
3. 외란제거 GCI 전류제어알고리즘 시뮬레이션 모델 개발
제안하는 계통연계인버터의 외란제거 전류제어알 고리즘을 PLECS을 이용하여 시뮬레이션모델을 구 현하였다. 그림 7은 계통이 정상상태인 경우 3상 전 압과 GCI 시스템에서 출력되는 전류를 보여준다.
그림 7과 같이 기존 전류제어기의 출력은 지령보 다 10[%] 작고, 12° 가량 지상인 것을 확인할 수 있 다. 제안하는 제어방법은 크기는 1.82[%]작고, 1.9°
정도 지상이 발생하였기에 기존제어방법보다 성능 이 뛰어난 것을 시뮬레이션을 통하여 확인하였다.
그림 8의 (i), (ii)는 전향보상기의 추정값인 인버 터 측 인덕턴스와 계통 측 인던턴스의 추정값에 오 차가 있는 경우 출력전류를 보여주고, (iii)계통 전 압을 측정하는 센서에 오차가 있는 경우 출력전류 를 보여준다. 각각 ±20%의 오차가 있는 것으로 가 정하였지만 출력전류에는 큰 영향을 받지 않는 것 을 확인할 수 있다.
Fig. 7. Grid phase voltage and output current (α-axis) during normal system operation.
그림 7. 계통전압이 정상상태인 경우 제어기별 출력전류 비교 (α-axis)
Fig. 8. Parameter sensitivity of the proposed controller (α-axis)
그림 8. 제안된 제어기의 매개변수 민감도 (α-axis)
Fig. 9. Output power change by load connection (a-phase) (i) load side (ii) Inverter side (iii) Grid side.
그림 9. 부하연결에 따른 출력 변화 (a상) (i) 부하 측 (ii) 인버터 측 (ii)계통 측
그림 9는 계통연계시스템에 부하가 연결될 때의 인버터 측과 계통 측 출력전류 변화에 대한 시뮬레 이션 결과이다. 부하는 (a)에서 272.88[W]가 연결 되고 (b)에서 601.52[W]가 추가 연결된다. 인버터 측은 제어로 인해 부하가 연결되어도 그림 8과 같 이 일정한 전력이 출력되는 것을 (ii)에서 확인할 수 있다. 계통측은 인버터측보다 부하에서 소비하 는 전력만큼 적은 전력이 공급되는 것을 확인할 수 있다.
Fig. 10. In case of high-voltage 3-phase short circuit fault.
그림 10. 고압 측 3상 단락 사고사례
외란제거성능은 그림 10의 고압 측 3상 단락사고 를 가정하여 제어기의 성능을 확인하였다. 저압 측 에 계통연계형인버터가 변압기를 거쳐 고압 측 계 통과 연결된 것을 볼 수 있다. 고압 측 사고 시 고 압 측과 저압 측 전압변화는 그림 10에서 확인할 수 있다. 그림 11-(a)에서 a, b, c는 정상상태에서
전압을 나타내고 p.u법을 이용하여 표기하였다. 단 락사고가 일어난 후 전압은 a', b', c'이며 사고 전 전압크기의 20[%]로 전압강하가 일어난 것을 확인 할 수 있다.
(a) 고압 측 (b)저압 측
Fig. 11. Voltage vector diagram in case of high voltage side 3-phase short circuit fault
(a) High voltage side (b) Low voltage side.
그림 11. 고압측 3상 단락 사고 시 전압 벡터도
그림 10에서 Y-Δ결선 변압기에 의해 저압측은 고압측보다 30[deg] 위상이 느리게 나타나고, 사고 시 전압크기는 정상상태의 20[%]가 되는 것을 확 인할 수 있다.
그림 12은 계통전압이 0.1[sec](a)에 전 출력의 20[%]
로 전압이 낮아졌다가 0.2[sec]에 80[%]로 복구된 경우 상전압을 보여준다.
Fig. 12. Grid phase voltage and output current (α-axis) in case of grid fault.
그림 12. 계통 사고 시 계통 상전압과 출력전류 (α-axis)
계통전압이 변화함에 따라 출력되는 전류의 과도 상태가 나타나는데 자세한 그림은 그림 11에서 확 인할 수 있다.
Fig. 13. Output current in case of (a) when grid fault occurs and (b) when grid fault is recovered.
그림 13. 계통 사고 시 출력전류
(a) 계통사고 발생 시 (b) 계통사고 복구 시
계통사고발생 시의 과도상태를 나타내는 그림 13-(a) 에 보이는 바와 같이 기존제어방법에 비하여 제안 하는 제어방법의 과도상태 전류변화량이 35[%] 적 은 것을 시뮬레이션을 통하여 확인하였다. 계통사 고 복구 시의 과도상태를 보여주는 (b)의 경우는 기존제어방법에 비하여 제안하는 제어방법의 과도 상태 전류변화량이 31[%] 적게 나타난 것을 확인 하였다.
Ⅲ. 결론
본 논문에서는 정지좌표계에서 PI제어기를 사용 하여 발생하는 정상상태오차 및 위상지연을 전향 보상기를 추가하여 오차를 개선하는 제어기법을 제안하였다. 또한, 계통사고 시 GCI 시스템 보호를 위하여 외란을 측정하고 외란을 제거함으로써 동 강성을 향상시키는 방법을 제안하였다. 제안된 제 어는 근궤적, 보드선도를 통해 이득을 선정하고, 시 뮬레이션을 통하여 기존 정지좌표계 PI제어기에 비해 성능이 향상되었음을 확인하였다.
References
[1] S. N. Singh, J. Ostergaard and N. Jain,
“Distributed Generation in Power Systems: An Overview and Key Issues,” In 24rth Indian
Engineering Congress, 2009.
[2] J. Rocabert, A. Luna, F. Blaabjerg and P.
Rodríguez, “Control of power converters in AC microgrid,” IEEE Transactions on Power Electronics, Vol.27, No.11, pp.4734-4749, 2012.
DOI: 10.1109/TPEL.2012.2199334
[3] E. Twining and D.G. Holmes, “Grid current regulation of a three-phase voltage source inverter with an LCL input filter,” IEEE Transactions on Power Electronics, Vol.18, No.3, pp.888-895, 2003.
DOI: 10.1109/TPEL.2003.810838
[4] R. Kadri, Jean-Paul Gaubert and G. Champenois,
“An Improved Maximum Power Point Tracking for Photovoltaic Grid-Connected Inverter Based on Voltage-Oriented Control,” IEEE Transactions on Industrial Electronics, Vol.58 , No.1, pp.66-75, 2011. DOI: 10.1109/TIE.2010.2044733
[5] L. Ma, A. Luna, J. Rocabert, R. Munoz, F.
Corcoles and P. Rodriguez, “Voltage feed-forward performance in stationary reference frame controllers for wind power applications,” in Proc. 2011 Int.
Conf. IEEE Power Engineering, Energy and Electrical Drives (POWERENG), pp.1-5, 2011.
DOI: 10.1109/PowerEng.2011.6036416
[6] N. B. Lai and K. H. Kim, “An Improved Current Control Strategy for a Grid-Connected Inverter under Distorted Grid Conditions,” Energies, Vol. 9, p.190, 2013. DOI: 10.3390/en9030190
[7] K. D. Young, V. I. Utkin, U. Ozguner, “A control engineer’s guide to sliding mode control,” IEEE Transactions on Control Systems Technology, Vol.7, No.3, pp.328-342 19990 DOI: 10.1109/87.761053 [8] P. Cortes, M. P. Kazmierkowski, R. M. Kennel, D. E. Quevedo and J, Rodriguez, “Predictive Control in Power Electronics and Drives,” IEEE Transactions on Industrial Electronics, Vol.55, No.12, pp.4312- 4324, 2008. DOI: 10.1109/TIE.2008.2007480
[9] D. Chen, J. Zhang and Z. Qian, “An Improved Repetitive Control Scheme for Grid-Connected Inverter With Frequency-Adaptive Capability,”
IEEE Transactions on Industrial Electronics, Vol.60, No.2, pp.814-823, 2013.
DOI: 10.1109/TIE.2012.2205364
[10] F. Blaabjerg, R. Teodorescu, M. Liserre and A. V. Timbus, “Overview of control and grid synchronization for distributed power generation systems,” IEEE Transactions on industrial electronics, Vol.53, No.5, pp.1398-1409, 2006.
DOI: 10.1109/TIE.2006.881997
[11] X, Zhao and L, Chang, “Active and reactive power decoupling control of grid-connected inverters in stationary reference frame,” Chinese Journal of Electrical Engineering, Vol.3, No.3, pp.18-24, 2017. DOI: 10.23919/CJEE.2017.8250420
BIOGRAPHY
Seonghyeon Kim (Member)
2017:BS degree in Electrical Engineering, Kyungnam University.
2017~Present:Graduate student in Department of Electrical Engineering, Jeonbuk National University.
Jae Suk Lee (Member)
2006:BS degree in Electrical Engineering, Inha University.
2009:MS degree in Electrical Engineering, the University of Wisconsin-Madison.
2013:PhD degree in Electrical Engineering, the University of Wisconsin - Madison.
2014~2015:Electrical Engineer, General Electric global research, USA
2015~2017:Assistant Professor in Department of Electrical Engineering, Kyungnam University 2017~Present:Assistant Professor in Department of Electrical Engineering, Jeonbuk National University
![Fig. 2. A block diagram of the conventional GCI current control algorithm. 그림 2. 기존 PI전류제어 알고리즘 블록선도 그림 2의 시스템에서 전류의 지령은 정지좌표계 에서의 계통 전압과 전류를 이용한 유효 및 무효 전력 계산방법을 이용하여 생성하였다[11]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5622924.499133/3.892.464.802.145.355/conventional-pi전류제어-알고리즘-블록선도-시스템에서-정지좌표계-계산방법을-생성하였다.webp)
