TACAN을 위한 디지털 회로의 FPGA 구현
종신회원 서 영 호*, 정회원 최 현 준**, 종신회원 김 동 욱*
FPGA Design of Digital Circuit for TACAN
Young-Ho Seo* Lifelong Member, Hyun-Jun Choi** Regular Member, Dong-Wook Kim* Lifelong Member
요 약
본 논문에서는 항공기와 지상국 사이의 방위정보와 거리를 측정하는 전술항공운행 장비인 TACAN(tactical air navigation)을 위한 디지털 회로를 FPGA로 구현하였다. TACAN의 신호처리를 위한 모든 기능을 하나의 FPGA에 집적하여 구현하였다. 제안한 하드웨어는 입력 인터페이스, 레지스터 파일, 디코더, 신호 발생기, 그리고 주 제어 기로 구성된다. 구현한 하드웨어는 TACAN이 요구하는 방위정보를 위한 펄스쌍 그룹을 생성하는 기능과 거리를 측정하기 위한 항공기 응답 기능을 모두 포함하고 있고, 그 밖에 지상국의 ID를 제공하는 기능 등을 모두 포함하 였다. 제안한 하드웨어는 ALTERA의 FPGA를 이용하여 구현하였고, 7,071개의 logic element를 사용한다.
Key Words : TACAN, tactical ari navigation, FPGA, azimuth, distance
ABSTRACT
In this paper, we implemented a digital circuit which is targeted on FPGA for estimating azimuth information and distance between aircraft and ground station. All functions for signal processing of TACAN were integrated into a FPGA. The proposed hardware consists of input interface, register file, decoder, signal generator and main controller block. The designed hardware includes a function to generating pulse pair group for azimuth information, a function to responding the interrogation of aircraft for estimating distance between aircraft and ground station, and a function to provide ID information of ground station. The proposed hardware was implemented with FPGA chipset of ALTERA and occupied with 7,071 logic elements.
※ 이 논문은 2010년도 광운대학교 교내 학술연구비 지원에 의해 연구되었음.
* 광운대학교 (yhseo/[email protected]), **안양대학교 정보통신공학과([email protected]) 논문번호:KICS2010-07-293, 접수일자:2010년 7월 3일, 최종논문접수일자 : 2010년 11월 11일
Ⅰ. 서 론
최근 군용 장비로 각광을 받고 있는 TACAN (tactical air navigation)은 항공기와 지상국의 방위와 거리를 추정하기 위한 항법 장비의 일종이다. 원래는 군용항공기의 단거리(200∼300 mile) 항법 지원용으 로 개발되었다. 비행하고 있는 항공기에 탑재된 TACAN 장비에서 지상국의 TACAN의 채널을 맞추 면 자동으로 지상국에 전파가 보내어진다. 또한 지상 국의 응답신호에 의해 방위와 거리가 동시에 항공기
의 지시기에 나타나게 되어 현재의 비행 위치를 알 수 있다[1,2].
원래 미국 해군이 함재기의 귀함용 호밍비컨으로서 항공모함에 설치하기 위해 개발한 것이다. 종래의 전 방향식으로서는 안테나의 크기와 설치장소의 제한으 로 함상에 설치할 수 없다는 것이 이 장치를 개발하게 된 이유이다. 이와 같이 TACAN은 군용항법원조시설 로서 개발되었지만, 오늘날 국제민간항공기구(ICAO) 에서도 거리정보 부분을 DME (distance measuring equipment)의 표준방식으로서 정식으로 채택하고 있
다. 설치 조건 동작원리가 VOR(very high frequency omnidirection radio range)과 거의 같기 때문에 VOR 과 같은 장소에 설치되어 VOR-TACAN국으로 운용 되기도 한다. 이는 군과 민간이 함께 이용할 수 있는 데 군용기에 대해서는 TACAN에 의해서 거리와 방위 의 정보를 제공하고, 민간항공기에 대해서는 VOR에 의해서 방위정보가 제공된다[3].
TACAN은 종래의 거리 측정장치인 DME와 VHF 옴니레인지인 VOR과 같이, 항공기에 거리와 방위를 알려주기 위한 장치라는 점에서는 동일하다. 그러나 거리정보 부분과 방위정보 부분을 분리하지 않고 통 합되어 있는 것이 특징이다. DME와 VOR은 각기 다 른 주파수를 사용하고 있으나, TACAN 방식에서는 동일 주파수를 사용하고 거리정보와 방위정보를 펄스 코드에 의해서 구별하며, 채널 구성은 주파수에 의존 하고 있다. 따라서 종래의 방식에 비해 방해전파의 영 향을 적게 받고, 측정오차도 작다. 또한 설치장소의 지형에 따른 영향도 감소되어 설치하기가 쉽다. 장치 의 용적이 소형화하고 지상장치의 동작도 안정되는 등의 많은 장점이 있다[3-5].
현재 우리나라에서 사용되고 있는 TACAN 장비는 거의 모두 외산 제품에 의존하고 있는 실정이다. 최근 개최된 방위사업청의 정책기획분과위원회에서는 이동 형 TACAN 사업추진기본전략으로 차기국지방공레이 더 사업추진기본전략을 수정하였다. 이동형 TACAN 사업추진기본전략 수정은 1970년대에 도입되어 수명 이 초과된 노후한 이동형 TACAN 장비를 신형으로 교체하기 위한 구매 사업으로, 공군에 배치되어 전․
평시 각종 작전/훈련 시 임무 항공기에 항법 정보를 제공하는 장비를 2007년 국외구매로 사업추진방법이 결정되어 사업을 추진하여 왔으나, 금회 정책∙기획분 과위에서 국내구매로 변경토록 사업추진전략을 수정 하였다고 방위청이 밝혔다.
방위사업청이 업체 및 장비를 도입 추진 사업을 수 정한 배경에는 성공적으로 추진할 경우 국외 구매에 비해 안정적으로 후속군수지원이 가능하고 해외 수출 에도 기여할 수 있기 때문이다. 이를 통해 우리나라의 국지방공능력을 크게 향상시키고 실시간 동시 통합 방공작전 수행이 가능해짐은 물론 고용증대 효과 및 해외 수출 경쟁력 확보도 가능할 것으로 보고 있다[5].
이러한 사회적인 요구에 맞추어 국내에서는 거의 연구가 이루어지지 않고 있던 TACAN관련 분야에 대 한 연구가 활발히 이루어질 것으로 기대되고 있다. 특 히 TACAN 장비의 핵심 신호처리 기술은 디지털 신 호처리 기술 및 디지털 회로를 이용하여 구현되는데,
현재까지 TACAN의 디지털 처리를 위한 연구는 거의 이루어지지 않고 있다. 대부분의 연구는 RF적인 관점 에서 안테나의 개발이나 수신된 RF 안테나 신호의 분 석에 치우쳐 있다[6,7]. 본 논문에서는 TACAN의 신호 처리를 위한 디지털 회로를 FPGA를 이용하여 단일 전용 칩으로 구현하였다. TACAN은 디지털과 RF 시 스템으로 구성되는데 RF 시스템에 대한 내용은 본 논 문의 범위에 포함되지 않는다.
본 논문은 다음과 같이 구성된다. 2장에서는 TACAN의 기본적인 동작에 대해서 살펴보고, 3장에 서는 제안한 하드웨어 구조에 대해서 설명한다. 4장에 서는 구현결과를 보이고, 5장에서 결론을 맺는다.
Ⅱ. TACAN의 동작
본 장에서는 표준안[8]을 바탕으로 하여 TACAN의 개략적인 규격 및 기능에 대해서 살펴본다. TACAN 은 크게 두 가지 기능으로 구성되는데, 첫 번째는 항 공기와 지상 무선국사이의 거리를 측정하는 것이고, 두 번째는 회전 지향성 안테나를 이용하여 항공기의 방위 정보를 얻는 것이다. 거리측정과 방위기능은 동 일한 안테나를 사용하여 모든 정보를 송신 및 수신 한 다. TACAN의 사용 주파수대역은 962MHz에서 1,213MHz이며, 지상 무선국으로부터 370Km이내의 항행중인 항공기와의 거리정보 및 방위정보를 제공할 수 있다. TACAN에서 사용되는 주파수대역은 1MHz 단위로 나누어져 252개의 채널을 구성하고 126개의 X 채널과 126개의 Y 채널로 나누어진다. 송/수신 쌍 은 상호 혼신을 막기 위해 서로 63MHz 떨어져 구성 된다[4,8].
2.1 방위 정보
항공기는 지상 무선국에서 송신된 기준신호의 시간 간격과 지상 무선국에서 발생된 15Hz, 135Hz의 변조 주파수의 위상을 비교해 방위정보를 계산한다. 방위를 결정하기 위해 항공기 탑재장비는 지상 무선국으로부 터 수신된 15Hz의 변조신호를 복조하고, 15Hz의 기 준신호를 수신하여 위상을 구한다. 위상 차이를 구하 기 위해서 지상 무선국은 15Hz 변조신호가 회전 하는 동안 특정한 위치에서 15Hz 기준 신호를 송출한다.
처음 복조된 신호와 기준신호의 복조신호 사이의 위 상차이를 이용하여 위치를 결정할 수 있다. 135Hz 변 조신호는 방위정보를 더욱 정밀하게 측정하기 위해 사용된다. 15Hz에 비해 135Hz는 9배 빠른 주파수이 므로 9배의 높은 정밀도를 가질 수 있다.
그림 2. 펄스쌍 송수신 및 지연시간
Fig. 2. Pulse pair transponder and system delay
그림 3. 펄스 규격 Fig. 3. Pulse specification
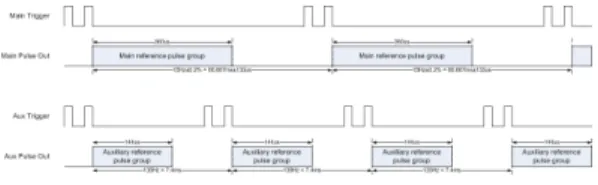
이와 같은 동작을 위해서 디지털 시스템은 안테나 로부터 생성된 트리거 신호에 따라서 약속된 펄스쌍 (pulse pair)을 만들어 출력해야 한다. 표준안을 살펴 보면 3개의 트리거 신호가 존재하는데 이 중에서 ID 인식을 위한 트리거를 제외하고 2개의 트리거를 방위 정보를 위한 출력을 동기화하는데 이용한다[8]. 2개의 트리거는 main reference trigger(이하 MAIN 트리거) 와 auxiliary reference trigger(이하 AUX 트리거)인데 각각 main reference pulse group과 auxiliary reference pulse group이라는 펄스쌍의 열을 출력한다.
각 펄스그룹은 그림 1과 같이 정의된다[8].
그림 1. 트리거 신호 및 출력 펄스 그룹 Fig. 1. Trigger signal and output pulse group
2.2 거리 정보
거리정보는 항공기와 지상 무선국 간에 주고 받은 펄스쌍의 시간차로 결정된다. 이러한 원리를 그림 2에 나타냈다. 항공기가 지상 무선국의 TACAN에 신호 (Input Pulse Pair)를 보내면 지상 무선국은 서로 약속 된 지연시간(system delay) 이후에 출력신호(Output Pulse Pair)를 항공기에게 보내준다. 이 출력신호는 대 기를 거치면서 지연되어 항공기에 도달될 것이고, 이 때 발생한 시간차이로 인해서 거리를 계산할 수 있는 것이다[8].
그림 2와 같이 펄스쌍은 두 개의 펄스로 구성되는 데 각 펄스는 표준안에 따라서 규격이 정확히 지켜져
야만 한다. 펄스의 규격을 그림 3에 나타냈는데, RF 시스템의 특성을 반영한 것으로 비대칭의 가우시안 형태를 갖는다[8].
2.3 기타 동작
TACAN은 항행하는 항공기가 교신하고 있는 장비 의 고유 ID를 인식할 수 있도록 identification signal 을 정의하고 있다. 다른 트리거 신호와 마찬가지로 안 테나로부터 트리거 신호가 주어지면 그와 동기하여 펄스쌍을 발생시킨다. 이 펄스쌍을 그대로 출력으로 이용하는 것은 아니고 이 펄스쌍에 동기를 맞추어 모 르스 코드와 유사한 비콘 코드(beacon code)를 전송 한다[8]. 출력되는 펄스쌍이 60μs 동안 없는 구간(dead time)이 발생하면 출력되는 RF 신호의 형태를 연속적 으로 유지하기 위하여 스퀴터 신호(squitter signal)라 는 무의미한 신호를 발생한다[8].
그림 4. ID 확인을 위한 트리거 Fig. 4. Identification triggering scheme
Ⅲ. 제안한 하드웨어 구조
본 장에서는 제안한 TACAN용 디지털 시스템의 하드웨어 구조에 대해서 자세히 설명한다.
3.1 시스템의 구성
FPGA 주요 기능은 크게 세 가지로 나눌 수 있다.
첫 번째는 트리거 입력(MAIN 트리거, AUX 트리거, IDEN 트리거)에 대해 정해진 펄스쌍 그룹을 발생하 는 것이고, 두 번째는 항공기로부터 입력된 펄스쌍 신 호에 대해 정해진 출력을 발생하는 기능이다. 세 번째 는 일정시간(dead time)동안 무입력시 스퀴터 신호를 출력하는 기능이다.
이러한 주요 기능을 구현하는데 있어서 필수적인 FPGA 동작 요구사항은 세 가지가 있는데 첫 번째는 모든 출력 신호의 delay, duration, 및 space가 조절되 어야 하고, 두 번째는 입력 신호를 분석하기 위해 내 부적인 파라미터들을 조절할 수 있어야 한다. 마지막 으로 RF 시스템의 개발을 위해 테스트 동작 모드를 가져야 한다.
TACAN용 FPGA의 입출력 포트는 그림 5와 같다.
그림 2의 입력 신호는 AD 변환기를 거치면서 디지털 신호로 변화되어 FPGA로 입력되고, 출력신호는 DA
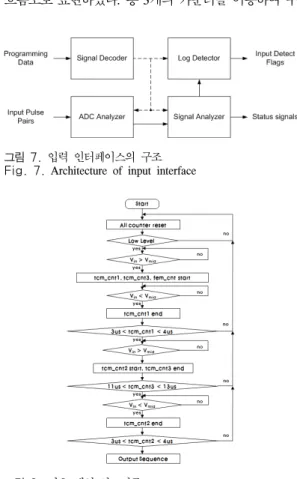
그림 7. 입력 인터페이스의 구조 Fig. 7. Architecture of input interface
그림 8. 신호 해석 알고리즘 Fig. 8. Signal analyzing algorithm 그림 5. FPGA 입출력
Fig. 5. In/output of FPGA
그림 6. FPGA 전체 구조 Fig. 6. Top architecture of FPGA
변환기를 거쳐서 가우시안 형태의 아날로그 신호로 변환된다. 입력 신호의 규격에 따라서 10Mhz를 표본 화 주파수로 사용했다. 그러나 생성되는 가우시안 출 력신호는 정교하게 만들어져야 하기 때문에 내부적으 로 200Mhz로 신호를 이용한다.
TACAN FPGA는 세 개의 트리거 신호와 input pulse pair 신호가 입력되면 각 입력 별로 정해진 출력 을 내보내는 동작을 수행한다. 세 개의 트리거 신호들 은 일정한 간격으로 발생하기 때문에 트리거들간에는 우선순위가 존재한다. 세 개의 트리거 신호는 일정하 게 입력되기 때문에 우선순위를 처리하기가 용이하다.
그러나 input pulse pair 신호는 무작위적인 신호이므 로 트리거 신호들과의 우선순위가 중요하다. 또한 일 정시간(deadtime) 동안 입력신호가 없으면 squitter라 는 무의미한 신호를 발생한다. 각 입력 신호들간의 동 작적인 우선 순위는 MAIN 트리거, AUX 트리거, IDEN 트리거, Input Pulse Pair, 그리고 Squitter의 순 이다.
FPGA를 이용하여 운용할 수 있는 동작 모드는 실 제로 세 가지로 구성하였다. 정상적인 동작모드는 정 상모드(normal mode)이고 수신모드(input mode)와 테스트모드(test mode)는 TACAN의 개발과정에서 각 각 수신기와 송신기를 테스트하기 위해 운용되는 모 드이다. 실제로 TACAN 장비를 개발할 때에는 이러 한 세 개의 모드 이외에 몇 가지 모드를 더 추가하여 사용한다.
3.2 FPGA 구조
FPGA의 전체구조는 그림 6과 같고, 입력 인터페이 스(Input Interface), 레지스터 파일(Register File), 신 호 생성기(Signal Generator), 디코더(Decoder), 및 주 제어기(Main Controller) 등으로 구성된다. 주요 블록 들에 대해서 아래에 설명한다.
입력 인터페이스는 ADC를 거쳐서 입력된 12비트 의 input pulse pair를 트리거 형태의 신호로 변환하는 동작을 수행한다. Input pulse pair 뿐만 아니라 유효 신호 flag(signal_valid) 신호를 동시에 판단하여 input pulse pair 신호의 유효성을 나타내는 트리거 형태의 신호를 발생한다. 입력 인터페이스의 구조를 그림 7에 나타냈다.
입력 인터페이스 블록에서 신호 해석기(signal analyzer)는 가장 핵심적인 블록으로써 입력된 신호들 이 유효한 신호인지 분석하고 판단하는 기능을 수행 한다. 신호의 유효성을 판단하는 알고리즘을 그림 8에 흐름도로 표현하였다. 총 3개의 카운터를 이용하여 두
그림 11. 주제어기의 구조
Fig. 11. Architecture of main controller
그림 9. 신호생성기의 구조
Fig. 9. Architecture of signal generator
그림 10. 가우시안 출력 Fig. 10. Gaussian output
개의 펄스에 대한 duration과 두 펄스 사이의 space를 측정하고, 비교기를 이용하여 오차범위에 포함되는지 를 판단하여 최종적으로 신호의 유효성 여부를 판단 한다. 즉, 그림 2와 그림 3의 조건을 만족하는지 오차 범위를 고려하여 판단하는 것이다.
그림 10의 신호 생성기 블록은 FPGA의 동작 모드 에 따라서 정의된 출력 펄스를 생성하는 기능을 담당 한다. 출력될 데이터가 이미 정해져 있기 때문에 출력 펄스를 생성하는 것은 프로그래밍된 지연시간을 지난 후에 카운터를 통해서 내부에 저장된 값들을 순차적 으로 읽어 들인 후에 이들을 외부로 출력시키는 동작 을 수행한다.
가우시안 생성기(Gaussian Generator)는 가우시안 파형을 생성하기 위해사 FPGA의 내부 ROM을 사용 한다. ROM에 DAC로 출력될 가우시안 파형의 값들 을 저장한 후에 순차적으로 이 값들을 출력시킨다.
가우시안을 위한 ROM의 주소는 9비트이고, 500개 의 값이 저장되어 있다. 50MHz의 속도로 ROM으로 부터 값을 읽어 오기 때문에 하나의 가우시안 파형은 10us의 시간단위로 생성될 수 있다.
가우시안 파형의 형태는 표준에 정의된 모든 조건 을 만족하고 있고, 송신기의 특성에 따라서 그림 11과 같이 11가지 형태(계열1~계열11)로 프로그래밍이 가 능하다. 또한 최적화된 송신 상태를 도출할 수 있도록 128단계로 가우시간 크기를 프로그래밍할 수 있도록 설계되었다.
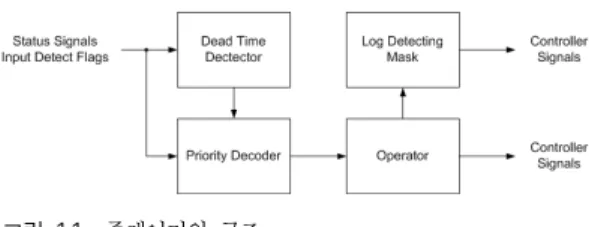
주 제어기(Main Controller)는 전체적인 FPGA의 동작을 관장하는 블록으로, 그림 11에 구조를 나타냈 다. 입력인터페이스를 거친 트리거 신호들의 우선 순
위를 따져서 어떠한 펄스쌍 그룹이 출력되어야 하는 지 결정된다. 또한 동작 사이에 dead time을 찾아서 squitter 동작을 수행시킨다.
그 밖에 프로그래밍 레지스터 파일은 직렬 입력을 병렬로 변환하는 블록, DeMUX, 다수 개의 레지스터, MUX, 그리고 병렬 출력을 직렬 출력으로 변환하는 블록으로 구성된다. 쓰기 모드에서는 직렬로 입력된 신호는 병렬로 변환된 후에 주소와 데이터가 분리되 어 주소는 DeMUX의 선택신호가 되고 데이터는 DeMUX의 입력이 된다. 주소, 즉 선택신호에 의해 선 택된 레지스터에 데이터가 저장되고, 저장된 데이터는 FPGA 내부에 정보를 전달하여 동작에 영향을 미치게 된다. 읽기 모드에서는 주소가 MUX의 선택신호가 되 어서 선택된 레지스터의 값을 MUX를 통해 출력시키 고, 이 병렬 데이터를 직렬로 변환하여 FPGA 외부로 출력시킨다.
Ⅳ. Experimental Results
본 논문에서는 VHDL를 이용하여 TACAN을 위한 디지털 회로를 설계하였다. 타겟 디바이스는 Altera사 Cyclone 계열의 EP1C12QFP240I를 사용하였다. 구 현된 회로는 7,071개의 logic element를 사용하고 78,848개의 memory bit를 사용한다. 내부 PLL은 1개 를 사용하였다.
4.1 프로그래밍
RF 시스템과 연동하는 디지털 시스템을 구현할 경 우에 디지털 시스템의 프로그래머블한 동작은 매우 중요하다. TACAN과 같이 거리측정을 위해 지상 무 선국의 시스템 지연시간이 명확해야 할 경우에는 더 욱 그러하다. RF 시스템의 지연시간은 정확히 조절하 기 어렵고, 정확히 조절할 수 있다 하더라도 많은 노 력이 필요하기 때문에 디지털 시스템에서 시스템 지 연시간 등을 조절할 수 있게 해주는 것은 필수적인 요 소이다. 또한 RF 시스템 및 운용 환경에 따른 변위 요 소들에 적응적으로 동작할 수 있게 하기 위해서도 디 지털 시스템의 프로그래머블한 기능은 매우 중요한
그림 13. TACAN FPGA의 전체 합성도 Fig. 13. Top synthesis result of TACAN FPGA
그림 14. 입력 인터페이스의 구현결과
Fig. 14. Implementation result of input interface 요소이다. 본 논문을 통해서 구현한 하드웨어는 모든
동작을 프로그래머블하게 하였고, CPU에 의해서 자 동 및 수동으로 조절될 수 있다. CPU, GUI, 및 프로 그래밍을 위한 자세한 설명은 본 논문의 초점을 벗어 나기 때문에 생략하였다. 그림 12에 동작 중에서 프로 그래밍이 가능한 요소들에 대해서 나타냈다.
그림 12. 프로그래밍 요소 Fig. 12. Programming element
4.2 하드웨어 구현 결과
그림 13에서 그림 16은 3장에서 제안한 하드웨어 구조를 구현한 결과를 나타낸다. 3장에서 보인 각 블 록별 하드웨어 구조는 이해를 돕기 위해 간략히 나타 낸 것이고, 실제 구현결과를 살펴보면 각 블록들의 명 확한 구조를 볼 수 있다.
그림 14의 입력 인터페이스에서는 2개의 ADC 분 석기와 8개의 신호해석기가 사용되는 것을 볼 수 있 다. 항공기로부터 입력되는 신호 뿐만 아니라 그에 따 라 출력되는 가우시안 신호를 다시 분석하여 시스템 의 동작(신호의 형태 및 시스템 지연)을 확인하기 위 해 2개의 ADC 분석기가 필요하다. 또한 여러 트리거 신호들, 입력 신호들, 그리고 입력 신호의 유효성을 나타내는 신호들을 모두 분석하기 위해 다수 개의 신
호해석기가 사용된다.
그림 15의 신호 생성기를 살펴보면 각각 5개의 지 연제어기와 펄스생성기가 있는 것을 확인할 수 있다.
각각의 출력신호들은 RF 시스템을 구동시키는데 사 용된다. 또한 1개의 가우시안 생성기가 구현되어 가우 시안 파형을 생성한다. 앞서 설명한 것과 같이 FPGA 에서 제공하는 내부 ROM으로 구현되었다.
그림 16의 주 제어기의 형태는 3장에서 설명한 주 제어기의 형태와 거의 유사한 형태로 구현되어 있다.
그림 15. 신호 생성기의 구현결과
Fig. 15. Implementation result of signal generator
그림 16. 주제어기의 구현 결과
Fig. 16. Implementation result of main controller
4.3 시뮬레이션 결과
그림 17에서 19에는 대표적인 시뮬레이션 결과 중 일부를 보여주고 있다. 그림 17은 방위정보를 알려주 기 위해서 MAIN 트리거(main_trig)와 AUX 트리거
그림 17. 방위정보를 위한 트리거 동작
Fig. 17. Trigger operation for azimuth information
그림 18. 거리측정을 위한 동작
Fig. 18. Transponder operation for estimating distance
그림 19. 테스트 모드 동작 Fig. 19. Test mode operation
(aux_trig)에 따라서 펄스쌍 그룹이 출력되는 것을 보 여주고 있다. 그림에서 hpa_gm이 가우시안 출력에 해 당한다. 그림 18은 거리측정을 위해서 항공기로부터 신호가 입력되면 입력 인터페이스를 거치면서 유효한 형태인지 분석된 후에, 유효하다고 판단되면 그 정보 를 주 제어기에 넘겨주어 우선순위 등의 현재 시스템 조건을 분석한다. 분석결과 항공기로부터 송신된 신호 에 대해서 응답할 수 있는 조건이 확인되면 log_
video_flag_test 신호를 신호 생성기 블록에 전달하여 그림 18과 같이 펄스쌍을 출력한다. 그림 18에서는 시 뮬레이션 결과의 관찰을 용이하게 하기 위하여 시스 템 지연을 생략하였다. log_video_flag_test 신호가 입 력되면 일정 시간(동작을 위한 지연시간) 이후에 펄스 쌍이 출력되는 것을 확인할 수 있다. 그림 19는 RF 시 스템을 테스트하기 위한 테스트 모드동작의 시뮬레이 션 결과이다. 이러한 테스트 모드 동작을 이용하여 RF 시스템이 최적화된 출력을 발생할 수 있도록 RF 회로 를 튜닝한다.
Ⅴ. Conclusion
본 논문에서는 TACAN을 구성 요소 중 디지털 회 로 부분을 FPGA를 이용하여 단일 칩으로 구현하였 다. TACAN 장비라는 것이 RF 시스템와 안테나 등 여러 시스템으로 구성되지만 본 논문은 디지털 회로 부분만 국한하여 논의하였다.
TACAN 장비가 널리 사용되고 있지만 최근까지 군용에만 국한되어 사용되고 있었고, 국내에서는
100% 수입 제품에 의존하고 있기 때문에 국내의 연 구 및 구현 사례가 많지 않아서 초기 개발 시에 자료 부족 등의 많은 어려움이 있었던 것이 사실이다. 작년 말부터 정부기관이 TACAN 장비를 국산화하겠다고 발표를 한 이후에 TACAN에 대한 전반적인 관심도가 높아지면서 관련 연구 및 개발도 활성화될 것으로 보 인다.
TACAN에 대한 국내의 연구사례를 찾아보기 어렵 고, 특히 디지털 회로에 대한 부분은 전무하기 때문에 본 논문에서 제안한 구조와 구현 결과를 다른 사례와 비교하기 어려웠다. 본 연구는 추후에 개발될 많은 TACAN 연구에 좋은 구현 사례가 될 수 있기를 기대 한다.
참 고 문 헌
[1] Garfield, W.L., “TACAN: a navigation system for aircraft”, Proceedings of the IEE - Part B:
Radio and Electronic Engineering, Vol.105, Issue9, Part S, pp.298-306, 1958
[2] 윤정호, 항공정보통신공학, 교학사, 2009. 01.
[3] http://www.worldlingo.com/ma/enwiki/ko/Tacti cal_Air_Navigation#Operation, 전술상 항공술 [4] 건설교통부 항공안전본부, 항행안전시설의 비행
점검 이론과 실제(1) : 전방향표지시설/거리측정 시설/전술항행표지시설, 2005.
[5] DCN News, 제55회 정책․기획분과위원회 개최 결과 이동형 TACAN 사업추진기본전략 수정 (안) 등, http://dcn.or.kr/66344
[6] Zhang Bin and Wang Wei-kang, "Research on Accurate Measurement Method of TACAN Azimuth Based on Curve Fitting", Wireless Communications, Networking and Mobile Computing, 2009. WiCom '09. 5th International Conference, pp.1-4, 2009.
[7] Mueller, P. and Branner, G.R., "An electronically scanned antenna array for TACAN bearing finding applications", Antennas and Propagation Society International Symposium, Vol.2, pp.872-875, 1994
[8] MIL-STD-291C, MILITARY STANDARD, STANDARD TACTICAL AIR NAVIGATION (TACAN) SIGNAL (10 FEB 1998)
서 영 호 (Young-Ho Seo) 종신회원 1999년 2월 광운대학교 전자재
료공학과 공학사
2001년 2월 광운대학교 공학석 사
2000년 3월~2001년 12월 인티 스닷컴(주) 연구원.
2004년 8월 광운대학교 공학박사 2003년 6월~2004년 6월 한국전기연구원 연구원 2004년 12월~2005년 8월 유한대학 연구교수 2005년 9월~2008년 2월 한성대학교 조교수 2008년 3월~현재 광운대학교 조교수
<관심분야> 2D/3D 영상 및 비디오 처리, 디지털 홀로그램, SoC 설계, 워터마킹/암호화
최 현 준 (Hyun-Jun Choi) 정회원
2003년 2월 광운대학교 전자재 료공학과(공학사)
2005년 2월 광운대학교 전자재 료공학과(공학석사)
2009년 2월 광운대학교 전자재 료공학과 박사
2009년 3월~2009년 8월 광운 대학교 실감미디어 연구소 박사후 연구원 2009년 9월~2010년 2월 광운대 실감미디어 연구
소 연구교수
2010년 3월~현재 안양대학교 정보통신공학과 조교수
<관심분야> Image Processing, 디지털 홀로그램, 디 지털 컨텐츠 보안, FPGA/ASIC 설계
김 동 욱 (Dong-Wook Kim) 종신회원
1983년 2월 한양대학교 전자공 학과(공학사)
1985년 2월 한양대학교 공학석사 1991년 9월 Georgia공과대학
전기공학과 (공학박사).
1992년 3월~현재 광운대학교 전자재료공학과 정교수 신기 술 연구소 연구원
2000년 3월~2001년 12월 인티스닷컴(주) 연구원 2009년 3월~현재 광운대학교 실감미디어연구소 연
구소장
2006년 3월~현재(사)실감미디어산업협회 이사
<관심분야> 디지털 VLSI Testability, VLSI CAD, DSP 설계, Wireless Communication