* 정회원 ․ 한양대학교 건설환경공학과 석사 (Hanyang University ․ [email protected]) ** 정회원 ․ 한양대학교 건설환경공학과 박사과정 (Hanyang University ․ [email protected]) *** 정회원 ․ 한양대학교 건설환경공학과 박사과정 (Hanyang University ․ [email protected])
**** 종신회원 ․ 교신저자 ․ 한양대학교 건설환경공학과 정교수 (Corresponding Author ․ Hanyang University ․ [email protected]) Received July 14, 2018/ revised July 21, 2018/ accepted July 27, 2018
Copyright ⓒ 2018 by the Korean Society of Civil Engineers
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0)
DOI: https://doi.org/10.12652/Ksce.2018.38.5.0751
www.kscejournal.or.kr
효율적 품질관리를 위한 지능형 다짐 시스템 개발
이수민*ㆍ박상일**ㆍ이리호***ㆍ서종원****
Lee, Soomin*, Park, Sangil**, Lee, Riho***, Seo, Jongwon****
Development of Intelligent Compaction System for Efficient Quality Control
ABSTRACT
Currently, the quality measurement of the work is carried out by the supervisor's visual inspection, as the workers individually judge the number of resolutions, thickness, speed and vibration. After work, we are conducting follow-up work through traditional spot test, which is less representative. Therefore, it is impossible to check the results of the resolution, and there is always the possibility that problems will arise due to poor construction. This study demonstrates the feasibility of using the continuous compaction strength measurement method by comparing the continuous compaction strength measurement method and the conventional compaction strength measurement method after performing the compaction in the actual field scale in various test conditions. The validity is verified by analyzing the Compaction Meter Value of an Intelligent Compaction roller composed of a Global Positioning System and an accelerometer, Based on the proven results, a full range of quality can be confirmed without a single test. The quality confirmation is visualized in the compaction control program developed in this study, This enables the field manager to perform real-time quality monitoring at the same time as compaction.
Key words : Continuous compaction strength measurement, GPS, Accelerometer, Intelligent compaction roller, Compaction meter Value
초 록
현재 다짐공사는 작업자가 정해진 다짐횟수, 두께, 속도, 진동여부 등을 자신의 경험에 의해 개별적으로 판단하고 감독자의 육안 검사에 의해 다 짐공사의 품질측정이 이루어지고 있으며, 작업 후 대표성이 떨어지는 재래식 다짐강도 측정방법인 일점시험(Spot test)을 통하여 후속 단계의 작업을 진행하고 있는 실정이다. 따라서 다짐작업 결과에 대한 정량적 확인이 불가능하며, 시공부실로 인한 문제점이 제기될 가능성이 상존하고 있다. 본 연구에서는 여러 가지 시험조건에서 실제 현장규모로 다짐을 수행한 후 연속 다짐강도 측정 방법과 재래식 다짐강도 측정 방법과의 비 교를 통해 연속 다짐강도 측정 방법의 사용 타당성을 입증하였다. 타당성 입증은 연속 다짐강도 측정방법인 GPS (Global Positioning System) 와 가속도계로 구성된 IC (Intelligent Compaction) 롤러의 CMV (Compaction Meter Value)를 분석하는데 있으며, 입증된 결과를 토대로 일점시험을 배제한 현장 전 범위 품질확인이 가능하다. 품질 확인은 본 연구에서 개발한 다짐공사 관제프로그램에 시각화되며, 이를 통해 현장 관리자는 다짐작업과 동시에 실시간 품질 모니터링이 가능하다.
검색어 : 연속 다짐강도 측정, GPS, 가속도계, Intelligent compaction 롤러, Compaction meter value
Construction Management
시공관리1. 서 론
다짐공사에서 지반의 역학적 특성을 고려하여 다짐 두께를 산정 하고 다짐장비의 운용을 계획하는 것은 대부분 체계적인 평가 및 관리시스템의 부재로 작업자 자신의 인위적인 판단에 의해 작업이 진행된다. 이러한 문제는 다짐 품질을 평가하기 위한 시료 채취의 위치 문제, 일점시험에 의한 대표성 문제, 시험자의 오차 및 토질 종류에 따른 역학적 특성 등 지반공학적으로 고려해야 할 중요한 요소가 많음에도 불구하고 단지 장비의 일정한 다짐횟수 에 의해 충분히 다져진다고 간과할 수 있다.
이와 같은 단점을 보완하기 위해 지난 30년 동안 유럽, 미국 등을 중심으로 연속다짐관리(CCC: Continuous Compaction Control)에 대한 연구가 활발히 진행되고 있다. 연속다짐관리 방법은 다짐시공 시 다짐평가를 동시에 연속적으로 수행할 수 있는 방법으로 진동 다짐 롤러에 가해지는 진동과 이로 인한 지반 반발력의 관례로 지반강성을 측정하는 방법이다. 이러한 연속다짐관리 기술을 적용 한 롤러를 IC 롤러라 칭하고 있으며, 외국의 경우 이미 IC 롤러에 대한 많은 시방기준들이 제시되고 있는데 대표적인 예로 스웨덴의
“ROAD94”, 오스트리아의 “Technical Contract Stipulation RVS 8S.02.6, Earthworks, Continuous Compaction Integrated Compaction- Proof (Proof of compaction)” 등이 있으며, 미국의 경우 2007년
“Compaction by IC, LFWD & Test Rolling-Pilot Specification for Embankment Grading Materials” 이 미네소타주 교통국(Mn/
DOT)에 의해 시방기준을 제시하고 있다(Kim and Park, 2010).
이외에도 유럽, 미국, 일본 등에서는 간편성, 신속성, 경제성, 접근성 등이 우수한 새로운 다짐평가장비인 지오게이지(Geogauge), 동적 콘관입시험기(Dynamic Cone Penetrometer, 이하 DCP), 동평판 재하시험기(Light Weight Falling Deflectometer, 이하 LFWD) 등을 개발하여 사용하고 있다.
IC 롤러는 GPS와 가속도계를 이용하여 위치정보와 품질정보인 CMV 를 도출하고 이를 통해 연속다짐관리, 즉, 연속 다짐강도 측정을 한다. CMV를 통한 연속 다짐강도 측정방법은 1970년에 최초로 제안되었으며, 다양한 현장 품질시험과 비교하여 가장 높은 상관관계를 보이고 있다. 따라서 지반의 다짐강도를 연속적으로 측정하는 방법에 대표적으로 사용되고 있다. IC 롤러를 통한 다짐공 사는 전 공사 지역에서 다짐이 부족한 지역을 정확히 알 수 있으며, 동일지역에 다짐횟수 및 다짐경로를 알 수 있으므로 정밀다짐 여부를 모니터링 할 수 있기 때문에 지반 품질관리에 용이하다.
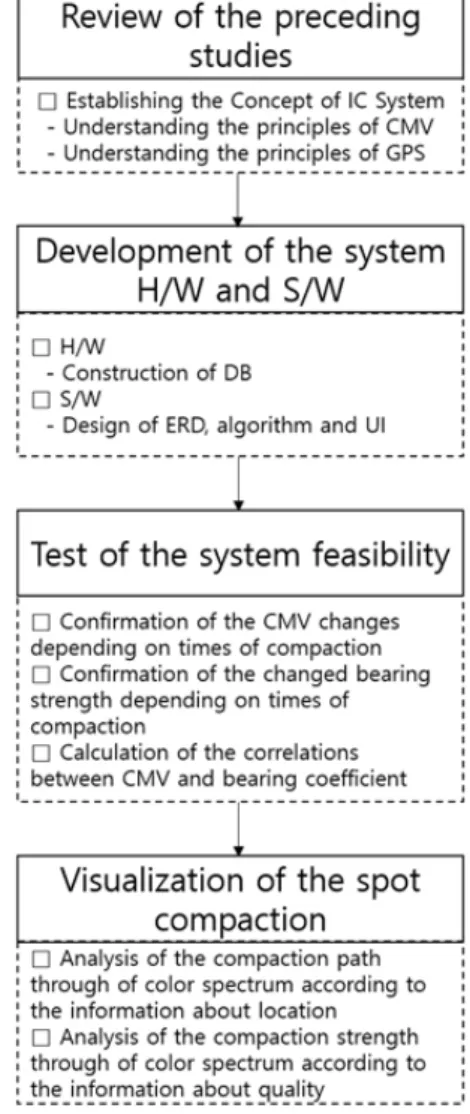
본 연구는 선행연구 조사를 통한 국내외 IC 롤러의 현황을 검토하고, 하드웨어, 소프트웨어를 개발 및 구축하였다. 현장 품질 시험과 비교하여 개발한 IC 시스템의 사용 타당성을 검증하였고, IC 시스템을 실제 토공현장에 적용하여 다짐정보(위치정보, 품질정
보)를 시각화하였다. 다짐정보의 시각화 방법으로는 국토교통과학 기술진흥원 산하 “ICT를 활용한 건설장비 관제 및 스마트 시공 기술 개발” 과제를 통해 개발된 Web-GIS 기반 토공관제프로그램 을 기반으로 하였으며, 시스템에 IC Control 기능을 추가 개발하여 현장관리자는 각각의 다짐정보를 모니터링하고 현장 다짐기준에 적합한지 분석할 수 있도록 하였다.
Fig. 1 은 본 연구의 전체 범위 및 방법을 나타낸다.
롤러의 내·외부에 GPS 컨트롤러와 가속도계를 설치한다. GPS 로부터 얻을 수 있는 NMEA-0183 (National Marine Electronics Association-0183)프로토콜 데이터와 가속도계 데이터로거로부 터 얻을 수 있는 시간당 가속도 데이터를 DB (Data Base)화 한다.
Web-GIS 기반 토공관제프로그램에 추가 ERD (Entity Relationship Diagram) 작성 및 시스템 알고리즘을 설계하고 IC 롤러를 컨트롤 할 수 있는 UI (User Interface)를 구성한다. NMEA-0183 표준에 서 제시하는 여러 데이터 규격 중 GGA 포맷을 통해 위도, 경도,
Fig. 1. Scope and Method of IC System Research
및 시간 정보를 추출하고, 가속도 데이터를 FFT (Fast Fourier Transform) 하여 시간, CMV 정보를 추출함과 동시에 해당 정보를 매치시켜 GIS 맵 상에 표시한다.
개발 결과의 검증을 위하여 두 곳의 시험 장소를 선정하고 시스템 타당성 검증 테스트를 실시한다. 타당성 검증 테스트를 위하여 다짐 횟수에 따른 CMV의 변화와 다짐 횟수에 따른 현장 품질시험 값(지지력계수)의 변화를 확인하고 CMV와 현장 품질시험 값과의 상관관계를 비교한다. 또한, 개발 된 시스템을 활용하여 롤러의 다짐정보를 GIS-Web 상에 시각화한다.
2. 이론적 고찰
2.1 Intelligent Compaction Roller
IC 롤러는 현재 미국 연방도로관리청에서 일단위로 진척도를 확인할 만큼 중요한 기술로 분류되며, 기술사용을 널리 확장시키기 위해 기술 개발, 교육 등과 같은 많은 투자가 이루어지고 있다. 2004년 에 Minnesota에서 시험도로(MnRoad)에 시행한 것을 시작으로
2015 년 현재까지 약 140개 현장에서 사용되어 왔고, Minnesota, Texas, California, Pennsylvania주에서 대부분 시행되고 있다.
인디애나주는 2009년 Trans Tec, FHWA, INDOT 공동으로 IC 롤러를 이용하여 약 2마일 정도의 아스팔트 도로에 시험시공을 했다. 이후 인디애나주에서는 시행자 책임의 시공품질관리 공사에 한하여, 노상층이나 아스팔트층 시공 시 IC 롤러를 선택적으로 사용할 수 있도록 하고 있다(Lee, 2015).
IC 롤러는 실시간으로 지반의 다짐을 제어하는 기술로 데이터의 연속적 수집이 가능하다. 또한, 다짐공사에서 다짐공정과 품질관리 를 분리하여 진행하던 공정을 다짐 진행과 동시에 다짐에 따른 품질관리를 연속적으로 수행할 수 있는 다짐방법이다. IC 롤러는 GPS, 가속도계, 온도센서, 모니터장치가 탑재되어 있고 모바일과 웹에 연동되어 있어 작업자와 현장관리자가 포장 다짐을 하면서 실시간으로 포장상태의 모니터링이 가능한 것이 가장 큰 장점이다.
이러한 모니터링을 통해 구간별 롤러 통과 횟수, 포장 온도, 다짐강 도와 같은 정보를 알 수 있기 때문에 균등한 포장 품질과 최적의 포장상태로의 다짐 시공이 가능하다. 특히 야간작업 시 모니터를
Fig. 2. Overview of the IC Rollers Uses
통해 실시간 다짐 범위와 상태를 운전자가 확인 가능하기 때문에 기존의 다짐장비에 비해 향상된 다짐 품질을 보장받을 수 있다.
또한, 현장 품질시험에 있어 인원 및 장비의 과다 소요를 방지 할 수 있고 공사 중 실시간 품질관리가 가능하여 부등침하 발생구간 에 대한 즉각 적인 대처가 가능하다.
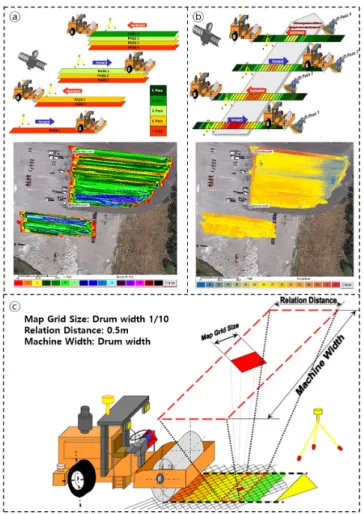
Fig. 2는 다짐공사에서 IC 롤러의 활용 개요이다. GPS에서의 위치정보, 가속도계에서의 지반 품질정보를 수신 받아 다짐관리 프로그램에 색상별 단계화하고, 작업관리자와 운전자는 이를 모니 터링 함으로서 롤러의 체계적인 작업 계획을 수립할 수 있다. Fig.
2의 ⓐ는 위치정보를 색상별 단계화한 것으로 전체 지반의 다짐강 도 확인 후 추가 다짐 구역 및 다짐 횟수를 산정하여 운전자에게 제공한다. ⓑ는 품질정보를 색상별 단계화한 것으로 지반의 다짐 강도를 나타낸다. 비다짐 구간 또는 과다짐 구간에 대하여 분석할 수 있으며, 이를 정량화 하여 기록한다. ⓒ의 경우 다짐관리 프로그램 에 필요한 롤러의 규격을 정의한다. 해외 중장비 회사인 AMMANN 은 Map Grid Size를 드럼 폭의 1/10, Relation Distance를 0.5m, Machine (Route Line) Width 를 드럼 폭에 맞춰 사용한다(FHWA Report, 2011).
2.2 Compaction Meter Value
CMV 는 Eq. (1)과 같으며 진동롤러에 가해지는 진동과 진동으로 인한 반발력의 관계를 이용하여 지반의 강도를 측정하는 방법이다.
∙
(1)
여기서, C = 상수(지반과 관련 있는 상수로 300으로 주로 사용됨;
Mooney and Adam, 2007);
= 첫 번째 조화성분의 가속도 크기; 그리고
= 기본주파수 성분의 가속도 크기.
즉, CMV는 지반의 강도를 도출하는 방법으로서 응력의 변화량 과 지반의 침하량에 의해 결정 되며, 응력의 변화량은 가속도계에서 측정되는 수직가속도에 비례하기 때문에 롤러에 가속도계를 장착 하여 각 진동원에 의한 가속도를 측정하고, FFT하여 CMV 값을 도출함으로서 지반의 다짐강도를 간접적으로 측정한다(Radowski, 2008).
진동롤러의 진동주기에 따른 힘과 지반반력은 지반의 강성에 따라 다양한 형태로 나타나며, 여기서 얻어진 진동 가속도 값에 대해 FFT를 적용하여 주파수 파워스펙트럼(진폭)을 이용한 CMV 를 도출한다.
FFT 는 프랑스의 수학자 푸리에(J.B.A. Fourier)가 발견한 FT (Fourier Transform)의 변형 이론으로, 어떠한 신호 파형이라도 그 파형에 반복이 있으면 여러 가지 주파수의 삼각함수(sin파,
cos 파)로 분해할 수 있다는 이론이다. 이 이론의 발견으로 소리나 진동 등의 시간 신호를 주파수 성분별로 분해할 수 있게 되어 이를 응용한 기계, 전자분야의 많은 발전을 이루게 되었다. FT 자체만으로는 계산량이 많아 주파수를 성분별로 분해하는데 시간 이 많이 걸리기 때문에 현재에는 빠른 속도로 주파수 성분 분해가 가능한 FFT 알고리즘을 사용하는 것이 일반적이다.
2.3 Compaction Meter Value의 적용 기준
Table 1 은 지오다이내믹 사에서 사용하는 다양한 지반에 대한 CMV의 판단 범위를 나타낸다. 즉, 측정된 CMV의 값과 비교하여 지반의 상태를 유추할 수 있으며, 지반의 다짐강도를 판단하는 척도로 사용된다.
일반적으로 다짐공사의 경우 실내시험을 통한 지반의 토질 분석 을 실시하고 그에 따른 최대 지지력계수 기준치를 산정한다. 또한, 현장 품질시험을 실시하여 측정된 지지력계수가 기준치 이상을 만족하는지 파악함으로써 다짐공정을 마무리한다. CMV를 활용한 다짐공사의 경우는 CMV와 지지력계수의 상관관계가 매우 밀접하 기 때문에 현장시험을 통해 얻어진 지지력계수 대신 CMV 값을 이용하여 흙의 다짐정도를 판단할 수 있다.
3. 지능형 다짐 시스템 개발
시스템 하드웨어 개발에는 GPS와 가속도계가 핵심 모듈로 장착 되며, 두 모듈에서 수신되는 데이터를 서버에 수신하기 위한 무선 네트워크 환경을 구축한다. 수신된 두 종류의 데이터는 Time log 형식으로 매치되어 Web-GIS 기반 토공관제프로그램에서 모니터 링이 가능하다. 본 연구에서 개발한 연속다짐관리 시스템은 Web 기반 관제 형식이기 때문에 인터넷이 가능한 어느 곳이든 사용 가능하며, 이는 공용성 측면에서 높이 평가할 수 있다. 작업관리자의 사무실, 모바일 및 작업자의 작업환경에서 별도의 시스템 추가 구축 없이도 모니터링이 가능하다. 본 시스템을 활용하면 기존에 개발된 시스템들의 구축 소요비용 감소 및 편의성을 증대시킬 수 있다. 또한, Google Map을 기반하기 때문에 최신 지도 정보를 갖고 있으며, DB 내 저장된 정보를 날짜 및 시간 별로 확인할 수 있다.
Table 1. Criteria for Compaction Meter Value
Soil Type Compaction Meter Value
Rock fill 60 ~ 100
Gravel 30 ~ 80
Sand 20 ~ 50
Clay and Silt 5 ~ 30
3.1 시스템 하드웨어 개발
고정밀 DGPS 안테나 1개와 연동된 GPS 컨트롤러로부터 정밀 한 위치 데이터를 전송받아 NMEA에서 정의한 NMEA-0183 표준을 UTC (Coordinated Universal Time: 협정세계시) 시간 별로 Web-GIS 기반 토공 관제프로그램에 DB화한다. 여기서, NMEA 0183 표준에서 제시하는 여러 데이터 규격 중 GGA 포맷을 이용하여 위도, 경도 및 UTC 시간 정보를 추출할 수 있으며, 이를 DB화 하고 GIS 맵 상에 표현한다.
또한, 롤러 드럼의 회전축에 가속도계를 부착하고 가속도 데이터 를 0.01초마다 전송받아 FFT 분석을 실시한다. 측정된 결과의 1 초 간격 내에서 기본 주파수 성분의 가속도크기와 첫 번째 조화성 분의 가속도 크기를 나누어 UTC 시간에 따른 CMV 정보를 DB화 한다. 시스템 하드웨어 전체 구성 및 환경은 Fig. 3과 같다.
3.2 시스템 소프트웨어 개발
GPS 위치정보를 이용하여 각 장비의 시간 로그 정보를 분석할 수 있는 Web-GIS 기반 토공관제프로그램은 Google Map 및 JAVA Script API 기술을 활용하여 어느 위치에서나 웹 서버의 GIS 응용 프로그램 서버에 엑세스하여 관리할 수 있는 Web-GIS
기술로 만들어졌다(Lee et al., 2018).
본 연구에서는 GPS 위치정보의 이용뿐만 아니라 가속도계로부 터 취득되는 가속도정보의 이용을 고려하였다. Fig. 4는 본 시스템 의 알고리즘 설계도이며 롤러의 이동경로를 판단하기 위하여 시간 에 따른 위치정보를 취득하고 가속도계로부터 얻어지는 데이터 분석을 통해 두 데이터의 타임매치를 실시한다. CMV의 기준척도 로 100 이상의 데이터는 분석 결과에서 제외하였으며, 100 이내의 결과는 등급별 색상을 입혀 표현하였다.
Fig. 4 의 데이터 분석에 있어 시간, 위도, 경도에 따른 위치정보를 metric system으로 환산하기 위하여 World Geodetic System인 WGS84 좌표계를 Korea Central Belt 2010 coordinate system으 로 변환하였으며, DB 내 coordinate값의 Map grid size, Relation distance 및 Machine width를 산출하여 실제 롤러의 규격과 같게 시스템에 적용하였다.
설계된 알고리즘을 통하여 Web-GIS 기반 토공관제프로그램에 IC Control 기능을 추가 개발하였다. 개발환경은 GPS 컨트롤러와 데이터 로거를 무선 라우터에 연동하여 Web-GIS 기반 토공관제프 로그램 서버와 실시간 연계하고 장비의 위치정보 및 품질정보 관련 데이터를 송수신하도록 하였다. 여기서 위치정보의 UI는 IC Control이고 품질정보의 UI는 CMV라 표현하였으며, 저장된 정보 는 프로젝트 단위별, 날짜별로 확인이 가능하다.
최초로 사용자는 프로젝트를 등록하고 관련 정보(프로젝트 명칭, 주소, 작업관리자, 운전기사, 현장사진 등)를 등록한다. 다음으로 해당 프로젝트 내에 Geo-Fence기능을 사용하여 맵에 직접 폴리라
Fig. 3. Entire Structure and Environment of the System Hardware Fig. 4. Design of the System Algorithm
인을 그려서 폴리곤 형태의 영역정보를 입력한다. 시스템에 기본적 으로 프로젝트 구역, 롤러 경로 등이 인식자로 설정되어 있으며, 사용자가 추가 하여 맵에 정보화 할 수 있다. 또한, 프로젝트에 활용되는 롤러의 제원을 등록할 수 있으며, 사전에 다른 프로젝트에 활용되었던 롤러의 위치정보와 품질정보도 DB에 저장되어 있어 불러올 수 있다.
위치정보는 총 12개의 색상으로 표현되며 동일 지반에 대한 롤러의 다짐 횟수 및 프로젝트 전 범위에서의 이동경로를 파악할 수 있다. 그리고 품질정보는 총 5개의 색상으로 표현되며 롤러가 프로젝트 전 범위에서 다짐을 완료하면 사용자는 표현된 색상정보 를 통하여 다짐정보를 확인할 수 있으며 다짐정보를 통해 롤러의 이동횟수, 중첩횟수, 이동경로, 지반품질 상태 등을 체크할 수 있다.
시스템 소프트웨어 실행 화면은 Fig. 5와 같다.
4. 현장 적용 테스트
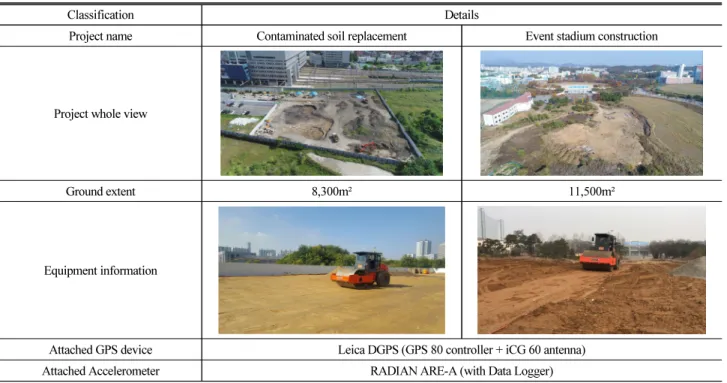
Table 2 와 같이 테스트는 총 두 곳의 현장에서 실시되었다.
오염토 치환공사 현장과 행사장 조성공사 현장 모두 동일한 롤러로 테스트를 진행하였으며, 투입된 롤러에는 지능형 다짐 시스템이 구축되어있다. 지능형 다짐 시스템의 핵심 모듈에는 Leica DGPS 와 RADIAN 가속도계가 있으며, 그 외 전력공급 모듈, 베이스스테 이션, 데이터 로거가 있다.
전체적인 시스템 동작진행은 먼저 현장 다짐강도 시험을 대신하 여 CMV를 적용하기 위한 타당성 검증 테스트가 이루어 졌으며, CMV 와 GPS로 측정된 위치정보와 품질정보를 Web-GIS 기반 토공관제프로그램에 표시하고 분석하였다.
4.1 타당성 검증 테스트
본 타당성 검증 테스트에 사용된 평판재하시험의 적용 방법은 아래와 같다.
① 시험지반을 수평하게 고른 후 재하판 및 측정 장치 설치
② 0.35kg/cm
2의 하중을 가해 재하판을 지면에 안정시키고 게이지를 ‘0’으로 조정
③ 0.35kg/cm
2씩 하중을 가하여 각각의 하중과 침하량 기록
④ 침하량이 1.5cm에 달하거나 하중강도가 지반의 항복점을 넘을 때 종료
Fig. 5. Screen of the System Software
Table 2. Experimental Environment for Applying the Roller to the Spot
Classification Details
Project name Contaminated soil replacement Event stadium construction
Project whole view
Ground extent 8,300m² 11,500m²
Equipment information
Attached GPS device Leica DGPS (GPS 80 controller + iCG 60 antenna)
Attached Accelerometer RADIAN ARE-A (with Data Logger)
⑤ 0.25cm에서의 하중강도를 구하고 지지력계수(kgf/cm
3) 를 구하여 평판재하시험 판정기준과 비교
평판재하시험의 지지력계수 산정을 위한 판정기준은 Table 3의 한국도로교통공사표준시방서에 의거하였으며, 서로 다른 지반의 성질을 갖는 두 개의 현장에서 실시하였다. 현장의 특정 구간에서 롤러가 1회 다짐 시 3회에 걸쳐 평판재하시험을 실시하였으며, 롤러가 지나간 1초~3초대 구간, 8~10초대 구간, 18~20초대 구간으 로 분류하여 총 24회 실시하였다. 침하량 0.25cm에서 종료하였고
그 수치는 시험 기록일지에 기재하였다.
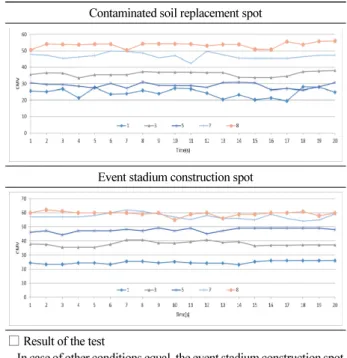
테스트 결과는 Fig. 6의 그래프와 같으며 오염토 치환공사 현장 의 경우 8회 다짐 시 지지력계수가 12 이상임을 확인하였으며, 이는 시멘트 콘크리트 포장의 노체 10이상에 만족한다. 행사장 조성공사 현장의 경우 3회 다짐 시 지지력계수가 15 이상임을 확인할 수 있으며, 이는 비교적 잘 다져진 지반이라 판단할 수 있다.
또한, 두 현장을 비교하면 행사장 조성공사 현장의 테스트 구간이 비교적 잘 다짐되었으며 오염토 치환공사 현장의 경우 5회 다짐 시 측정한 지지력계수보다 3회 다짐 시 측정한 지지력계수가 비교적 높게 나왔기에 테스트 구간 내 모든 지반이 균일하게 다짐되지 않았음을 확인하였다.
이와 비교하기 위하여 CMV 데이터를 분석한 결과는 Fig. 7의 그래프와 같으며, 오염토 치환공사 현장 보다 행사장 조성공사 현장의 CMV가 매우 높게 나왔다. 평판재하시험과 동일하게 CMV 또한 행사장 조성공사 현장에서 더 높게 측정되었으며, 평판재하시 험과 같이 오염토 치환공사 현장의 5회 다짐 시 CMV보다 3회 다짐 시 CMV가 더 높게 나왔음을 확인하였다. 이는 CMV와 지지력계수가 서로 비례하게 증가하고 감소하는 것을 확인할 수 있으며, 두 결과 값의 연관성이 매우 높음을 증명한다.
Table 3. Criteria for Plate Bearing Test (Standard specification of Korea Road Transport Cooperation (KS F 2310))
Division Pavement of cement concrete
Pavement of asphalt concrete
Settlement (cm) 0.125 0.25
Bearing coefficients
Embankment 10 or more 15 or more On ground 15 or more 20 or more
Auxiliary substratum, back
filling
20 or more 30 or more
Contaminated soil replacement spot
Event stadium construction spot
□ Results of the test
- In case of the contaminated replacement spot, the 10 or more of the concrete embankment is good.
- In case of the event stadium construction spot, the 15 or more of the concrete embankment is good.
- In case of the event stadium construction spot, even less rounds of compaction resulted in high compaction strength.
Fig. 6. Change of the Bearing Capacity Coefficients according to the Times of Compaction
Contaminated soil replacement spot
Event stadium construction spot
□ Result of the test
- In case of other conditions equal, the event stadium construction spot showed higher CMV value as in the plate bearing test.
- As was in plate bearing test, 3 rounds of compaction on the contaminated soil replacement spot resulted in higher CMV than 5 rounds of compaction.
- The plate bearing test is highly correlated with CMV.
Fig. 7. Change of CMV according to the Times of Compaction
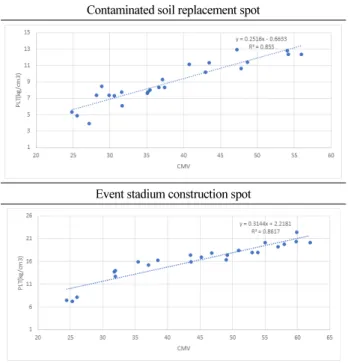
Fig. 8 과 같이 두 개의 현장에 CMV와 지지력계수에 대한 회귀분 석을 실시한 결과, CMV와 지지력계수가 비례하고 통계적으로 조밀한 분포를 나타내고 있어 상관관계가 매우 높음을 확인하였다.
즉, 기존 재래식 방법을 대체할 수 있는 연속 다짐강도 측정 방법인 CMV 의 활용 타당성을 확인하였다.
4.2 다짐정보 시각화
Fig. 9는 개발된 프로그램을 기반 하여 위치정보를 이용한 롤러 의 이동경로를 시각화한 결과이다. 총 12회 다짐 횟수를 Step 별 색상으로 구분하고 1회 다짐한 롤러의 이동구간은 파란색으로 표시되며, 다짐 횟수가 증가함에 따라 빨간색으로 표시된다. 표시된 선의 굵기는 1.8m로 롤러 드럼의 폭과 동일하며 맵 Grid Size는 0.18m, 롤러의 Relation Distance는 0.5m로 설정하였다.
해당 시스템을 활용하여 작업관리자와 운전자는 계획 다짐지반 의 비다짐 구간 및 과다짐 구간을 판단할 수 있으며, 실시간 모니터링 이 가능하기 때문에 즉각적 다짐계획 변경 및 롤러의 작업현황에 대한 파악이 가능하다. 또한, 품질정보 데이터와 비교하여 각각의 현장 특성에 맞게 다짐횟수를 조정할 수 있다.
두 개의 현장 모두 대부분의 지반 다짐작업 횟수가 5회 이내이며 다짐구간 바깥구역은 안쪽구역에 비하여 상대적으로 다짐횟수가 적음을 알 수 있다. 이는 운전자가 모든 구간에 대하여 동일 다짐횟수 를 적용했다고 판단할 수 있는 경험적 오차를 예방할 수 있다.
Fig. 10 은 총 5개의 범위 내 CMV 결과를 Step 별 색상으로 구분한 결과이다. 0~20의 CMV는 파란색으로 표시하였으며,
CMV 가 증가할 때마다 초록색, 갈색 등으로 변하여 마지막 80~100 의 범위는 빨간색으로 표시하였다.
Contaminated soil replacement spot
Event stadium construction spot
Fig. 8. Correlation between CMV and Bearing Coefficients
Contaminated soil replacement spot
Event stadium construction spot
Fig. 9. Results of Visualizing the Position Contaminated soil replacement spot
Event stadium construction spot
Fig. 10. Results of Visualizing the Quality Information