222 한국 CAD/CAM 학회 논문집
제 15권 제 3 호 2010년 6월 pp. 222-233
햅틱 장치의 프로파일 측정 및 감성 평가
전차수*, 추헌성*, 박세형**, 김래현**, 신상균**
Torque Profile Measuring and Sensibility Evaluation of a Haptic Device Cha-Soo Jun*, Heon-Seong Choo*, Sehyung Park**, Laehyun Kim** and SangKyun Shin**
ABSTRACT
Developed in this research is a TP (tangible prototyping) system, which consists of two modules; (1) a virtual reality model to evaluate the functions and appearance of the product, and (2) a haptic device to emulate tactile and kinesthetic properties of mechanical dial knobs. As an example, a washing machine is modeled using a commercial CAD system and transformed in VRML and X3D formats.
Some dynamic behaviors and kinematic characteristics are programmed using X3D script and Java. Var- ious haptic behaviors of the dial are generated by modulating torque profile according to the rotation angle. A torque profile measuring system is developed to evaluate the behaviors of the haptic dial phys- ically. Haptic sensibility evaluations are accomplished using the TP by semantic differential method.
Key words : tangible prototyping, virtual reality, haptic dial, sensibility evaluation, torque profile measuring
1. 서 론
제품의 고급화에 대한 요구가 커짐에 따라 제품이 주는 시각 및 청각적 느낌뿐 아니라 촉감도 감성의 중 요한 일부로 인식되고 있다. 또한 사용자가 제품을 먼 저 접하는 부분은 제품의 외형적인 형상과 조작 감으 로써 핸드폰의 클릭 또는 슬라이드 부를 밀어보거나, 세탁기의 다이얼을 돌려보면 세련되거나 우아한 느낌 이 드는데 이러한 감성은 감성 품질에 큰 영향을 미치 게 됨으로써 이를 고려한 PUI(physical user interface) 에 대한 연구가 필요하게 되었다. PUI는 물리적인 UI 로서 제품 사용에 있어서 버튼이나 다이얼, 레버 같이 인간이 도구나 장비와 상호 작용 하는 것을 도와주는 일련의 물리적 매개체이다. 좋은 PUI는 단순히 ‘예쁘 다’는 차원을 넘어 사용자가 좀더 편하고 정확하게 제 품을 사용할 수 있게 하는 ‘직관적 설명서’ 역할을 한 다. 또한 IT기기의 다양한 기능과 대용량의 정보를 효 율적으로 처리하기 위해서 새로운 물리적 사용자 인
터페이스가 요구하고 있다. 하나의 예로 많은 수의 버 튼을 대신하는 새로운 물리적인 사용자 인터페이스 중 하나가 다이얼 휠이다. 다이얼 휠은 Fig. 1과 같이 자동차 기기, 핸드 헬드 기기, 가전용 기기 등 많은 곳에서 쓰이고 있으며, 또한 다이얼의 작동감에 대한 느낌도 사용성에 따라서 달라진다.
자동차 기기 중 BMW사는 5 series 이상의 모델부 터 iDrive라는 햅틱 회전 조절기(haptic knob)를 설치 하여 사용자가 에어컨, 오디오, 창문 등 자동차 내에 조절을 필요로 하는 대부분의 조작장치를 조그만 다 이얼 하나만 조작함으로써 모두 해결할 수 있게 하는 장치인데, 조작 대상이 바뀔 때나 동작 레벨이 바뀔 때 등 촉각적인 피드백을 통하여 어느 단계에 있는지 를 직관적으로 알 수 있는 인터페이스이다[1]. 또한
*경상대학교
**한국과학기술연구원 -논문투고일: 2009. 03. 05 -논문수정일: 2009. 12. 30 -심사완료일: 2010. 03. 04
Fig. 1. Dial wheel 응용분야.
Immersion사에서는자동차분야외에도정보가전, 의
용공학, 산업전자등의분야에서사용가능한다양한 햅틱디바이스를연구-개발하고있는중이다[2,3]. 이러 한점을바탕으로제품개발기간을단축하고감성품 질을향상시키기위해서는제품을기획-설계하는과 정에서 PUI에대한감성품질을미리평가하고그결 과를설계에반영할수있는체계가필요하다.
촉각에대한평가는 Weber가사람의촉각의민감도
(human tactile sensitivity)에관한연구를시작한 이 래로지각되는재질과자극의물리적양에관한많은 연구가진행되어왔다[4]. 촉각중운동감에대한유사 한연구는원격조종로봇에대한연구나손으로조종 기를움직일때대한강성이나감쇠에대한연구등에 서찾아볼수있다[5]. 하지만이러한현재의촉각장 치들은단순하게힘의강양변화의자극을가하는수 준에머물고있는형편으로, 사용자에게보다사실적
인촉각을전달하기위해서는사람이촉감을느끼는 메커니즘에관한생리학적, 정신물리학적연구가요
구된다.
본연구에서는가상프로토타이핑시스템을이용 하여촉각에대한감성을객관화/정량화하기위해감 성평가를실시하였으며, 감성평가분석시많이이용 되는의미분별법(SD)을사용하여촉각에대한감성 어휘들을추출하였다. 또한이를실물다이얼의설계 에반영할수있도록만든토크프로파일장치를소개 한다.
2. Haptic device를 이용한 실감형 프로토타이핑 시스템 구축
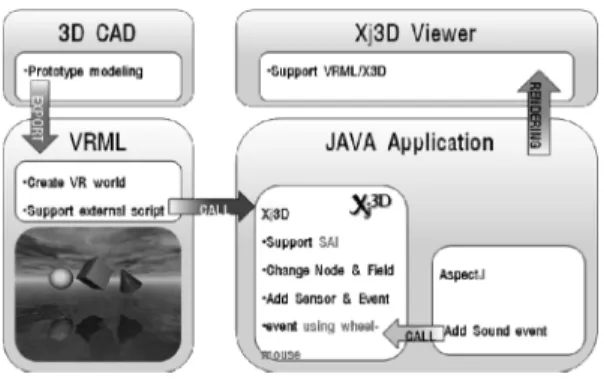
실감형프로토타이핑시스템(Tangible prototyping system)은 VR시스템과 Haptic 장치로구성되어있다.
VR 시스템은 Fig. 3과같은과정으로구성된다. 3D
CAD프로그램에서가상시제품을모델링하고 VRML
코드로변환하여가상환경을 구축한후, JAVA API
에서 SAI(scene access interface)를 이용하여각 객 체의노드와필드에접근하여이벤트를발생시킨다.
SAI를통해 VRML 필드의값을변경하거나필드값
의변화를감지하고읽을수있으며, VRML상의센
서를이용한이벤트전달기능을더할수있다. 뷰어
로는 JAVA API를 지원하는 오픈 소스인 xj3D
viewer를이용하였다[6].
2.1 가상시제품CAD data 변환
먼저 VR시스템을구축하기위해서가상시제품을
CAD 프로그램인 UGNX를 이용하여 제작하였다.
UGNX는 2007년지멘스와 UGS와결합한하자동
차, 항공기, 가전, 기계, 금형, 의료기기등모든제조 산업에서개념적인설계에서부터제품모델링, 분석,
제조에이르기까지전체적인제품개발프로세스를위 한강력한소프트웨어이다. 본연구에서는 VR 모델을
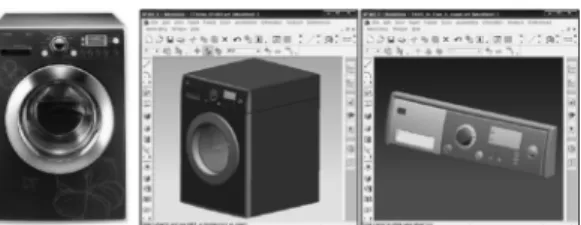
세탁기의형상을정의하고 CAD data를설계하고구
현했다. 시제품인세탁기를실제크기와같은형상을
구현하고자각부품들의치수를정의하고모델링된 세부파트를 Assembly modeling을이용하여 Bottom-
up 방식의조립설계하여세탁기의조립부품들의트
리구조를손쉽게관리할수있게하였다. 이는항공
기엔진과같은수천개의부품으로구성된모델까지 도관리가가능하므로복잡한첨단제품의설계에보 다많은이점을제공하여주며, 또한조립하여설계 완료시각부품들의변형이용이하여설계자의수작
업업무부담을감소시켜준다. Fig. 4는실제세탁기
를대상으로 모델링 한결과이며 세탁기작동부인 패널부분을 상세히설계하고 다른부분은간략화 하였다.
Fig. 2. Research overview.
Fig. 3. VR Modeling process.
한국CAD/CAM학회 논문집 제15권 제 3호 2010년 6월
224 전차수, 추헌성, 박세형, 김래현, 신상균
2.2가상환경모델링
본연구에서는가상시제품을 CAD 데이터에서가
상환경을지원하는 VRML로변환한후, 세탁기모델
의 Background 설정과 navigation 설정, viewpoint
설정, texturing 설정을정의하여 Fig. 5와같이실감 나는 GUI(graphic user interface) 환경을구축하였다.
세탁기 작동패널의 각종이벤트에 대한 모습은
Fig. 6과같다. 버튼들과 LED램프표시, LCD Display
판의변화, 실감음향을실제와같이표준모드, 삶음모
드, 울모드, 이불모드등의각종다이얼의동작에따 라선택하도록이벤트를정의하였다. 또한다이얼노 브를여러가지형상으로바꾸어달도록하여가상공 간에서도실제제품과같은형상의다이얼로교체가 능하도록구현하였다.
2.3 Haptic다이얼통합
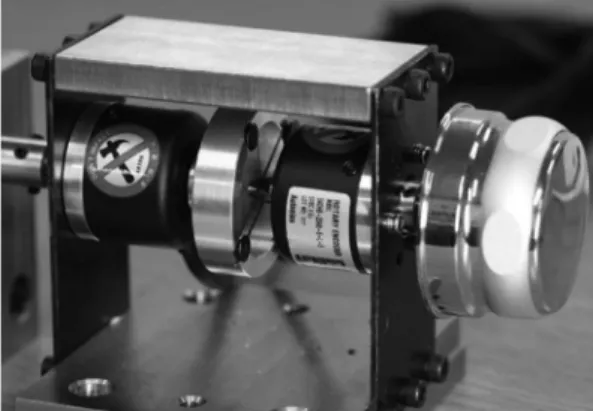
Fig. 7은햅틱하드웨어장치전체모습으로 motor
shaft로구성된물리적인다이얼과 Visual Server를연 계하는 Haptic Server로구성되어있다. Haptic Server
는리눅스를기반으로 motor를제어하고통신모듈
을 통하여 Visual Server와 실시간 이벤트를 주고
받는다.
Fig. 4. Washing machine modeling with UGNX.
Fig. 5. Washing machine of virtual reality.
Fig. 6. Operation modeling for a washing machine.
Fig. 7. Hardware Components for a haptic dial.
Fig. 8. A dialog box for the haptic dial control.
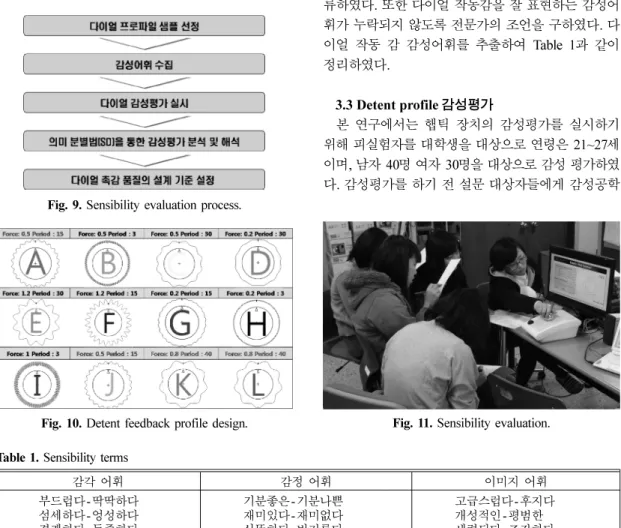
Fig. 9. Sensibility evaluation process.
Fig. 10. Detent feedback profile design.
Table 1. Sensibility terms
감각 어휘 감정 어휘 이미지 어휘
부드럽다-딱딱하다 섬세하다-엉성하다 경쾌하다-둔중하다 팽팽하다-느슨하다 세다-약하다
기분좋은-기분나쁜 재미있다-재미없다 산뜻하다-번거롭다 믿음직스러운-불안한 편하다-불편하다
고급스럽다-후지다 개성적인-평범한 세련되다-조잡하다 중후하다-경박하다 화려하다-소박하다 Fig. 11. Sensibility evaluation.
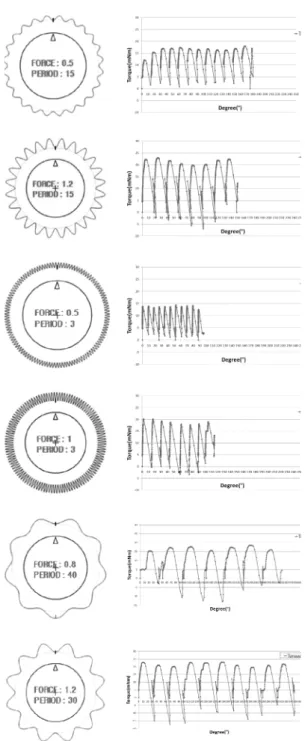
햅틱 다이얼은 미리 디자인 된 feedback profile을 선택하거나 detent의 force나 period 값을 조정하여 다 이얼을 제어한다. 또한 VR모델에 Rotary haptic 기구 를 연계시켜 다이얼의 작동감각을 사용자가 사실적으 로 느낄 수 있도록 하였다(Fig. 8).
3. 햅틱 다이얼의 감성평가 기법 개발
감성 공학이란, 인간이 가지고 있는 마음을 이미지 나 감정을 구체적인 제품 설계로 실현해 내는 공학적 인 접근 방법이다. 본 연구에서는 다이얼을 사용하는 사용자가 어떠한 감성을 느끼는지 알고자 한다. 하지 만 그 다이얼을 사용하는 사용자의 감성을 직접 측정 하는 것이 어렵다. 이를 위해 촉각 품질의 설계 기준 을 설정하기 위해 Fig. 9와 같이 총 5가지 프로세스를 제시하였다.
3.1 다이얼 프로파일 샘플 선정
먼저 다이얼 프로파일 샘플을 선정하기 위해 실물 다이얼과 비슷한 햅틱다이얼 프로파일 12가지의 type 으로 각각 힘(force)와 간격(Period)를 조절하여 Fig.
10과 같이 구성하였다.
3.2 감성 형용사 추출
다이얼을 사용하는 사용자에 대해서 어떠한 감성을 느끼는지 그 감성을 직접 측정하는 것은 어렵다. 따라 서 감성표현에 가장 가까운 어휘를 찾아내고 감성을 구체적인 디자인 요소로 번역하는 시스템을 구축하기 위해서는 먼저 감성을 표현하는 용어를 수집하는 것 이 중요하다. 다이얼에 대한 감성 어휘 수집 방법은 다이얼, 로터리 스위치, 마우스 휠 등에서 표현되는 다 양한 어휘들 중 빈도수가 가장 많은 어휘를 추출하여 다시 추출된 어휘를 감각어휘/감정어휘/이미지로 분 류하였다. 또한 다이얼 작동감을 잘 표현하는 감성어 휘가 누락되지 않도록 전문가의 조언을 구하였다. 다 이얼 작동 감 감성어휘를 추출하여 Table 1과 같이 정리하였다.
3.3 Detent profile 감성평가
본 연구에서는 햅틱 장치의 감성평가를 실시하기 위해 피실험자를 대학생을 대상으로 연령은 21~27세 이며, 남자 40명 여자 30명을 대상으로 감성 평가하였 다. 감성평가를 하기 전 설문 대상자들에게 감성공학
한국CAD/CAM학회논문집 제15권제3호 2010년 6월
226 전차수, 추헌성, 박세형, 김래현, 신상균
에대한설명과함께여러가지표본다이얼을작동하 게함으로써다이얼의다양한감각을미리익히게하 였다(Fig. 11).
감성평가지는추출된 15개의감성어휘를이용하 여 7단계리커트척도를이용하였다. 다음 Table 2는 감성평가지이다. 한가지 type당 15개의감성평가를 하였으며총한사람당 12개의감성평가지에평가 하였다.
3.4 햅틱장치의감성평가결과
본연구에서감성평가된자료를분석할필요가있 다. 평가된자료에는어휘들간에복잡한상관관계가 있다. 이러한문제점들을해결하기위해서는감성어
휘들중에서독립적이고중요한요인들을추출할필 요가있다. 추출된몇개의요인들을근거로감성어휘 들간의상관관계를좀더간단하고명확하게볼수있 게된다. 이러한분석을요인분석(factor analysis)이 라한다.
요인분석을하기위한방법은 4단계로나눌수있 다. 1단계는주성분분석이다. 설문조사결과로얻은 자료들은감성어휘들이너무많고, 서로복잡한상관 관계가있기때문에다차원적인변수들을축소, 요약 하여차원을단순화한다. 2단계는어떤감성어휘가어 떤 요인과의 상관관계가 높은지 명확히 하기 위해
Varimax방법을사용한다. 3단계는회전요인부하행
렬의원소중절대치가 0.55(30%) 이상인것을선택
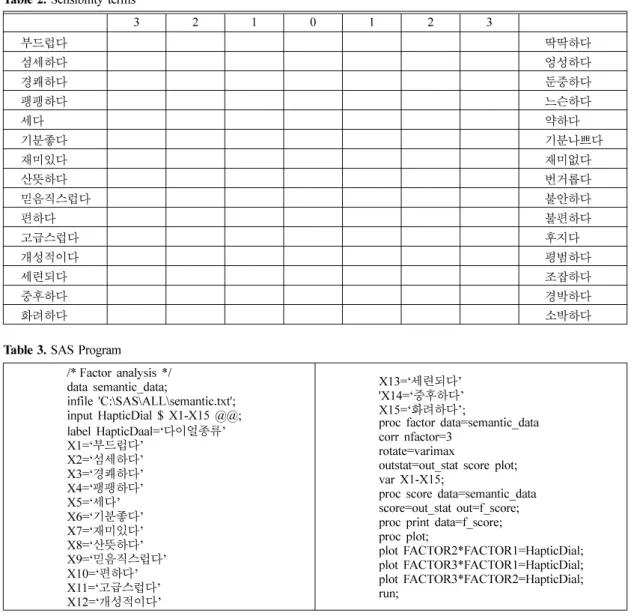
Table 2. Sensibility terms
3 2 1 0 1 2 3
부드럽다 딱딱하다
섬세하다 엉성하다
경쾌하다 둔중하다
팽팽하다 느슨하다
세다 약하다
기분좋다 기분나쁘다
재미있다 재미없다
산뜻하다 번거롭다
믿음직스럽다 불안하다
편하다 불편하다
고급스럽다 후지다
개성적이다 평범하다
세련되다 조잡하다
중후하다 경박하다
화려하다 소박하다
Table 3. SAS Program
/* Factor analysis */
data semantic_data;
infile 'C:\SAS\ALL\semantic.txt';
input HapticDial $ X1-X15 @@;
label HapticDaal=‘다이얼종류’ X1=‘부드럽다’
X2=‘섬세하다’ X3=‘경쾌하다’ X4=‘팽팽하다’ X5=‘세다’ X6=‘기분좋다’ X7=‘재미있다’ X8=‘산뜻하다’ X9=‘믿음직스럽다’ X10=‘편하다’ X11=‘고급스럽다’ X12=‘개성적이다’
X13=‘세련되다’ 'X14=‘중후하다’ X15=‘화려하다’;
proc factor data=semantic_data corr nfactor=3
rotate=varimax
outstat=out_stat score plot;
var X1-X15;
proc score data=semantic_data score=out_stat out=f_score;
proc print data=f_score;
proc plot;
plot FACTOR2*FACTOR1=HapticDial;
plot FACTOR3*FACTOR1=HapticDial;
plot FACTOR3*FACTOR2=HapticDial;
run;
하여각요인과관계가가장큰것을주요요인으로선 택한다. 4단계는조사된각제품별, 평가원별요인 득점분석을통화여도표화(감성지도) 한다[8,9].
Table 3은 SAS통계프로그램을이용하여감성평가
자료로부터읽어들여감성어휘 15개를변수로정의 하고, 주요요인을 Output 변수로선언하여두 Output
을 2차원축에배치시켜감성지도를출력하는코드 이다.
3.5 Detent profile 감성평가
감성평가를하기전햅틱다이얼의파라미터를변 경시켜 12개의 Type으로각 Test마다힘의강도와간
격을조절하여다이얼작동감이다르게 Fig. 19와같
이구성하였다. Test-A와 Test-J는동일한 profile으로 감성평가를하는대상자들의일관성을평가하고, Test- K와 Test-L은 같은 profile에 Tangible prototyping
system의유무로감성평가를실시하였다.
요인분석을실시하여감성어휘들간의상관관계를 찾고 3개의집단으로나누었으며그집단을대표할
수있는독립적이고대표적인언어를추출해내었다.
요인분석결과 Table 2의 중앙의 15행x3열은요인
부하행렬을가리키며각축에절대값이가장큰값이 주용인으로써, 정(−)일때는척도의오른쪽어휘를, 부
(+)일때는왼쪽어휘를기입한다. 제1 요인으로 ‘세련 된’, 제2요인으로 ‘팽팽한’, 제 3요인으로 ‘경쾌한’을 주요인으로분석하였다.
요인분석에대한결과값으로감성지도(Sensibility
map)를만들수있다. 3차원중 1축은제1요인, 2축
은제2요인, 3축은제 3요인이며, 3차원으로분석하기 어려운점때문에감성지도결과를각 2축씩이용하 여 2차원평면에나타내었다. 첫번째햅틱다이얼의
12개타입중 Fig. 12는 Test-A와 Test-J의비교를나 타낸다. Test-A와 Test-J는동일한프로파일로감성평 가대상자들의일관성을평가한결과비교적일관성 있음을보였다.
Table 4. Sensibility terms
사용한 15개 형용사의 쌍 1 2 3 제1요인 제2요인 제3요인
1 부드럽다 - 딱딱하다 0.1782 −0.8268 0.2102 딱딱하다
2 섬세하다 - 엉성하다 0.2974 0.2956 0.5600 섬세하다
3 경쾌하다 - 둔중하다 −0.0264 −0.0590 0.8279 경쾌하다
4 팽팽하다 - 느슨하다 0.1048 0.9153 0.1218 팽팽하다
5 세다 - 약하다 0.0998 0.9120 0.0744 세다
6 기분 좋다 - 기분 나쁘다 0.5101 −0.0897 0.6511 기분좋다
7 재미있다 - 재미없다 0.4050 0.1496 0.6831 재미있다
8 산뜻하다 - 번거롭다 0.5219 −0.1465 0.5722 산뜻하다
9 믿음직스럽다 - 불안하다 0.5606 0.5436 0.1997 믿음직스럽다 10 편하다 불편하다 0.6703 −0.1737 0.2929 편하다 11 고급스럽다 - 후지다 0.7530 0.0198 0.3436 고급스럽다 12 개성적이다 - 평범하다 0.4995 0.2639 0.3040 개성적이다 13 세련되다 - 조잡하다 0.7862 −0.0695 0.2496 세련되다 14 중후하다 - 경박하다 0.7753 0.2039 −0.1125 중후하다 15 화려하다 - 소박하다 0.5270 0.2727 0.3359 화려하다
Fig. 12. Sensibility maps for Test-A & Test-J.
Fig. 13. Sensibility maps for Test-K & Test-L.
한국CAD/CAM학회 논문집 제15권 제 3호 2010년 6월
228 전차수, 추헌성, 박세형, 김래현, 신상균
Fig. 13은 Test-K과 Test-L을 비교를 나타낸다.
Test-K와 Test-L은 동일한 프로파일에 Tangible prototyping system의유무에따라평가하였다. 그결
과 Tangible prototype을 이용한 경우가 ‘팽팽함’은 비슷하지만제2, 3요인인 ‘경쾌함’과 ‘세련됨’이더욱 큰 값으로 평가되어 감정이나 이미지 어휘에는
Tangible prototype system을이용하는것이감성평가 에유용하다는것으로평가되었다.
다이얼작동감평가에대한최종결과값인감성지 도는 Fig. 14와같다.
다음 Fig. 15는각프로파일형상으로요약하여감
성지도로나타낸것이다. 분석결과힘(Force)이같은
경우간격(Period)가커짐에따라더세련됨을알수
있고힘이매우크거나작을경우에도조잡하거나둔
중함을 느끼는것으로 나왔다. 특히힘이 0.5, 간격
30일때가장세련되고경쾌한느낌을주었다.
다음아래 Table 5는감성어휘와설계재원간의편
상관계수를 보여준다. Torque 프로파일인 Force와
period의변수의변화에따른감성어휘의관계를볼
수있는데, Force의강도에따라영향을많이받는감
성어휘는부드럽다-딱딱하다(−0.762), 팽팽하다-느
슨하다(0.715).
세다-약하다(0.665), 믿음직스럽다-불안하다(0.40583)
으로결과를낼수있었고, Period의변화에따라영
향을많이받는감성어휘는부드럽다-딱딱하다(0.307),
중후하다-경박하다(0.275), 섬세하다-엉성하다(−0.238),
팽팽하다-느슨하다(0.222)’으로결과를얻어거의영
Fig. 14. Sensibility maps.
Fig. 15. Sensibility maps.
Table 5. Partial correlation
사용한 15개 형용사의 쌍 형상요소 Force Period 1 부드럽다 – 딱딱하다 −0.76259 0.30777 2 섬세하다 - 엉성하다 0.14087 −0.23889 3 경쾌하다 - 둔중하다 −0.07246 −0.12017 4 팽팽하다 - 느슨하다 0.71570 −0.22235 5 세다 - 약하다 0.66534 −0.15617 6 기분좋다 - 기분나쁘다 −0.12739 0.01727 7 재미있다 - 재미없다 0.05448 −0.14593 8 산뜻하다 - 번거롭다 −0.18666 0.01799 9 믿음직스럽다 - 불안하다 0.40593 0.06812 10 편하다 불편하다 −0.17462 0.19549 11 고급스럽다 - 후지다 −0.03851 0.14893 12 개성적이다 - 평범하다 0.14013 −0.15299 13 세련되다 - 조잡하다 −0.10101 0.09088 14 중후하다 - 경박하다 0.15553 0.27555 15 화려하다 - 소박하다 0.18889 −0.08130
향이없는것으로평가할수가있었다.
4. 햅틱 다이얼 프로파일 측정기 개발 Tangible prototyping system을기반으로햅틱다이 얼의프로파일을결정한후최종적으로실물다이얼의 설계-제작에필요하다. 본연구에서는햅틱다이얼로 부터실물다이얼프로파일의촉감을일치시키기위
해 torque profile을측정할수있는장치를 개발하
였다. 토크프로파일측정기의 개념적인설계안은
Fig. 16과같다.
토크를측정에서여러가지토크측정방법중종 래의스트레인게이지를이용한토크측정장치를사 용하여그크기가미약한미소토크를측정하게되면 토션바의비틀림변위를발생시키지못하기 때문에 토크크기가 미약한미소토크를측정하는데 한계가 있고, 토션바의길이를소형화할수없기때문에어 려운문제점이있다. 이를해결하기위해엔코더를이 용한토크측정기를개발하였다[11,12].
작동원리는구성요소중두개의축에평행한강 성핀과그사이에끼어있는쐐기막대로연결되어 있고, 두개의축에토크가걸리면이에따라쐐기막
대가강성핀을벌리고각변위가발생되며, 각변위는
각축에연결된엔코더값의차이를측정한다. 쐐기
막대의특징은다음과같다.
① 쐐기막대의끝부분의단면형상에따라각변 위와 torque와의 profile 형태를조정할수있다.
② 쐐기막대의삽입 깊이를 조정하고 이를통해
torque를두면각변위에따른토크프로파일의
크기를바꿀수있다.
③ 토크가측정가능한범위를벗어나면쐐기막대 는평행핀사이에서한바퀴넘어 돌게되어
그범위이상의 torque가걸리지 않고, 이때도
강성핀이망가지지않는다.
④ 각변위의크기에따라강성핀의벌어짐이커져 토크가증가한다.
엔코더는샤프트의회전량만큼펄스를발생하는 장치이며, 엔코더의펄스값은시그널프로세싱유닛
(signal processing unit)에의해아날로그신호에서디 지털신호로변환하여출력시스템에전달한다. 측정 한값은캘리브레인션(calibration)에토크값을 계산 할수있다.
UGNX를이용하여 Fig. 17과같이 설계하여 Fig.
18과같이제작하였다. 제작시고려해야할사항은 두축의회전중심을일치시키는게중요하다.
개발된측정기는하우징사이의두축에두개의
Encoder를설치하여다이얼의회전에 따른두 축의
각변위를측정하여 0.1 Nm이하의미소토크를측정
하며, 구조가간단하여측정장치의소형화가가능하 고측정다이얼에따라측정범위를손쉽게조정할수 가있다.
Fig. 16. A dialog box for the haptic dial control.
Fig. 17. Torque profile measuring system using UGNX.
Fig. 18.Parallel pin spring type disk for the torque measuring device.
한국CAD/CAM학회논문집 제15권제3호 2010년 6월
230 전차수, 추헌성, 박세형, 김래현, 신상균
엔코더의사양은 1회전당 8192 펄스를출력하고
Sampling frequency는 1~700/sec이다. 토크측정시 노브는세탁기노브를부착하고다이얼또는로터 리스위치를바이스에물려실험을실시한다. 이때 시그널프로세싱유닛에서두 Encoder의펄스를아날 로그신호에서디지털신호로변환한다. 변환된신 호는연결된컴퓨터에전송되어파일을생성하여엑 셀에서지원하는 VBA프로그램을이용하여각위상 차에 대한 Torque profile을 얻을 수있다. VBA프 로그램의모습을 Fig. 20과같고, 각위상차 (펄스)
가주어지면이에해당되는토크를쉽게환산할수 있다.
토크측정시노브는세탁기노브를부착하고다이 얼또는로터리스위치를바이스에물려실험을실시 한다. 이때 Signal processing unit에서두 Encoder의
펄스를아날로그신호에서디지털신호로변환한다.
변환된신호는연결된컴퓨터에전송되어파일을생 성하여엑셀VBA 프로그램을이용하여각위상차에
대한 Torque profile을얻을수있다. 토크측정기의
전체모습은 Fig. 19와같다.
측정한각위상차를이용하여토크를구하기위해 서 calibration이필요하다. calibration이필요한이유 는측정기의기준이되는토크를정의하기위해서이
다. 토크를측정하는방법은 calibration바의일정한길
이에추를매달아작용하는힘과바길이의연산에의 해구할수있다. Table 6은 calibration 과정의결과 값을보여주고있다.
아래실험에서는추를대신하여무게가일정한새 동전을사용하여개수를늘려가면서측정하였다. 100
원짜리새동전한개의무게는약 5.42 g으로축으로
부터 100 mm 떨어진곳에매달았는데동전 하나의
토크는 5.32 mNm가된다. 동전의개수를늘려가면서
두 Encoder의평균각위상차에대해아래그림과같
이테이블과그래프로정리했으며(Fig. 21) 파란색차 트는각토크량에따라평균펄스값이고 각토크 량의평균펄스증가분값이다. 동전 8개부터는토크 측정의한계치를넘기때문에동전 7개까지평균펄 스를구하였으며각위상차(펄스)가주어지면이에해
당되는토크를쉽게환산할수있다.
햅틱다이얼의프로파일을생성하기위해다양한 실물다이얼을수집하였다. Fig. 22는실제마우스,
Fig. 19. Torque measuring system.
Fig. 20. VBA program.
Table 5. Calibration
Calibration
동전(개) 무게(g) Torque
(mNm) Avg.pulses Pulse increments
1 5.42 5.32 8 -
2 10.84 10.63 58 50
3 16.26 15,95 120 62
4 21.68 21,26 187 67
5 27.1 26.58 268 81
6 32.52 31.89 370 102
7 37.94 37.21 478 108
8 43.36 42.52 X X
9 48.78 47.84 X X
Fig. 21. Calibration graph.
세탁기, 로터리스위치를분해한내부구조를보여준
다. Detent 역할을하는부분은마우스의내벽의톱
니, 세탁기는돌출형의톱니가 spring에의해발생하
며, 로터리스위치는두판의마찰력에의해 detent를
발생시킨다.
Fig. 23은실물다이얼을측정한결과값이다. 세탁
기다이얼의최고값은 18 mNm이며, 한주기당 30o로
한바퀴돌리는데 12개의간격을가진다. 로터리스 위치는두판이마찰되는부분의면적때문에톱니를
넘어갈때 maximum detent값의분포가넓다.
Fig. 24는햅틱다이얼의 Detent 프로파일을사용자
가감성평가에서사용되었던프로파일을 설정한후 프로파일에 대한최고 토크값(maxiumum torque)과 간격(period)의결과값을얻을수있었다.
다음 Fig. 25는햅틱다이얼모드중조그다이얼,
idrive 음향조절기, detent의크기를그라데이션한다
이얼등햅틱프로파일을설정한후측정한결과값 이다.
Fig. 22. Real dial.
Fig. 23. Torque profiles -1. Fig. 24. Torque profiles -2.