1. 서 론
심해에 매장된 자원을 시추하기 위한 선박의 수요가 증가하면 서 DPS가 적용된 Drill ship, Semi-RIG, FPSO 등 선박 및 해양 플랜트 수주가 증가하고 있다. 이에 따라 DP 제어 알고리즘이 적용된 선박의 위치유지(station keeping) 성능 개선 또는 추력기 Power 절감을 위한 제어 알고리즘에 관한 연구가 많이 진행되고 있다.
DP 제어 알고리즘은 원하는 위치 및 선수각(heading angle) 을 유지시키기 위하여 Surge, Sway, Yaw 3자유도 수평면 상에 서 제어를 수행한다. DP 제어 알고리즘이 적용된 제어 대상은
환경외란이 작용하는 조건에서 오랜 시간 작업을 수행해야하므 로 다양한 환경외란 조건에서 작업이 가능한 제어 알고리즘이 필 요하다.
국외연구의 경우, 다양한 환경외란 조건을 고려한 DP 제어 알 고리즘에 관한 연구로는 환경외란이 작용하는 선박의 최적 선수 각 제어를 통해 연료 절감이 가능한 Weather Optimal Positioning Control(WOPC) 알고리즘이 연구된 바 있다 (Fossen
& Strand, 2001). 환경외란에 지속적으로 노출되어 있는 선박의 위치 및 선수각 유지를 위해 계측된 가속도를 피드백 제어에 이 용하는 Acceleration Feedback(AFB) 제어 알고리즘에 대한 연구 (Lindegaard, 2003)와 극심한 환경외란 조건이 선박에 미치는 영향 및 그 조건에서 작업을 수행할 수 있는 개선된 제어 알고리
퍼지게인 스케쥴링 PID 제어이론을 이용한 동적 위치 유지 제어기법에 관한 연구
전마로․ 김희수․ 김재학․ 김수정․ 송순석․ 김상현† 인하대학교 조선해양공학과
A Study on the Dynamic Positioning Control Algorithm Using Fuzzy Gain Scheduling PID Control Theory
Ma-Ro Jeon․Hee-Su Kim․Jae-Hak Kim․Su-Jeong Kim․Soon-Seok Song․Sang-Hyun Kim† INHA University, Dept. of Naval Architecture & Ocean Engineering
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Many studies on dynamic positioning control algorithms using fixed feedback gains have been carried out to improve station keeping performance of dynamically positioned vessels. However, the control algorithms have disadvantages in that it can not cope with changes in environmental disturbances and response characteristics of vessels motion in real time. In this paper, the Fuzzy Gain Scheduling - PID(FGS - PID) control algorithm that can tune PID gains in real time was proposed. The FGS - PID controller that consists of fuzzy system and a PID controller uses weighted values of PID gains from fuzzy system and fixed PID gains from Ziegler - Nichols method to tune final PID gains in real time. Firstly, FGS - PID controller, control allocation algorithm, FPSO and environmental disturbances were modeled using Matlab/Simulink to evaluate station keeping performance of the proposed control algorithm. In addition, simulations that keep positions and a heading angle of vessel with wind, wave, current disturbances were carried out. From simulation results, the FGS - PID controller was confirmed to have better performances of keeping positions and a heading angle and consuming power than those of the PID controller. As a consequence, the proposed FGS - PID controller in this paper was validated to have more effectiveness to keep position and heading angle than that of PID controller.
Keywords :Dynamic Positioning System(DPS, 동적 위치 유지 시스템), Proportional-Integral-Derivative Control(PID 제어), Fuzzy Gain Scheduling PID control(FGS - PID, 퍼지 게인 스케쥴링 PID 제어), Environmental Disturbances(환경 외란), Thrust allocation algorithm(추력 분배 알고리즘)
즘에 대한 연구 (Sørensen, et al., 2002)가 진행된 바 있다. 또 한 다양한 환경외란 조건에 맞게 선박의 제어기를 선택하여 제어 성능을 개선하는 Supervisory – Switching Control(SSC) 알고리 즘에 대한 연구 (Sørensen, et al., 2005; Nguyen, 2006;
Nguyen, et al., 2007, 2008; Nguyen & Sørensen, 2009)가 수 행된 바 있다.
국내연구의 경우, PID 제어이론과 칼만필터, 디지털필터를 이 용하여 드릴쉽의 DPS 모형시험 기법을 연구 (Lee & Ha, 2001) 한 사례가 있으며, 최적 제어이론인 LQR과 LQI 제어이론을 이용 하여 DP시스템의 제어기를 설계하는 연구 (Lee & Ha, 2003) 또 한 수행되었다.
국내외에서 연구된 제어 알고리즘은 고정된 되먹임 게인을 사 용하는 DP 제어 알고리즘으로 환경외란의 변화에 시행착오적으 로 게인을 조정해야한다는 단점을 갖기 때문에, 본 논문에서는 실시간으로 PID 게인을 조정하는 Fuzzy Gain Scheduling - PID (이하 FGS - PID) 제어 알고리즘을 제안하였다. 제안된 제어 알 고리즘은 Ziegler - Nichols 게인 조정법에 의해 결정된 초기 게 인과 퍼지 시스템에 의해 조정되는 게인 가중치의 곱으로 최종 게인을 실시간으로 조정하여 제어력을 결정한다. 제안된 제어알 고리즘의 타당성 검증을 위한 시뮬레이션 모델은 Matlab/Simulink를 활용하여 구축되었다. 해당 시뮬레이션 모델 은 PID 제어기, FGS - PID 제어기, 환경외력 모델, 추력 분배 알고리즘을 포함하고 있다. 두 제어기의 성능을 검증하기 위한 시뮬레이션은 3가지 조건에서 수행되었으며, Case 1에서는 환경 외란이 작용하지 않을 때 제어 대상의 스텝 응답성능 비교하고 Case 2, Case 3에서는 두 가지 해상 환경 조건에서 제어대상의 Station keeping 성능 및 Power 소모량을 비교하였다.
2. PID 및 Fuzzy Gain Scheduling 제어 이론
2.1 PID 제어기 구성
PID 제어기의 구성도는 다음과 같다.
Fig. 1 Block diagram of PID controller
는 오차를 나타내며 기준입력값인 Ref.와 출력값인
사이의 차에 의한 값이다. 는 비례 게인, 적분 게인, 미 분 게인으로써 각각 오차 , 적분오차
, 오차의미분 에 비례한 제어작용을 한다. 따라서 제어대상에 작용하 는 제어입력은 다음과 같은 식으로 나타난다 (Zhao, 1993).
(1)
2.2 PID 게인 증가에 따른 스텝응답 특성 변화
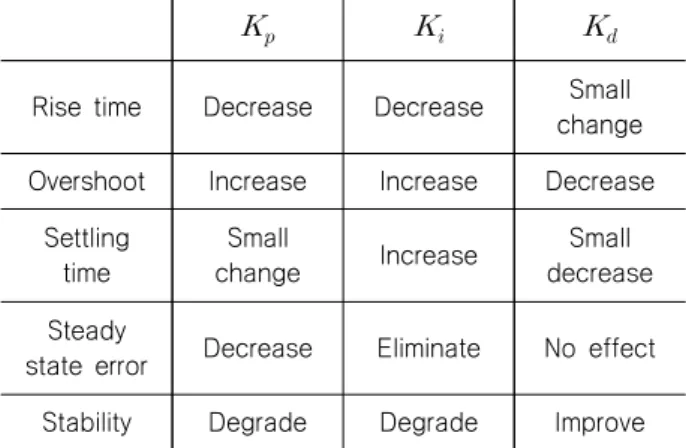
비례, 적분, 미분 게인의 증가에 따라 스텝응답 특성은 Table 1과 같이 변화하게 된다.
Rise time Decrease Decrease Small change Overshoot Increase Increase Decrease
Settling time
Small
change Increase Small decrease Steady
state error Decrease Eliminate No effect Stability Degrade Degrade Improve Table 1 Effects of increasing gains on the step response
가 증가하면 상승시간(rise time)이 줄어들고 정상상태 오차(steady state error) 감소에 영향을 미치지만 오버슈트 (overshoot)가 증가하게 되며 안정성(stability)이 저하된다. 그에 반해 가 증가하게 되면 오버슈트를 감소시키며 안정성을 향 상시킨다 (Jinghua, 2006).
2.3 Fuzzy gain scheduling 알고리즘 구성
Fuzzy gain scheduling 알고리즘을 구성하는 퍼지 시스템은 다음과 같다.
Fig. 2 Fuzzy system of fuzzy gain scheduling algorithm
퍼지 시스템의 입력과 출력은 크리스프 값(crisp value)을 이 용하며 입력은 오차와 오차의 미분 이고 출력은 게인
가중치 ′′′이다. 퍼지 시스템은 4부분으로 구성되어 있 다. 첫번째, 퍼지화(fuzzification)는 크리스프 입력을 퍼지화된 입력(fuzzified input) 으로 바꾼다. 두번째, Rule base는 추론을 하기 위한 ′ ′형식의 규칙 집합이다. 세번째, 퍼지 추 론 유니트(fuzzy inference unit)는 퍼지화로부터 얻어진 퍼지 입 력과 Rule base의 규칙들을 이용하여 퍼지 결론(fuzzy conclusion)을 추론하는 부분이다. 네번째, 비퍼지화 (defuzzification)는 퍼지 결론을 크리스프 출력으로 바꾼다 (Kevin & Stephen, 1998).
3. Fuzzy Gain Scheduling - PID 제어기 설계
3.1 Fuzzy Gain Scheduling – PID 제어기 구성
FGS – PID 제어기의 전체적인 구성은 다음과 같다.
Fig. 3 Block diagram of FGS – PID controller FGS – PID 제어기는 Ziegler – Nichols 게인 조정법을 이용하 여 초기 고정게인 을 결정하며, 퍼지 시스템을 이용하 여 입력에 따라 실시간으로 게인 가중치를 결정한다. 최종 게인
은 초기 고정게인과 게인 가중치와의 연산 과정을 통 해 실시간으로 조정된다.
3.2 초기 고정 게인 결정
본 논문에서는 초기 고정 게인을 결정하는 방법 중 간단하게 게인을 조정할 수 있어 산업 공정에서 많이 사용되는 Ziegler – Nichols 게인 조정법을 사용한다.
임계 비례 게인 ()은 적분, 미분게인이 없는 상태에서 제어 대상의 응답이 임계 진동일때의 비례게인 값이며 임계 진동 주기 ()는 임계 진동이 나타날 때의 진동 주기이다. 본 논문에서는 외란이 없는 상태에서 선박의 Surge, Sway, Yaw방향의 움직임 이 각각 임계 진동할 때까지 시행착오적으로 비례 게인값을 증가 시켜 임계 비례게인을 결정하였다. 이 두 값이 결정되면 Table 2 (Anthony & Keith, 1998)를 이용하여 초기 고정게인을 결정한다.
Table 2 Tuning of PID gains using Ziegler – Nichols
method
3.3 게인 가중치 결정
퍼지 시스템의 출력인 게인 가중치는 최종 게인의 실시간 조 정을 위해 초기 고정 게인에 곱해지는 값으로 다음과 같은 과정 으로 구해지게 된다.
3.3.1 소속도 함수 (Membership function)
입력 변수의 소속도 함수는 다음과 같다.
Fig. 4 Membership functions of input variables 이때에 NB는 Negative Big, NM은 Negative Moderate, NS는 Negative Small, ZO는 Zero, PS는 Positive Small, PM은 Positive Moderate, PB는 Positive Big을 나타내는 퍼지집합 (fuzzy sets)이며, 입력값이 퍼지집합에 속하는 정도를 소속도 라고 하며 0과 1사이의 값을 지닌다. 또한 소속도 함수의 입력변 수 구간 은 제어 대상의 이동 구간 및 속도 구간을 고려하 여 결정하였다.
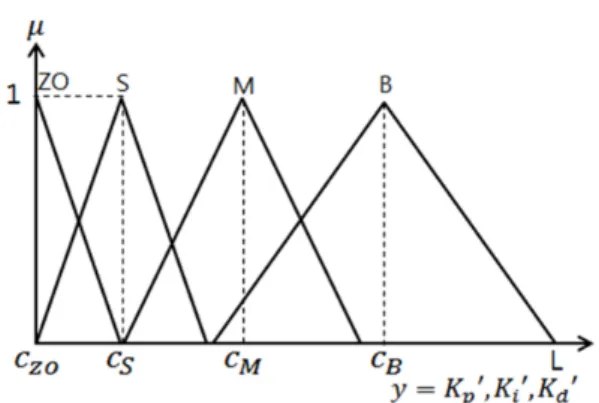
출력 변수의 소속도 함수는 다음과 같다.
Fig. 5 Membership functions of output variables Fig. 5에서 출력변수 소속도 함수 중심값() 사
이의 간격은 점점 넓어지도록 설정하였다. 소속도 함수 중심값 사이 간격이 동일하다면 입력변수( )가 일정히 커질수록 출력변수 값도 비례하게 커지지만, 그 간격을 점점 넓어지도록 설정한다면 동일한 상황에서 출력변수는 더욱 큰 값을 갖게 된 다. 따라서 외란이 있는 경우 제어대상의 제어성능은 소속도 함 수 중심값 사이 간격이 넓어지도록 설정 할 때에 더욱 향상된다 (Kevin & Stephen, 1998). 출력변수 소속도 함수 구간 은 제어대상의 제어 성능을 고려하여 시행착오적으로 반복 수행 하여 결정하였다.
3.3.2 Rule base
Rule base는 다음과 같은 형식을 갖는다 (Kevin & Stephen, 1998).
3
, 2 , 1
, , , ) ( , ) (
m i
E is K D is K C is K T h en B is t e A is t e
If i i p i i i d i
(2)
이때 는 입력 퍼지집합이고 는 출력 퍼지집합을 나타낸다. 게인 가중치의 결정을 위한 Rule은 게인들의 특징을 고려하여 정의하였으며 다음 그림은 스텝응답곡선을 통해 Rule 을 정의하는 예시를 보여준다.
Fig. 6 Example of step response curve
① 구간은 가 PB이고 가 NB이기 때문에 ′은 B,
′′는 ZO이다. ② 구간은 와 가 NB이기 때문에
′은 B, ′는 ZO, ′는 B이다. ③ 구간은 와 가 ZO이기 때문에 ′′는 B, ′는 ZO이다. 위와 같이 결정된 49개의 Rule을 각 출력 변수에 대하여 Rule table 및 Rule Surface로 나타내면 다음과 같다.
Table 3 Rule table for ′
′
NB NM NS ZO PS PM PB
NB B B B B B B B
NM M B B B B B M
NS S M B B B M S
ZO ZO S M B M S ZO
PS S M B B B M S
PM M B B B B B M
PB B B B B B B B
Fig. 7 Rule surface for ′
과도응답 구간 및 정상상태 구간에서 비례게인 가중치는 제어 입력에 중요한 역할을 하기 때문에 전반적인 구간에서 비례게인 가중치는 큰 값을 갖도록 Rule을 결정하였다.
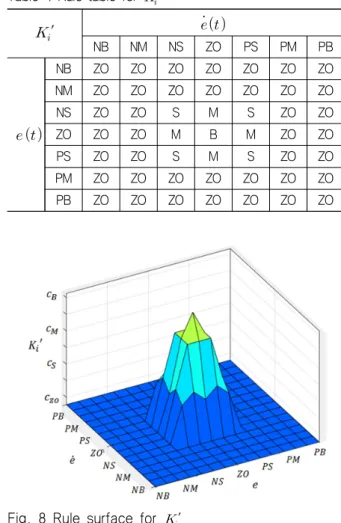
Table 4 Rule table for ′
′
NB NM NS ZO PS PM PB
NB ZO ZO ZO ZO ZO ZO ZO
NM ZO ZO ZO ZO ZO ZO ZO
NS ZO ZO S M S ZO ZO
ZO ZO ZO M B M ZO ZO
PS ZO ZO S M S ZO ZO
PM ZO ZO ZO ZO ZO ZO ZO
PB ZO ZO ZO ZO ZO ZO ZO
Fig. 8 Rule surface for ′
적분게인 가중치는 와 가 부근인 정상상태 구간에 서 큰 값을 갖고 그 외의 구간에서는 의 값을 갖도록 Rule을 결 정하였다.
Table 5 Rule table for ′
′
NB NM NS ZO PS PM PB
NB B B M M ZO ZO ZO
NM B M M S ZO ZO S
NS M M S S ZO S S
ZO M S S ZO S S M
PS S S ZO ZO S M M
PM S ZO ZO ZO M M B
PB ZO ZO ZO ZO M B B
Fig. 9 Rule surface for ′
미분게인 가중치는 오버슈트가 생기는 구간에서 큰 값을 갖도 록 Rule을 결정하였다.
3.3.3 퍼지 추론
퍼지 추론의 첫번째 단계는 다음과 같다. 퍼지화로부터 주어 진 입력을 퍼지 집합으로 바꾸며 Rule base로부터 각 규칙의 전 반부 적합도가 결정된다. 이때 적합도를 구하기 위한 퍼지 연산 은 min 연산을 이용하였고 번째 Rule에 대한 일 때 전반 부 적합도()는 다음과 같이 구한다.
∧ (3)
전반부 적합도를 후반부 퍼지집합에 반영하여 각개 규칙의 추 론 결과를 구하는 퍼지 연산은 min 연산을 이용하였고 번째 규 칙에 대한 추론 결과는 다음과 같다.
′ ∧
(4) m개의 규칙에 대해서 최종적인 추론 결과는 다음과 같이 구해
지며 이는 각 규칙에서 구해진 값 중에서 가장 큰 값을 취하는 max 연산을 이용한다.
∨
⋯
(5) 3.3.4 비퍼지화
최종추론결과는 퍼지집합이며 이를 크리스프 출력값으로 변환 해주어야한다. 본 연구에서는 무게중심법으로 퍼지 결론의 무게 중심을 출력값으로 변환하였으며 무게중심법 식은 다음과 같다.
∙ (6)
는 무게중심법으로부터 연산된 출력값이며 본 연구에서는 위의 식으로부터 게인 가중치가 출력값으로 결정된다.
3.4 최종 게인 결정
최종 게인은 다음 식과 같이 초기 고정 게인과 게인 가중치의 곱으로 실시간 결정되며 FGS - PID 제어기의 최종적인 게인값 으로 활용된다.
×′
×′ (7)
×′
4. 시뮬레이션 모델 구축
4.1 제어대상 및 환경외란
4.1.1 제어대상
본 연구에서 Dynamic positioning 제어 알고리즘의 제어대상 은 FPSO 선박이며 주요 제원은 다음과 같다.
4.1.2 환경외란
제어대상에 작용하는 환경외란은 조류, 바람, 파도에 의한 외 란 3가지이며, 환경외란을 고려한 좌표계는 다음과 같다.
Item Principal dimensions
L 200 m
B 44 m
T 12 m
100410 ton
Table 6 Principal dimensions of FPSO
Fig. 10 Definition of coordinate system for FPSO 제어대상의 좌표계는 지구고정 좌표계와 선박고정 좌표 계를 이용하며 는 외란과 제어대상의 선수 방향과의 상대 각도, 는 좌표계사이의 각도, 는 외란 방향을 나타낸다. 환 경외란을 고려한 선체 운동방정식은 다음과 같다.
(8)
exp
(9)
여기서 는 선체고정좌표계에서 선박의 속도 및 각속도를 의미 하며, ,는 지구고정좌표계에서 선박의 위치 및 선수각 그리고 속도 및 선수각속도를 각각 의미한다. 는 좌표계 변환 행렬 이며, 은 선체의 질량 및 부가질량의 합을 의미하는 질량행렬 이다. 는 Coriolis - centripetal 행렬, 는 선형 감쇠행 렬이며 는 비선형 감쇠행렬이다. 이때에 은 조류에 대한 선박의 상대속도이며, 는 조류에 대한 선박의 상대 속력 및 방향을 의미한다. 또한 는 선박에 작용 하는 제어력, 바람 및 파도에 의한 외력을 각각 의미한다 (Thor, 2011).
4.2 FGS - PID 제어기
본 연구에서는 FGS - PID 제어기를 이용하여 제어력
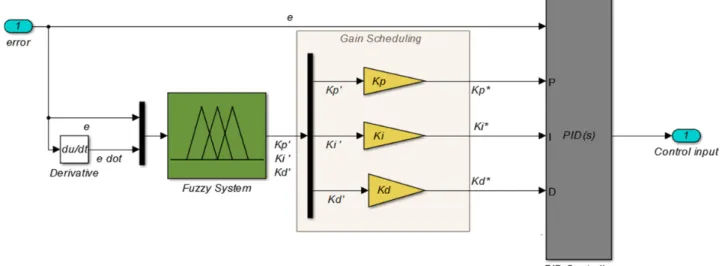
를 생성하는 방법을 제안하였으며, 수치 시뮬레이션을 위하여 Simulink/Matlab을 이용하여 FGS- PID 제어기 모델을 구축하였 다. 제어 대상의 목표 위치 및 선수각 은
이며 오차 및 오차의 미분값은 목표값과 제어대상 출력 값과의 차이로부터 결정되고 이는 FGS - PID 제어기의 입력변 수가 된다. Fig. 12는 FGS - PID 제어기의 구성도를 나타낸 그 림이며, 퍼지 시스템은 입력변수 ( )로 부터 게인 가중 치 (′′′)를 출력한다. 최종 게인 ()은 게인 가중치와 초기 고정게인 ()과의 곱에 의해 결정된다.
제어입력은 최종 게인을 PID 제어기의 게인값으로 이용하여 생 성된다.
4.3 추력분배 알고리즘
추력 분배 알고리즘은 추력 최소화를 위한 최적 분배 방법으 로 라그랑지 승수법 (Lagrange Multiplier)을 이용하였다. 6대의 추력기는 모두 아지무스(Azimuth) 추력기이며, 추력기의 배치 및 최대 추력은 Fig. 11, Table 7과 같다.
Fig. 11 Thruster layout of FPSO with azimuth thrusters
Fig. 12 Block diagram of fuzzy gain scheduling - PID controller
Thruster Location
Max Power
X Y
No.1 -90 m 18 m 8 MW
No.2 -85 m 0 m 8 MW
No.3 -90 m -18 m 8 MW
No.4 90 m 18 m 8 MW
No.5 95 m 0 m 8 MW
No.6 90 m -18 m 8 MW
Table 7 Location and max power of thrusters
5. 시뮬레이션 조건 및 결과
5.1 시뮬레이션 조건
Table 8 Three cases for simulations
Case 1 Case 2 Case 3
- 1.25 m/s 1.54 m/s
- 2 m 6.4 m
- 6.3 s 11 s
- 11.5 m/s 24 m/s
본 논문에서는 PID 제어기와 FGS – PID 제어기 모두 초기 게 인값이 같은 조건에서 두 제어기를 적용한 모델을 사용하여 시뮬 레이션을 수행하였다. 3가지 Case의 시뮬레이션 조건을 나타내 는 표는 Table 8과 같다. Case 1은 환경외란이 작용하지 않을 때이며, Case 2, Case 3는 환경외란이 다른 2가지 조건을 나타 낸다. Case 2의 환경외란은 central GOM(Gulf of Mexico) 지역 의 1 year Loop current 조건이며, Case 3의 환경외란은 central GOM 지역의 10 year Winter storm 조건이다. 또한 파도에 의한 외란은 JONSWAP Wave spectrum, 바람에 의한 외란은 Blendermann의 Wind force coefficient (Blendermann, 1994)를 이용하였고 조류, 파도, 바람의 방향은 모두 같게 설정하였다.
5.2 시뮬레이션 결과
Case 1과 Case 2에서는 Ziegler - Nichols 게인 조정법을 이 용하여 초기 고정게인을 결정하였으며, Case 3에서는 Case 1과 Case 2보다 거친 환경외란 조건이기 때문에 더 큰 제어입력을 얻기 위하여 초기 고정게인은 Case 1, Case 2보다 더 큰 값으로 결정하여 이용하였다.
Case 1에서는 제어기 성능 검증을 위해 스텝응답곡선 및 스 텝응답성능을 비교하고, Case 2와 Case 3에서는 제어 대상의 최대 운동 반경, 최대 선수각, 평균 Power 소모량을 Dynamic positioning 성능의 기준으로 정의하여 제어기의 성능을 검증하 였다.
5.2.1 Case 1
환경외란이 작용하지 않을 때 PID 제어기와 FGS - PID 제어 기를 이용한 선박의 x position에 대한 스텝응답 곡선은 다음과 같다.
Fig. 13 Step response for x position
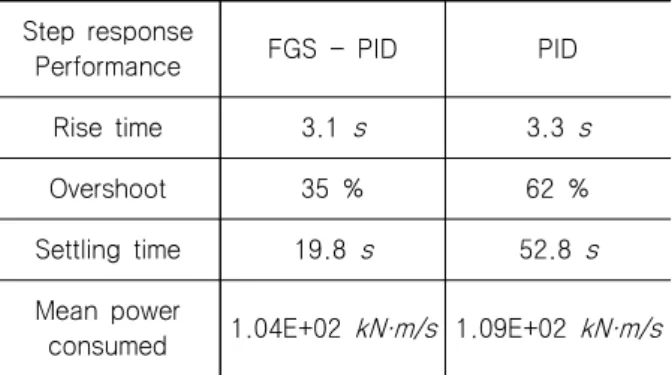
두 제어기의 스텝응답특성인 상승시간(rise time), 오버슈트 (overshoot), 정착시간(settling time)과 제어를 위해 소모된 평균 Power(mean power consumed)에 대한 비교는 다음 표와 같다.
Table 9 Result of step response performance and mean power consumption for FGS - PID &
PID controllers Step response
Performance FGS - PID PID
Rise time 3.1 s 3.3 s
Overshoot 35 % 62 %
Settling time 19.8 s 52.8 s Mean power
consumed 1.04E+02 kN·m/s 1.09E+02 kN·m/s
스텝응답성능 비교를 통한 제어기의 성능은 FGS – PID 제어 기가 PID 제어기보다 상승시간과 정착시간이 빠르며 소모되는 평균 Power도 적음을 확인하였다. FGS – PID 제어기의 게인 가 중치(′′′)는 시간에 따라 Fig. 14와 같이 변화한다.
위의 결과로부터 과도응답 구간에서 미분게인 가중치 값이 커 지고, 정상상태 구간에서 적분게인 가중치의 값이 커지는 것을 확인하였다. 비례게인 가중치 또한 앞서 정의한 Rule base에 따 라 값이 변화하는 것을 확인하였다.
Fig. 14 The variation of ′′′
5.2.2 Case 2
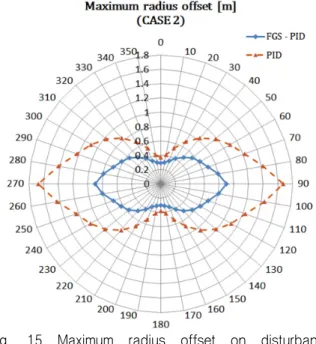
환경외란의 방향 ()은 ∘∼ ∘사이에서 ∘간격으로 고려하였으며 외란방향에 대한 제어 대상의 최대 운동 반경, 최대 선수각, 평균 Power 소모량은 Fig. 15, Fig. 16, Fig. 17과 같다.
Fig. 15 Maximum radius offset on disturbance directions ranging from 0 to 350 degree 운동반경 (Radius offset)은 으로 정의하여 원점으 로부터 떨어진 제어대상의 위치를 나타내도록 하였으며 선박의 제어 성능은 운동반경이 클수록 좋지 않다. 이때에 두 제어기의 최대 운동반경은 Fig. 15로부터 확인할 수 있으며, 모든 외란 방 향에 대한 최대 운동반경 평균은 FGS – PID 제어기가 0.53(m), PID 제어기가 0.91(m)이다. 즉, FGS - PID 제어기를 이용한 선 박이 PID 제어기를 이용한 것보다 평균적으로 약 1.7배 더 작은 최대 운동반경을 갖는다는 것을 확인하였다.
선박의 최대 선수각(maximum heading angle)은 시뮬레이션 동안 목표 선수각과 선박의 선수각 차이가 최대인 선수각을 의미
하며 최대 선수각이 클수록 선박의 제어 성능은 좋지 않다. Fig.
16은 모든 외란방향에 대해서 두 제어기를 이용한 선박의 최대 선수각을 보여준다. 모든 방향에 대한 최대 선수각 평균은 FGS - PID 제어기가 0.9(deg), PID 제어기가 3.5(deg)이다. 즉. FGS - PID 제어기를 이용한 선박은 PID 제어기를 이용한 것보다 평균적 으로 약 4배 더 작은 최대 선수각을 갖는다는 것을 확인하였다.
Fig. 16 Maximum heading angle on disturbance directions ranging from 0 to 350 degree
Fig. 17 Mean power consumption on disturbance directions ranging from 0 to 350 degree 선박의 평균 Power(mean power)는 시뮬레이션동안 소모된 Power의 평균치로써 그 값이 적을수록 선박의 제어기 효율은 좋 다. Fig. 17은 모든 외란 방향에 대한 두 제어기의 소모된 평균 Power를 보여준다. 모든 외란방향에 대한 평균 Power의 평균은
FGS – PID 제어기가 3.8E+04(kN·m/s), PID 제어기가 1.3E+05 (kN·m/s)이다. 즉, FGS - PID 제어기를 이용한 선박이 PID 제어 기를 이용한 것보다 평균적으로 약 3.5배 더 적은 평균 Power를 소모한다는 것을 확인하였다.
Case 2에서 FGS - PID 제어기는 PID 제어기보다 최대 운동 반경과 최대 선수각이 약 1.7배, 4배 더 작으면서 소모된 평균 Power도 약 3.5배 더 적음을 확인하였다. 즉, FGS - PID 제어기 는 PID 제어기보다 효율이 더 좋음을 확인하였다.
5.2.3 Case 3
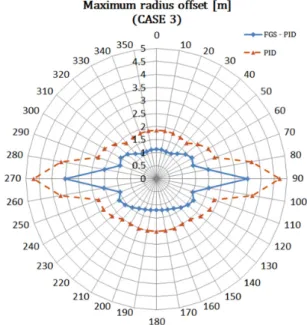
Case 3는 Case 2보다 거친 환경외란 조건이며 이에 대한 선박 의 최대 운동 반경, 최대 선수각, 소모된 평균 Power는 Fig. 18, Fig. 19, Fig. 20과 같다. 또한 임의의 외란방향에 대한 두 제어기 를 이용한 선박의 위치 및 선수각, 수평면상 움직임, 두 제어기의 게인가중치 시계열 변화는 Fig. 21, Fig. 22, Fig. 23와 같다.
Fig. 18 Maximum radius offset on disturbance directions ranging from 0 to 350 degree Fig. 18은 두 제어기를 이용한 선박의 최대 운동반경을 모든 방향에 대해서 보여준다. 모든 외란방향에 대한 최대 운동반경의 평균은 FGS - PID 제어기가 1.5(m), PID 제어기가 2.4(m)이다.
즉, FGS - PID 제어기를 이용한 선박이 PID 제어기를 이용한 것 보다 평균적으로 약 1.5배 더 작은 최대 운동반경을 갖는다는 것 을 확인하였다.
Fig. 19는 두 제어기를 이용한 선박의 최대 선수각을 모든 방 향에 대해서 보여준다. 모든 외란방향에 대한 최대 선수각의 평 균은 FGS - PID 제어기가 3.8(deg), PID 제어기가 7.3(deg)이 다. 즉, FGS - PID 제어기를 이용한 선박이 PID 제어기를 이용 한 것보다 평균적으로 약 1.9배 더 작은 최대 선수각을 갖는다는 것을 확인하였다.
Fig. 19 Maximum heading angle on disturbance directions ranging from 0 to 350 degree
Fig. 20 Mean power consumption on disturbance directions ranging from 0 to 350 degree Fig. 20은 두 제어기를 이용한 선박이 시뮬레이션동안 소모한 평균 Power를 모든 외란방향에 대해서 보여준다. 모든 외란 방 향에 대한 평균 Power의 평균은 FGS - PID 제어기가 1.3E+06(kN·m/s), PID 제어기가 3.1E+06(kN·m/s)이다. 즉, FGS - PID 제어기를 이용한 선박이 PID 제어기를 이용한 것보 다 평균적으로 약 2.3배 더 적은 평균 Power를 소모한다는 것을 확인하였다.
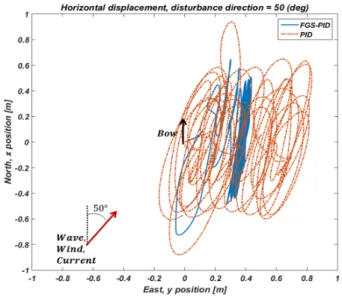
Fig. 21, Fig. 22, Fig. 23은 외란방향이 50인 경우에 시간 에 대한 선박의 위치 및 선수각, 수평면상에서 움직임 그리고 FGS - PID 제어기의 게인가중치를 보여준다.
Fig. 21은 시간에 대한 선박의 x, y 위치 및 선수각 을 각각 보여준다. 선박의 x위치는 0~50초에 두 제어기가 차이를 보이지 만, 그 이후 비슷한 경향을 갖는 것을 확인하였다. 선박의 y위치
는 FGS - PID 제어기가 PID 제어기보다 일정한 값에 더 빨리 수 렴하고 선박의 y방향 운동반경 또한 더 작음을 확인할 수 있지 만, FGS - PID 제어기는 약 0.3(m)로 수렴하는 반면에 PID 제어 기는 0(m)로 수렴함을 확인하였다. 선박의 선수각 는 FGS - PID 제어기가 PID 제어기보다 0에 더 빨리 수렴하는 것을 확 인하였다.
Fig. 21 Displacements of simulation on case 3 Fig. 22는 시뮬레이션 시간동안 선박의 수평면상 움직임을 보 여준다. FGS - PID 제어기는 PID 제어기보다 최대 운동반경이 작은 것을 확인할 수 있다.
Fig. 22 Horizontal displacement on case 3
Fig. 23에서 실선은 실시간으로 조정되는 FGS - PID 제어기 의 게인가중치를 나타내며, 점선은 PID 제어기의 게인가중치를 보여준다. FGS - PID 제어기는 오차 및 오차의 미분값에 따라 게인가중치가 변화하지만 PID 제어기는 고정된 초기 게인을 이 용하기 때문에 PID 제어기의 게인가중치는 시간에 관계없이 1이 다. 단, 실제로 PID 제어기의 게인가중치는 존재하지 않지만, FGS - PID 제어기의 게인가중치와 비교를 위해 나타내었다.
Fig. 23 Variation of ′′′ on case 3
Fig. 21, Fig. 22, Fig.23으로부터 시뮬레이션동안 두 제어기 를 이용한 선박의 위치 및 선수각 변화, 수평면상 움직임 그리고 게인가중치의 변화를 확인할 수 있었다. FGS - PID 제어기는 실 시간으로 조정되는 게인가중치를 사용하기 때문에 PID 제어기보 다 작은 운동반경 내에서 움직임을 확인하였다.
하지만 FGS - PID 제어기는 y방향의 제어력이 부족하여 목표 위치이 아닌 으로 수렴함을 보였다. 이는 적분 게 인 가중치(′)를 결정하는 출력변수의 소속도함수 중심값을 작 게 설정하였기 때문이며, 시행착오적으로 이를 더 크게 설정하면 선박의 수렴위치는 목표위치에 가깝도록 개선될 수 있다.
6. 결 론
본 논문에서는 다양한 환경외란 조건을 고려하여 PID 게인을 실시간으로 조정하고 제어력을 결정하는 DP 제어 알고리즘으로 FGS - PID 제어이론을 이용하여 제안하였다.
또한 퍼지 시스템의 Rule은 PID 게인이 제어 대상의 응답에 미치는 영향을 고려하여 정의하였고, 이를 이용하여 퍼지 시스템 의 출력인 게인 가중치(′′′)를 결정하고, Ziegler - Nichols 게인 조정법에 의해 결정된 초기 게인()과의 곱으로 최종 게인()을 실시간으로 조정하였다.
제안된 제어 알고리즘의 성능을 검증하기 위해 FGS - PID 제 어기 및 PID 제어기, 제어대상, 환경외란, 추력분배 알고리즘의 시뮬레이션 모델을 구축하였고, 환경외란이 작용하지 않는 경우 와 환경외란 조건이 다른 2가지 경우에 대하여 시뮬레이션은 수 행되었다.
본 연구를 통하여 얻어진 결론은 다음과 같다.
첫째, 실시간으로 PID 게인 조정이 가능한 Fuzzy Gain Scheduling - PID(FGS - PID) 제어 알고리즘을 아용한 동적 위 치 유지 제어 기법을 제안하고 시뮬레이션을 통하여 그 유효성을 검증하였다.
둘째, 외란이 없는 경우의 스텝응답 시뮬레이션을 통하여 제 안하는 FGS - PID 제어기가 PID 제어기보다 상승시간, 오버슈
트, 정착시간, 평균 Power 소모량이 우수한 것을 확인하였다.
셋째, 외란이 작용하는 경우의 위치 및 선수각 유지 시뮬레이 션을 통하여 모든 외란 조건에서 실시간 게인 조정이 가능한 FGS - PID 제어기가 PID 제어기보다 선박의 위치 유지성능 및 선수각의 유지성능이 우수한 것을 확인하였다, 또한 위치 및 선 수각 유지에 필요한 평균 Power 소모량도 적음을 확인하였다.
향후에는 해상 환경 조건에 따라 제어기를 바꾸는 Supervisory - switching 제어 알고리즘과 FGS - PID 제어기를 비교하는 연 구와 추력기 고장 등의 상황에서 PID 제어기와 FGS - PID 제어 기의 고장 허용성능(Fault tolerance)을 비교하는 연구를 수행할 예정이다.
후 기
본 연구는 2013년 정부(교육부)의 재원으로 한국연구재단의 지 원을 받아 수행된 기초연구사업(NRF-2013R1A1A2005770) 및 산업통상자원부와 한국산업기술진흥원의 “한-영 해양플랜트 글로 벌 전문인력양성사업”의 지원을 받아 수행된 연구결과입니다.
References
Anthony S.M. & Keith, R.G., 1998. Rule-based autotuning based on frequency domain identification.
IEEE Transactions on Control Systems Technology, 6(1), pp.43-61.
Blendermann, W., 1994. Parameter identification of wind loads on ships. Journal of the Wind Engineering and Industrial Aerodynamics, JWEIA-51, pp.339-351.
Lee, D.Y. & Ha, M.G., 2001. An experimental method of model installed dynamic positioning system for drillship. Journal of the Society of Naval Architecture of Korea, 38(2), pp.33-43.
Lee, D.Y. & Ha, M.G., 2003. A study on the design parameters of controller for dynamic positioning system. Journal of the Society of Naval Architecture of Korea, 40(1), pp.8-19.
Fossen, T.I. & Strand, J.P., 2001. Nonlinear passive weather optimal positioning control (WOPC) system for ships and rigs: experimental results. Journal of the Automatica, 37(5), pp.701-715.
Jinghua, Z., 2006. PID controller tuning: A short tutorial. class lesson. Purdue University: Indiana.
Kevin, M.P. & Stephen, Y., 1998. Fuzzy control.
addison – Wesley Longman, Inc.: California.
Lindegaard, K.-P.W., 2003. Acceleration feedback in
dynamic positioning systems. Ph.D Thesis. NTNU.
Nguyen, T.D., 2006. Design of hybrid marine control systems for dynamic positioning. Singapore:
Department of Civil Engineering, National University of Singapore (NUS).
Nguyen, T.D. Sorensen, A.J. & Quek, S.T., 2007.
Design of hybrid controller for dynamic positioning from calm to extreme sea conditions. Journal of the Automatica, 43(5), pp.768–785.
Nguyen, T.D. Sorensen, A.J. & Quek, S.T., 2008.
Multi-operational controller structure for station keeping and transit operations of marine vessels.
Journal of the IEEE Transactions on Control Systems Technology, 16(3), pp.491-498.
Nguyen, D.T. & Sørensen, A.J., 2009. Switching control for thruster-assisted position mooring.
Journal of the Control Engineering Practice, 17(9), pp.985–994.
Sørensen, A.J. Strand, J.P. & Nyberg, H., 2002.
Dynamic positioning of ships and floaters in extreme seas. Proceedings of the Marine Technology Society and The Institute of Electrical and Electronics Engineers Oceans 2002, pp.1849-1854.
Sørensen, A.J. Quek, S.T. & Nguyen, T.D., 2005.
Improved operability and safety of DP vessels using hybrid control concept. Proceeding of the International conference on technology & operation of offshore support vessels (OSV 2005), pp.20-21.
Thor, I. Fossen., 2011. Handbook of marine craft hydrodynamics and motion control. Wiley & Sons:
West Sussex.
Zhao, Z.Y., 1993. Fuzzy gain scheduling of PID controllers. Journal of the Institute of Electrical and Electronics Engineers Transaction on Systems, Man and Cybertics, 23(5), pp.1392-1398.
전 마 로 김 희 수 김 재 학 김 수 정
송 순 석 김 상 현