접수일 2010. 1. 4, 수정완료일 2010. 2. 10, 게재확정일 2010. 2. 13
* 학생회원, 충남대학교 대학원 항공우주공학과
** 종신회원, 충남대학교 항공우주공학과
†교신저자, E-mail: [email protected]
硏究論文
GO
2/PE 하이브리드 로켓의 추력제어를 위한 시스템 설계 및 기초실험
이용우* ․ 강완규* ․ 허환일**†
System Design and Fundamental Experiment for Thrust Control of GO
2/PE Hybrid Rocket
Yong-Wu Lee* ․ Wan-Kyu Kang* ․ Hwanil Huh**†
ABSTRACT
In this study, basic research on the thrust control by controling oxidizer mass flow rate of a GO2/PE hybrid rocket is presented. For this purpose, hybrid rocket system including oxidizer flow control system and data acquisition system was developed. To control oxidizer mass flow rate, we used needle valve with stepping motor which was controled by LabVIEW program. During the fundamental experiments, this system managed to follow the pre-programmed (20 N - 10 N - 20 N - 0 N) thrust level.
초 록
본 연구에서는 하이브리드 로켓의 산화제 유량 제어를 통한 추력제어를 위한 기초 연구를 진행하였 다. 실험을 위해 하이브리드 로켓 모터와 산화제 유량 조절장치 그리고 데이터 획득을 위한 전체 시스 템을 설계, 제작하였다. 산화제 유량 제어를 하기 위해서 니들밸브와 스텝모터를 결합하여 스텝모터의 구동에 의해 니들밸브의 개폐량을 조절할 수 있도록 설계하였고 LabVIEW프로그램을 이용하여 스텝모 터를 컨트롤 하였다. 또한 기체산소(GO2)와 고체연료(Polyethylene)를 이용한 하이브리드 로켓의 연소 실험을 통해 산화제 유량 제어를 통한 하이브리드 로켓의 추력제어 가능성을 확인하였다.
Key Words: Hybrid Rocket(하이브리드 로켓), Stepping Motor(스텝모터), Thrust Control(추력제어), Oxidizer Flow Control System(산화제 유량 조절시스템)
1. 서 론 1930년대 후반 독일의 Lenoid Andrussow에 의해 처음 고안된 하이브리드 추진의 개념은 1960년대 후반까지 연구가 진행되었으나 저장성 과 간결성을 요하는 국방부분에서의 고체로켓 추진선택과 고성능의 임무능력을 요하는 우주개
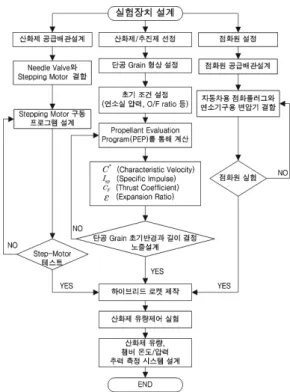
Fig. 1 Configuration of Hybrid Rocket System for Thrust Control Experiment
Fig. 2 Design Flowchart for Hybrid Rocket Thrust Control System
발부분의 액체로켓 추진 선택에 의해 많은 연구 를 진행할 수 없었다. 하지만 점점 치열해지는 우주개발 기술 경쟁에 의해 하이브리드 추진 시 스템에 대한 관심이 높아지고 있다. 하이브리드 추진이 기존에 추진 개념과 비교되어 주목받고 있는 이유는 고체로켓보다는 높고 액체로켓과 견줄만한 성능을 가지고 있으며, 산화제와 연료 가 분리되어 있어 고체/액체 추진 시스템에서 발생할 수 있는 폭발의 위험성이 없기 때문이다.
또한 추력제어가 용이하고 상황에 따라 고체 로 켓에서는 불가능한 점화 후 소화․재점화(stop and restart)가 가능하며 연소가스에 유해성분이 발생하지 않는 등 많은 장점을 가지고 있기 때 문이며, 향후 우주 개발에 사용될 목적으로 선진 국을 중심으로 활발히 연구가 진행되고 있다 [1,2].
전술미사일 및 우주발사체에 하이브리드 추진 시스템을 적용하는 연구가 미국, 일본 등을 중심 으로 진행되고 있으며, 국내에서도 건국대학교 [3], KAIST[4], 한국항공대학교[5], 그리고 충남대 학교 등의 대학을 중심으로 소형 하이브리드 로 켓의 연소 성능 향상을 위한 다양한 연구가 진 행되고 있다. 그러나 국내의 대부분의 하이브리 드 로켓 연구가 고체 연료의 연소 특성이나 추 력 향상 등에 초점을 맞추고 연구가 진행되고 있으며 하이브리드 로켓의 추력조절 및 재점화 의 가능성에 대한 측면은 연구가 부족한 실정이 다.
본 논문에서는 Lab-scale의 하이브리드 로켓을
설계․제작하고 니들밸브와 스텝모터를 이용한 산화제 유량 조절시스템을 구축하여 산화제 유 량 조절을 통한 하이브리드 로켓의 하이브리드 로켓의 추력제어 가능성을 확인하고, 시스템의 효용성을 살펴보려고 한다[6,7].
2. 하이브리드 로켓 실험장치 구성
하이브리드 로켓 추력제어 실험장치 구성은 Fig. 1에서 볼 수 있다. 본 연구의 핵심인 산화 제 유량제어를 위해 스텝모터와 니들밸브를 결 합한 산화제 유량제어 장치와 산화제 공급 배관, 하이브리드 로켓 모터와 점화 장치 그리고 추력 및 산화제 유량과 압력을 측정하기 위한 데이터 획득 장치(DAQ)로 구성되어 있다.
하이브리드 로켓 실험 장치 제작에 앞서 Fig.
2 의 순서도와 같은 설계 단계를 진행하였다[6].
실험장치의 제작에 앞서 우선 산화제와 추진
Fig. 4 Drawings of Hybrid Rocket Motor Propellant/Fuel Molecular weight
()
Density () Gaseous
Oxygen( GO2) 31.999 1.11
PE(Polyethylene) - 913.44
Table 1. Properties of Oxidizer and Solid Propellant 제 그리고 점화원을 설정한 뒤 그에 따른 공급 배관을 설계하였다. 본 논문의 핵심사항인 산화 제 유량제어를 위해 니들밸브(Needle Valve)에 스텝모터(Stepping Motor)를 장착하여 이를 구 동하기 위한 프로그램을 제작하고, 테스트를 통 해 유량 조절에 대해 확인할 수 있었다. 하이브 리드 로켓의 점화원으로 부탄가스를 사용하였고, 점화장치로서 자동차용 점화플러그와 가스보일 러용 변압기를 결합하여 점화 신뢰성을 확보하 였다. 그레인의 형상과 하이브리드 로켓의 초기 조건을 설정하여 하이브리드 로켓을 제작한 뒤 산화제 유량제어 실험을 수행하였다.
2.1 하이브리드 로켓
본 연구에서는 당초 기체 산화제와 고체 추진 제로 기체산소(GO2)와 HTPB(Hydroxyl-Terminated Polybutadiene)를 이용하여 연소실 압력 14 bar, 추력 130 N급의 하이브리드 로켓 설계를 진행하 였으나 안전상의 문제와 연구 진행 방향이 추력 성능보다는 추력 제어에 중점을 두고 있기 때문 에 HTPB보다는 추력성능이 낮지만 취급성과 안 전성이 좋은 PE(Polyethylene)로 고체 추진제를 변경하여 연소실 압력 7 bar, 추력 50 N급으로 하이브리드 로켓을 설계하였다. 공급 산화제와 고체 추진제의 물성치는 Table 1에서 볼 수 있다.
연소실 압력과 예상 공연비(O/F ratio)를 통해 Fig. 3의 PEP프로그램을 이용하여 C*(characteristic velocity) 1311.3 m/s,
(specific impulse)157 초,
(thrust coefficient) 1.175, ε(nozzle expansion ratio) 1.78 등의 데이터를 산출하고, 이 데이터를 이용하여 추진제의 형태, 초기 반경, 길이 그리 고 노즐을 설계 하는데 사용하였다.Fig. 3 PEP(Propellant Evaluation Program)
추진제 설계에 사용한 수식은 아래의 Eq. 1~
3과 같으며 Eq. 4는 노즐 설계에 사용한 수식이 다[8,9].
(1)
(2)
(3)
(4)
⦁ = port radius at any time (m)
⦁ = initial port radius (m)
⦁ = port length (m)
⦁ = nozzle expansion ratio
Figure 4와 같이 하이브리드 로켓은 점화를 위
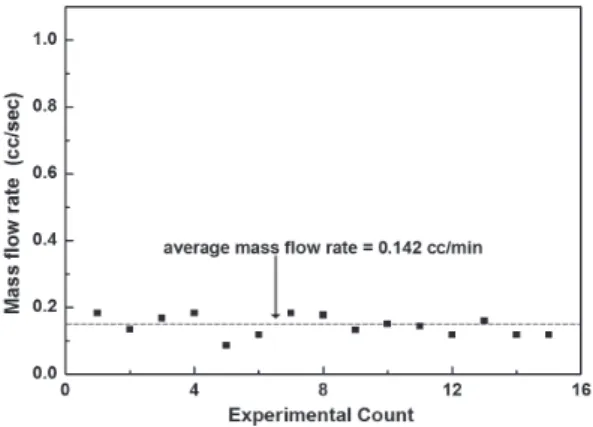
Fig. 5 Assembled Hybrid Rocket Motor Fig. 7 Configuration of Oxidizer Supply system Fig. 6. Results of Experiment for Butane Gas Mass
Flow Rate Measurement 한 부탄 배관과 점화플러그를 장착하기 위한 예
연소실(pre-combustion chamber), 고체 추진제를 장착하기 위한 연소실(combustion chamber), 후 방연소공간으로 사용하기 위해 설계된 후방 연 소실(post-combustion chamber) 그리고 노즐을 장착하기 위한 노즐 케이스로 구성되어 있다. 각 부분에 있는 플랜지(flange)사이에 개스킷(gasket) 을 두고 볼트를 이용하여 부분별로 고정하였다.
로켓 모터 제작에 사용된 재질은 열전도율이 낮 은 stainless steel 304를 사용하였다. 아래의 Fig.
5는 제작된 하이브리드 로켓 모터 형상이다.
2.2 점화장치
본 연구에서 점화장치는 일반 자동차용 점화 플러그에 변압기를 연결하여 사용하였다. 220 V 의 전기를 10 kV로 증폭하여 하이브리드 로켓이 점화되는 과정 동안에 점화 플러그에서 지속적 인 스파크가 발생할 수 있도록 제작하였고 로켓 모터 예연소실 쪽에 장치하였다. 점화장치는 부 탄을 연결할 수 있는 커넥터(connector)와 부탄 가스 공급을 제어하는 볼 밸브(ball valve)와 솔 레노이드 밸브(solenoid valve), 역화 방지용 체 크 밸브(check valve) 그리고 점화플러그로 구성 되어 있다. 점화방식은 우선 산화제를 분사하여 하이브리드 로켓 모터 내에 일정량의 산소가 유 입되는 상태에서 점화플러그를 작동한 다음 부 탄가스를 공급하여 점화를 시킨 뒤 점화플러그 와 부탄의 공급을 중단하였다. 이와 같은 점화방
식은 연소실 내에서 부탄가스와 산화제의 예혼 합(premixing) 현상을 최소화하여 점화 시에 발 생하는 소음을 줄이는 장점이 있다. 부탄가스는 점화원으로서의 역할이므로 가능한 적은 유량으 로 점화가 가능한 유량을 측정하기 위해 볼 밸 브의 회전각을 12°로 고정한 후 열식유량계 (thermal mass flow meter)를 이용하여 산화제 공급압력을 300 psi 상태에서 실험한 결과 Fig.
6에서 볼 수 있듯이 평균 0.142 cc/sec의 유량에 서 점화신뢰성이 확보된다는 점을 알 수 있었다.
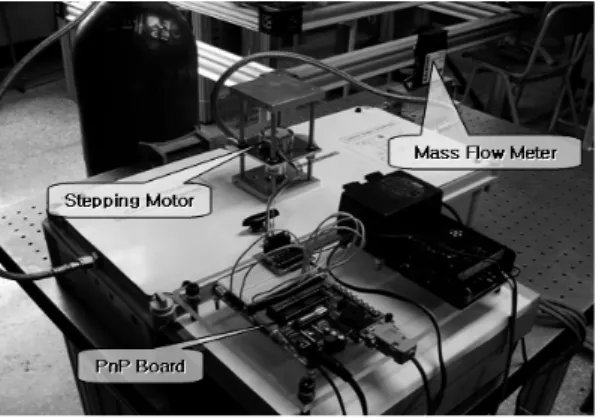
2.3 스텝모터를 장착한 산화제 공급배관
전체 산화제 공급배관의 직경은 1/4 인치 (6.35 mm)배관으로 구성되어 있다. 산화제 공급 배관은 아래의 Fig. 7과 같이 구성하였다.
산소 탱크의 압력 조절을 위한 레귤레이터, 압 력 센서, 산화제 유량 제어를 위해 스텝모터를 장착한 니들밸브와 솔레노이드 밸브, 역화방지용
Fig. 10 Thrust Measurement Device 체크밸브 그리고 기체 산화제의 유량을 측정하
기 위한 MFM(Mass Flow Meter)로 구성되어 있 다. 니들밸브에 스텝모터(오토닉스사, AH4K-S564) 를 장착하여 산화제의 유량을 제어하기 위한 스 텝모터의 구동은 스텝모터 컨트롤러를 통해 컴 퓨터 신호에 의해 구동되도록 하였다. 스텝 모터 의 회전에 의해 니들밸브의 개폐량이 조절되도 록 연결장치를 제작하여 두 장치를 연결하였다.
니들밸브가 회전하면서 스텝모터의 상하운동이 가능하도록 스텝모터를 알루미늄 판을 부착하고, 이 판과 연마봉 사이에 마찰력을 최소화하기 위 하여 베어링을 장착하여 산화제의 유량을 조절 가능하도록 제작하였다. Fig. 8에서 스텝모터와 니들밸브의 형상, 그리고 Fig. 9는 각각의 장치 를 결합한 형상이다.
Fig. 8 Stepping Motor and a Needle Valve
Fig. 9 Assembled Stepping Motor and Needle Valve
2.4 데이터 획득(DAQ) 장치
실험을 통해 얻어지는 데이터는 산화제 유량 과 가압압력 그리고 연소실 압력과 추력이다. 산 화제의 유량제어는 추력데이터를 통해 이루어진 다. 사전에 입력된 추력 명령 값과 실제 데이터 획득 장치(DAQ)를 통하여 측정된 추력과의 비 교를 통해 산화제의 유량이 제어된다. 각 센서들 은 voltage 값으로 A/D Converter에 의해 저장 된다. LabVIEW(ver7.1) 프로그램을 이용하여 실 험에 대한 데이터를 저장할 수 있도록 제어창을 구성하였다.
2.5 추력측정장치
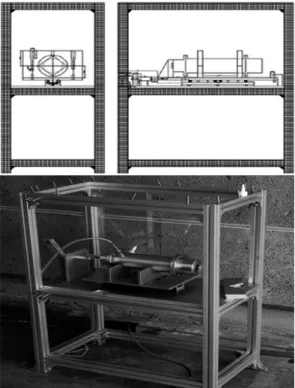
추력측정장치 외부에 방폭필름을 부착하여 만 일의 경우에 발생할 수 있는 안전사고를 대비하 여 설계, 제작하였다. 하이브리드 로켓의 추력을 측정하기 위해서 하이브리드 로켓 모터 아래에 LM 가이드를 설치하였다. 아래의 Fig. 10은 추 력측정장치의 도면과 실제 하이브리드 로켓을 장착한 추력측정장치의 형상이다.
Chamber
Pressure () 7 bar Estimate
Thrust(N) 5.73 Nozzle Type Conical
Type
Expansion
Ratio () 1.57 Contraction
Angle() 30° Nozzle Exit
Mach Number 1.91 Divergent
Angle() 15° Mass Flow
Rate (g/s) 11.4 Table 2. Design Numbers of Cold-Gas Thruster 3. 산화제 유량 조절 실험
스텝모터의 구동에 의해 니들밸브 개폐량 변 화에 따라서 산화제의 유량 변화를 확인하기 위 한 실험을 수행하였다. 스텝모터와 니들벨브로 장치구성을 하여 AALBORG사의 GFM 571S 모 델의 유량계를 이용하여 공급압력 80~200 psi 상태에서 산화제의 유량 측정 실험을 수행하였 다. Fig. 11은 산화제 유량 조절 실험을 위한 장치구성을 나타내며 스텝모터의 사양에 따른 회전각을 감안하여 산화제의 유량 측정 실험을 수행하였다. 실험은 노즐과 그레인을 장착하고 연소는 하지 않은 상태에서 유량실험을 수행하 였고, 그 결과를 Fig. 12로 정리하였다.
산화제 공급압력이 14 bar (약 200 psi)인 경 우에는 Fig. 12의 실험결과를 통해 스텝모터 한
Fig. 11 Oxidizer Flow Control System
Fig. 12 Results of Oxidizer Mass Flow Control Test[6]
스텝 당 약 0.145 g/sec의 유량을 조절할 수 있 었다. 그래프를 살펴보면 스텝모터의 회전수에 따른 산화제 질량유량이 대체로 선형적으로 증 가하지만 회전수가 많아질수록 점점 수렴하는 경향을 볼 수 있다. 이는 근본적으로 유량을 제 어하는 니들 밸브의 유량한계와 관계가 있는 것 으로 이로 인해 모터의 회전수가 증가할수록 산 화제의 질량 유량 증가량이 감소하는 경향을 보 이는 것으로 판단된다.
4. 추력제어 실험
4.1 냉가스 추력제어실험
실제 연소실험을 수행하기 전에 스텝모터를 통한 추력제어 성능을 확인하기 위해서 소형 냉 가스추력기를 이용한 냉가스() 추력제어 실험 을 수행하였다. 실험을 위해 사용한 냉가스 추력 기는 Table 2와 같이 설계 목표를 두고 설계하 였다. 추력 측정을 위하여 추력 측정 시스템을 장치하고 Calibration을 통해 추력 데이터의 신 뢰도를 확보하였다.
냉가스추력기를 이용한 추력제어 실험은 추력 0~5 N범위에서 진행하였다. 제어 프로그램에서 미리 입력된 추력명력에 맞게 추력이 변하도록 실험하였다. 오차 범위를 0.2 N으로 설정하고 실 험한 결과 오차범위 내에서 추력 명령에 따라 추력 곡선을 그렸다. 하지만 추력 명령에 대한 반응속도가 낮아 반응속도를 개선하기 위한 연 구가 필요하다고 판단된다. 냉가스추력기 실험 결과는 Fig. 13에서 볼 수 있다.
Fig. 14 Layout of Thrust Control Experiment
Fig. 15 Results of Thrust Measurement Fig. 13 Results of Thrust Control Test for Cold-Gas
Thruster
Fig. 16 Results of Thrust Measurement under Thrust command (20 N - 10 N - 20 N - 0 N)[7]
4.2 하이브리드 로켓 추력제어실험
연소실험은 방폭 시설이 갖춰진 장소에서 수 행되었다. 본 연구에서 추진제와 산화제를 이용 한 연소실험을 처음으로 수행하였기 때문에 안 전상에 문제를 고려하여 방폭벽 안에 실험장치 를 설치하고 산소탱크와 제어박스를 방폭벽 외 부에 설치하여 연소실험을 수행하였다. 실험 장 치 구성은 Fig. 14에서 보이는 것처럼 구성하였 다.
4.2.1 실험 결과
연소실험은 총 3회에 걸쳐 수행하였다. 첫 실 험은 4~5초 간격으로 스텝모터를 50 Step씩 증 가시켜 유량을 일정 간격으로 증가시켰을 때 추 력이 증가하는지를 확인하는 실험을 수행하였다.
나머지 두 번의 실험은 사전에 프로그램에 입력
된 추력 명령에 따라 유량을 변화시켜 추력을 제어하는 실험을 수행하였다. 첫 번째 실험의 결 과는 Fig. 15에서 볼 수 있다.
스텝모터를 50 Step씩 일정하게 회전시키면서 산화제 유량을 증가 시켰다. 스텝모터의 스텝 수 의 증가는 니들밸브의 개폐량 증가를 의미한다.
하지만 위에서 언급했듯이 스텝수의 증가는 유 량의 증가량과 정확히 비례하지는 않는다. 스텝 수가 증가할수록 오히려 산화제 유량증가량은 감소하지만 오히려 추력의 증가폭은 커지는 것 을 알 수 있다. 이것은 그레인의 연소과정에서 연소면적 증가로 인한 결과라고 판단된다.
Figure 16은 사전에 입력된 추력 명령에 따라 서 유량을 자동으로 조절하여 얻은 실험 결과이 다. 유량을 자동으로 조절하는 첫 실험이기 때문
에 프로그램의 오작동 문제를 고려하여 추력의 허용오차 범위를 5 N으로 설정하고 실험을 수행 하였다. 추력은 20 N - 10 N - 20 N - 0 N 으 로 설정하고 실험을 수행하였다. 실험 결과 그래 프에서 점선으로 표시된 추력 명령을 따라서 추 력의 허용오차 범위 5 N 범위에서 추력이 변하 는 것을 확인하였다. 오차 허용범위가 너무 커서 추력을 일정하게 유지하지는 못하였고 반응속도 가 느리기 때문에 이를 극복하기 위한 연구가 필요하다고 판단된다.
5. 결 론
본 논문에서 수행한 산화제 유량제어를 통한 하이브리드 로켓의 추력실험을 한 결과를 다음 과 같이 요약할 수 있다.
1. 기체산소(GO2)와 고체연료(Polyethylene)를 이 용한 추력 50 N급 Lab-Scale 하이브리드 로켓 을 설계․제작하였고, 산화제 유량 제어를 위 해 니들밸브에 스텝모터를 장착하여 구동할 수 있는 프로그램과 장치를 제작하였다 2. 산화제 유량 제어 실험에서 공급압력 200 psi
상태에서 모터의 한 스텝에 약 0.145 g/sec의 유량을 조절할 수 있는 산화제 유량제어 장치 의 기초실험을 수행하였다
3. 냉가스추력기 실험 및 산화제 유량제어를 통 한 추력 제어 실험을 수행하여 추력의 허용오 차 범위 5 N 범위에서 하이브리드 로켓의 산 화제 유량제어를 통한 추력제어 가능성을 확 인하였다
후 기
“이 논문은 2008년도 충남대학교 학술연구비 지 원에 의하여 연구되었음”
참 고 문 헌
1. 권민찬, 허환일, “하이브리드 로켓의 개념 소 개 및 연구개발 동향 분석 Ⅰ- 대형프로젝트 및 기업”, 한국항공우주학회지, 제30권 3호, 2002, pp.146-154
2. 권민찬, 허환일, “하이브리드 로켓의 개념 소 개 및 연구개발 동향 분석 Ⅱ- 대학 및 아마 추어,” 한국항공우주학회지, 제30권 3호, 2002, pp.155-163
3. 강동훈, 이창진, “하이브리드 로켓에서의 Negative DC-shift 발생 특성,” 한국추진공학 회 추계학술발표회 논문집, 2009, pp.522-525 4. 안성용, 진정근, 정은상, 권세진, “과산화수소
촉매 분해를 이용한 하이브리드 로켓 자연 점화”, 한국추진공학회 추계학술대회 논문집, 2009, pp.499-506
5. 조민경, 허준영, 박형주, 김진곤, 문희장, 성 홍계, “국부연소 현상을 고려한 하이브리드 로켓의 성능예측 기법연구”, 한국추진공학회 추계학술대회 논문집, 2009, pp.517-521 6. 오화영, 문성환, 허환일, “HTPB/GO2 하이브
리드 로켓의 산화제 유량제어," 한국추진공 학회 추계학술대회 논문집, 2004, pp.251-254 7. 이용우, 이민재, 이종률, 정성철, 김혜환, 허
환일, “하이브리드 로켓의 추력 제어 방법에 대한 예비 실험 결과”, 한국추진공학회 추계 학술대회 논문집, 2007, pp.237-240
8. W. R. Humble, N. G Henry and J. W.
Larson, "Space Propulsion Analysis and Design", Space Technology Series, McGraw Hill, Inc., 1995, pp.107-120, 179-441, 611, 711-712
9. George P. Sutton, Oscar Biblarz, "Rocket Propulsion Elements" Awiley-Interscience Publication, JOHN WILEY & SONS, INC.
7th ed, 2001, pp.579-607