http://dx.doi.org/10.7839/ksfc.2019.16.3.033
고장 진단 및 예지가 가능한 로봇용 감속기 내구성능평가 장치 개발
Development of a Lifetime Test Bench for Robot Reducers for Fault Diagnosis and Failure Prognostics
신주성
1*․김주현
1․김종걸
1․김무림
1Ju Seong Shin, Ju Hyun Kim, Jong Geol Kim and Maolin Jin
Received: 27 May 2019, Revised: 21 Jul. 2019, Accepted: 05 Aug. 2019
Key Words:Lifetime Test Bench(내구성능평가 장치), Failure Prognostics(고장 예지), Failure Diagnosis(고장 진단 ), Precision Reducer of Robot(로봇용 정밀 감속기), Noise(소음), Vibration(진동), Temperature (온도)
Abstract: This study presents the development of a lifetime test bench for the strain wave reducer which is a precision gear reducer of the robot to realize fault diagnosis and failure prognostics. To this end, the lifetime test bench was designed to detect the vertical forward/reverse direction rotation load. Through the lifetime test bench, it is possible to apply the same load spectrum from robot working scenarios. We developed a data integration gateway for fault data collection. Through the development of dedicated software for fault diagnosis and failure prognostics, these data from vibration, noise and temperature sensors were collected and analyzed along with the operation of the lifetime evaluation.
* Corresponding author: [email protected]
1 Human-Centered Mechatronics Research Center, Disaster Robotics R&D Center, Korea Institute of Robot and Convergence(KIRO), Pohang 37666, Korea
Copyright Ⓒ 2019, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호 설명
: sensor value
: scale factor constant
: offset constant
: input voltage, V
: the value of output vibration, rms
: the input sample voltage of vibration, V
: the number of input samples
1. 서 론
4차 산업혁명(Industry 4.0)과 사물인터넷(IoT)의 개 념이 산업용 제조로봇에 도입되면서 인간과 협업이 가능한 HRC(Human Robot Collaboration) 로봇 시스템 시장이 Fig. 1과 같이 급격히 확대되고 있다.
1-2)Fig. 1 Market size of HRC robot
Fig. 2 Trend of the industry robot system
고장 진단 및 예지가 가능한 로봇용 감속기 내구성능평가 장치 개발
HRC 로봇은 실제 산업현장에서 아주 빠른 속도로 확산되어가고 있으며(Fig. 2), 현재 산업용 로봇을 생 산하는 다양한 글로벌 기업들이 HRC 로봇사업도 병 행하고 있다.
2)HRC 로봇에 주로 사용되고 있는 Fig. 3의 스트레 인 웨이브 감속기(Strain wave reducer)는 모터의 발생 토크를 증대하거나 최종 운동 성능을 결정하는 로봇 의 핵심 부품 중 하나이다.
2-4)Fig. 3 Strain wave reducer
현재 로봇용 정밀 감속기 시장은 일본의 하모닉드 라이브사가 독점하고 있다. 국내 로봇 산업 발전을 위해서는 로봇용 감속기의 수입 의존도 탈피를 위한 국산화가 시급한 상황이이며, 이를 위해 국내 여러 기관에서 국산화 개발이 진행 중에 있다. 로봇용 감 속기의 완전한 국산화를 위해 제품 개발과 함께 품질 안정화와 신뢰성 확보가 필요하며, 스마트 공장에 적 용을 위해 로봇에 대한 고장 예지 및 진단 기술이 필 요하다. 따라서 새로운 로봇용 감속기 성능평가 장치 의 개발이 필요하다.
2-4)본 연구에서는 로봇용 스트레인 웨이브 감속기의 내구성능 즉, 수명을 측정 및 평가하고 추가적으로 고장 예지 및 진단 기능을 구현하기 위한 내구성능 평가 장치를 개발하였다. 정확한 성능평가를 위해 수 직 방향의 정/역회전 부하를 구현할 수 있는 구조로 설계하였고, 전용 소프트웨어 개발을 통해 내구성능 평가 장치의 작동과 더불어 센서 데이터를 취득하고 이 데이터를 기반으로 고장 진단 및 예지가 가능한 시스템 개발의 기반을 마련하였다.
2. 하드웨어 개발
스트레인 웨이브 감속기 내구성능 평가 장치는 기 계 부분과 전기 부분으로 구성되어 있다. 기계적인 부분의 특징은 다량의 국산화 개발품에 대한 샘플링
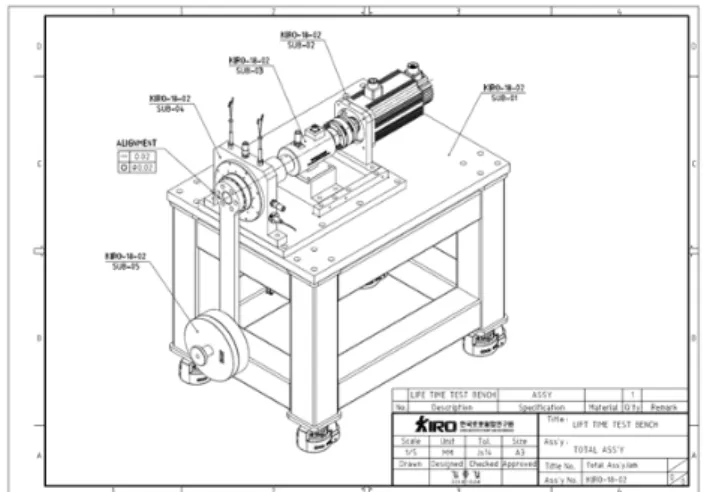
Fig. 4 Assembly draft of lifetime test bench
Fig. 5 Reducer housing
검사가 가능하도록 소형화하였으며, 다수의 내구성능 평가 장치를 현장에 배치할 수 있도록 Fig. 4와 같이 생산현장에 최적화 된 모델로 개발하였다.
또한, 다양한 크기 및 형상을 가진 감속기 모델에 대응하도록 Fig. 5의 감속기 고정부 하우징의 지그 변 경이 가능하도록 설계하였다.
감속기 출력단의 외부 하중에 변화를 적용하기 위 하여 1kg, 5kg, 10kg 등의 추를 변화시켜 장착할 수 있는 링크를 적용하여 외란 변화에 대한 감속기의 성 능을 측정할 수 있도록 개발하였다.
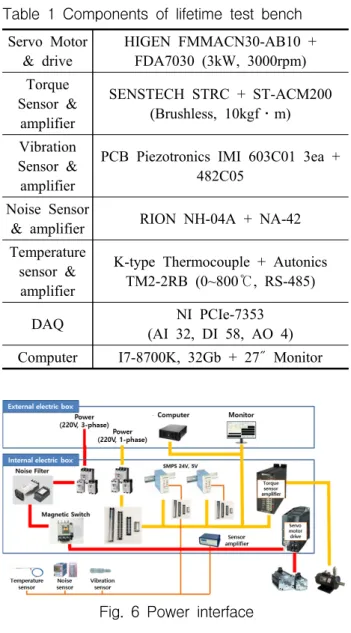
전기적인 부분의 특징은 서보모터, 드라이버 및 토 크센서 이외에 진동센서, 소음센서, 온도센서를 장착 하여 고장 예지 및 진단 기능 구현에 활용하기 위한 데이터를 취득할 수 있도록 구성하였다. 사용된 구성 품들은 Table 1과 같다.
전원 인터페이스는 Fig. 6과 같이 3상 220V 전원을
사용하며, 전원의 노이즈 감소를 위해 노이즈 필터를
적용하였다. 서보 모터 및 드라이버에 3상 전원이 인
가되며 그 외 센서 전원 공급용 SMPS(Switching
Mode Power Supply), 센서 앰프 및 컴퓨터 등의 전원
은 단상 220V 전원으로 구성하였다.
Table 1 Components of lifetime test bench Servo Motor
& drive
HIGEN FMMACN30-AB10 + FDA7030 (3kW, 3000rpm) Torque
Sensor &
amplifier
SENSTECH STRC + ST-ACM200 (Brushless, 10kgf․m) Vibration
Sensor &
amplifier
PCB Piezotronics IMI 603C01 3ea + 482C05
Noise Sensor
& amplifier RION NH-04A + NA-42 Temperature
sensor &
amplifier
K-type Thermocouple + Autonics TM2-2RB (0~800℃, RS-485) DAQ NI PCIe-7353
(AI 32, DI 58, AO 4) Computer I7-8700K, 32Gb + 27˝ Monitor
Fig. 6 Power interface
제어 인터페이스는 Fig. 7과 같이 산업용 컴퓨터의 PCI Express 1x 슬롯에 다기능 I/O 보드를 장착하고, 전용 케이블로 연결된 터미널 블록에 서보 드라이버 제어를 위한 I/O 케이블 및 센서 앰프의 출력 신호선 을 연결하였다.
Fig. 7 Control interface
앰프를 거친 센서의 출력 신호는 전압 단위 의 아 날로그 값으로 출력되며, 이를 제조사의 data sheet 상 의 전압 단위당 출력 값으로 환산계수(scale factor,
) 및 편차 값(offset,
)을 식(1)과 같이 소프트웨 어에 적용하여 변환하였다.
×
(1)
여기서,
는 센서의 단위로 출력되는 값이며,
는 앰프에서 출력되는 전압 값이다.
3. 소프트웨어 개발
3.1 내구성능 평가 장치 전용 소프트웨어
내구성능 평가 장치의 전용 소프트웨어는 C# 언 어 및 Winform 기반으로 개발되었으며, 별도의 장 치 라이브러리에서 시험기 구동 및 센서 데이터 취 득에 필요한 아날로그 및 디지털 입출력 관련 함수 를 활용한다. 내구성능 평가를 위해서는 사용자에게 모델, 외부 하중, 시험모드 및 시험 시간 등을 입력 받아 시험기를 동작한다. 그 흐름도(flow chart)는 Fig. 8과 같다.
Fig. 8 Flow chart of analysis
3.2 HMI(Human Machine Interface)
소프트웨어 사용이 처음인 사용자도 단시간에 사 용할 수 있도록 단계별 진행 형식으로 구성하여 HMI 를 개발하였다.
프로그램 실행 시 Fig. 9의 첫 화면이 나타난다. 화
면 상단부에는 각 단계를 임의로 전환할 수 있는 Tap
이 구성되어 있으며, 하단부에는 순차적으로 단계를
넘어갈 수 있는 버튼이 위치해 있다.
고장 진단 및 예지가 가능한 로봇용 감속기 내구성능평가 장치 개발
Fig. 9 Home screen
첫 번째 단계는 내구성능 평가용 감속기의 정보를 입력하는 Fig. 10의 화면이다. 장치에 조립된 감속기 의 기종, 형번, 감속비, 형식, 특주 사양 및 별도의 메 모를 작성할 수 있으며 여기서 입력된 정보는 분석 및 보고서 화면에 출력된다.
Fig. 10 Information input screen of Reducer
Fig. 11 Information input screen of load
두 번째 단계는 감속기 출력부에 결합되어 있는 외 부 하중에 대한 정보를 입력하는 Fig. 11의 화면이다.
사용한 부하추의 무게(중량)별 개수와 부하 링크의 길이를 통해 출력부의 정적 부하 토크를 계산한다.
Fig. 12 Test screen of servo drive
Fig. 13 Test screen of sensor
Fig. 12 및 Fig. 13은 내구성능 평가 장치의 서보 모터 및 드라이버와 센서의 작동 상태를 테스트할 수 있는 화면으로 평가 시에는 활용되지 않으며, 문제 발생 시 Trouble shooting이 가능하게 하였다.
세 번째 단계는 평가 모드를 선택하는 Fig. 14 화면 이다. 프로그램 내부에 시험 모드를 정의하고 이를 사용자가 선택하여 선택된 모드의 프로토콜로 감속기 의 내구성능 평가가 이루어진다.
Fig. 14 Mode selection screen
네 번째 단계는 분석을 진행하는 Fig. 15 화면이다.
사전에 설정한 정보들을 저장 및 표기하며 센서 출력
버튼을 통해 분석 전 센서 데이터의 화면 출력 유무
를 선택할 수 있다. 시작 버튼을 누르면 설정된 모드 및 시간만큼 장치가 운용된 후 자동 정지한다. 시험 도중 정지 버튼을 눌러 임의로 정지할 수 있다.
Fig. 15 Analysis screen
x, y, z축의 진동 센서의 경우 식(2)의 제곱평균제곱 근(Root Mean Square, RMS)을 적용하여 변화하는 값 의 크기에 대한 통계적 척도로 진동을 검출한다.
⋯
(2)
다섯 번째 단계는 분석된 결과를 출력하는 Fig. 16 의 화면이다. 분석 화면의 결과를 그대로 출력하며 PDF 파일로 저장할 수 있다.
Fig. 16 Report screen
3.2 가속 내구 시험
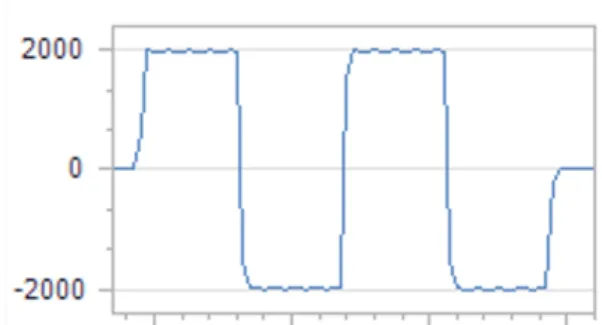
내구성능 평가 장치 소프트웨어의 또 다른 특징으 로 Fig. 17의 일반 내구 시험 프로토콜 외에 Fig. 18과 같은 가속 내구 시험을 위한 프로토콜을 정의할 수 있다. 가속 내구 시험은 감속기 수명 보증을 위해 수 행하는 일반 내구 시험의 시간 감소를 가져와 생산성 향상 및 신뢰성을 확보할 수 있다. 실제 보증 시간을 검증하기 위해서 시험 시간이 보증 시간보다 오래 걸 리는 장기적 시간이 소요되며, 무고장 시험시간 산출 결과는 가속 수명 시험의 필요성을 역설한다.
5-8)이에
Fig. 17 Example of general lifetime test protocol
Fig. 18 Example of accelerated lifetime test protocol
따라 별도의 가속 내구 시험 모드를 정의하고 가감속 이 반복된 패턴으로 가속 내구 시험 프로토콜을 소프 트웨어에 구성할 수 있게 개발하였다.
4. 센서 기반 고장 예지 및 진단 기술 개발
4.1 고장 예지 및 진단의 잔여 유효 수명
7)고장 예지 및 진단 기술에 있어서 잔여 유효 수명 (Remaining Useful Life, RUL)은 수리 또는 교체되기 전에 작동할 수 있는 시간을 의미한다. RUL을 고려 함으로써, 엔지니어는 유지 보수 일정을 수립하고 운 영 효율을 최적화하며 의도치 않은 작업의 중단을 피 할 수 있다. 이러한 이유로 RUL을 예측하는 것이 고 장 예지 및 진단 프로그램에서 최우선 시 되는 과제 이다.
RUL 추정 모델은 RUL을 예측할 뿐만 아니라 예측 에 대한 신뢰도 또한 제공한다. 모델 입력은 조건 지 표를 의미한다. 시스템 데이터가 서로 다른 형태로 저하되거나 작동 할 때 예측 가능한 방식으로 동작이 변경되는 센서 데이터 또는 로그 데이터에서 추출된 함수이다. RUL을 계산하는데 사용되는 방법은 사용 할 수 있는 데이터의 종류에 따라 다르다.
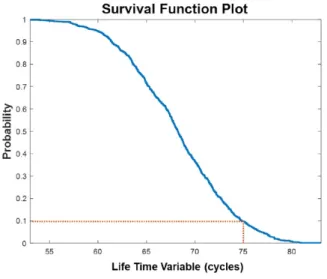
수명 데이터는 비례 위험 모델(proportional hazard
models) 및 부품 고장 시간의 확률 분포를 통해 RUL
을 추정하는데 사용된다. 간단한 예는 과거 방전 시
고장 진단 및 예지가 가능한 로봇용 감속기 내구성능평가 장치 개발
간과 공변량(covariate), 배터리가 작동한 환경 및 배터 리에 가해진 부하와 같은 변수를 기반으로 배터리의 방전 시간을 추정한다. Fig. 19의 생존 함수 그래프는 작동 시간에 따라 배터리가 고장 날 확률을 보여준 다. 배터리가 75사이클 동안 작동 중이면 수명이 다 할 확률은 90%가 된다.
Fig. 19 Survival function plot
작동에서 고장까지를 기록한 데이터는 유사성 방 법(similarity methods)를 사용하여 RUL을 추정할 수 있다. 성능이 저하되는 프로파일을 수집하여 시스템 에서 들어오는 새 데이터와 비교하고, 데이터가 가장 밀접하게 일치하는 프로파일을 판별한다. Fig.20에서 엔진의 과거 작동에서 고장까지 데이터 집합의 성능 저하 프로파일은 파란색으로 표시되고, 엔진의 현재 데이터는 빨간색으로 표시된다. 엔진이 가장 밀접하 게 일치하는 프로파일을 기반으로 RUL은 약 65사이 클로 추정할 수 있다.
Fig. 20 Engine degradation profiles
대부분의 경우에는 작동에서 고장까지를 기록한 데이터 또는 수명 데이터는 기록되지 않았지만 사전 에 설정된 임계값에 대한 정보를 활용한다. 예를 들 어, 펌프의 액체 온도는 71℃를 초과 할 수 없으며 압 력은 155bar 이하여야 한다는 정보를 사용하면 시간 이 지남에 따라 상승하거나 하강하는 온도 및 압력과 같은 센서 데이터에서 추출된 상태를 시간 연속 모델 에 맞춰 볼 수 있다. 이러한 성능 저하 모델은 조건 지표가 임계값을 초과 할 때를 예측하여 RUL을 평가 한다. 주성분 분석(principal component analysis)과 같 은 기술을 사용하여 둘 이상의 조건 지표 정보를 통 합하는 융합 조건 지표와 함께 사용할 수도 있다.
Fig. 21은 풍력 터빈에 사용되는 고속 베어링의 고장 을 추적하는 지수 저하 모델(exponential degradation models)을 보여준다. 조건 지표는 파란색으로 표시된 다. 성능 저하 모델은 베어링이 약 9.5일 내에 임계값 을 초과할 것으로 예측한다. 빨간색 음영 영역은 예 측에 대한 신뢰 범위를 나타낸다.
Fig. 21 Degradation model for highspeed bearing
RUL에 대한 신뢰할 수 있는 추정 값을 가지고 있 다면, 고장 예지 및 진단 시스템에 이를 통합하거나 모니터링 할 수 있다. 그러면 유지 보수 팀은 작업에 영향을 받지 않고 가능한 빨리 장비 상태의 변화에 대해 대응할 수 있다. 이와 같은 고장 예지 및 진단 기술들을 내구성능 평가 장치에 적용 한다.
4.2 장비의 예지 보전
기계장비의 유지보수는 크게 사후보전, 예방보전,
예지보전 3가지로 분류하며 본 논문에서 다루고자 하
는 고장 예지 및 진단 기술은 장비의 유휴 시간과 운
영비용을 줄이기 위해서 고장 전에 불량을 감지하여
교체하는 예지보전에 속한다.
Fig. 22 Method of Maintain the Machine
Fig. 23 Machine Health Degradation Curve
기계장비의 고장 예지 및 진단은 Fig. 23의 장비의 불량 상태 감쇠 곡선을 기반으로 현장 조건 및 예지 보전 시간 주기에 맞게 진동, 온도, 소음 상태를 측정 하며 이 중 기계장비 상태의 가장 빠른 지시계인 진 동 정보를 취득하기 위한 진동(가속도)센서가 주로 사용되어진다.
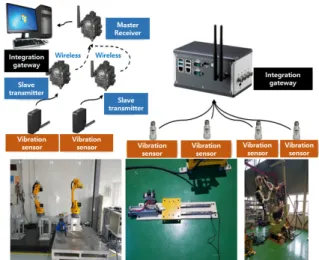
4.3 고장 데이터 통합 수집 게이트웨이
장비의 고장 예지 및 진단 정보를 수집하기 위한 하드웨어는 선정한 센서의 통신사양, 장비 배선의 혼 잡도, 장비의 개수 등 다양한 현장 요건에 따라 Fig.
24와 같이 무선 또는 유선으로 시스템을 구축하며 Fig. 25와 같이 장비의 기본 정보(로봇의 경우 관절 각도 및 전류 데이터 등)와 통합하여 단일 또는 다수 장비에 대한 고장 예지 및 진단 데이터를 수집하기 위한 통합 수집 게이트웨이를 개발하였다.
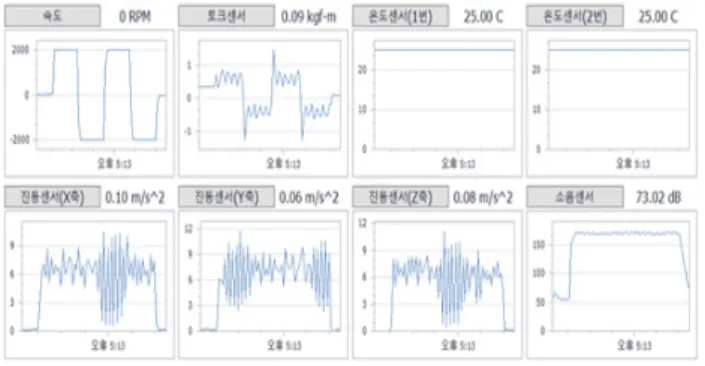
통합 수집 게이트웨이는 RS485, Modbus 등 시리얼 통신에 의해 수집한 1~10Khz 주기의 센서 기반 고장 진단 Raw 데이터를 서버의 부하를 최소화하기 위해 Fig. 26과 같이 장비 정보에 의해 파악할 수 있는 동 작 패턴과 결합하여 정제된 RMS 기반 고장 예지 Filtered 데이터를 수집하고 관제 서버에 전송하며 Fig. 27과 같이 모니터링 할 수 있다.
Fig. 24 Hardware configuration for Failure prediction
Fig. 25 Integrated data collection gateway for Failure prediction
Fig. 26 Data filtering for fault prediction
Fig. 27 Data integration collection gateway
monitoring system
고장 진단 및 예지가 가능한 로봇용 감속기 내구성능평가 장치 개발