한국정보통신학회논문지 Vol. 25, No. 7: 910~916, Jul. 2021
AWGN 환경에서 로컬 스티어링 커널과 블록매칭에 기반한 디지 털 필터 알고리즘
천봉원1·김남호2*
Digital Filter Algorithm based on Local Steering Kernel and Block Matching in AWGN Environment
Bong-Won Cheon 1 · Nam-Ho Kim 2*
1 Ph. D. student, Dept. of Smart Robot Convergence and Application Eng., Pukyong National University, Busan, 48513 Korea
2* Professor, Dept. of Control and Instrumentation Eng., Pukyong National University, Busan, 48513 Korea
요 약
현대 사회는 4차 산업혁명의 영향에 의해 다양한 디지털 통신 장비가 사용되고 있다. 이에 따라 데이터 전송 과정에 서 발생하는 잡음제거에 관심이 높아지고 있으며, 효율적으로 영상을 복원하기 위한 연구가 진행되고 있다. 본 논문에 서는 디지털 이미지 전송 과정에서 발생하는 AWGN을 제거하기 위한 필터링 알고리즘을 제안한다. 제안한 알고리즘 은 영상에서 강하게 나타나는 AWGN을 제거하기 위해 블록매칭에 따라 입력화소의 주변에서 비슷한 패턴을 가진 영 역을 선별하여 유사성이 높은 화소를 분류한다. 선별된 화소는 로컬 스티어링 커널로 구한 가중치를 적용하여 추정값 을 정하며, 센터마스크의 표준편차에 따라 입력화소값을 가감하여 최종출력을 구한다. 제안한 알고리즘을 평가하기 위해 기존 AWGN 제거 알고리즘들과 시뮬레이션하였으며, 확대영상과 PSNR을 사용하여 비교 분석하였다.
ABSTRACT
In modern society, various digital communication equipment is being used due to the influence of the 4th industrial revolution. Accordingly, interest in removing noise generated in a data transmission process is increasing, and research is being conducted to efficiently reconstruct an image. In this paper, we propose a filtering algorithm to remove the AWGN generated in the digital image transmission process. The proposed algorithm classifies pixels with high similarity by selecting regions with similar patterns around the input pixels according to block matching to remove the AWGN that appears strongly in the image. The selected pixel determines the estimated value by applying the weight obtained by the local steering kernel, and obtains the final output by adding or subtracting the input pixel value according to the standard deviation of the center mask. In order to evaluate the proposed algorithm, it was simulated with existing AWGN removal algorithms, and comparative analysis was performed using enlarged images and PSNR.
키워드
: 로컬 스티어링 커널, 블록매칭, 영상처리, AWGN
Keywords
: Local steering kernel, Block matching, Image processing, AWGN
Received 29 January 2021, Revised 13 March 2021, Accepted 9 June 2021
* Corresponding Author Nam-Ho Kim(E-mail:[email protected], Tel:+82-51-629-6328)
Professor, Dept. of Control and Instrumentation Eng., Pukyong National University, Busan, 48513 Korea
Open Access http://doi.org/10.6109/jkiice.2021.25.7.910
print ISSN: 2234-4772 online ISSN: 2288-4165This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/li-censes/ by-nc/3.0/)
Ⅰ. 서 론
현대 사회는 IoT 기술의 발전으로 다양한 디지털 통 신매체가 사용되고 있다. 하지만 데이터 통신 과정에서 다양한 원인으로 인해 잡음이 발생하여 시스템의 성능 에 영향을 미치고 있다. 영상의 잡음제거는 영상을 기반 으로 물체를 감지하거나 인식, 추적 등의 알고리즘을 사 용하는 시스템에서 전처리 단계로 사용하는 중요한 과 정으로, 영상의 품질 개선과 보다 우수한 영상 인식을 위해 잡음제거에 관한 다양한 필터링 기술들이 연구되 고 있다.
AWGN(additive white gaussian noise)은 데이터 통신 과정에서 발생하는 대표적인 잡음 중 하나이다. AWGN 은 통신 시스템에서 열잡음이 시스템을 훼손시키는 특 성에 따라 이름이 붙여진 잡음으로 대부분의 통신 시스 템과 모든 주파수 대역에서 발생한다[1]. 영상의 잡음을 제거하기 위하여 다양한 연구가 제시되었으나, 에지 성 분이 강하게 나타나는 고주파 영역의 경우 잡음이 혼재 되어 있기 때문에 노이즈 제거와 에지 성분에 대한 정보 를 보존하기 어렵다.
본 논문은 로컬 스티어링 커널과 블록매칭을 사용하 여 AWGN을 효과적으로 제거하는 알고리즘을 제안한 다. 제안한 알고리즘은 블록매칭에 따라 입력 화소값의 주변에서 비슷한 패턴을 가진 영역을 선별하며, 중심화 소를 기준으로 로컬 스티어링 커널을 사용하여 구한 가 중치를 선별된 영역에 적용하여 최종출력을 계산한다.
Ⅱ. 로컬 스티어링 커널
스티어링 커널 회귀(SKR : steering kernel regression) 는 위치와 강도뿐만 아니라 샘플의 고유한 로컬 구조에 따라 달라진다. 따라서 커널의 크기와 모양은 확산 및 특징 추출 특성에 큰 영향을 미친다. SKR 방법의 핵심 은 강한 노이즈에서도 로컬 구조를 추정하는 로컬 스티 어링 커널(LSK : local steering kernel)기능이다[2].
로컬 스티어링 커널을 구하기 위해 로컬 커널의 공분 산행렬을 구한다. 공분산행렬은 로컬 커널의 국부적 기 울기를 기반으로 결정되는 2×2 크기의 행렬이며, 로컬 커널 전체의 픽셀 증가에 따라 형태가 결정된다.
공분산행렬 는 다음과 같다.
(1)
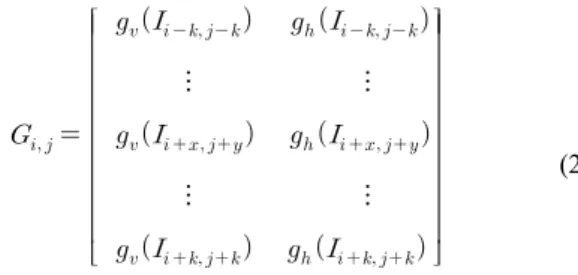
여기서 는 로컬 커널 내부에 존재하는 픽셀에 대 한 화소값의 기울기를 나타내는 행렬이며 다음과 같이 나타낼 수 있다[3].
⋮ ⋮
⋮ ⋮
(2)
여기서 는 입력영상을 의미하며, 는 영상의 픽 셀좌표를 의미한다. 는 로컬 커널 내부의 좌표를 의 미하며 로컬 커널의 크기를 나타내는 상수 에 따라
≤ ≤ 의 범위를 가진다. ∙와 ∙는 각각 수직 및 수평 방향의 기울기를 나타내며, 1차 편미 분 방정식으로 구한다.
가우시안 함수에 로컬 스티어링 행렬을 투영한 가중
치 를 구하면 다음과 같이 주어진다.
det
(3)
여기서 det
는 공분산행렬 의 행렬식을 의 미하며, 는 로컬 커널의 좌표값 로 이루어진
× 크기의 행렬을 의미한다. 는 글로벌 스무딩 상수 를 의미하며, 로컬 스티어링 가중치는 제안한 알고리즘 에서 블록매칭으로 분류된 화소의 가중치로 사용된다.
그림 1은 영상의 에지성분에 대해 로컬 스티어링 커 널을 적용한 것을 나타낸 것이다. 그림 1에서 (a)는 영상 의 에지영역의 화소값을 확대한 것이며, (b)는 에지영역
(a) (b) (c)
Fig. 1 Local steering kernel (a) Enlarged image of edge
area (b) Gaussian weight (c) Steering weight에 대해 나타낸 가우시안 가중치를 시각화한 것이다. (c) 는 가우시안 가중치에 스티어링 커널을 적용한 가중치 를 나타낸 것으로 (a)의 에지영역을 따라 가중치가 기울 어져서 설정된 것을 확인할 수 있다.
Ⅲ. 제안한 알고리즘
3.1. 마스크 설정
제안한 알고리즘은 화소패턴의 정보를 분석하기 위 해 센터마스크와 매칭마스크를 설정하며, 두 마스크의 화소패턴을 분석하기 위해 블록매칭[4]을 사용한다. 여 기서 센터마스크(center mask)는 화소 분포 비교의 기준 이 되는 마스크로, 입력 영상 의 내부 좌표인 에 위치한 화소값을 중심으로 설정한다.
센터마스크 는 다음 수식과 같다.
≤ ≤
(4)
여기서 는 마스크 내부 좌표를 의미하며, 마스크 크기 에 따라 ≤ ≤ 의 범위를 가진다. 만약
인 경우 센터마스크는 3×3크기를 가지며, 마스크 내부 좌표는 ≤ ≤ 의 범위를 가진다.
매칭마스크(matching mask)는 화소패턴이 유사한 화 소를 판별하기 위해 입력 화소 주변에 설정되며, 센터마 스크와 동일한 크기로 설정한다. 매칭마스크
는 다음 수식과 같다.
≤ ≤
(5)
매칭마스크는 입력 화소 를 중심으로 설정된 로컬 커널 내부에 존재하며, 센터마스크와 동일한 크기를 가 진다. 매칭마스크는 로컬 커널의 크기를 나타내는 의 값이 클수록 더 멀리 떨어진 화소까지 설정되어 블록매 칭을 실행한다. 이때, 로컬 커널이 영상을 벗어나는 영 역에 설정되는 경우, 매칭마스크를 설정하지 않는다.
3.2. 블록매칭
블록매칭은 센터마스크와 매칭마스크의 유사성을 판 단하기 위해 실행한다. 블록매칭으로 구한 두 마스크의
유사도 는 다음 수식과 같다.
(6)
(7)
유사도는 두 마스크의 화소패턴이 유사할수록 높은 값을 나타낸다. 만약 두 마스크의 화소값이 동일한 경우 최댓값을 가지며, 차이가 클수록 낮은값을 나타낸다.
3.3. 임계값 계산
두 마스크의 유사도에 따라 출력계산에 사용되는 화 소값을 선별하기 위해 임계값을 정한다. 임계값은 영상 전체의 잡음 세기를 판단하는 잡음 추정치를 바탕으로 구한다. 임계값은 잡음이 강하게 나타나는 것으로 추정 되는 영상에서는 낮아지며, 블록매칭에 사용되는 매칭 마스크의 수를 늘리는 역할을 한다.
임계값 는 다음과 같다.
(8)
여기서 는 잡음추정치를 의미하며, 필터링과정이 입력화소의 좌표까지 진행되었을 때, 앞서 진행된 필터링 과정에서 계산된 센터마스크의 표준편차 값 의 평균으로 구한다.
센터마스크의 표준편차 는 다음과 같다.
(9)
여기서 는 의 평균을 의미한다.
3.4. 블록매칭의 출력 계산
유사도 가 임계값 보다 작은 경우 두 마스
크의 화소패턴이 서로 유사하다고 판단한다. 이때, 유사 하다고 판단된 화소를 분류하기 위해 판별마스크
를 다음과 같이 설정한다.
(10)
판별마스크와 로컬 스티어링 가중치를 적용하여 블 록매칭의 출력 는 다음과 같다.
(11)
3.5. 필터 출력 계산
필터 출력은 가중치에 의해 추정치와 입력화소를 합 산하여 구한다. 가중치는 센터마스크의 표준편차 와 잡음 추정치 를 비교하여 구하며, 센터마스크의 표 준편차가 잡음 추정치보다 큰 경우, 영상의 에지성분과 같은 고주파영역으로 간주하여 블록매칭의 출력값에 입력영상의 화소값을 가산한다.
가중치 와 필터의 최종 출력 는 다음과 같다.
(12)
(13)
Ⅳ. 시뮬레이션 및 결과
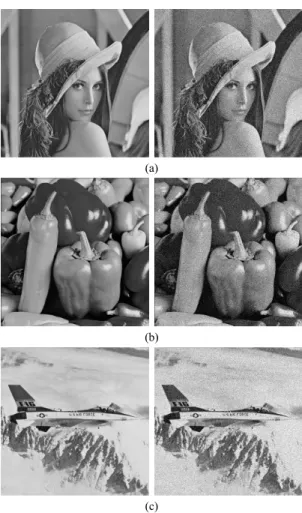
제안한 알고리즘의 시뮬레이션을 위해 512×512 사 이즈의 8bit 그레이 영상인 Lena 영상과 Peppers 영상, Airplane 영상을 사용하였으며, 표준편차에 따라 =
5~30인 AWGN을 첨가하여 잡음영상을 획득하였다. 잡 음영상을 기존 방법 및 제안한 알고리즘으로 시뮬레이 션한 결과를 확대영상 및 PSNR(peak signal- to-noise ratio)으로 비교 분석하였다. 시뮬레이션에 사용된 모든 필터는 3×3 크기의 마스크로 처리하였다. 제안한 알고 리즘은 글로벌 스무딩 상수의 값을 다양하게 설정하여 분석하였으며, 가장 효과적인 성능을 보인 의 조
건으로 시뮬레이션을 진행하였다.
그림 2는 시뮬레이션에 이용된 Lena 영상과 Peppers 영상, Airplane 영상의 원본 영상과 인 AWGN에 훼손된 잡음영상이다.
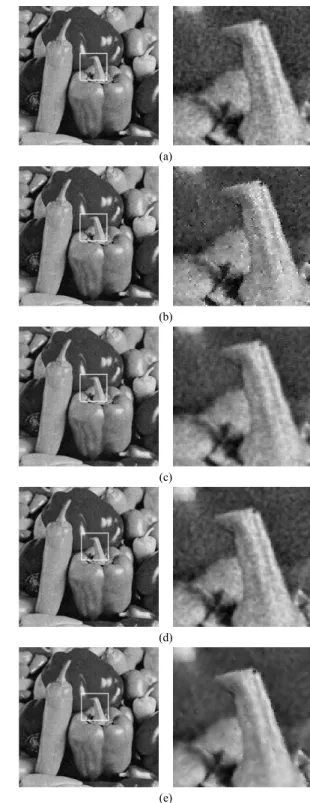
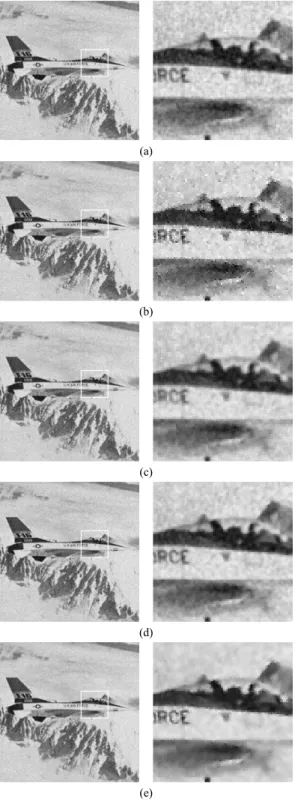
그림 3, 4, 5는 시뮬레이션에서 사용된 잡음영상을 SWF(spatial weight filter)[5], EDWF(edge detection wiener filter)[6], FLBF(fuzzy logic based filter)[7], LSKF(local steering kernel filter)[3], 그리고 제안한 필 터 알고리즘(PFA : proposed filter algorithm)으로 처리 한 결과 및 확대영상을 나타낸 것이다.
(a)
(b)
(c)
Fig. 2 Original image and noisy image ( )
(a) Lena image (b) Peppers image (c) Airplane image(a)
(b)
(c)
(d)
(e)
Fig. 3 Simulation result (Lena image,
) (a) SWF (b) EDWF (c) FLBF (d) LSKF (e) PFA(a)
(b)
(c)
(d)
(e)
Fig. 4 Simulation result (Peppers image,
) (a) SWF (b) EDWF (c) FLBF (d) LSKF (e) PFA(a)
(b)
(c)
(d)
(e)
Fig. 5 Simulation result (Airplane image,
) (a) SWF (b) EDWF (c) FLBF (d) LSKF (e) PFA제안한 알고리즘으로 처리한 결과 기존 영상에 비해 선명한 결과를 얻을 수 있었으며, 특히 에지성분이 강하 게 나타나는 영역에서 우수한 성능을 보였다.
표 1과 2, 3은 AWGN의 표준편차에 따른 잡음영상의 시뮬레이션 결과에 대한 PSNR을 나타낸 것이다.
AWGN []
Lena image PSNR [dB]
SWF EDWF FLBF LSKF PFA
5 35.52 34.81 33.38 34.51 36.80
10 33.10 33.11 32.28 33.19 33.92
15 30.74 30.97 30.80 31.50 32.29
20 28.75 28.40 29.36 29.82 31.05
25 27.10 25.66 28.05 28.25 29.83
30 25.71 23.17 26.87 26.80 27.73
Table. 1 PSNR comparison of Lena image
AWGN []
Peppers image PSNR [dB]
SWF EDWF FLBF LSKF PFA
5 34.41 34.83 32.93 33.92 35.76
10 32.44 33.09 31.79 32.74 33.82
15 30.36 30.97 30.34 31.17 32.35
20 28.57 28.55 28.91 29.65 31.08
25 26.98 25.87 27.55 28.10 29.69
30 25.59 23.38 26.30 26.65 27.59
Table. 2 PSNR comparison of Peppers image
AWGN []
Airplane image PSNR [dB]
SWF EDWF FLBF LSKF PFA
5 35.74 35.69 33.30 34.56 37.67
10 33.22 33.47 32.15 33.20 34.06
15 30.88 31.05 30.75 31.55 32.26
20 28.84 28.38 29.30 29.84 30.88
25 27.25 25.75 28.07 28.34 29.70
30 25.90 23.39 26.94 26.93 27.78
Table. 3 PSNR comparison of Airplane image
PSNR은 일반적으로 30dB 이상인 경우 원본영상에
가깝다고 평가하며[8], 제안한 알고리즘은 이하
인 AWGN에 훼손된 영상에서 30dB 이상의 PSNR을 보
이며 우수한 잡음제거 성능을 보였다. 이상인 잡
음영상을 처리한 결과, 제안한 알고리즘은 기존 방법에 비해 높은 PSNR을 나타내었다.
Ⅴ. 결 론
본 논문은 AWGN 환경에서 로컬 스티어링 커널과 블록매칭을 사용하여 잡음을 제거하는 알고리즘을 제 안한다. 제안한 알고리즘은 블록매칭을 사용하여 입력 화소와 유사성이 높은 화소를 분류하며, 로컬 스티어링 커널에 의해 설정된 가중치에 따라 추정값을 계산하여 최종출력을 구한다.
시뮬레이션 결과 제안한 알고리즘은 우수한 성능을 보였으며, 확대영상과 PSNR 비교 등을 통해 기존 방법 에 비해 잡음제거성능이 개선되었음을 확인하였다. 제 안한 알고리즘은 인 AWGN에 훼손된 Lena 영상 을 복원한 결과 29.83[dB]의 PSNR을 나타내었으며, 시 뮬레이션에 사용된 기존방법에 비해 각각 2.37[dB], 4.17[dB], 1.78[dB], 1.58[dB] 개선되었다.
향후 잡음환경에서 사용되는 물체 감지 및 인식, 추적 과 같은 영상처리에 기반한 시스템에 적용하는 연구를 진행할 예정이다.
REFERENCES
[ 1 ] P. S. V. S. Sridhar and R. Caytiles, “Efficient Cloud Data Hosting Availability,” Asia-pacific Journal of Convergent
Research Interchange, vol. 3, no. 2, pp. 11-19, Jun. 2017.
DOI: 10.21742/APJCRI.2017.06.02.
[ 2 ] R. Lai, Y. Mo, Z. Liu, and J. Guan, “Local and Nonlocal Steering Kernel Weighted Total Variation Model for Image Denoising,” Symmetry 2019, vol. 11, no. 3, pp. 1-16, Mar.
2019. DOI: 10.3390/sym11030329.
[ 3 ] K. Kai, L. Tingting, X. Xianchun, Z. Guoquan, and Z.
Jianxin, “Study of Infrared Image Denoising Algorithm based on Steering Kernel Regression Image Guided Filter,”
in 2019 18th International Conference on Optical
Communications and Networks (ICOCN), Huangshan :
China, pp. 1-3, 2019. DOI: 10.1109/ICOCN.2019.8934701.[ 4 ] K. Ote, F. Hashimoto, A. Kakimoto, T. Isobe, T. Inubushi, R. Ota, A. Tokui, A. Saito, T. Moriya, T. Omura, E.
Yoshikawa, A. Teramoto, and Y. Ouchi, “Kinetics-Induced
Block Matching and 5-D Transform Domain Filtering for Dynamic PET Image Denoising,” IEEE Transactions on
Radiation and Plasma Medical Sciences, vol. 4, no. 6, pp.
720-728, Nov. 2019. DOI: 10.1109/TRPMS.2020.3000221.
[ 5 ] X. Long and N. H. Kim, “An Improved Weighted Filter for AWGN Removal,” Journal of the Korea Institute of
Information and Communication Engineering, vol. 17, no.
5, pp. 1227-1232, Mar. 2013. DOI: 10.6109/jkiice.2013.17.
5.1227.
[ 6 ] M. Diwakar and M. Kumar, “Edge preservation based CT image denoising using Wiener filtering and thresholding in wavelet domain,” in 2016 Fourth International Conference
on Parallel, Distributed and Grid Computing, Waknaghat :
India, pp. 332-336, 2016. DOI: 10.1109/PDGC.2016.7913171.[ 7 ] M. Chowdhury, J. Gao, and R. Islam, “Fuzzy Logic Based Filtering for Image De-noising,” in 2016 IEEE International
Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver,
BC : Canada, pp. 2372-2376, 2016. DOI: 10.1109/FUZZ- IEEE.2016.7737990.[ 8 ] J. S. Lee, S. J. Ko, S. S. Kang, J. H. Kim, D. H. Kim, and C.
S. Kim, “Quantitative Evaluation of Image Quality using Automatic Exposure Control & Sensitivity in the Digital Chest Image,” The Journal of the Korea Contents
Association, vol. 13, no. 8, pp. 275-283, Aug. 2013. DOI:
10.5392/JKCA.2013.13.08.275.
천봉원(Bong-Won Cheon)
2018년 2월 부경대학교 제어계측공학과 졸업 2020년 2월 부경대학교 제어계측공학과 공학석사 2020년 3월~현재 부경대학교 대학원 스마트로봇
융합응용공학과 박사과정
※관심분야 : 영상처리
김남호(Nam-Ho Kim)
제11권 제1호 참조
1992년 3월~현재 부경대학교 공과대학 제어계측 공학과 교수
※관심분야 : 영상처리, 통신시스템, 적응필터와 웨이브렛을 이용한 잡음제거 및 신호복원