논문 2011-48SC-4-12
GPS를 이용한 선박 위치 및 자세 형상 제어 연구
( A Study of the Location and Shape of the Ship using GPS )
박 정 원*, 김 한 실***
( Jungwon Park and Hansil Kim )
요 약
파도 및 바람 그리고 그 외의 다른 요인들에 의해 복합적으로 움직이는 모선 선박의 운동을 정확하게 알아야 배의 형상 및 자세를 제어할 수 있다. 예를 들어 레이더 추적 장비는 기후의 영향은 받지 않으나 물체에 반사된 신호로 위치 추적을 해야 하기 때문에 잡음도 (Noise Level)가 높아 정확도가 떨어진다. 이를 해결하기 위해 본 논문의 목적은 GPS의 절대 위치를 이용 하여 배의 이전 상태 및 현재 상태를 정확히 알아서 다음 진행 상황을 예측하는데 있다. 그러나 GPS의 원천 오차와 배가 고 정적이지 않는 오차로 인하여 단순하게 GPS의 값을 읽어 배의 형상을 나타낼 수 없기 때문에 본 논문에서는 이러한 GPS좌표 의 오차를 줄이고 정확한 지점을 추정하기 위한 알고리즘을 제시하여 선박의 형상과 위치를 알려준다.
Abstract
The ship movement implies current position, wave, wind, and its other factors. We need to know exactly the location and the shape of the ship and control its motion because of these effects. In order to control the small ship according to the movement of the large ship, the position and shape of the ship should be given first. In this paper we propose the method with which we know the current status of the ship without dynamic equations of the ship. There are several methods to track the system such as optical, radio frequency, radar, camera, and infrared light. We propose the movement of the ship using the GPS absolute axis. But, the genuine error by the GPS itself and the movement of the ship cause the result of the GPS of not being accurate. This paper reduces the error of the location and the shape of the ship and gives the exact values of the ship movements even if the GPS implies some error itself.
Keywords : GPS, 선박, 위치제어, Triangulation, geographic, Virtual point
Ⅰ. 서 론
박 운항에 있어서 어려운 작업 중 하나가 바로 육지 에 접안을 하는 것이다. 비행기는 착륙이 어렵고 자동 차는 주차하기 어려운 것과 같이 선박은 항구에 접안하 는 것이 어렵다. 이는 사람의 경험에 의존적이고 사고 의 위험성이 외부요인과 더불어 오직 운전자의 실수에 의해 결정되는 등의 문제가 발생하기 때문이다. 특히 선박의 경우 차량이나 비행기와 달리 운동가속도가 작
* 정회원, 울산대학교 전기공학부 (University of Ulsan)
※ 이 논문은 현대중공업 지원에 의한 울산대학교 전 기공학부 일류화 연구비에 의하여 연구되었음 접수일자: 2010년12월1일, 수정완료일: 2011년6월17일
은 반면, 큰 관성력을 가지며 풍랑이나 파랑 등의 외부 환경에 많이 노출 되어있기 때문에 접안 하는데 어려움 을 가지고 있다. 본 논문이 제안 하는 방법은 배의 원활 한 접안 및 작업을 하기 위해 이전 상태와 현재 상태를 정확히 운전자에게 알려주는데 있다.
관성력이 매우 큰 대형 선박을 접안하는 경우 특별한 방법을 필요로 한다. 현재 육지에 있는 항구에 접안을 할 때에는 유도선인 Tug-Boat가 접안 대상 선박을 밀 고 당기는 과정을 반복하여 접안을 한다. 하지만 지금 하려고 하는 것은 대형 컨테이너선이 인근해에 정박되 어있고 거기에 소형선박이 다가가 접안하여 화물을 옮 겨 가지고 가는 방법을 시행하기 때문에 여러 가지 이 점이 많다. 하지만 이는 또 다른 문제를 야기한다. 배가
가지고 있는 많은 외부 요인들을 감안하여 수식적인 방 법으로 풀어 나가야하는데 모든 요소들을 고려하게 된 다면 이는 거의 불가능한 수식을 풀어야만 한다.
선박의 대수적인 침로와 속력 산출을 할 때 선박에 작용하는 바람과 해조류의 영향도 참작 할 수 있게 되 었다. 이렇게 선박에 미치는 바람과 해조류의 영향을 참작하여 선위를 수식으로 계산하는 방법을 Deduced reckoning 즉 연역 위치측정법이라고 한다. Dead reckoning은 선박에 미치는 바람과 해조류의 영향이 없 다는 가정 하에 선위를 수식으로 계산하는 방법을 의미 하며 바람과 해조류의 영향을 참작하여 선위를 연역해 내는 Reduced reckoning과는 본질적으로 다른 의미를 가지고 있다. 정확한 배의 형상을 알기 위해 GPS 3점 측위를 이용하여 면을 만들어 현재 배의 상태를 알아내 는 방법이다. 또한 이전 상태를 알고 현재 상태를 알면 배의 형상을 알 수 있다. 본 논문에서는 이러한 방법을 수식적으로 보이고 실제 실험으로 보여준다.
Ⅱ. 본 론
1. GPS 위성신호
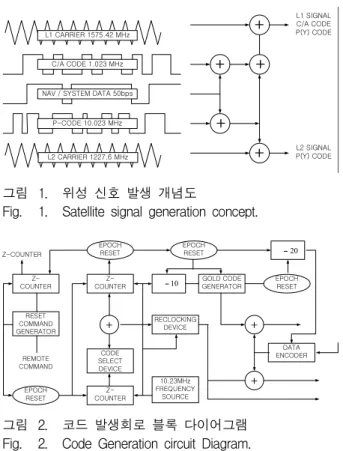
GPS 위성을 이용하는 사용자는 위성 신호를 수신하 여 처리하는데 위성신호에는 반송파와 PRN부호 그리 고 항법 메시지로 구성되어 있다. 반송파는 기본주파수 10.23MHz에 각각 154배와 120배로 증가시켜 전리층의 영향을 최소화 시킨 L파장대로 주파수 1575.42MHz인 L1과 1227.60MHz인 L2로서 위성의 위치 계산을 위한 케플러요소와 자료신호를 포함한다. 이중주파수 GPS는 GPS 시간체계를 세계시와 연관시키며, 전리층에 대한 보정을 실시하여 굴절보정이 가능하게 하는 정보를 포 함하고 있다. 위치측량을 위해 전송되는 정보는 50bit/sec의 bit 정보로써 L1 주파수에는 1.023MHz로 C/A code와 이보다 10배 빠른 13.23MHz로 P code가 변조되어 실리게 되는데, 이는 매초 30m의 파장으로 107의 이진부호가 전송되는 양이다. 또한 C/A code의 1/10의 주파수를 가지므로 300m의 파장을 가지며 L2주 파수에는 P Code만 실리게 된다. 여기에 나오는 L1, L2 파를 이용하여 GPS의 데이터를 측정하게 된다.
2. 배에 GPS 위치
배에 실려 있는 컨테이너는 언제나 일정하게 실려 있 지가 않다. 하지만 배는 항상 무게중심을 유지하려는
L1 CARRIER 1575.42 MHz
C/A CODE 1.023 MHz
NAV / SYSTEM DATA 50bps
L2 CARRIER 1227.6 MHz P-CODE 10.023 MHz
L1 SIGNAL C/A CODE P(Y) CODE
L2 SIGNAL P(Y) CODE
+ + +
+ +
그림 1. 위성 신호 발생 개념도Fig. 1. Satellite signal generation concept.
Z- COUNTER
RESET COMMAND GENERATOR
REMOTE COMMAND
EPOCH RESET
EPOCH RESET
Z- COUNTER
CODE SELECT DEVICE
Z- COUNTER
+
EPOCH RESET
10 GENERATORGOLD CODE
RECLOCKING DEVICE
10.23MHz FREQUENCY
SOURCE
20
EPOCH RESET
+
DATA ENCODER
+
Z-COUNTER
그림 2. 코드 발생회로 블록 다이어그램 Fig. 2. Code Generation circuit Diagram.
복원력이라는 성질을 가지고 있고 배 설계상으로도 중 심을 유지하도록 설계되었기 때문에 배에 GPS를 설치 할 때에는 배의 정중앙을 기점으로 설치하고 이등변 삼 각형 모양을 이루도록 설치한다. 그 이유는 각 축에 설 치하고 길이가 동일하게 되면 계산식이 줄어들고 연산 이 훨씬 쉬워지기 때문이다. 하지만 Z축 방향으로 GPS 를 공중에 설치하기 어렵다. 그래서 기준점에서 GPS를 측정하고 가상의 Z축 방향에 있는 GPS의 위치를 알아 내기 위해 다음과 같은 방법을 사용한다. 그리고 그 위 치에 있는 GPS의 좌표를 Virtual Point라고 부른다.
2.1. Z축 방향의 가상 GPS좌표 구하기
3점을 이용하여 평면의 방정식을 구하기 위해 먼저 평면에 수직인 벡터를 정의하면 그 벡터를 평면의 법선 벡터라고 부르고 이 법선벡터는 주어진 평면에 어떤 벡 터가 수직이라고 할 때 평면위에 모든 벡터에 그 벡터 가 직교 하는 것을 말한다. 점 를 지나면서 0이 아닌 벡터 에 수직인 평면의 방 정식을 구해보면 평면위의 임의의 점을 라고 하고 ⊥ 이므로 · 에서
란 식을 얻는다.
역으로 임의의 상수들 a, b, c에 대해 평면방정식
을 만족하는 공간상의 점들의 집합을 생각해 보면 두 점 가 주어진 식을 만족한다면 식 (2.1-1)과 같은 식을 얻을 수 있다.
(2.1-1)
식 (2.1-1)을 정리하면 식 (2.1-2)와 같다.
(2.1-2)
위의 식을 이용하면 중점에서 직각 방향의 Virtual Point를 계산하여 구할 수 있다.2.2. GPS의 좌표로 본 배의 모습
배가 정박하게 되면 정확히 이등변 삼각형을 이루게 된다. 하지만 외부의 외란이나 GPS가 가지는 오차도 있다. 그래서 정확한 이등변삼각형 모양을 가지지는 않 는다. 심지어 삼각형이 그려지지 않을 때도 있다. 이런 오차를 감안하여 3점의 데이터를 받으면 어떠한 상태에 서도 삼각형 모양을 만들 수 있다. 주어진 세 점에서 측 정한 GPS 좌표는 일정 밀집 군을 형성하면서 나타나게 된다. 실시간으로 받은 데이터 끼리 연동 하였을 때 일
그림 3. 배에 설치되는 GPS좌표와 좌표 형태.
Fig. 3. Install GPS position and Standard coordinates.
그림 4. 분포도 안에 형성되는 삼각형의 여러 모습 Fig. 4. Distribution in the figures of the triangle formed.
부 데이터를 잃어버리게 되는 경우도 있고, 데이터가 회손 되었을 경우도 있으며 값이 심하게 벗어나는 경우 도 있다. 그림 4는 절대 거리정보와 한 포인트의 정밀 도를 높이는 방법을 사용하여 항상 최적 상태의 삼각형 을 나타낸다.
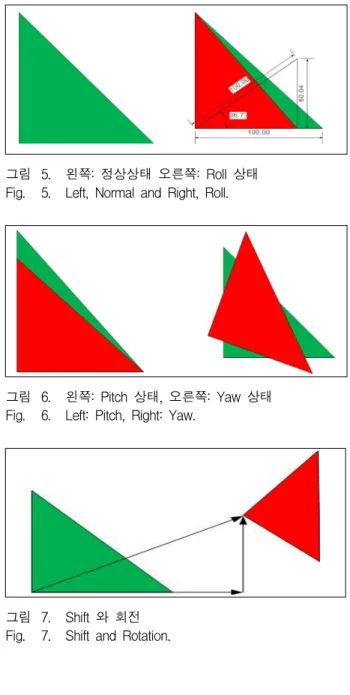
그림 4의 삼각형에서 선박의 Roll, Pitch, Yaw에 따 라 그림 5, 6, 7과 같이 각각의 3가지 형태를 가진 모양 이 나오게 된다.
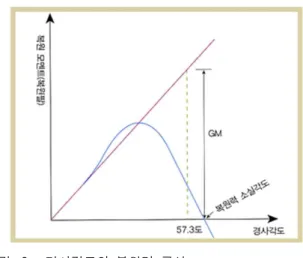
일반적으로 배는 복원력이라는 것을 갖는다. 복원력 이란 배가 전복될 수 있는 한계수치를 나타내며 배의 경사도가 57.3도가 넘어가면 복원력이 상실되면서 배 가 전복되는 것이다. 일반적으로 평범한 풍랑, 풍속, 및 파고에 의해 배가 기울어지는 각은 5도에서 30도 미만이다.
그림 5. 왼쪽: 정상상태 오른쪽: Roll 상태 Fig. 5. Left, Normal and Right, Roll.
그림 6. 왼쪽: Pitch 상태, 오른쪽: Yaw 상태 Fig. 6. Left: Pitch, Right: Yaw.
그림 7. Shift 와 회전 Fig. 7. Shift and Rotation.
그림 8. 경사각도와 복원력 곡선 Fig. 8. Curve slope angle & resilience.
2.3 배의 회전각
가. 일반적인 계를 포함하는 Mapping
배의 상태를 알기 위해서는 이동한 거리와 각축의 회 전각을 알아야한다. 이를 위해서 각각의 계와 그의 계 의 상관관계에 대해 알아야한다.
어떤 계{B}에 관하여 벡터의 표시를 알고 다른 계 {A}에 관하여 이 벡터의 표시를 알기를 위해 일반적으 로 사용하는 방법이 Mapping하는 방법이다. 여기서 계 {B}의 원점은 계{A}의 원점과 일치하지 않으면 일반적 으로 벡터 오프셋을 갖고 있다. {B}의 원점에 위치하는
벡터를 라고 한다. 또한 {B}가 {A}에 기준하여
회전한 양은 로 표시한다. 가 주어졌을 때, 아래 의 그림 9와 같이 를 계산하면 된다.
처음에 {A}와 같은 방위를 가지면서 원점이 B와 일 치하는 중간 계에 관하여 를 변환한다. 이 과정은
를 왼쪽에서 곱하는 것으로 해결되고 그 후 간단한
그림 9. 벡터의 일반적인 변환
Fig. 9. General transformation of the vector.
벡터 합으로 전위를 나타낼 수 있다.
(2.3-1)
식 (2.3-1)은 하나의 계에서 다른 계로 벡터의 표시 를 변환하는 일반적인 Mapping을 나타내는 식으로 식 (2.3-2)와 같이 실제크기인 행렬식으로 나타낸다.
(2.3-2)
을 제외한 나머지 미지수는 GPS의 데이터에서 알아 낼 수 있다. 그래서 를 구하기 위하여 Z-Y-Z 오일러 각도를 구하는 방법이다.
나. Z-Y-Z 오일러 각도
방위를 표시하는 방법에는 여러 가지 방법이 있는데 그중 하나가 Z-Y-Z오일러 각도이다. 오일러 각도의 형 태는 Z-Y-X와 Z-Y-Z형태를 많이 사용하며 기본적인 식은 식 (2.3-3)과 같으며 주어진 식을 이용하여 GPS를 통해 구할 수 있는 데이터 외에 나머지 미지수를 구할 수 있다.
′ ′′
(2.3-3)
위의 식에서 c는 cos을 s는 sin을 나타낸다. 그리고 이 회전행렬로부터 Z-Y-Z 오일러 각을 계산하는 방법 은 식 (2.3-4)와 같다.′ ′ ′
(2.3-4)
임의의 변수 로 치환하여 각각의 관계식을 풀면 아래의 식과 같이 를 구할 수 있게 된다. 여기 서 sin ≠ 이면 식 (2.3-5)를 이용하여 각 를 구할 수 있다.
(2.3-5)
여기서 는 tan 를 표시하며 4 분면에 모든 각도가 존재하는 것을 나타내기 위하여 x, y 2개의 부호 모두를 이용한다. atan함수는 한 개의 변 수만을 가지지만 여기서 사용하는 변수는 두 개의 부호 모두를 이용하기 때문이다. 따라서 본 논문에서는 명령 문 를 사용한다.
다. GPS에서 획득하는 데이터 형식 분석 및 계산 식 (2.3-5)를 이용하면 한 지점에 3개의 데이터가 있 기 때문에 총 9개의 식이 나오게 된다. 계산할 때 GPS 에서 받은 좌표를 사용하기 때문에 를 알고
을 알고 를 알 수가 있어 Rotation Matrix를 구할 수 있다. GPS를 이용하여 구하는 방법은 다음과 같다.
GPS의 데이터는 NMEA 규약방식의 GPGGA명령어 를 이용하였고 이 데이터는 각 기기가 주고받는 정보는 taler sentence와 query sentence로 구분된다. 모든 sentence는 $로 시작하며 실제 데이터를 보면 다음과 같다.
$GPGGA,022350.50,3532.7011,N,12915.5952,E,1,07,1.2,1 5.69,M,29.67,M,,*5F 이런 방식으로 나오게 되는데 가장 앞에 있는 $GPGGA는 현재 GPS의 Fix Data에 관한 정보를 보내고 있다는 것이며 022350.50은 그리니치 표 준시로 현재 02시 23분 50.50초를 나타낸다.
3532.7011,N,12915.5952,E 이 값은 좌표로서 위도 경도 를 표시하는 것이다. 우리나라에서는 북위와 동경밖에 표시되지 않는다. 1은 GPS Quality Indicator로서 0- fix not available. 즉, GPS가 위성 신호를 제대로 잡지 못해서 좌표를 알 수 없으며, 1- GPS fix 위성 신호를 잘 수신해서 좌표를 인식하며, 2- Differential GPS fix Differential GPS는 지상이나 위성에서 differential gps 정보를 받아 fix data를 구했다는 것을 의미한다. 07은 현재 7개의 위성으로부터 정상적인 데이터 수신이 이루 어지고 있는 것을 나타내며 1.2 오차 보정할 때 사용하 는 값이 된다. 15.69,M,29.67,M는 WGS-84표준에 의한 가상의 타원형 지구의 해수면으로부터 15.69m위에 있 다는 이야기 이며 29.67M은 가상의 해수면을 나타내는 것이다. 마지막으로 *5F는 모든 데이터를 check sum 으로 모든 데이터를 XOR값을 16진수로 표현한 것이다.
Novatel의 ProPak-G2를 이용하여 초당 10개씩 데이터 를 수신하여 x, y, z 데이터를 추출하는 프로그램을 생 성하였다. 여기서 획득한 데이터를 사용하는데 벡터의 길이를 meter로 통일시키기 위하여 다음의 방법을 사용
대한민국
위도1초 30.8m 위도1분 1.85km 위도1도 111km 경도1초 24.69m 경도1분 1.48km 경도1도 88.9km 표 1. 대한민국 도, 분, 초당 해당하는 거리
Table 1. The distance of the degree, minute, second in korea.
그림 10. GPS 데이터를 이용한 벡터 변환
Fig. 10. Using Current value and previous value of the GPS Vector conversion.
하였다.
위의 값을 이용하여 meter로 환산하여 변환 벡터를 계산할 수 있다.
그림 10은 과거의 배 형상에서 현재의 형상을 알기 위해 GPS가 측정한 데이터를 이용하여 만든 벡터 변환 과정이며 N은 위도 중 북위를 나타내는 표시이고, E는 경도 중 동경을 나타내는 표시이다. Top은 삼각형모양 에서 위의 좌표를 의미하며 Right는 오른쪽 좌표 Center는 중간점을 의미하는 것이다.
현재 값에서 이전 값을 빼주면 각 위치의 벡터를 구 할 수 있다. GPS데이터는 절대 좌표이기 때문에 meter
환산법을 사용하면 식 (2.3-6)이 된다.
(2.3-6)
과 는 위의 표1에 나와 있는 미터변환을 위한
상수이다. Rotation Matrix인
값을 제외한
모든 데이터를 GPS좌표로 획득 할 수 있기 때문에 Rotation Matrix를 구할 수 있고 이 값은 배가 현재 어 떤 상태로 있는지 나타낸다.
Ⅲ. 실 험
실험을 하기 위해 Novatel 사의 ProPak G2 GPS 장 비 및 3개의 GPS 안테나와 통신하기 위한 통신장비를 구축하였다.
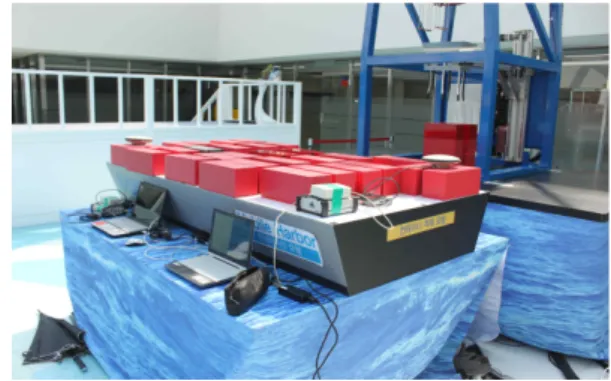
이 통신 장비를 이용하여 카이스트 건물 내의 모바일 하버 크레인 팀에 설치되어있는 모형 선박에서 실험하 였다. 그림 12는 KAIST 내의 선박에 설치된 선박의 실 제 모형이다.
파도에 의해 배가 흔들리는 모습을 가상 실험해 볼 수 있게 만든 장비로써 3축을 일정각도로 움직이게 만 든 컨테이너 적재 모형이다. 설치된 선박의 위치는 천 장이 유리창이지만 상부가 막혀있는 상태이기 때문에 정상 데이터뿐만 아니라 정상에서 많이 벗어난 데이터 들이 수신되었다. 일단 배가 주기적으로 흔들릴 때
그림 11. GPS장비와 통신모듈
Fig. 11. GPS equipment and communication modules.
그림 12. Mobile Harbor에 설치한 모습 Fig. 12. Mobile Harbor installed appearance.
A
B
C
그림 13. 이전 배 좌표 형상과 현재 배 좌표의 형상 Fig. 13 Coordinates of the previous and current location.
GPS가 가지는 데이터 표본을 얻고 정밀도를 높이기 위 해 일정량의 거리를 지정해 놓고 3점을 측정한 후에 다 시 일정량 이동하여 3점을 측정하여 두 개의 데이터를 가지고 시뮬레이션을 해보았다. 그림 13은 이전 형상의 3점과 현재 3점을 가지고 시뮬레이션 한 결과이다.
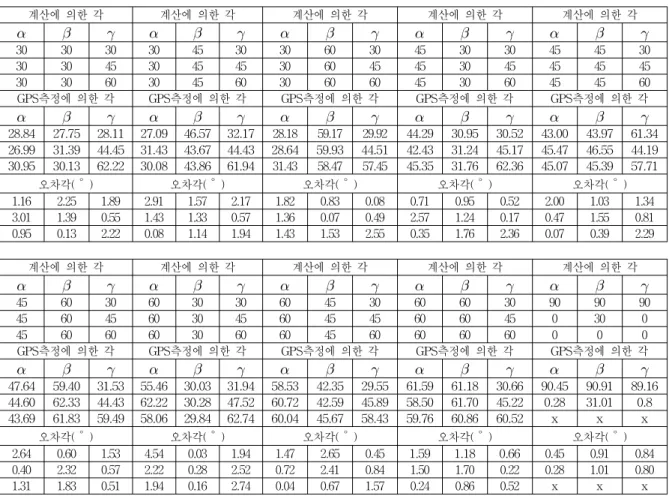
그래프 상에서 상단에 위치한 A 좌표는 GPS로부터 받은 데이터로 구현한 이전 형상이고 바로 아래쪽의 B 좌표는 본 논문의 알고리즘에 의해 계산된 이전 형상 이다. 가장 아래에 나타난 C 좌표는 현재 형상이다. 이 전 좌표에서 얼마만큼 이동하여 Roll, Pitch, Yaw한 모 습을 볼 수가 있다. 여기서 발생한 오차는 그래프에 나 타난 것처럼 많은 오차가 발생하지 않는다. 계산에 의 한 좌표와 GPS를 이용하여 받은 좌표의 정확도를 알 기 위해 대표적인 각을 기준으로 정리하여 표 2에 첨 부하였다.
계산에 의한 각 계산에 의한 각 계산에 의한 각 계산에 의한 각 계산에 의한 각
30 30 30 30 45 30 30 60 30 45 30 30 45 45 30
30 30 45 30 45 45 30 60 45 45 30 45 45 45 45
30 30 60 30 45 60 30 60 60 45 30 60 45 45 60
GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각
28.84 27.75 28.11 27.09 46.57 32.17 28.18 59.17 29.92 44.29 30.95 30.52 43.00 43.97 61.34 26.99 31.39 44.45 31.43 43.67 44.43 28.64 59.93 44.51 42.43 31.24 45.17 45.47 46.55 44.19 30.95 30.13 62.22 30.08 43.86 61.94 31.43 58.47 57.45 45.35 31.76 62.36 45.07 45.39 57.71
오차각() 오차각() 오차각() 오차각() 오차각()
1.16 2.25 1.89 2.91 1.57 2.17 1.82 0.83 0.08 0.71 0.95 0.52 2.00 1.03 1.34 3.01 1.39 0.55 1.43 1.33 0.57 1.36 0.07 0.49 2.57 1.24 0.17 0.47 1.55 0.81 0.95 0.13 2.22 0.08 1.14 1.94 1.43 1.53 2.55 0.35 1.76 2.36 0.07 0.39 2.29 표 2. GPS 데이터와 시뮬레이션 비교
Table 2. Comparison of GPS data and simulation.
계산에 의한 각 계산에 의한 각 계산에 의한 각 계산에 의한 각 계산에 의한 각
45 60 30 60 30 30 60 45 30 60 60 30 90 90 90
45 60 45 60 30 45 60 45 45 60 60 45 0 30 0
45 60 60 60 30 60 60 45 60 60 60 60 0 0 0
GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각 GPS측정에 의한 각
47.64 59.40 31.53 55.46 30.03 31.94 58.53 42.35 29.55 61.59 61.18 30.66 90.45 90.91 89.16 44.60 62.33 44.43 62.22 30.28 47.52 60.72 42.59 45.89 58.50 61.70 45.22 0.28 31.01 0.8 43.69 61.83 59.49 58.06 29.84 62.74 60.04 45.67 58.43 59.76 60.86 60.52 x x x
오차각() 오차각() 오차각() 오차각() 오차각()
2.64 0.60 1.53 4.54 0.03 1.94 1.47 2.65 0.45 1.59 1.18 0.66 0.45 0.91 0.84 0.40 2.32 0.57 2.22 0.28 2.52 0.72 2.41 0.84 1.50 1.70 0.22 0.28 1.01 0.80 1.31 1.83 0.51 1.94 0.16 2.74 0.04 0.67 1.57 0.24 0.86 0.52 x x x
Ⅳ. 결 론
본 논문은 GPS를 이용한 선박의 자세형상을 알아보 기 위하여 다음과 같은 방법을 제시하였다. GPS를 이 용한 좌표 값의 오차를 줄이고 배에 적용하기 위하여 z 축 방향의 Virtual Point를 찾아냈으며 실험적으로 GPS 의 L1, L2파형을 이용하여 배의 형상이 어떤 형태로 보 이는지 실험 및 시뮬레이션을 통하여 확인하였다. 실제 로 정확한 수식에 입각하여 수많은 실험의 반복을 통해 GPS의 오차를 줄였으며 자세를 알기 위한 오일러 공식 을 적용함으로써 수식적으로도 현재 배가 어떤 상태에 있는지 알 수 있게 되었다. 실험에서 GPS가 가지는 좌 표의 오차 때문에 어느 정도 벗어나지만 계산되어진 값 과 1도~3도 사이의 오차를 가지고 평균적으로 1.2539도 로 나오는 것을 보아 이와 같은 알고리즘을 이용하면 배가 어떤 형상으로 있는지 알 수가 있다. 현재는 L1, L2파형만을 이용하여 측정하였는데 DGPS를 구현하면 더욱 정밀한 값을 얻을 수 있을 것이다.
모바일 하버라는 모형 선박에 실험을 하였지만 실험 환경은 실제 파도와 같은 파고를 만들 수 있고, 배 흔들 림의 일정 주기를 계속 줄 수 있게 제작되었으며, 선풍 기를 이용한 바람과 같은 외란을 줄 수가 있었던 환경 에서 실험하였기 때문에 실제 선박에서도 충분히 가능 하다고 판단하였다.
다만 천장이 유리로 되어있지만 실내에서 GPS를 측 정하였기 때문에 많은 오차가 나타났다. 평지에서 적당 한 크기의 평면을 구성하여 측정하였을 때에는 오차가 적게 나타나는 것으로 보아 향후 계획은 배의 모니터링 시스템을 실제 대형선박에 직접 설치하여 DGPS로 구 현하여 실험하여 검정해보는 것이다.
참 고 문 헌
[1] John J. Craig, “Introduction to ROBOTICS Mechanics and control”, PEARSON Prentice Hall, pp49-50, pp69-70, December 2007.
저 자 소 개 박 정 원(정회원)
2009년 울산대학교 전기공학부 (공학사)
2011년 울산대학교 전기공학부 (공학석사)
2011년~현재 (주) SIS 근무
<주관심분야 : 항법장치 및 센서 고장진단, 위치 측정 및 제어 기술, GPS 응용>
김 한 실(정회원)
1981년 서울대학교 전기공학과 (공학사)
1983년 서울대학교전기공학과 (공학석사)
1991년 West Virginia Univ.
Electrical & Computer Eng. (공학박사) 1993년~현재 울산대학교 전기공학부 교수.
<주관심분야 : 선형 및 비선형 제어, 확률제어, H infinity, GPS 응용>
[2] Kido Lee, Yunsoo Choi, Impyeong Lee and Seokjae Sa “Experimental Comparison of Software for Real-time GPS Precision Position,”
GIS/RS 공동 춘계학술대회 , pp. 399-304, May 2005.
[3] 비스타 네 필립, 이필복, 정길도, “선박 항로 추적 시스템에서의 GPS, 디지털 콤파스, ENC” 대한전 자공학회 하계학술대회, 제33권, 1호, 1749~1751 쪽, 2010년.
[4] NMEA data, Table of Contents
http://www.gpsinformation.org/dale/nmea.htm [5] National Marine Electronics Association,
http://www.nmea.org/
[6] Mobile Harbor, KAIST 모바일하버 사업단, http://mhp.kaist.ac.kr
[7] Novatel Homepage, Support of Contents, Products, http://www.novatel.com
[8] B. Hofmann-Wellenhof, H. Lichtenegger, J.
Collins, “GPS Theory and Practice, 5/e”, Sigmapress, pp1-419, March 2009.
[9] 신철호, 김우숙, “전자항해학”, 효성출판사, pp159-186, February 2001.
[10] John J. Craig, “Introduction to ROBOTICS Mechanics and control”, PEARSON Prentice Hall, pp49-50, pp69-70, December 2007.
[11] 백승현, 박경린, 강성민, 이연석, 정태경, “INS/GPS 통합에 따른 관성센서 에러율 감소방법”, 대한전자 공학회지 제 46권 SC편 제 3호, 22~30쪽, 2009년 5월.
[12] 김찬모, 조용모, “GPS를 이용한 정밀 동기 클록 발생기 설계”, 대한전자공학회논문지 SD편 제38권 제6호, 64~73쪽, 2001년 6월.