1. 서론
수중음향환경에서 관심 음원의 탐지, 추적 및 식별기 술은 군사적인 목적뿐만 아니라 해양생물 관찰 및 해양 탐사 등 상업적으로도 많은 관심을 갖는 분야이다. 이러
다중 소노부이 체계의 신호합성기 및 성능검증용 시뮬레이터 개발
이수형†・ 박상배 ・ 한상규 ・ 권범수
Development of Synthetic Signal Generator and Simulator for Performance Evaluation in Multiple Sonobuoy System
Su Hyoung Lee
†・Sang Bae Park ・ Sang-Gyu Han ・ Bum Soo Kown
ABSTRACT
Sonobuoy is widely used as a very important sensor in combat management system using P-3 patrol aircraft due to its advantages of rapid searching into wide exploration range. It is necessary to verify the performance of developed sonobuoy system using various maritime test data in order to be successfully applied in combat management system. But it is difficult to acquire various real maritime data because it needs much time and effort. Therefore we have developed in this paper a synthetic signal generator and a simulator that they can verify the performance of sonobuoy system and evaluate its operational effectiveness without conducting maritime test.
We have synthesized target signals based on the characteristics of underwater sound sources, and then developed the synthesized signal generator which consider to sound propagation etc. like as underwater environment. And in the simulator development we use a HMI technique to enhance the convenience of operator, and design to verify the performance of sonobuoy system. The developed signal generator and simulator can be used as useful tools to evaluate the operational effectiveness such as optimal deployment of sonobuoy in combat management system using P-3 patrol aircraft.
Key words : sonobuoy, p-3 patrol aircraft, signal synthesis, LOFAR, DIFAR
요 약
소노부이(sonobuoy)는 넓은 지역을 빠르게 탐색할 수 있다는 장점으로 인해 P-3 초계기를 이용한 전투체계에서 매우 중요한 음향센서로 사용되고 있다. 소노부이 시스템을 개발하고, 이를 실제 전투체계에 성공적으로 적용하기 위해서는 다양한 해상시험을 통해 소노부이 시스템의 성능을 검증하여야 한다. 그러나 실제 해상 시험은 많은 시간과 노력이 동반되기 때문에 다양한 해상시험 데이터를 확보하기는 쉽지 않다. 따라서 본 논문에서는 실제 해상시험을 수행하지 않고서도 소노부이 시스 템의 성능을 검증할 수 있는 모의 신호합성기를 개발하였고, 소노부이 시스템의 효과도를 분석할 수 있는 시뮬레이터를 개발 하였다. 실제 수중 소음원의 특성을 고려하여 표적신호를 합성하였으며, 음파전달특성 등 실제 해양환경과 유사한 조건을 고려하여 소노부이용 신호합성기를 개발하였다. 시뮬레이터 개발에서는 HMI(Human Machine Interface) 기법을 사용하여 운용자 편이성을 높였으며, 다양한 조건에서 소노부이 시스템의 성능을 검증할 수 있도록 설계하였다. 개발한 신호합성기 및 시뮬레이터는 P-3 초계기를 이용한 전투체계에서 최적의 소노부이 배치 등 작전 효과도를 분석하는데 유용한 도구로 사용 될 수 있을 것이다.
주요어 : 소노부이, p-3 초계기, 신호합성, LOFAR, DIFAR
Received: 6 March 2021, Revised: 22 April 2021, Accepted: 26 April 2021
†Corresponding Author: Su Hyoung Lee E-mail: [email protected]
Uiduk University, Division of Energy and Electrical Engineering
한 목적으로 선진국에서는 많은 종류의 수중음향센서 시 스템이 개발되어 운용되고 있으며, 그 중에서 소노부이 (sonobuoy)는 넓은 영역을 신속히 탐색할 수 있기 때문에 P-3 초계기를 이용한 전투체계의 필수적인 요소이다[1]. 소노부이는 그림 1과 같이 플랫폼(platform)에서 수중에 투하되어 수중 표적의 음향신호를 획득하고, 이를 플랫폼 으로 송신하면 수신 신호처리 알고리즘을 이용하여 수중 표적을 탐지하고 위치를 추정하는 시스템이다.
Fig. 1. Sonobuoy of Surface Combat Management System
대표적인 소노부이 시스템으로 원거리 탐지를 위한 LOFAR(LOw Frequency Analysis and Recording) 소노 부이, 방위 추정을 위한 DIFAR(DIrectional Frequency Analysis and Recording) 소노부이[2,3], 표적의 심도를 추 정하기 위한 VLAD(Vertical Line Array DIFAR) 소노 부이 등이 개발되어 운영되고 있다.
소노부이를 이용한 표적의 방위각 추정 기법은 CODAR 기법과 JULIE 기법 등이 있다[3]. CODAR 기법은 두 개 의 소노부이를 1조로 하고, 2조를 간격으로 배치하 여 위상지연 상관관계를 이용하여 표적의 대략적인 방향 을 추정하는 방법이다. JULIE 기법은 적당량의 소노부이 를 일정 간격으로 뿌린 다음 폭발성 수중 음원을 투하하 여 표적에 반사되어 오는 반향음의 시간차를 이용하여 표적의 위치를 추정하는 Echo-Ranging 기법이다[1]. 그러 나 이러한 방법들은 표류 등으로 인하여 설치 센서들의 간격을 일정하게 유지하기가 어렵다는 단점이 존재한다. 이에 반하여 DIFAR 시스템은 무지향성(omni-directional) 센서와 지향성(directional) 센서가 동일한 축에 연계되어 있으며, 자기센서를 이용하여 자북에 대한 음원의 각도를 보정하여 표적의 방위각(bearing)을 구하기 때문에 취급 하기가 간단하다는 장점을 갖고 있다.
본 논문에서는 P-3 초계기를 이용한 전투체계에 적합 한 소노부이 시스템을 DIFAR 소노부이로 선정하고, 개
별 소노부이의 신호처리 기술과 다중 소노부이의 표적신 호 융합 및 표적 위치 추정기술을 개발 목표로 설정하였 다. 개발된 기술들이 전투체계에 적용되어 체계적응 성능 을 보이기 위해서는 실제 해양 환경에서 다양한 실험을 수행하여야 한다. 그러나 실제 해상시험을 수행하기 위해 서는 많은 시간과 경비가 소요되어 때문에 실제 해상시 험데이터에 대한 접근이 용이하지 않다.
따라서 해상시험데이터가 부족한 상황에서도 소노부 이 시스템의 성능을 분석하고 소노부이 배치에 따른 작 전 효과도를 평가할 수 있는 시뮬레이터 개발에 대한 연 구가 필수적이다. 따라서 본 논문에서는 실제 해상시험 환경을 고려하여 개별 소노부이의 신호를 합성하고, 소노 부이 시스템의 탐지 및 추적 기법의 성능을 분석하며, 작 전 효과도를 평가할 수 있는 다중 소노부이 시뮬레이터 를 개발하였다.
2. 소노부이 신호처리 기법
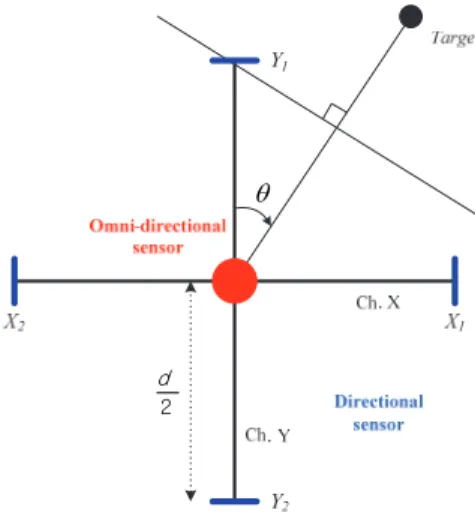
소노부이는 수신된 음향신호로부터 방향성 스펙트럼 을 검출하기 위하여 그림 2와 같이 3조의 수신 채널을 사 용한다[3]. 중심(원점)에 무지향성 센서가 위치하고, 이를 기준으로 상하 좌우에 의 간격으로 지향성 센서가 대 칭으로 배치되어 있다. 지향성 채널 및 에 입사되는 표적신호는 각각 sin및 cos의 가중치를 가지며, 무지향성 센서는 모든 방향에 대하여 균일한 가중을 가 진다. 이외에도 지향성 센서와 동일한 축에 연동되어 자 북에 대한 음원의 방위를 보정하기 위한 자기센서, 음탐 신호를 변조하기 위한 전자회로부, 그리고 송신케이블 및 송신 모듈을 탐재한 수상부이로 구성되어져 있다.
2 d
Fig. 2. Structure of Sonobuoy Sensor
각 센서에서 탐지된 신호들은 전자회로부에서 전처리 되어 RF 통신을 통해 수상함 플랫폼으로 송신된다. 플랫 폼의 수신기에서는 수신신호 처리기술을 이용하여 표적 을 탐지하고 방위각 정보 등을 추정한다. 수신신호 처리 기술은 광대역 탐지기법 및 협대역 탐지기법으로 구분할 수 있으며, 이에 대한 설명은 다음과 같다.
2.1 광대역 탐지 기법
광대역 에너지 탐지기법에서는 그림 3과 같이 지향성 센서의 각 채널 신호에 대하여 두 센서의 시간지연을 고 려한 지향성 빔을 형성하고, 빔출력 신호의 최대음압 감 지축(MRA : Maximum Response Axis)의 빔출력 에너 지를 비교하여 최대 응답을 주는 방위각을 추정하는 방 법이다[4]. 이들의 빔패턴은 그림 4와 같이 쌍극자(dipole) 형태로 나타난다[5,6]. 따라서 각 채널신호는 축과 동일한 방향의 신호만을 탐지하며, 축과 수직한 방향의 신호는 탐지가 불가하다. 공간상 보간법 등을 사용하여 방위 정 확도를 향상시킬 수 있으나, 일반적인 쌍극자형 빔형성 기법은 넓은 빔폭으로 인해 방위각 분해능이 제한적일 수밖에 없다.
2.2 협대역 탐지 기법
DIFAR 시스템의 협대역 신호처리 과정은 그림 5와 같다[7]. 송신기에 해당하는 소노부이의 전자회로부에서
) 2sin(
d
Fig. 3. Time Delay for Beamforming
X-axis Y-axis 0
90
180
270
Target signal
CH X CH Y
Fig. 4. Dipole Beampattern of Directional Sonobuoy Sensor
Audio Amplifier
Audio Amplifier
Qudrature Modulator
Subcarrier Generator
Qudrature Modulator
Reference Generator
Audio Amplifier Source
Y
X
) cos(t
) cos(t Ef
t Epcos2
) sin(
) 2
sin( t t Ed
)
'sin(t
Eo Directional Hydrophone
Omni-directional Hydrophone
Magnetic North
Excitation Coil Magnetic Compass
Y
X
t E
hd ssinsin t E
hd scossin t gcossin2
t gsinsin2
) sin(
cos
t Hd
) sin(
sin t Hd
) 2 sin( t G
) 2 cos(t G
t Essin
Fig. 5. Preprocessing of DIFAR Transmission Signal
무지향성 하이드로폰 신호, 지향성 하이드로폰 신호, 주 파수 및 위상 기준 신호를 변조하여 송신 신호를 발생시 킨다. 이와 같이 전 처리된 신호는 VHF 채널을 통해 플 랫폼으로 전달되며, 플랫폼의 수신기에서는 여러 가지 필 터를 이용하여 표적의 방위각 정보를 포함하고 있는 하 이드로폰 신호를 추출한다. PLL(Phase-Locked Loop) 기 법을 이용하여 송신파 신호의 주파수 및 위상을 복원하 고, 이를 통해 표적 신호를 분리하여 방위각을 추정한다.
Fig. 6. DIFAR Signal Processing
2.2.1 수신신호 처리부
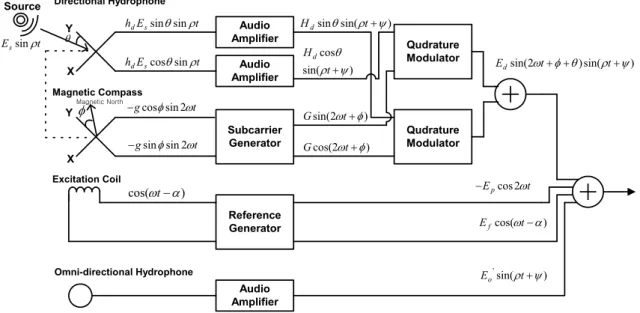
기준 축(Y축)으로부터 방향에서 표적신호가 입사할 때 각 센서의 신호처리 과정은 그림 6과 같다. 무지향성 센서신호는 증폭기에 의해 증폭되어 그대로 출력되며, 지 향성 센서신호는 증폭기에서 증폭된 후 자기 센서신호와 직교변조(quadrature modulation)되어 출력된다. 또한 기 준 발생기에서는 지향성 센서신호의 위상 복원을 위해 주파수 및 위상 기준신호를 발생시켜 출력한다. 주파수 분할 다중화 방식으로 합한 신호는 식 (1)과 같으며, 이들 신호가 플랫폼으로 전달된다.
sin sin
cos cos sin
(1)
여기서 첫 번째 항은 자기 센서신호와 직교 변조되어
나타난 지향성 신호를 나타내고, 두 번째 항과 세 번째 항은 각각 위상 및 주파수 기준신호를 나타내며, 마지막 항은 무지향성 센서신호를 나타낸다.
DIFAR의 출력은 수신기의 전단에서 처리되며, 이 신 호들의 출력 스펙트럼은 그림 7과 같다. 무지향성 하이드 로폰 신호(A), 직교 다중화된 지향성 하이드로폰 신호(C, E), 주파수기준 신호(B)와 위상 기준 신호(D)로 구분된다.
Fig. 7. Output Spectrum of Sonobuoy Signal
2.2.2 복조기 알고리즘
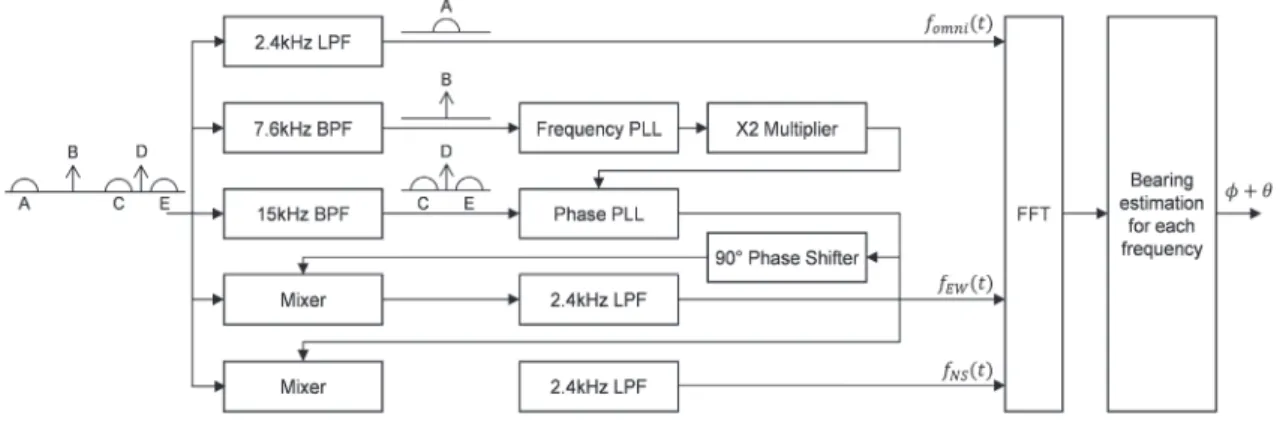
송신기로부터 전달받은 DIFAR 출력은 그림 8과 같은 복조기 알고리즘을 통해 음원의 협대역 주파수를 복원하 고, 각 주파수선에 대한 협대역 탐지 및 추적기법을 이용 하여 음원의 방위각 정보 를 추정한다.
먼저 각 신호의 주파수 대역에 적합한 필터를 이용하 여 DIFAR 수신 신호를 분리시킨다. 무지향성 하이드로 폰 신호를 분리하기 위해 2.4kHz LPF를 사용하며, 이 필 터를 통과한 신호는 복조기의 기준 신호로 사용된다. 주 파수 기준 신호 및 위상 기준 신호를 분리시키기 위해 각 각 7.5kHz 및 15kHz BPF를 사용하며, 분리된 신호는 주 파수 PLL 및 위상 PLL 기법의 입력으로 사용된다.
위상 기준 신호의 정확한 주파수와 위상 정보를 얻기 위해 두 번의 PLL기법[8]을 사용한다. 먼저 주파수 PLL 기법을 이용하여 기준 주파수를 추정한다. 추정한 주파수 의 두 배인 주파수는 위상 기준 신호의 주파수와 동일한
Fig. 8. Demodulation Algorithm in Surface Flatform
값을 갖는다. 따라서 주파수 PLL에서 얻어진 주파수의 두 배인 주파수를 이용하여 위상 PLL은 위상 기준 신호 의 정확한 위상을 추정한다.
주파수 PLL과 위상 PLL을 통해 얻어진 위상 기준 신 호의 주파수와 위상 추정치를 이용하여 지향성 하이드로 폰에 포함된 동서방향 신호와 남북방향 신호를 분리시킨 다. 그리고 FFT를 이용하여 음원의 주파수 스펙트럼을 구하고, 표적 고유의 주파수 토널 성분을 탐지한다. 표적 고유의 주파수 성분을 지속적으로 추적하면서 각 주파수 선의 협대역 방위각을 추정한다.
2.3 다중 소노부이 신호처리 기법
다수의 소노부이를 그림 9와 같이 공간상으로 서로 다 른 위치에 배치한 후 표적정보들을 탐지하여 이들을 융 합한다면 보다 신뢰성이 높은 추정정보를 얻을 수 있다. 또한 다중 소노부이를 사용한다면 삼각법 등을 이용하여 표적의 위치도 추정할 수 있는 장점이 있다[9,10].
ˆ11
ˆ12
ˆ22 21
ˆ
ˆ31
ˆ32
Fig. 9. Multiple Sonobuoy System
다중 소노부이를 이용하는 다중표적 다중센서(MTMS : Multi-Target Multi-Sensor) 시스템에서는 정보를 연계 하는 방식에 따라 중앙 집중 연계 방식 및 분산구조 연계 방식으로 구분될 수 있다[11,12]. DIFAR 소노부이 시스 템은 개별 소노부이에서 측정한 센서 신호를 변조하여 플랫폼으로 송신하며, 플랫폼에서 이를 복조하여 표적정 보(방위각 및 주파수 등)를 추출한다. 따라서 본 논문에 서는 중앙 집중 및 분산구조를 혼합한 구조의 연계방식 을 사용하였다.
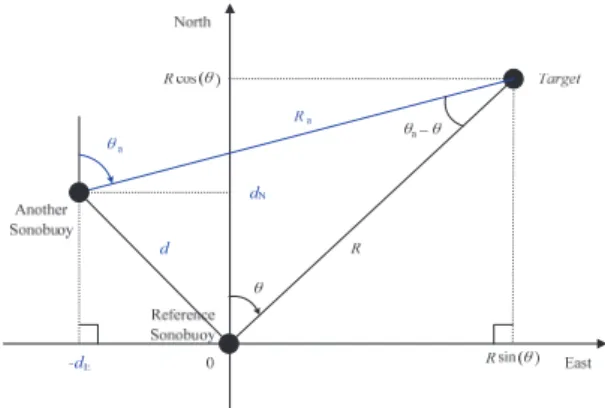
두 개의 소노부이가 그림 10과 같이 공간적으로 만 큼 떨어져 배치되어 있을 때, 각 소노부이의 방위각 추정 정보는 동일 표적에 대하여 서로 다르게 나타난다. 또한 별도의 신호처리기를 사용하여 방위각 정보를 추정하기 때문에 정보를 제공하는 시점이 서로 다를 수 있다. 따라
서 각 소노부이 추정정보들을 연계하기 위해서는 공간 및 시간에 대하여 동기화시키는 과정이 필수적으로 선행 되어야 한다[13].
Fig. 10. Deployment of Multiple Sonobuoy
동일 표적에 대하여 각 소노부이의 방위각 와 기준 센서의 방위각 의 위치정보의 차이를 공간적 바이어스 (spatial bias)라고 정의한다. 원거리 표적의 경우, 즉
≫ and 일 때 다음 식 (2)와 같이 근사화되며[14], 본 연구에서는 이 공식을 사용하여 공간적 바이어스를 보상하였다.
≅ tan
sin cos
(2)또한 각 소노부이의 추적정보들의 제공시점이 서로 다 르다면 연계 및 융합하기 전에 시간적 동기화 과정을 거 쳐야 한다. 시간 동기화 문제는 동일한 시점에서 추적정 보들을 제공하도록 시스템을 설계하는 단계에서 동기화 시키는 것이 가장 좋으며[13], 만약 그렇지 못하다면 보간 법을 사용하여 동기화 시킬 수 있다.
그림 10과 같이 한 쌍의 소노부이가 있을 때, 두 소노 부이와 표적이 이루는 삼각형의 꼭짓점의 각도와 서로 마주보는 선분의 비는 서로 일정하다. 따라서 삼각함수 공식을 이용하여 각 센서에서 표적까지 거리 및 는 다음과 같이 계산되어진다.
tan
(3a)
tan
(3b)다중 소노부이의 경우 소노부이가 가지는 오차로 인해 동일한 표적에 대한 각 소노부이 쌍이 추정한 위치는 정 확하게 일치하지 않는다. 따라서 다중 소노부이 추정 정 보들을 융합하기 위한 기법으로 본 연구에서는 LS(Least Square), WLS(Weighted LS) 및 TLS(Total LS) 알고리 즘을 적용하였다[15].
3. 신호합성기 개발
개발한 소노부이 시스템의 성능은 다양한 해상 시험데 이터에 대하여 검증되어야 한다. 그러나 실제 해양환경에 서의 다양한 해상시험 데이터를 획득하는 것은 많은 시 간과 노력이 수반되어야 하기 때문에 현실적으로 불가하 다. 따라서 다양한 해양환경을 모사한 모의 소노부이 신 호를 합성기를 개발하였으며, 모의 합성신호를 이용하여 다중 소노부이 시스템의 성능을 검증하기 위한 시뮬레이 터를 개발하였다.
그림 11은 표적으로부터 방사된 신호가 소나센서로 전파되는 과정을 나타낸다. 수중음파 전달매질을 통하여 직접 전달되는 경로와 해수면 및 해저면에 반사되어 전 달되는 경로 등 다중경로(multipath)가 존재한다[16]. 이러 한 전달경로는 음속구조(SVP : Sound Velocity Profile) 에 따라 직선 또는 곡선의 형태를 나타낸다. 또한 표적신 호가 사방으로 전파되면서 거리가 멀어짐에 따라 흡수 및 반사 등에 의한 전달손실(TL : Transmission Loss)이 발생되며, 센서의 기하학적인 구조에 따라 시간지연을 갖 고 각 센서에 도달하게 된다.
Fig. 11. Propagation of Target Signal in Underwater
이러한 음파전달경로를 고려한 각 소노부이 신호합성 과정은 그림 12와 같다. 기동시나리오 편집기에서 표적 개수, 표적의 기동정보 및 표적신호의 매개변수 등을 지 정하며, 환경모델 편집기에서 해양 환경변수들을 지정한 다. 운용자가 지정한 변수에 따라 표적신호를 생성하고,
음파전달경로를 따라 기준센서에 도달하는 동안의 전달 손실을 반영하며, 소노부이와 표적의 상대속도에 따라 각 주파수성분의 도플러 성분을 계산하여 반영한다. 센서의 기하학적인 배열 구조에 따라 기준센서와의 시간지연을 반영하여 각 센서에 수신된 표적신호를 계산한다. 표적신 호에 잡음을 추가한 후 여기에 소노부이 센서 모델에 맞 도록 각 신호들을 변조하여 최종 소노부이 송신신호를 합성한다.
Fig. 12. Synthesis of Sonobuoy Output Signal
수동소나에서 표적신호는 표적에서 방사하는 소음원 을 칭하는 것으로 대표적인 함정 소음원으로는 프로펠러 소음, 동력시스템에 의한 소음, 전원 및 보조 장비에 의해 발생되는 소음 등이 있다[14]. 이들은 서로 다른 특성을 나 타내며, 주파수 대역에 따라 광대역 신호 및 협대역 신호 로 구분할 수 있다.
그림 13은 표적신호 생성과정을 설명하는 블록 다이 어그램이다. 함정 소음원에 의해 발생되는 주파수선의 흔 들림(wander), 주파수선의 폭(line width), 음파 전달경로 에 따른 신호의 페이드(fade) 등을 고려하였고, 함정속도 (speed)를 변수로 하여 표적신호를 합성하였으며, 자세한 과정은 다음과 같다.
Fig. 13. Target Signal Synthesis Model
3.1 광대역 신호
함정에서 방사된 광대역 신호는 에너지가 넓은 주파수 대역에 걸쳐 나타난다. 이러한 광대역 신호특성을 나타내 는 소음원은 유체흐름소음, 공동소음, 날개진동, 선체공 진, 유압공진 등이다. 광대역 신호 성분은 다른 신호 성분 에 의해 변조되어 나타나므로 DEMON(Demodulation of Envelop Modulated On Noise) 분석을 통하여 찾을 수 있기 때문에 기본 축이나 프로펠러 주파수를 특정 주파 수로 변조하였을 경우 변조된 광대역 신호를 합성 할 수 있다. 이와 함께 함정의 선체에서 발생되어지는 광대 역 신호의 경우에는 측정된 신호를 기반으로 AR(Auto Regressive) 모델링 등을 하여 신호를 생성할 수 있다.
넓은 대역에 대해 원하는 형태의 레벨을 갖는 신호를 생 성하기 위해서는 1/3 Octave 밴드를 이용하여 각 밴드의 중심 주파수에 잡음 성분을 섞어서 신호를 생성 할 수 있다. 주파수 대역에서 신호를 생성 할 경우는 각 레벨에 맞추 어서 생성이 가능하나 시간 영역에서 신호를 합성하기 위 해서는 각 밴드의 중심 주파수를 이용하여 정현파를 생 성하고 생성된 신호를 밴드 대역폭 내의 주파수를 이용 하여 중심 주파수를 이동 시켜 광대역 신호를 생성한다. 변조 신호의 경우 프로펠러의 형태, 개수 및 회전수에 의해서 반복 생성된 신호를 광대역 신호를 변조 신호로 하여 생성한다. 광대역 신호는 앞에서 설명한 방법과 동 일하게 생성하며 프로펠러 신호는 각 날개의 회전 형태 를 모델링하여 생성한다.
3.2 협대역 신호
협대역 신호는 토널(tonal) 성분들로 구성되어지며 속 도에 영향을 받는 성분과 보조기기와 같이 속도에 상관 없이 일정한 주파수를 가지는 성분으로 나누어진다. 각 주파수 토널들은 흔들림 또는 지터(jitter) 라고 하는 시간 에 따른 주파수의 변이를 가지고 있으며 이와 함께 페이 드, 주파수선의 폭, 자세각(aspect) 등을 고려해야 된다.
3.2.1 주파수의 흔들림(wander)
표적이 일정한 속도로 운항하는 경우 추진기와 같은 동력 시스템에서 발생되는 소음은 일정한 주파수를 가지 는 토널 성분으로서 나타날 것이다. 그러나 실제 상황에 서는 해양 환경 등 외부 요인에 따라 항상 일정한 속도를 유지하는 것이 불가능하며 엔진과 같은 추진기도 완벽하 게 일정한 속도로 작동되는 것이 불가능하므로 시간에 따른 주파수선의 흔들림이 존재한다. 이는 함정에 따라 서로 다른 분포를 가지게 되는데, 예를 들면, 어선과 같이
상대적으로 높은 성능을 가질 필요가 없는 함정은 토널 성분이 상대적으로 많이 불안하게 나타나며 잠수함과 같 이 높은 신뢰성을 요구하는 함정의 경우에는 토널 성분의 흔들림이 적게 발생된다. 따라서 각 함정에 따른 실험 데 이터를 기본으로 흔들림의 분포를 결정하여 신호를 합성 하는 경우에 반영하여야 한다. 그림 14는 토널의 흔들림을 반영하기 위한 신호 합성 기법의 블록 다이어그램이다.
AWGN Generator
LPF (Coloring )
Center Frequency
Dithering
Tonal Generation
Fig. 14. Tonal Signal Synthesis using Frequency Jitter
3.2.2 페이드(fade)
표적에서 발생된 토널 성분은 수중에서 해양 환경에 따라 센서로 수신되는 전달경로가 결정되며 이러한 환경 에 따라 신호의 감쇄가 발생된다. 표적과 센서 사이의 기 하학적인 구조에 따른 다중 경로가 결정되기도 하며 해 수면에서 풍속에 따른 해수면의 변화가 시간에 따라 달 라질 수도 있으며 심지어 수중에서 이동하는 어류 등에 따라 전달되는 신호가 영향을 받기도 한다.
이러한 것들이 영향을 미치게 되어 수신된 신호는 시 간에 따라 신호의 크기가 임의로 변하게 되는 특성을 나 타난다. 따라서 앞서 사용한 완더 모델에서 운용자가 설 정한 환경에 따라 각 주파수 성분들의 세기(strength)를 변화시킴으로써 신호의 감쇄를 반영하였다.
3.2.3 주파수선의 폭
토널 성분을 발생시키는 소음원이 매우 불안정한 경우 에 짧은 시간에도 주파수 성분이 변할 수 있으며 이는 수 신된 토널 성분이 굵게 나타나는 요인이 된다. 하나의 표 적에서 발생하는 여러 토널 성분의 경우에도 소음원에 따라 주파수선의 선폭이 서로 다르게 나타날 수도 있다.
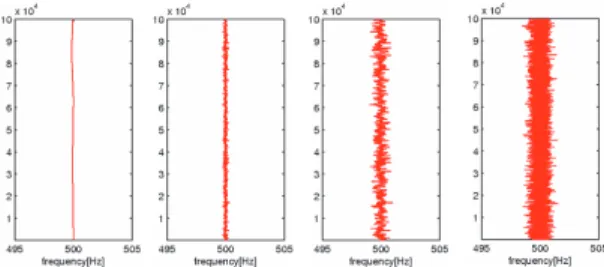
이와 같은 다양한 선폭의 구현을 위해서 아주 짧은 주기 를 가지는 흔들림 모델을 사용하며 선폭에 따라 발생시 킨 주파수선의 예를 그림 15에 나타내었다.
Fig. 15. Results of Variable Frequency Line Width
3.2.4 도플러 효과
표적 또는 센서를 포함하는 함정이 기동함에 따라 두 물체의 상대적인 속도 차이에 의하여 도플러 효과가 발 생한다. 따라서 신호 합성에서는 표적과 아함의 기동 시 나리오에 따라 상대속도를 계산하여 이를 각 토너 성분 의 주파수에 반영하여 도플러 효과를 구현한다[10].
3.2.5 전달 손실 및 다중경로
표적에서 방사된 소음은 주어진 해양 환경에 알맞은 전달경로를 통하여 센서에 수신된다. 이 경우 경로에 따 라 전달 손실도 발생하게 되며 해수면 또는 해저면에 반 사된 신호가 센서에 수신되는 다중경로 환경도 고려하여 야 한다.
본 시뮬레이터에서는 식 (4)와 같은 구형 모델(Spherical Model)의 전달손실을 사용하였다17,18]. 전달손실에 사용 되는 흡수손실 모델은 식 (5)와 같은 Thorp's attenuation model을 사용하였으며, 이를 간략화한 모델은 식 (6)과 같다.
log × (4)
× (5)
× (6)
3.3 소노부이 송신신호 합성
합성된 표적신호가 DIFAR 소노부이 시스템에 인가될 때 소노부이 송신 신호를 합성하는 과정은 그림 16과 같 이 송신신호 처리부의 변조된 신호를 합성한다. 앞 부분 은 음파 전달경로에 따른 손실을 나타내며, 뒤 부분은 그 림 6에서 설명한 DIFAR 송신신호 처리부를 나타낸다.
표적 기동시나리오에 따라 개별 소노부이에서 바라본 표적의 방위각 및 진북에 대한 각도 를 계산하고, 이에 따라 무지향성 센서신호 , 지향성 센서신호
, 주파수 기준신호 와 위상 기준신호 를 합 성한다.
Fig. 16. Synthesis of Sonobuoy Transmission Signal
3.4 신호 합성 결과
위와 같은 과정으로 합성된 소노부이 수신신호는 그림 17과 같다. 4.1절에서 설명할 함정모델 편집기에 따라 표 적의 광대역 및 협대역 신호를 생성하였다. 표적의 토널 성분은 70.352Hz의 기본주파수를 가지는 1, 2, 3차 고조 파(harmonic) 성분의 주파수들과, 128.539Hz의 주파수 성분이 표적 모델에 포함되었으며, 3개의 날개를 가지는 프로펠러를 모델링하여 DEMON 신호를 합성하였다. 그 리고 해양환경 편집기에 따라 생성된 표적신호에 배경잡 음을 추가하였고, 음파전달경로 및 다중경로에 따른 전달 손실을 반영하였다. 또한 표적기동 시나리오에 따른 도플 러 효과를 반영하였으며, 주파수선의 흔들림 및 페이드 등을 고려하였다.
Fig. 17. Synthetic sonobuoy sensor signal
그림 18은 소노부이 수신신호의 주파수 스펙트럼을 나타낸다. 함정모델 편집기의 설정에 따라 70.352Hz의 고조차 성분과 128.539Hz의 협대역 토널 성분들이 모델 에서 지정한 레벨에 비례하여 합성되었음을 확인할 수 있으며, 해양환경 편집기에서 설정한 신호대 잡음비에 따 른 광대역 잡음도 함께 존재함을 확인할 수 있다.
Fig. 18. Frequency spectrum of sonobuoy sensor signal
그림 19는 소노부이 수신신호의 주파수 스펙트럼의 크기를 색의 밝기로 변환하여 매 시간마다 워터폴(water fall) 형태로 전시한 LOFAR 전시화면이다. 신호의 세기 가 큰 주파수선은 흔들림이 비교적 작으며 지속적으로 나타난다. 그러나 크기가 작은 신호는 해양환경의 영향으 로 인해 흔들림이 크며 불안정하게 나타남을 확인할 수 있다.
Fig. 19. LOFAR display of sonobuoy sensor signal
그림 20은 소노부이 수신신호의 DEMON 스펙트럼을 나타낸다. 기본 주파수 및 이의 하모닉 성분들을 확인할 수 있으며, 이를 통해 표적의 프로펠러에 관한 특징 정보 들을 추출할 수 있다.
Fig. 20. DEMON spectrum of sonobuoy sensor signal
그림 21은 소노부이 수신신호의 DEMON 스펙트럼을 워터폴 형태로 전시한 DEMON 전시화면이다. 모델에서 함정의 속도에 따른 프로펠러 축의 회전수인 TPK(turn per knots)를 20으로 지정하였으며, 함정의 이동 속도가 10노트로 지정되어 있으므로 프로펠러는 분당 200회전 을 하게 되며, 3개의 날개에서 진폭 변조된 광대역 신호 들을 분석하는 DEMON 성분은 분당 600번 발생하게 된 다. 따라서 10Hz의 기본주파수를 가지는 고조파 성분들 을 결과에서 확인할 수 있다.
Fig. 21. DEMON display of sonobuoy sensor signal
4. 전시화면 및 시뮬레이터 개발
음원에 대한 탐지결과를 운용자에게 효과적으로 제시 하기 위하여 GUI 기법을 이용하여 다양한 전시화면을 개 발한다. 소노부이 배치에 따른 작전 효과도를 평가하기
위해 사용자가 소노부이와 표적의 배치, 그리고 표적의 이동 시나리오를 편집할 수 있는 시나리오 편집기를 구 성한다.
시나리오 편집기에서 구성된 시나리오는 실행 시 표적 이 기동하게 되며 실시간으로 소노부이가 표적을 탐지한 결과를 좌표평면 상에 표현한다. 또한 시나리오가 실행되 는 동안 각 소노부이별 LOFAR 화면을 전시하고, 방위각 추정 결과 등은 DIFAR 화면에서 전시한다.
4.1 시나리오 편집기
시나리오 편집기는 실제 해양 환경과 함정의 기동 상 황을 고려하여 신호합성 시에 고려해야 할 사항을 설정 하고 실행시키는 부분으로 그림 21과 같이 구성되어 있 다. 시나리오 편집 부분에서 표적은 붉은색으로 표시되 며, 표적의 이동경로를 설정할 수 있다. 상단의 메뉴에서 시뮬레이션을 진행할 모드를 선택할 수 있으며, 환경 편 집부분에서는 해양 환경 편집기로 수심이나 음속 등을 설정할 수 있다.
함정 모델 편집기에서는 모델링된 소노부이와 표적 함 정을 선택하여 시나리오 편집기에 초기 위치를 설정할 수 있다. 또한 앞서 언급된 표적신호 합성에 따라 새로운 함정을 만들거나 기존의 함정을 수정하여 표적신호의 특 성을 설정할 수 있으며, 미리 설정된 소노부이 모델을 선 택할 수 있다. 각 함정 모델은 그림 22와 같이 함정모델 설정 창을 통해서 세부적인 내용을 설정할 수 있다. 함정 속도에 따른 광대역 신호의 레벨을 설정할 수 있으며, 함 정이 가지고 있는 토널 성분을 각 그룹별로 설정할 수 있 다. 각 그룹은 기본주파수 및 완더 모델을 지정할 수 있 으며, 그룹에 속한 하모닉 주파수 성분들은 속도에 따른 레벨과 선폭 등을 지정할 수 있다.
Fig. 21. Scenario Editor
Fig. 22. Ship Modeling Window
4.2 시뮬레이터 실행 결과
시나리오 편집기에서 설정한 시나리오는 실행버튼으 로 실행되며, 그림 23과 같이 시뮬레이션 진행 창으로 실행 과정을 볼 수 있다. 시뮬레이션 진행 창에는 현재 시뮬레이션 되고 있는 시간을 실시간으로 표시하며, 실 제 시간과의 차이를 표시한다. 표적 함정은 시나리오 편 집기에서 설정한 기동 시나리오를 따라 기동하며 실시 간 좌표로 표시한다. 개별 소노부이는 실시간으로 표적 의 방위각을 탐지하며, 시뮬레이션 진행 창에 실시간으 로 제공한다. 다중 소노부이일 경우 각 소노부이 추정결 과들을 융합하고, 그 결과를 시뮬레이션 진행 창에 동시 에 제공한다.
Fig. 23. Sonobuoy Simulation Window
시나리오가 실행되는 동안 시뮬레이션 진행 창과 동시 에 DIFAR 처리 결과를 그림 24와 같이 나타낸다. 그림 24의 중간 부분에 튜브 모양의 방위각은 각 소노부이가 실시간으로 탐지하고 있는 표적의 방위각을 나타내며, 그 림 24의 우측 부분은 DIFAR 처리 결과를 나타낸다.
LOFAR 화면에서 각 토널 성분에 해당하는 협대역 방위 각을 색으로 구분하여 표현한다.
시뮬레이션이 진행되는 동안 탐지 및 추적 결과들은 실시간으로 운용자에게 제공된다. 또한 전체적인 탐지 및 추적 결과들은 DB에 저장하여 시뮬레이션 완료 후 사후 정밀분석이 가능하게 설계하였다.
따라서 구현된 시뮬레이터를 사용하여 실제 군사 작전 을 운용하는 부서에서 다양한 배치 결과에 대한 탐지 및 추적 성능을 평가함으로써 실제 운용시 가장 효과적인 배치 방법을 판단할 수 있을 것이다.
Fig. 24. Processing Result Window of DIFAR Processing
5. 결론
다중 소노부이를 이용한 표적 탐지 및 추적 기법에서 는 다중 소노부이의 배치 구조에 따라 그 성능은 서로 달 라진다. 따라서 P-3 초계기를 이용한 전투체계에서 최적 의 소노부이 배치를 위한 전술개발은 군사적으로 매우 중요한 문제이다. 그러나 실제 해상시험데이터를 통해 각 소노부이의 배치에 따른 성능을 검증하는 것은 시간 및 비용의 문제로 현실적으로 불가능하다.
본 논문에서 개발한 신호합성기 및 성능 검증용 시뮬 레이터는 실제 해상시험을 수행하지 않고서도 실제 해양 환경과 유사한 소노부이 신호를 합성할 수 있기 때문에 운영자가 다중 소노부이 배치를 간편하게 설정함으로써 비용 부담없이 빠른 시간 내에 소노부이 배치에 따른 표
적 탐지 및 추적 성능을 검증할 수 있다. 따라서 개발한 신호합성기 및 시뮬레이터는 P-3 초계기를 이용한 전투 체계의 전술 개발에 유용한 도구로 사용될 수 있을 것이다.
개발된 시뮬레이터는 신호발생기를 통해 생성된 가상 의 시험데이터에서는 견실한 성능을 보였지만, 실제 해상 시험데이터에 대해서도 견실한 성능을 검증해야만 한다. 따라서 향후 실제 해상시험 데이터가 확보하여 매개변수 튜닝 등 추가적인 보완작업을 수행할 계획이다.
References
[1] R. I. Mason, “Sonobuoys-part II after WW II,”
AESS Newsletter, pp. 1-7, Oct. 1984.
[2] J. H. Nho et al., DIFAR System (Preliminary Study), Agency for Defense Development, 1981.
[3] D. H. Dini and D. P. Mandic, “An Enhanced Bearing Estimation Technique for DIFAR Sonobuoy Underwater Target Tracking,” 2012.
[4] 이균경, 박상배, 이수형, “TASS 운용성능 향상연구 - 1. 표적 특징 추정정보 처리에 의한 추적성능 향상 기법,” 연구보고서, 국방과학연구소, 1998.
[5] 장덕홍, 박홍배, 정문섭, 김인수, “DIFAR 빔형성 알 고리즘을 이용한 음향신호의 방향성 추정,” 군사과학 기술학회지제5권 제2호, pp. 169-184, 2002.
[6] 김정화 외, “DIFAR Sonobuoy의 시간영역에서의 음 원방향 추정,” 한국음향학회 학술발표대회 논문집 제 21권 제1호, pp. 241-244, 2002.
[7] 이균경, “Hydrophone 출력신호분석 장비 및 Software 개발,” 연구보고서, ㈜배가텍, 2008
[8] Ferrel G. Stremler, Introduction to Communication Systems, 3rd Edition, Addison Wesley, 1990.
[9] Yaakov Bar-Shalom, Multitarget-Multisensor Tracking, Artech House.
[10] Y. T. Chan and F. L. Jardine, “Target Localization and Tracking From Doppler-Shift Measurements,”
IEEE J. Oceanic Eng., vol.15, No.3, pp.251-257, July 1990.
[11] C. Y. Chong, K. C. Chang, and S. Mori, “Distributed tracking in distributed sensor networks,” Proceesings of the American control conference, Seattle, 1986.
[12] Liu Yang, Liu Xiuju, Jin Huixia, Fu Yuanyuan &
Zhang Chi, “Multi-sensing based target tracking by using decision-making strategy with spatial and temporal properties,” EURASIP Journal on Wireless Communications and Networking, 2019.
[13] P. Shar and X. R. Li, “Some Considerations of Submarine Sensor Fusion,” Proc. of 1998 International Conference on Information Fusion (FUSION'98), vol. II, Las Vegas, Nevada. July 1998.
[14] 이수형, 박상배, “다중소나 표적 추적정보 관리기법 연구,” 연구보고서, 국방과학연구소, 2013. 12 [15] Vaghefi, Reza M., Mohammad Reza Gholami, and
Erik G. Ström. “Bearing-only target localization with uncertainties in observer position.” Personal, Indoor and Mobile Radio Communications Workshops (PIMRC Workshops), 2010 IEEE 21st International Symposium on. IEEE, 2010.
[16] D.A. Abraham, A.P. Lyons, “Simulation of Non- Rayleigh Reverberation and Clutter”, IEEE J.
Oceanic Eng., vol.29, No.2, pp.347-362, April 2004.
[17] Richard O. Nielsen, Sonar Signal Processing, Artech House, 1991.
[18] Robert J. Urick, Principles of underwater sound, 3rd edition, Peninsula Publishing, 1983.
이 수 형 (ORCID : https://orcid.org/0000-0002-6729-1039 / [email protected]) 1994 경북대학교 전자공학과 공학사
1996 경북대학교 전자공학과 공학석사 2001 경북대학교 전자공학과 공학박사 2005~ 현재 위덕대학교 에너지전기공학부 교수
관심분야 : 수중음향 신호처리, 수중음향 모델링 및 신호 합성, 탐지, 추적, 식별, 시뮬레이션
박 상 배 (ORCID : https://orcid.org/0000-0002-6208-7506 / [email protected]) 1986 경북대학교 전자공학과 공학사
1989 경북대학교 전자공학과 공학석사 1994 경북대학교 전자공학과 공학박사 1995~1997 동양대학교 전임강사
1997~ 현재 위덕대학교 에너지전기공학부 교수 관심분야 : 수중음향 신호처리, 탐지, 추적 및 식별
한 상 규 (ORCID : https://orcid.org/0000-0002-4427-7349 / [email protected]) 1988 한양대학교 지구해양과학과 학사
1990 한양대학교 지구해양과학과 석사 1997 한양대학교 지구해양과학과 박사 1997~1998 수중음향특화연구센터 연구원
1999~2000 Coastal Ocean Acoustic Lab., Naval Postgraduate School, USA, Visiting Research Investigator
2001~2013 STX엔진 전자통신연구소 수석연구원 2013~2016 대우조선해양 특수성능연구소 부장 2016~ 현재 한화시스템 해양연구소 수석연구원
관심분야 : 수중음향 신호처리, 수중음향 모델링, 능/수동 소나, 소노부이
권 범 수 (ORCID : https://orcid.org/0000-0001-7235-5669 / [email protected]) 2004 경북대하교 전자전기공학부 학사
2006 경북대학교 전자공학과 석사 2011 경북대학교 전자공학과 박사
2011~ 현재 한화시스템 해양연구소 수석연구원
관심분야 : 수중음향 신호처리, 수중음향 모델링, 능/수동 소나, 소노부이