A Control Algorithm of Linear Induction Motor based on Indirect Vector Control
이재현 1 전미림 2 목형수 3 이진우 4 김상훈 4 김철호 5 정은성 6
Lee Jae-Hyun, Jeon Mi-Rim, Mok Hyung-Soo, Lee Jin-Woo, Kim Sang-Hoon, Kim Chul-Ho, Chung Eun-Sung
---
ABSTRACT
This paper presents a vector control of Linear Induction Motor base on a slip frequency control. And a linear induction motor modeling included the end effect using circuit and equation method is also proposed. We demonstrated through simulation the improvements achieved by the proposed scheme.
---
1. 서 론
† 책임저자 : 비회원, 건국대학교 전기공학과 박사과정 E-mail : [email protected]
TEL : (02)444-4701 FAX : (02)447-9186 1 비회원, 건국대학교 전기공학과 박사과정 2 비회원, 건국대학교 전기공학과 석사과정 3 비회원, 건국대학교 전기공학과 교수 4 비회원, 두원공과대학교 메카트로닉스과 교수 5 비회원, 강원대학교 전기 전자공학부 교수
6 비회원, 현대로템주식회사 기술연구소 전장품개발팀 수석연구원 7 비회원, 현대로템주식회사 기술연구소 전장품개발팀 선임연구원
2. 본 문
2.1 선형유도전동기의 모델링
선형유도전동기는 다양한 비선형적 특성들로 인해 회전형 유도전동기와 비교하여 선형유 도전동기의 정확한 수학적 모델을 도출 하기는 매우 어렵다. 본 논문에서 단부효과를 고려 한 선형유도전동기 모델을 사용하였다.
선형 유도전동기의 동적 모델은 단부 효과를 고려한 전기적인 d-q 등가 회로 모델을 사용하였다.[4][5]
(a) d축 등가회로
(b) q축 등가회로
그림1. 단부효과를 고려한 LIM의 등가회로 모델
그림 1. (a)에서와 같이 d축 magnetization branch가 회전형 전동기와 차이가 있는 반 면, 그림 1.(b)서는 q축 등가회로는 일반적인 회전형 전동기와 일치함을 나타낸다.
그림 1. 로부터 동기 좌표계(subscript “e")에서의 1차측과 2차측 전압 방정식을 정리하 면 다음과 같다.
(1)
(2)
(3)
(4)
쇄교자속에 관한 수식은 다음과 같다.
(5)
(6)
(7)
(8)
(9)
(10)
추진력에 관한 수식은 다음과 같다. (11)
여기서, 는 1차측 전압, 은 2차측 전압, 은 1 차측 인덕턴스 , 은 2차측 인덕턴스, 는 1차측 누설 인덕턴스, 은 2차 측 누설 인덕턴스, 은 자화 인덕턴스, 첨자 “ "와” "은 각각 1차측과 2차측을 나타낸 다. , 은 1차측 전압, , 은 각각 2차측 전압, , 는 각각 1차측 전류, , 은 각각 2차측 전류, , 은 각각 1차측과 2차측 쇄교자속을 나타 낸다. 또한 , 은 각각 1차측과 2차측 저항, 은 2차측 주파수, 은 극수, 는 수학 적 미분 연산자, 는 2차측 속도, 는 극간격, 는 1차측 길이( ), 는 1차측 길이 와 관련한 요소로 속도의 함수이며 단부효과의 수치를 계산할 수 있게 한다.
그림 2.에서는 Ansoft 사의 Simplorer를 이용하여 회로와 수식을 혼합한 모델을 나타내
었다.
Lls Rs
Lm*(1-FQ)
Llr -Wr*Lamqrs Rr
Vdss
Rs Lls
Lm
Llr Wr*Lamdrs Rr
Vqss
EQU
10
Rs
10
Lls
10
Llr
10
Lm
10
Wr
10
Iqss
10
Idss
Iqrs
10Idrs
1010
Ls
10
Lr
Lamdss:=Lls*Idss+Lm*(1-FQ)*(Idss+Idrs);
Lamqss:=Ls*Iqss+Lm*Iqrs;
Lamdrs:=Llr*Idrs+Lm*(1-FQ)*(Idss+Idrs);
Lamqrs:=Lr*Iqrs+Lm*Iqss;
Lamars:=Lamdrs;
Lambrs:=-1/2*Lamdrs+sqrt(3)/2*Lamqrs;
Lamcrs:=-1/2*Lamdrs-sqrt(3)/2*Lamqrs;
Lamass:=Lamdss;
Lambss:=-1/2*Lamdss+sqrt(3)/2*Lamqss;
Lamcss:=-1/2*Lamdss-sqrt(3)/2*Lamqss;
Theta_real:=atan2(Lamdrs,Lamqrs);
Te:=3/2*P/2*Lm*(Iqss*Idrs-Idss*Iqrs);
Force:=2.*pi/Tau/P*Te
10
P
10
Te
10Lamdss
10
Lamqss
10
Lamqrs
10
Lamdrs
CONST
CONST
CONST
CONST
CONST 10
Vas
10
Vbs
10
Vcs
EQU
Vdss:=(2*Vas-Vbs-Vcs)/3;
Vqss:=(Vbs-Vcs)/sqrt(3.);
Ias:=Idss;
Ibs:=-1/2*Idss+sqrt(3)/2*Iqss;
Ics:=-1/2*Idss-sqrt(3)/2*Iqss
10
Vqss
10
Vdss
CONST
CONST
10
Ias
10
Ibs
10
Ics
CONST
CONST
CONST 10
Rr
Flux_Rotor
10
Lamdre_real
CONST 10
Theta_real
CONST
Flux_Stator
10
Lamdse_real Lamqse_real
10CONST
CONST
Current_Stator
EQUBL GAIN
GAIN
GA IN
Rr*Lm/Lr
1/(2*pi)
1/(2*pi)
CONST
Current_Stator.fqse
CONST
Flux_Rotor.fdse
Wsl_real
1010
Fsl_real
10
Fe_real
10
Force
CONST 10
Tau
EQU
CONST
Irms:=sqrt(Idss^2+Iqss^2)/sqrt(2.)
10Irms Rr*FQ
EQU
End_Effect Q:=D*Rr/((Llr+Lm)*velocity+1.e-10);
FQ:=(1-exp(-Q))/Q
10
velocity
10
D
10
Q
CONST
FQ
10 CONST그림 2. 회로와 수식을 이용한 LIM 모델
10
WrmGAIN
GAIN 10
Wrpm2*pi/Tau/P
60/2/pi
GAIN
P/2
I
1
10
Theta P
10
10
WrCOSINE
EQUBL
SINE
F_TR1 F MASS_TR1 Force
10
Mass
10
CONST
Tau
10
10
Velocity
GAIN
3.6
10
km_per_hour그림 3. 기계 부하 시스템 모델
그림 3.에서는 Mass모델을 이용한 기계 부하 시스템 모델을 나타내었다. 회전형 전동기 와는 달리 횡방향으로 이동하는 부하의 특성을 고려하여 Force를 입력으로 하는 Mass모 델을 선정하고 각 부분의 결과 출력을 위한 수식을 이용하여 모델링을 수행하였다.
그림 2.와 그림 3.에서의 혼합 모델은 전기, 기계, 자기와 같이 각각 다른 물리적 영역의 모델을 하나의 Schematic 내부에서 구현이 가능한 장점을 가진다.
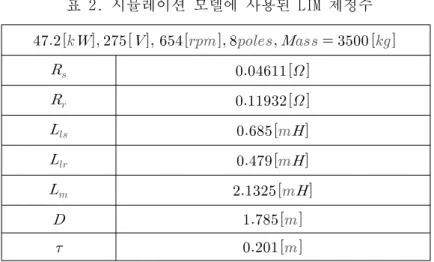
표 2.에서는 모델링에 사용된 제정수를 나타내었다. 사용된 제정수는 FEM 해석을 수행
에 의한 계산 수치이며 기저 속도 45 km/h, 43.6Hz, 275V,에서 계산되었다.
표 2. 시뮬레이션 모델에 사용된 LIM 제정수
또한, 슬립주파수의 관계식은 자속이 일정할 경우 식 (12)와 같이 표현된다.
(12)
2.2 간접 벡터 개념에 근거한 선형유도전동기 제어 알고리즘
그림 4.에서는 간접 벡터 제어 전체 블록 다이어그램을 나타내었다.
그림 4. 간접 벡터 제어 전제 블록 다이어그램
본 논문에서는 기본적으로 널리 알려진 전류 모델을 이용한 자속 추정방법을 이용한 간
접벡터 제어 기법을 사용하였다. 전류제어는 역기전력을 전향 보상한 동기 좌표계 PI전류
제어기를 사용하였으며, 전압 변조방식으로는 과변조를 포함한 SVPWM을 사용하였다.
또한 수직력에 영향을 최소화 하기위해 슬립주파수를 일정하게 하는 전류 지령 계산기를 추가 하였다.
그림 5.에서는 그림 4.의 블록 다이어그램을 이용하여 수행한 모델링을 나타내었다.
ICA: ICA: ICA: ICA:
ICA: ICA:
ICA:
ICA:
Motor_Parameters P:=8;
Rs:= 0.04611;
Rr:=0.11932;
Lls:=0.685e-3;
Llr:=0.479e-3;
Lm:=2.1325e-3;
Ls:=Lls+Lm;
Lr:=Llr+Lm;
Lsigma:=Ls-Lm^2/Lr;
Tr:=Lr/Rr
Motor_Rating P_rate:=47200;
Wrpm_rate:= 654;
Wrate:=Wrpm_rate*2*pi/60;
I_rms_rate:=330;
Ismax:=I_rms_rate*sqrt(2.);
Lamdref:=0.433/3;
Te_rate:=P_rate/Wrate;
Idse_rate:=Lamdref/Lm;
Idseref:=Idse_rate;
Idse_max:=Idse_rate;
Te_max:=Te_rate;
Iqse_rate:=sqrt(Ismax^2-Idseref^2);
Iqse_max:=Iqse_rate;
kt:=3/2*P/2*Lm/Lr*Lamdref;
kt_pre:=3/2*P/2*Lm/Lr
Current_Controller_Parameters fcc:=100;
Wc:=2*pi*fcc;
Kp:=Lsigma*Wc;
Ki:=Rs*Wc;
Ka:=1.2/Kp
Flux_Observer_Parameters Wmc:=200;
K1:=sqrt(2.)*Wmc*Lr/Lm;
K2:=Wmc*Wmc*Lm/Lr
Flux_Controller_Parameters fwc:=31.8;
Wfc:=2*pi*fwc;
Fkp:=((Lr/Rr)/Lm)*Wfc;
Fki:=(1/Lm)*Wfc;
Fka:=1/Fkp
Contrtol_Parameter fs:=900;
Tsw:=200u;
Tcc:=250u;
Tsc:=1m;
Tsf:=1m;
Theta_flag:=1 System_Parameter
Vdc:=375
LIM_Control_Parameter Notch_cmd:=4;
F_sl_ref:=12.5;
Wsl_ref:=F_sl_ref*2*pi;
Fe_max:=100
F_sl_ref Irms Current_ref
fqse fdse Feed_Forward Reference
Feed_Forward Reference
Force Transformation
Current_Cal Flux_Observer Feedforward_compensation
PI_id
PI_iq
Mecha_Load_LIM
CONST
CONST CONST
CONST CONST
Command_Cal
Slip_Cal GSI
Notch_cmd BK_cmd
Powering_flag Braking_flag
GAIN
Vcs Vbs Vas
IM_with_end_effect
ICA:
Mechanical_Parameters Tau:=0.201;
D:=1.785;
Mass:=3500/35/3
Vcs_ref Vbs_ref Vas_ref SVM_with_OVM_INVERTER
그림 5. 본 논문에 사용된 전체 시뮬레이션 모델
본 논문에서는 슬립주파수가 일정하게 유지되어야하는 철도차량 추진 시스템 조건하에서 d,q축 전류 지령을 슬립주파수가 일정하게 유지되기 위한 그림 6.에서 나타낸 별도의 계산 알고리즘을 사용하였다.
Rr 10
Lr 10
Irms 10
10
F_sl_ref
GAIN
2*pi
10 Wsl_ref
EQUBL
EQUBL
10 Idse_ref
10 Iqse_ref
10
Tsamp
VAL[0] :=sqrt(2/(1+INPUT[1]^2))*INPUT[0];
VAL[1] :=INPUT[1] *sqrt(2/(1+INPUT[1]^2))*INPUT[0]*sgn(INPUT[2])
GAIN
Wr 10
GAIN1/(2*pi)
EQUBL