*정회원, 동양대학교 공연영상학부 교수 (제1저자) (2006서울국제미디어비엔날레 참여작가)
접수일: 2019년 10월 05일, 수정완료일: 2019년 10월 26일 게재확정일: 2019년 11월 03일
Received: October 05, 2019 / Revised: October 26, 2019 Accepted: November 03, 2019
*Corresponding Author: [email protected]
Dept. of Performing and Media arts, DongYang Univ, Korea
테오얀센의 자율적 기계 생명체와 다리 메커니즘
Theo Jansen's Autonomous Mechanical Life and Leg Mechanism
김태은 Kim, Tae-Eun
요 약 기계가 움직일 때의 동작들은 일정한 원리에 의해 움직이기 때문에 아무리 복잡하고 다양한 기계라 할지라도 기계의 운동을 지배하는 근원적 원리가 있다. 자율적 움직임은 반복을 피할 수 있고, 더 인간적이며 더 자연적인 요 소에 근접하는 길이다. 복제가 아닌 독창적인 움직임은 더더욱 그러하다. 따라서 현재, 기계의 역동성은 인간의 참여 에 의해 더욱 다감각적으로 표현될 수 있는 가능성에 도전하고 있으며 사실과 복제의 경계에서 그 표현영역을 점점 확대시키고 있다. 테오얀센의 작품들은 각각의 시기별로 다른 환경에 적응토록 변화하여 그의 수십 년에 걸친 연구는 초기에서 현재까지 계속 진화되고 있음을 알 수 있다. 그 진화의 초점은 무엇보다 개체를 구성하는 부품들 간의 유기 적 결합이 가진 원리로부터 반복되는 원형운동과 수평적 왕복운동이라는 동일한 근원지를 가지고 있음을 알 수 있다.
주요어 : 테오얀센, 메커니즘, 다리구조, 기계 생명체, 행동패턴, 기계예술
Abstract Since the movements of a machine are driven by a certain principle, there is a fundamental principle that governs the movement of the machine, no matter how complex and diverse it may be. Autonomous movements are a way to avoid repetition, to approach more humane and more natural factors. That's all the more so when it comes to original movements, not cloning. So now, the dynamics of the machine are more multi-sensory by human participation. It is challenging the potential to be expressed and is gradually expanding its sphere of expression in the boundaries of fact and cloning. Theo Jansen's works have changed from period to period to adapt to different circumstances, indicating that his decades-long work has continued to evolve from early to present. The evolution's focus, among other things, can be seen as having the same source of circular motion and horizontal reciprocating motion, which are repeated from the principle of organic coupling between the parts that make up the object.
Key words : Theo Jansen, mechanism, leg's structure, mechanical life form, mechanical art
http://dx.doi.org/10.17703/JCCT.2020.6.1.23JCCT 2020-2-4
Ⅰ. 서 론
산업혁명 이후의 서구 예술에 있어 기계는 미래주의, 구성주의, 바우하우스 운동을 거쳐 다다이즘, 초현실주
의를 통해 아름다움과 문명비판의 도구로 활용되어졌
다. 이후 20세기 초 산업과 과학기술에 의해 공간 속
움직임, 시간의 시각적 표현 등으로 구체화 되었으며
기술정보시대에 들어선 지금, 컴퓨터와 센서기술의 발
상상력을 구현해 나아가고 있다. 하지만 어떤 기계든지 움직일 때의 동작들은 일정한 원리에 의해 움직이기 때 문에 아무리 복잡하고 다양한 기계라 할지라도 기계의 운동을 지배하는 원리를 이해할 수 있다. 또 그 원리가 관념과 개념으로 설명되어질 수 있다면, 우린 그 속에 서 예술적 가치를 발견할 수 있을 것이다.
마리네티(F.T.Marinetti)는 1909년 기계의 역동성과 속도의 아름다움을 [미래주의 선언]을 통해 표현하였고, 미래주의 화가 프랑폴리(E. Pranpolini)는 1922년 [기계 의 미학과 예술에 있어서의 기계적 성찰]이라는 글에서
‘기계의 미학적인 미덕, 그 움직임의 형이상학적인 의미 와 메커니즘은 현대 조형예술의 개혁에 영감을 주는 신 기원이 된다’라며 산업사회에서의 기계와 기계적 표현 욕구, 기계미학의 필요성에 대해 역설하였다. [1]
이 당시의 기계는 사실, 기어장치, 지렛대의 원리, 나 사의 원리 등 아주 기본적인 원형에 가까운 기계라 할 수 있으며 당시의 ‘현대‘라는 표현은 지금으로 따지자면 어느 정도 많은 시차가 있다. 오늘날의 기계는 당시와 비교해 보면 기계 그 이상의 것을 의미하고 있다. 인간 과 조화를 이루는 하나의 생명체나 인간의 모습 그 자 체가 투영된 하나의 반사체로써의 기계로 그 가치와 척 도는 더 중요하다고 볼 수 있다.
테오얀센(Theo Jansen)은 물리학자에서 출발하였다.
따라서 그의 창작물 속에 숨겨진 동작원리는 그의 세계 관을 이해하는데 중요하다. 1990년부터 20년간 만들어 온 해변동물(strandbeest)을 살펴보면 스스로 걷는 것에 서 시작하여, 환경을 인식하여 생존하는 것에 다다르는 진화과정을 엿 볼 수 있다.[2] 그의 작품 속에 주동력이 자연적 요소들임을 감안할 때, 인공적 기계에서 좀 더 생명체에 근접하려는 의도를 엿 볼 수 있다. 얀센의 메 커니즘을 살펴봄으로 해서 우리는 기계가 생명체를 어 떻게 모방하려하는지, 그리고 움직임의 미학적 가능성 은 어떠한 것이 있을지에 대해 도달할 수 있을 것이다.
Ⅱ. 인공 생명체로써의 기계
1. 인공생명체로써의 기계
우리는 흔히 누군가의 조정을 받지 않고 스스로 움 직이는 물체들에 대해 ‘인공생명‘ 혹은 ’자율적 생명체
웨어에 의하면 그 안의 개체들은 여럿이 모여 하나를 이루고 그 중에 우수한 것만 선택 진화 하며, 단순한 모방과 달리 창의적으로 행동한다.
테오얀센의 해변동물(strandbeest)시리즈는 누군가 밀어주지 않으며, 먹이를 주며 사육하는 것이 필요 없 다. 즉, 에너지를 소비하지 않기 때문에 먹는 과정이 필 요치 않으며, 바람에 의해 스스로 움직이는 관절을 갖 추었다. 해변가에 부는 바람과 수분 등은 이 해변동물 들 살아가는데 필요한 요소로서 작용한다. 이 점은 얀 센의 기계가 자율성을 가진 생명체라는 것을 입증해주 고 있다. 전기동력이 아니라 자연동력에 의존하여 움직 이는 작품으로는 무엇보다 알렉산터 칼더(Alexander Strirling Calder)의 모빌작품들과 키네틱 장치로써는 장 탱글리(Jean Tinguely)의 아쌍블라쥬 기계작품들을 빼 놓을 수 없다. 움직이는 조각으로써 칼더와 탱글리 는 미술관이나 건축물 내부공간을 중심으로 한 전시작 품이라고 한다면 얀센의 작품들은 외부환경에 노출되 어 있어 마치 ‘살아간다‘라고 하는 개념에서 서로 비교 할 수 있다.
이외에도 스스로 움직이는 생명체를 모방한 기계들 에 대해 몇 가지 예를 살펴보면, 독일의 생체로봇 회사 Festo에서 제작한 <Air Jelly>[3]시리즈가 있다. 이것은 물이 없는 공간에서 물속을 헤엄치듯 다니는 해파리와 같은 모양을 하고 있다. <Air Jelly>가 스스로 공기 중 을 헤엄치고 다니는 모습은 자율적이다. 사실 이 물체 는 리튬이온 배터리가 들어가 있어, 전기모터를 움직이 며 헬륨가스가 몸체 안에 들어있다. 모터로 움직이는 다리들은 땅을 박차고 노를 저어 공기를 자신의 몸을 부양시키는데 사용하고 있다. <Air Jelly>의 비행능력 은 단순하지만 물이 아닌 공기 속에서 이루어지며 모터 와 관절의 장치가 정교하여 움직임이 자연스러워 자연 의 일부를 보는 착각을 불러일으킨다. <Air Jelly>는 관절을 움직이는 동력을 베터리에서 얻는 다는 것이 얀 센의 해변동물과 큰 차이가 있다. 이 동력은 비(非)자연 적인 것이라기보다 덜 자연적인 것이라고 표현하는 것 이 적합하다.
생명체에서 그 기본적인 원리를 연구하여 인공기계
로 만드는 기술은 날로 정교해져 로봇의 역사 속에 진
화를 거듭하여 소개되어져 왔다. 이처럼 자율적으로 움
직이는 물체들은 스스로 판단하고 스마트한 것으로 받
제작
년도 내용 작품명
1990
stick insect 의 진화과정에 모티브를 가져옴 단순형태와 운동, 최소한의 기능
플라스틱 관과 접착테입으로 이어진 다리
Animaris Vulgaris
1990~
1993
플라스틱관의 케이블 타이로 연결됨
삼각형의 면구성으로 플라스틱관을 지탱함 축을 이용하여 걷기 시작
Animaris Currens Vulagaris
1993~
1994
플라스틱관을 열을 통해 구부려짐이 가능 유연한 뼈대가 가능 바람과 축을 같이 사용하여 걷는
것이 가능
Animaris Currens Ventosa Animaris Sabulosa Adolescens
Animaris Sabulosa Adolescens
1994~
1997
유전자(플라스틱관모듈)을 통해 번식,
아니마리스 제네티쿠스(Animaris Geneticus)속에 모듈로 들어있는 여러개의 유전자가 교체가능하고 일부를 떼어내어 다음 세대로 이어지게 하는 유전자 역할을 함
Animaris Geneticus
1997~
2001
해변동물의 플라스틱관이 나무로 변환되면서 스케일이 커짐 2.5톤에 다다르는 거대한 물체로
변환됨. 사람이 탑승 가능
Animaris Rhinococeros
Transport
2001~
2006
바람에 의존하던 단계에서 스스로 근육을 움직이는
기능으로 발전 플라스틱관과 관 사이를 연결하는 피스톤 운동으로
근육이 활성화 된다.
해변에서의 생존가능성이 향상됨
Animaris Vermiculus
Animaris Rugisus Peristhaltis
Animaris Vaporis
2006~
현재
컴퓨터 소프트웨어의 시뮬레이션으로 더욱 정교해지고
센서의 기능추가로 인해 주변위험요소들을 인식 스스로 방어하는 뇌를 갖추기
시작함
Animaris Percipiere Rectus Animaris Excetsus Animaris Ordis
Animaris Modularius
아들여지기 때문에 우린 이러한 기계장치들이 정교해 질수록 그 표현이 실제에 가깝다고 느껴지기 마련이다.
생명체는 아니지만 ‘생명체와 같은‘ 존재감으로 인해 기 계는 우리와 더 가깝고 동일시되는 과정 속에 들어와 있다. 기계의 움직임은 매우 반복적인 것이 특징이다.
움직임이 주기적으로 반복되면 아무리 겉 표면이 사람 같아도 기계임을 즉각 알아차리게 된다. 실제 생명체와 인공생명체의 차이점은 이러한 패턴을 얼마만큼 알아 차릴 수 있느냐의 여부에 따라 달라진다고 할 수 있다.
자율적 움직임은 반복을 피할 수 있고, 더 인간적이며 더 자연적인 요소에 근접하는 길이다. 복제가 아닌 독 창적인 움직임은 더더욱 그러하다. 따라서 현재, 기계의 역동성은 인간의 참여에 의해 더욱 다감각적으로 표현 될 수 있는 가능성에 도전하고 있으며 사실과 복제의 경계에서 그 표현영역을 점점 확대시키고 있다.
이탈리아, 스위스, 벨기에 3국이 참여한 swarm-bots 프로젝트[4]에 의하면 여러 대의 로봇들이 각자 흩어져 서 정보를 탐색하여 움직이다 장애물이 발견되면 하나 로 이어져 장애물을 피해가거나 건너가는 행동패턴들 을 수행한다. 이러한 연구들은 로봇이 어떠한 생명체를 모방하여 새로운 생명체를 창조해 나가는 인공생명체 로서의 가능성을 시사한다. 이러한 예들을 미루어 볼 때, 테오얀센의 20년간 제작된 해변동물(strandbeest)시 리즈는 좀 더 자연에 가까우며 생태학적 환경 속에서 인간과 함께 살아갈 수 있는 기능들을 점점 갖추며 진 화하고 있다는 측면에서 인공생명체로써의 의미가 크 다고 하겠다.
이처럼 인공생명체라고 지칭하는 것들의 특징은 어 떠한 순간에서는 예고된 알고리즘의 순서에서 벗어나 의외의 상황에 스스로 판단하고 대처하는 것을 나타내 고 있음을 알 수 있다. 테오얀센의 해변동물 역시 20여 년의 기간을 통해 정교해지고 인지능력을 갖추기 시작 한 단계까지 변화하고 있다. 테오얀센의 해변동물은 단 순한 운동만 하는 존재에서 스스로 생존을 위한 방어를 하는 뇌기능을 가진 기계생명체로 거듭나기까지는 몇 차례의 진화과정을 거친다.
아래 표는 이것을 연대기 순으로 정리한 것이다.
표 1. 해변동물(strandbeest) 제작과정과 연대기별 작품명
Ⅲ. 해변동물(strandbeest)들의 메커니즘
얀센의 해변동물(strandbeest)시리즈에서 공통적으 로 발견되는 점은 외부로부터 에너지를 가져와 스스로 동력을 발생시키는 튜브장치와 그 동력이 움직임을 발 생시키는 다리구조시스템이다. 외부에너지는 주로 바람 이 이용되며, 유입된 바람이 일정한 과정을 거쳐 다리 를 움직여 이동하게 한다. 이것을 크게 풍력저장장치와 다리시스템으로 나누어 살펴보도록 하겠다.
1. 풍력저장장치
20년 동안 진화된 얀센의 동물들은 바람, 물 등의 자 연적 요소에서 움직임의 동력을 가져온다는 것이 가장 큰 특징이라 할 수 있다. 얀센의 해변동물(strandbeest) 시리즈는 그가 해변가에 작업실을 두고 대부분이 해변 근처에서 제작된 작업들이다. 해변을 스스로 걷는 타입 으로 뇌의 기능과 유사한 기능을 가졌다고 평가받고 있 으며 스스로 유지와 방어가 가능한 기능을 보유하고 있 다. ‘아니마리스 사불로사 아돌레센스(Animaris Sabulosa Adolescens)[5] 작품 같은 경우는 꼬리에 삽이 달여 있어 모래언덕을 쌓을 수 있고, 변속장치 기능이 있어 건조한 모래를 속도조절을 통해 걸을 수 있다. 또한 추진날개 와 센서날개가 달려 있어 자신의 위치를 판별하고, 건 조한 모래와 폭풍우에 자신을 보호하는 능력을 갖추고 있다.
‘아니마리스 베르미쿨루스(Animaris Vermiculus)’ [6]
라는 작품은 28개의 플라스틱 물병이 바람을 저장하는 역할을 하게끔 고안되어 있다. 바람이 불면 움직이는데 움직이는 힘을 전달하는 근육은 플라스틱관(튜브)에 피 스톤이 들어갈 때 늘어난다. 피스톤에 의해 들어간 공 기는 관을 감싸고 있는 캡슐 안을 채운 다음 그 다음 근육으로 이동하여 움직임을 활성화시킨다.
그림 1. 아니마리스 사불로사 아돌레센스(좌), 아니마리스 베르 미쿨루스(우)
Figure 1. Animaris Sabulosa Adolescens (left), Animaris Vermiculus(right)
같다. 이것의 구성은 공기를 담은 재활용된 플라스틱 병 에 있는데 바람이 불면 이 장치가 높은 압력을 펌프질할 수 있어 이 작품의 주된 동력인 바람을 유지시킨다. 이 러한 장치의 기술은 자전거펌프에 널리 사용되고 있다.
이 동물에 부착된 수많은 펌프 장치들은 불어오는 바람 을 통해 날개들을 움직인다. 이 과정에는 시간이 다소 걸리지만 그 동안에 용기 안에 바람은 마치 베터리 처럼 충전된다. 그 장치들은 바람을 공급하기도 하고 플라스 틱 용기 안에 저장한다. 용기의 뚜껑이 열리면 병에서 나오는 바람은 높은 속도로 뿜어져 나온다. 이 장치는 불규칙하게 마구 불어대는 바람일지라도 이 장치를 통 해 일종의 '제어'가 가능하고 일정한 동력을 제공해주어 동물을 움직이게 하는 셈이다. 바람만 가지고는 불가능 하다. 동물이 움직이기 위해서는 근육과도 같은 역할을 해주는 것이 필요하다. 다리를 움직이는 근육의 역할은 튜브관을 통해 이루어진다. 이 튜브관들은 서로 얽혀 있 어 하나가 움직이면 다른 위치의 것들도 연동해서 움직 이게 구성되어 있다. 시작되는 움직임은 끝나는 움직임 이 있어 그것들이 node처럼 맞물린 구조로 인해 서로 움 직임을 전달해준다.
그림 2. 플라스틱 튜브관과 매듭 [7]
Figure 2. plastic tube and knot
이것은 마치 우리의 신경(뉴런)구조가 정보를 주고 다음 신경에 전달해주는 시냅스의 신호전달체계와 유 사하다. 튜브에는 끝부분에 고무링(고무 고리)가 달려 있어 피스톤의 역할을 해 준다. 즉, 바람이 용기를 통해 작은 튜브파이프로 들어가고 이것이 외부피스톤을 밀 게 되고 근육이 늘어날 수 있게 하는 것이다. 이 동물 의 근육은 탭과 탭 사이를 연결하여 활동할 수 있게 연 결해 준다. 바람을 저장하여 다시 조절하는 장치에 쓰 이는 것은 플라스틱 용기와 고무관 등이다. 이 장치의 특징은 바로 전기를 사용하지 않는 것이라 할 수 있다.
때문에 바람이 부는 해변가에서 스스로 움직이는 것이
가능하게 됨으로써 마치 스스로 움직이는 생명체와 같 이 보이는 것이다.
2. 다리 시스템(leg system)
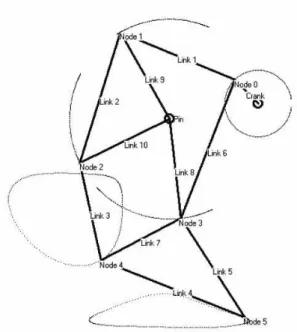
테오얀센의 다리 메커니즘은 1990년대에 고안된 것 으로, 소프트웨어인 "widgets"와 발생학적 알고리즘의 실험과정에서 비롯된 것[8]으로 알려져 있다. 이 장치는 10개의 연결고리들(links)로 구성되어 있으며 각 연결고 리마다 두 개의 추축(pivots)들을 가지고 있다. 얀센의 다리장치는 마치 크랭크축(crankshaft)처럼 척추의 구 조를 하고 있다. 이축이 회전할 때 다리는 움직일 수 있다. 때로 이 핸들에다 바람의 장력을 받는 장치를 통 해 바람의 힘으로 축을 돌리기도 하는 자동방식의 동물 도 있다. 이 축의 회전운동은 11개의 작은 가지들을 걷 는 동작을 하게 만들어 다리 맨 끝에 달린 작은 곡선을 그리게 한다. 이 부분을 얀센은 발(toe)라 부른다. 걷기 시작하면 이 펜슬은 삼각형모양을 가지고 원형의 모양 을 그리며 움직이게 된다. 이 발은 땅을 밀어내면서 동 물을 움직이는 역할을 한다. 마치 바퀴가 수평선 위에 서 움직이듯 이 발도 수평선을 기본으로 하여 궤적을 그리면서 움직인다.
그림 3. 얀센의 메커니즘, 연결과 마디의 구성도
Figure 3. The mechanism of Theo Jansen's node system