서론 I.
, ,
[1,2].
, ( , , )
(reusable building block) ,
[3-6].
.
[3,7].
.
(COTS: Commercial Off-The-Shelf)
.
* (Corresponding Author)
: 2011. 8. 20., : 2011. 9. 5., : 2011. 9. 25.
, :
([email protected]/[email protected])
. ,
. ,
, .
.
, ,
.
. ,
(OPRoS: Open Platform for Robotic Services)
( ) 67%
[8].
.
.
/
Health Monitoring and Efficient Data Management Method for the Robot Software Components
,
*(JongYoung Kim1 and HeeByung Yoon1)
1Korea National Defense University
Abstract: As robotics systems are becoming more complex there is the need to promote component based robot development, where systems can be constructed as the composition and integration of reusable building block. One of the most important challenges facing component based robot development is safeguarding against software component failures and malfunctions. The health monitoring of the robot software is most fundamental factors not only to manage system at runtime but also to analysis information of software component in design phase of the robot application. And also as a lot of monitoring events are occurred during the execution of the robot software components, a simple data treatment and efficient memory management method is required. In this paper, we propose an efficient events monitoring and data management method by modeling robot software component and monitoring factors based on robot software framework. The monitoring factors, such as component execution runtime exception, Input/Output data, execution time, checkpoint-rollback are deduced and the detail monitoring events are defined. Furthermore, we define event record and monitor record pool suitable for robot software components and propose a efficient data management method. To verify the effectiveness and usefulness of the proposed approach, a monitoring module and user interface has been implemented using OPRoS robot software framework. The proposed monitoring module can be used as monitoring tool to analysis the software components in robot design phase and plugged into self-healing system to monitor the system health status at runtime in robot systems.
Keywords: robot software component, health monitoring technique, component based robot development, self-healing
Copyright© ICROS 2011
.
(runtime exception) [9], (data value) [10], - (checkpoint-rollback),
(time) [11]
.
. ,
WCET [12]
.
- [13] .
VI . II
III
. IV . V
, VI .
관련 연구 II.
/ (ping/echo), (watchdog), (heartbeat), [14]. /
. (reset)
.
.
(SEH: Structured Exception Handling)
, ,
,
SIGXCPU . -
.
Sundmark et al [15] ,
, , (sanity check)
,
/ , ,
.
.
Lüders et al [16] (time-
stamped log message)
, ,
. (proxy)
. (deadline)
. Garlan et al [17]
(probe) (gauge) .
(probe bus) .
. ,
.
Edwards et al [18] - .
- . -
, ,
-
. Mahadevan et al [19]
(air data inertial reference unit)
2 .
,
(data validity) .
.
, -
.
로봇 소프트웨어 컴포넌트 실행 모니터링 방안 III.
로봇 소프트웨어 컴포넌트 모델링 1.
[20]
3 .
OROCOS, OMG RTC, ORCA [21],
, .
[7]
.
.
(1) .
⋯
(1) onExecute().
.
onExecute()
. (, Execution
time)
. (2) .
(2) ()
(3) .
(3)(, Cycle time) .
. () onExecute() ()
(4) .
(4). .
( ~ ) .
,
. (5)
.
≤ ≤ (5) 로봇 소프트웨어 컴포넌트 실행 모니터링 요소
2.
4 .
,
. ,
, - ,
. ,
.
.
, /
. /
.
(queue) / (wrapping)
.
, -
.
. /
(hardware state) -
. Object Marshalling, Object
Serialization
.
. , .
.
(Execution Time, Et), (Execution Cycle Time, Ct),
(Data Input Cycle Time, Di_Ct), (Data
Output Cycle Time, Do_Ct) 4 .
(4) (E_At)
(E_St) .
3. .
Fig. 3. The monitoring factor of components execution time.
1. .
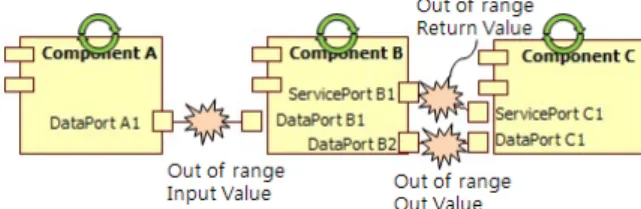
Fig. 1. The monitoring factor of components runtime exceptions.
2. .
Fig. 2. The monitoring factor of components data.
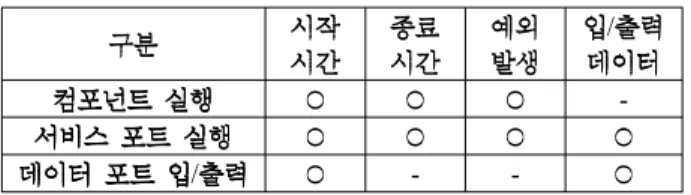
1. (monitor data) . Table 1. The definition of monitor data recode.
/ -
/ - -
컴포넌트 실행 모니터링 데이터 관리방안 3.
.
· CPU,
.
.
.
(RDB)
.
,
/ .
, ,
/ /
.
1 .
1 4
. 3
.
(monitor record pool) .
.
.
.
모니터링 모듈 설계 및 구현 IV.
.
. ,
4 .
컴포넌트 모니터 관리자
1. (component monitor manager)
, /
. onReset(), onStart(), onStop(), onExecute() (callback)
onExecute() .
onExecute() .
onExecute()
, .
onExecute()
.
PortInterface CDL(component development
library) .
4. .
Fig. 4. Execution monitoring module architecture of the robot software components.
InputDataPortInterface pop() OutputDataInterface push()
. CDL
, /
.
RequireServicePort
(wrapping) .
.
, .
. ,
/ 2
.
(queryComponent())
(getMonitorData()) .
.
컴포넌트 이력 관리자
2. (component history manager)
.
/ (component/port monitor
tables) (monitor data records
pool) .
/ /
.
CompContext
PortContext
1:N . CompContext
PortContext .
.
(monitor data) 1
/ ·
, , ·
2. / .
Table 2. The list of component/port events.
COMP_START / ID
COMP_COMPLETE / ID /
SERVICE_START / ID
/ ID
/ SERVICE_COMPLETE
/ ID
/ ID
,
DATA_PUSH / ID
/ ID /
DATA_POP
COMP_CHECKPOINT ID
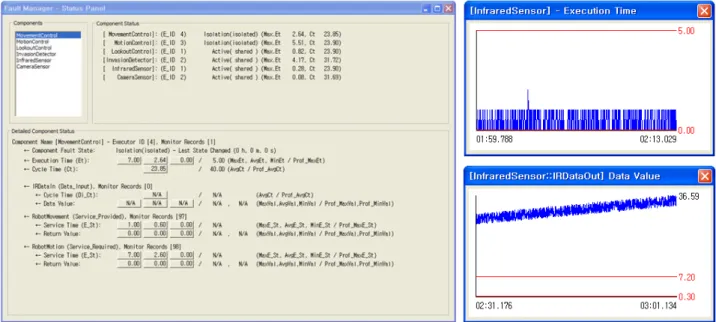
5. (UI) .
Fig. 5. User interface for the components monitor.
. CompContext, PortContext /
.
CompContext
PortContext .
3. 컴포넌트 모니터 사용자 인터페이스(component monitor UI)
(UI, User Interface)
5 .
3 .
5
30 .
실험 및 평가 V.
실험 환경 1.
4 .
[22] (ver. 20100630)
. UI , .
(component
repository) 9 .
. 6
.
(KITECH) [22] .
6
5 .
XML .
FaultDemo, 40ms .
, .
FaultDemo (passive) .
3. .
Table 3. The list of component execution information.
(MaxEt) (AvgEt) (MinEt) (AvgCt) (MaxE_St) (AvgE_St) (MinE_St) (Return MaxVal) (Return AvgVal) (Return MinVal) (Di_Ct) (Do_Ct) (MaxVal) (AvgVal) (MinVal)
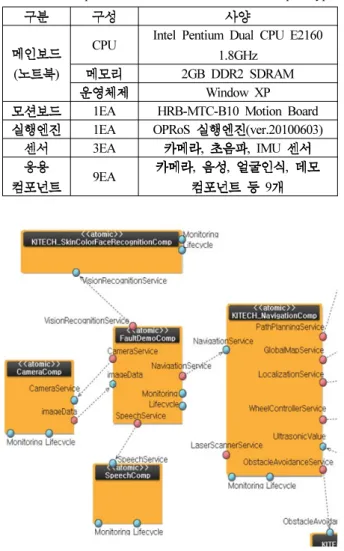
4. .
Table 4. Basic specification of the reconnaissance robot prototype.
( )
CPU Intel Pentium Dual CPU E2160 1.8GHz
2GB DDR2 SDRAM Window XP 1EA HRB-MTC-B10 Motion Board
1EA OPRoS (ver.20100603)
3EA , , IMU
9EA , , ,
9
6. .
Fig. 6. The software component diagram of the robot prototype.
5. . Table 5. Component profile setting value for the test.
( : ms)
(Ct) (Max.Et) (Avg.Ct)
FaultDemo 40 50 50
Camera 40 30 50
Speech Passive N/A N/A
KITECH_Skin Passive N/A N/A
FaultDemo .
, FaultDemo 30
. 실험 결과 및 분석
2.
· FaultDemo
6 .
6.25ms .
40.00ms .
·
FaultDemo
43.54ms .
44.52ms
40.00ms .
,
.
7 6
. UI
30
.
,
.
결론 VI.
.
, / ,
, - 4
.
.
7. FaultDemo ( ) ( ), ( )
( ) .
Fig. 7. Execution time(upper-left) and average cycle time(upper-right) of FaultDemo component, execution time(lower-left) and data return value(lower-right) monitoring result of face recognition service code.
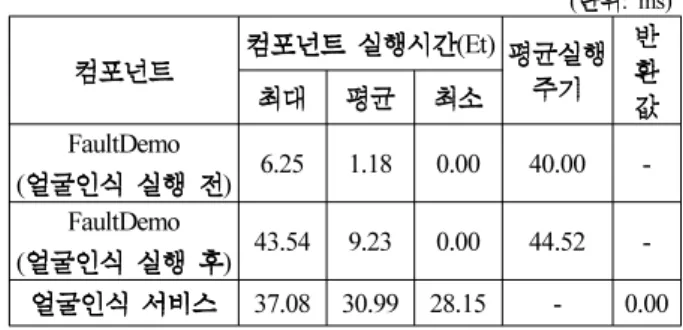
6. .
Table 6. Monitoring result of the robot software components.
( : ms) (Et)
FaultDemo
( ) 6.25 1.18 0.00 40.00 -
FaultDemo
( ) 43.54 9.23 0.00 44.52 -
37.08 30.99 28.15 - 0.00
. · ,
. FaultDemo
6.25ms 43.54ms
.
.
-
.
. 참고문헌
[1] D. Brugali and P. Scandurra, “Component-based robotic engineering (Part I),” IEEE Robotics & Automation Magazine, vol. 16, no. 4, pp. 84-96, Mar. 2009.
[2] D. Brugali, et al., Software Engineering for Experimental Robotics: Trends in Robotic Software Frameworks, Springer, 2007.
[3] C. Côté, Y. Brosseau, D. Letourneau, C. Raievsky, and F. Michaud, “Robotic software integration using MARIE,” International Journal of Advanced Robotic Systems-Special Issue on Software Development and Integration in Robotics, vol. 3, no. 1, pp. 55-60, Mar.
2006.
[4] P. Soetens, The OROCOS (Open Robot Control Software) Component Builder’s Manual, Ver.1.10.2, FMTC, 2007.
[5] OMG, Robotic Technology Component Specification, Ver.
1.0, Apr. 2008.
[6] Choulsoo Jang et al., “OPRoS: A new component based robot software platform,” ETRI Journal, vol. 32, no. 5, pp. 646-656, Oct. 2010.
[7] Korea Robot Standard Forum, Components for OPRoS(Open S/W Platform for Robot) Part2:
Component, KOROS 1067-2:2009, 2009.
[8] KITECH, OPRoS Component Reusability, OPRoS 2nd Phase 1st Workshop, Report, 2011.
[9] J. M. Hart, Windows System Programming, Addison- Wesley, 2004.
[10] B. G. Shim, B. H Baek, and S. Y. Park, “A systematic robot fault-tolerance approach,” Proc. of 33rd IEEE COMPSAC, vol. 1, pp. 624-625, 2009.
[11] J. E. Cooling, Software Engineering for Real-Time Systems, Addison-Wesley, 2003.
[12] R. Wilhelm, et al., “The worst-case execution-time prob- lem-overview of methods and survey of tools,” ACM Transactions on Embedded Computing Systems (TECS),
vol. 7 Issue 3, April 2008.
[13] D. Garlan and B. Schmerl, “Model-based adaptation for self-healing systems,” Proc. of the First Workshop on Self-Healing Systems, pp. 27-32, 2002.
[14] J. Scott and R. Kazman, “Realizing and Refining Architectural Tactics: Availability,” CMU/SEI, U.S., Report, no. 6, 2009.
[15] D. Sundmark, A. Möller, and M. Nolin, “Monitored software components - a novel software engineering approach,” Proc. of the 11th Asia-Pacific Software Engineering Conference, pp. 624-631, Nov. 2004.
[16] F. Lüders, D. Flemström, and A. Wall, “Software components services for embedded real-time systems,”
Proc. of the WICSA 2005, pp. 278-279, 2005.
[17] D. Garlan, B. R. Schmerl, and J. Chang, “Using gauges for architecture-based monitoring and adaptation,” Proc.
Working Conference on Complex and Dynamic System Architecture, Brisbane, Australia, Dec. 2001.
[18] G. Edwards, et al., “Architecture-driven self-adaptation and self-management in robotics systems,” Proc. of the SEAMS 2009, Vancouver, Canada, pp. 142-151, May 2009.
[19] N. Mahadevan, A. Dubey, and G. Karsai, “Application of software health management techniques,” Proc. of the SEAMS 2011, Honolulu, USA, pp. 1-10, May 2011.
[20] C. Szyperski, Component Software-Beyond Object- Oriented Programming, Addison-Wesley, ACM Press, 2002.
[21] A. Makarenko, A. Books, and T. Kaupp, “Orca: components for robotics,” In International Conference on Intelligent Robots and Systems(IROS), pp. 163-168, Oct. 2006.
[22] OPRoS Project Homepage, http://www.opros.or.kr, 2011.
김 종 영
1998 ( ). 2005
( ).
2009 ~ .
, Self-Healing/Adaptive S/W . 윤 희 병
1983 . 1986
. 1991 Naval
Postgraduate School .
1998 Georgia Institute of
Technology . 2002 ~
. 2004 ~ / ,
,
, .
, , , ,
.