<응용논문> pISSN 1226-0606 eISSN 2288-6036
운전자와 현장조업자의 협동훈련을 위한 플랜트 훈련시스템 플랫폼 연구
이경창
1,2
· 정교일3
· 문두환4
· 윤청2†
1
㈜톨레미시스템,2
충남대학교 컴퓨터공학과,3
한국 전자통신 연구원4
경북대학교 정밀기계공학과A Study on Plant Training System Platform for the Collaboration Training between Operator and Field Workers
Gyungchang Lee
1,2
, Kyo-il Chung3
, Duhwan Mun4
, and Cheong Youn2†
1
Ptolemy System Corp.2
Dept. of Computer Science and Engineering, Chungnam Nat’l Univ.3
Electronics and Telecommunications Research Institute4
Dept. of Precision Mechanical Engineering, Kyungpook Nat’l Univ.Received 6 October 2015; received in revised form 11 November 2015; accepted 11 November 2015
ABSTRACT
Operator Training Simulators (OTSs) provide macroscopic training environment for plant opera- tion. They are equipped with simulation systems for the emulation of remote monitoring and controlling operations. OTSs typically provide 2D block diagram-based graphic user interface (GUI) and connect to process simulation tools. However, process modeling for OTSs is a diffi- cult task. Furthermore, conventional OTSs do not provide real plant field information since they are based on 2D human machine interface (HMI). In order to overcome the limitation of OTSs, we propose a new type of plant training system. This system has the capability required for col- laborative training between operators and field workers. In addition, the system provides 3D vir- tual training environment such that field workers feel like they are in real plant site. For this, we designed system architecture and developed essential functions for the system. For the verifi- cation of the proposed system design, we implemented a prototype training system and per- formed experiments of collaborative training between one operator and two field workers with the prototype system.
Key Words: HMI, ITS, OTS, Plant training system, Virtual reality
1. 서 론
플랜트와 같은 대형 자동화 기계설비는 건설단
계에서 운전자에 대한 운용훈련이 요구되며 운용 단계에서도 운용숙련도 향상을 위하여 사고 예방 및 상황 조치에 대한 지속적인 훈련이 요구된다.
하지만, 건설단계에서는 실 플랜트 설비가 구축 되지 않아 운용조작 훈련이 불가하고 운용단계에 서는 실 플랜트에 대한 훈련조작이 제한되므로, 설
†Corresponding Author, [email protected]
©2015 Society of CAD/CAM Engineers
비를 모의(Simulation)하는 별도의 훈련시스템 (Training System) 즉, 시뮬레이터(Simulator)가 제 한된 상황에서의 훈련요구를 충족할 수 있는 최적 의 대안이 될 수 있다.
항공기, 선박 등의 경우 실 장비의 운용과정에 서 발생할 수 있는 사고가 인명 및 장비 손실과 직 결되고, 부품 고장 등에 대한 상황조치 훈련을 실 장비에 직접 적용하기 어렵기 때문에 별도의 시뮬 레이터를 이용한 훈련이 활성화 되어 있다.
특히 국방 분야에서는 무기체계 운용 숙련도 향 상을 통한 군사력 확보를 위해 전투기, 잠수함 등 에 대한 고가의 훈련 시뮬레이터들이 운용되고 있 다. 군용 항공기 시뮬레이터는 조종장치, 계기/스 위치 등의 모의하드웨어를 항공기 모델링 소프트 웨어로 연동하도록 설계
[1]
함으로써 훈련자에게 항 공기 조작에 대한 상호작용 환경을 제공하며, 실 장비와 유사한 조종 운용 경험[2]
을 제공한다.이러한 국방 분야 시뮬레이터들은 훈련 대상 시 스템의 운용 형태에 따라 전투기 조종사 1명에 대 한 단일 훈련환경 또는 잠수함 내 다수의 승조원 간 협동훈련 환경 등 다양한 훈련시스템 환경으로 구현되어 있다.
플랜트 훈련시스템도 이와 유사하게 플랜트 설 비 및 공정 운용에 따른 계기판(Gage), 지시기 (Indicator) 등의 상태값을 가시화하고 훈련자에게 운용 조작 환경을 제공할 수 있는 플랜트 현장 설 비의 형상적 모의와 정상 혹은 비정상의 공정 상 태 변화를 모의하는 현장설비 공정 모의 소프트웨 어의 통합(Integration)으로 구현되어야 한다. 그러 나, 플랜트 훈련시스템의 구현에 있어 대형 기계 설비로서의 플랜트 시설은 광범위하게 건설되므 로 하드웨어로써 현장 설비 형상 모의가 어려우 며, 플랜트 동작기능 특성으로 가스 혹은 유류와 같은 유체 흐름과 필터, 밸브, 조절기(Regulator) 등에 따른 온도, 압력 및 유동 교란 등을 수학적으 로 모델링하고 모의 소프트웨어로 구현하는 실용 적인 방안이 필요하다.
대형 자동화 기계설비로서의 플랜트 운용형태 는, 원격 감시제어를 담당하는 상황실 운전자 (Operator)와 현장조업자들(Field Workers)의 협동 으로 운용되며 사고조치 또한 상황실 제어 및 현 장 확인의 유기적 협업과정으로 이루어진다. 따라 서, 플랜트 훈련시스템은 운전자와 현장조업자들 에게 실 운용환경과 유사한 훈련환경을 제공하며
동시에 운전자와 현장조업자들이 협동훈련을 할 수 있는 플랫폼으로 구성되어야 한다.
본 연구에서는 기존 플랜트 훈련시스템들의 제 한사항을 분석 후, 국방분야 유사 시뮬레이터 시 스템 구성을 응용하여 운전자와 다수 현장조업자 가 동시 상호 협동할 수 있는 훈련시스템 플랫폼 을 제시하고, 구현을 통하여 이를 검증하고자 한다.
2. 기존 연구
2.1 원격 감시제어 운전자 훈련환경
플랜트의 원격 상황실에서는 원격 감시제어가 가능한 HMI(Human Machine Interface) 시스템이 운용된다
[3]
. 이러한 HMI 시스템은 전체 플랜트 구 성과 제어 흐름을 PFD(Process Flow Diagram) 혹 은 P&ID(Piping & Instrumentation Diagram)에 기 반한 2D 블록다이어그램 형태로 추상화하고, 플 랜트 구성 부품의 상태 신호를 연동 가시화한다.기존 플랜트 훈련시스템은 원격 상황실 HMI를 모의하고 플랜트 공정모의 소프트웨어와 연동하 도록 구현하여
[4]
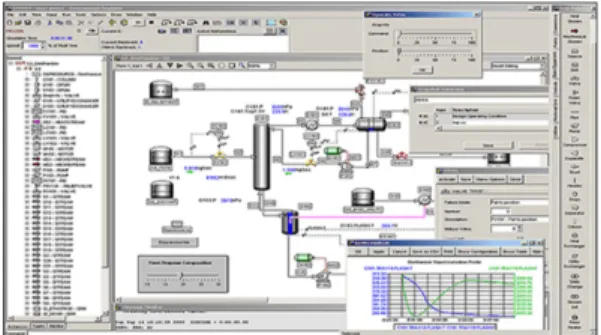
플랜트 구성과 공정 제어 흐름 가 시화하고 있다. Fig. 1의 OTS (Operator Training Simulator)[5]
또한 원격 상황실 HMI를 이용하여 훈 련자에게 플랜트 운용에 대한 상호작용 환경을 제 공하고 있다.OTS는 플랜트 원격 상황실 운용자에 대해 운용 환경과 유사한 상호작용 훈련환경을 제공할 수 있 으나, 플랜트 현장조업자에 대해서는 현장상황을 제시하지 못하는 단점이 있다. 또한, 플랜트 설비 를 2D 블록다이어그램 형태로 가시화함으로써 전 체 플랜트 구성과 제어 흐름에 대한 거시적 이해 를 제공할 수 있으나, 플랜트 현장 시설물 및 부품 에 대한 위치, 형상 등 공간에 대한 훈련 효과를
Fig. 1 OTS (source : Schneider Electric SE)
제공할 수는 없다.
2.2 현장조업자 훈련환경
대형 기계 설비의 사고 대응을 위한 훈련 시뮬 레이터에 가상현실(Virtual Reality)의 적용은 플랜 트 현장을 3D로 모델링 하여 실시간 렌더링 (Rendering)을 통하여 현장조업자에 대한 가상의 훈련환경을 제시하며 추가적인 그래픽, 사운드 효 과 등을 통합할 수 있어, 실감형 훈련효과를 제공 할 수 있는 대안으로 제시되었다
[6]
.Schneider Electric SE사는 가상현실을 이용하여 플랜트 설비에 대한 훈련 효과를 제공하여 현장 작업을 가상으로 체험할 수 있는 EYESIM 솔루션 을 가상현실 기반 훈련 시뮬레이터(ITS, Immersive Training Simulator)로서 개발하였다.
ITS는 현장조업자에 대한 훈련환경을 제공하지 만, 다수 현장조업자 간 협동훈련 그리고 현장조 업자와 원격 감시제어 상황실 운전자와의 협동훈 련에 대한 구체적인 방안을 제시하지 못하고 있다.
2.3 3D 모델링을 이용한 가상현실 구현 3D로 모델링 된 플랜트 현장을 가상현실로 가 시화하기 위해서는 실시간 렌더링 엔진이 요구된다.
기존 가상현실을 이용한 가시화 연구
[7]
에서는 상 용 실시간 렌더링 엔진의 많은 기능 제약으로 인 해 OGRE[8]
등의 오픈 소스 기반 실시간 렌더링 엔진을 이용하여 실감형 효과를 직접 구현한 바 있다. 또한, 가상현실 환경 구현에 있어 3D 모델 링의 도입(Import) 후 그래픽 효과 처리만 필요한 정적 가상환경과 외부 데이터 연동으로 상태변화 가 가시화되어야 하는 동적 가상환경으로 구분 구 현함으로써, 개발 생산성과 가상환경 몰입도를 높 이는 기술이 연구된 바 있다[9]
.2.4 운전자와 현장조업자 협동훈련 환경 국방 무기체계인 대한민국 해군의 214급 잠수 함은 물탱크 내 물의 충수와 배수 상태를 원격 혹 은 현장에서 직접 밸브 조작함으로써 잠수와 부 상이 제어된다. 잠수함의 물탱크, 밸브, 계기판 등의 상태는 HMI시스템인 EMCS(Engineering, Monitoring and Control System)
[10]
를 이용하여 원 격으로 감시 제어되므로, 원격 감시제어 운전자와 현장조업자의 협동으로 운용되는 소규모 플랜트 시설로 볼 수 있다.잠수함 승조원들의 초기 운용 교육과 지속적인 운용 숙련도 향상을 목적으로 개발된 잠수함 조종 시뮬레이터는, HMI 시스템을 모의하고 잠수함에 배치된 계기판 류, 밸브 류 일부를 하드웨어로 모 의 구현하여 하부계통(Sub-System) 모의 소프트웨 어와 실시간 동시 연동하도록 통합함으로써, 원격 감시제어 운전자와 현장조업자들 간 협동훈련 환 경을 제공하고 있다.
잠수함 조종시뮬레이터에서 계기판 류, 밸브 류 등의 모의 구현 및 실 공간 배치는, 많은 비용이 요구되기 때문에 훈련시스템 구축 비용 제한이 낮 은 국방분야 시뮬레이터에서도 훈련요구 시나리 오에 따라 제한적으로 구현되고 있다.
2.5 컴포넌트를 이용한 개발 환경
진보된 원격 감시제어 HMI 소프트웨어 자동 화 개발도구들
[11,12]
은 VPL(Visual Programming Language)을 응용하도록 개발되었으며, 외부 신 호 연동에 따라 상태값이 변화되는 동적 심볼 등 의 소프트웨어 컴포넌트를 재활용하는 연구[13]
가 수행된 바 있다.VPL 환경을 제공하는 자동화 개발도구로써 HMI 소프트웨어를 개발할 경우 동적 심볼 컴포넌트에 속성(Property) 값으로 외부 신호 연동에 대한 통 신, 통신 값 처리형태 등을 정의함으로써 별도 코 딩없이 편리한 개발이 가능하다.
OTS 또한 HMI 소프트웨어 자동화 개발도구를 통하여 동적 심볼 컴포넌트의 속성을 정의하고 플 랜트 공정모의 결과를 연동함으로써 별도 코딩 없 이 개발되고 있다.
2.6 모의 소프트웨어 개발
훈련시스템은 훈련자에게 상호작용 환경을 가 시화하는 하드웨어와 하드웨어 운용에 따라 대상 시스템의 작동을 모의하는 모의 소프트웨어의 통 합으로 구현된다. 플랜트 훈련시스템은 가시화 시 스템에 공정 상태값을 시현하기 위하여 배관 등의 유체 흐름과 필터, 밸브, 조절기 등의 유동 교란 효 과로 및 유체의 온도, 압력, 유량 등 물리적 값을 모의하는 소프트웨어가 요구된다.
일부 가상현실 기반 시뮬레이터 연구
[14]
에서 유 동 효과의 사실성 확보를 위해 전산유체역학(CFD, Computational Fluid Dynamics) 적용이 시도된 바 있다. 그러나, CFD 기반 해석은 많은 계산 시간요구로 인해, 실시간 훈련시스템 적용이 제한되므 로, 이를 해결하기 위한 대안이 요구된다.
3. 제안하는 훈련시스템 플랫폼 설계
살펴 본 기존 연구 및 응용시스템에서는 운전자 혹은 현장조업자에게 단독 훈련환경을 제공하였 다. 하지만, 실제 플랜트 운영사고 발생 시 운전자 가 인지하는 원격 감시정보와 원격 제어만으로 완 전한 사고조치를 수행할 수 없고, 현장조업자에 의 한 현장확인과 조치가 협업을 통하여 동시 수행되 어야 한다.
본 연구에서는 운전자와 현장조업자가 상호 협 동훈련할 수 있는 플랫폼 구성을 제안하며, 응용 시스템을 구현하여 타당성을 검증하고자 한다. 이 를 위하여 운전자와 현장조업자가 협동하는 소규 모 플랜트 시설 운용개념을 분석하고, 플랜트 훈 련 목적에 적합한 시스템 구성을 제안하고자 한다.
3.1 플랜트 시스템 협동운용 개념
도심 지역에 LNG 가스의 안정적 공급을 위한 소규모 플랜트 시설인 지구 정압소는 밸브 류, 계 기판 류, 배관 류, 필터, 압력 조절기 등이 설비된 지구 정압소 현장과 원격에서 이를 감시제어 하는 상황실 환경으로 Fig. 2와 같이 운용되고 있다.
현장조업자는 지구 정압소 현장을 주기적으로 순찰하고, 상황실 운전자는 원격 감시제어 HMI 소프트웨어를 이용하여 플랜트 시설의 이상 상태 를 감시 및 통제한다. 지구 정압소 현장에서의 사 고 발생 시 현장 및 상황실 HMI에 동시 경보를 발 생시키며, 상황실 운전자와 현장조업자는 상호 협
동하여 사고에 대한 조치를 실시하고 결과를 확인 하는 업무를 수행한다.
3.2 플랜트 훈련시스템 목적
공정 시뮬레이션(Simulation) 시스템과 훈련용 시뮬레이터(Simulator) 시스템은 시스템 목적에 있 어 차이가 있다.
시뮬레이션 시스템은 공정을 수학적으로 모델 링 하여 다양한 상황에 대한 현상을 분석, 예측함 을 목적으로 하기 때문에, 실시간성 보다는 정확 한 해석을 우선한다. 반면, 시뮬레이터 시스템은 예상되는 상황에서 정의된 조치의 숙달을 목적으 로 하기 때문에, 훈련자와 상호작용을 위한 실시 간성이 우선 한다.
본 연구의 플랜트 훈련시스템은 발생 가능한 사 고 상황에 대하여 현장조업자 및 원격 상황실 운 용자가 개별 및 상호 협동으로 조치하는 과정의 훈련을 목적으로 한다. 이때, 발생 가능한 사고 상 황은 현상과 조치가 사전 정의된 훈련용 시나리오 를 의미한다. 훈련 시스템은 훈련자에게 해당 시 나리오에 대한 반복 숙달을 통하여 긴급한 조치가 요구되는 사고 상황에서 판단에 앞서는 반사적 조 치능력을 함양시킴으로써 대형사고로의 전파방지 를 목적으로 한다.
플랜트 설비에서 누유, 화재 혹은 폭발 등의 사 고는 대형 재난상황에 곧바로 귀결되므로, 이를 원 천적으로 자동 차단하는 충분한 안전설계가 반영 되어 있다. 따라서, 본 연구의 플랜트 훈련시스템 은 플랜트 운영자가 인지하고 운전자와 현장조업 자가 협동 조치함으로써, 대형 사고로 전파됨을 방 지할 수 있는 사고현상 가시화와 조치에 대한 훈 련환경의 제공을 목적으로 한다.
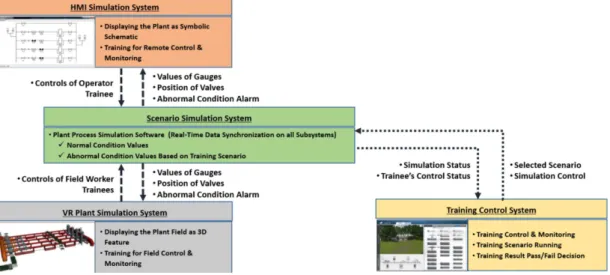
3.3 협동훈련시스템 플랫폼 구성
본 연구에서는 운전자와 현장조업자의 협동훈 련을 위한 플랜트 훈련시스템을 Fig. 3과 같이 가 상현실 플랜트 모의시스템, HMI 모의시스템, 훈 련 통제시스템 및 시나리오 모의시스템의 통합으 로 구성한다.
운전자 훈련을 위한 HMI 모의시스템, 현장조업 자 훈련을 위한 가상현실 플랜트 모의시스템을 각 각 구현하여 동시 운영될 수 있도록 한다.
공정모의 시뮬레이션 엔진을 이용하여 훈련 시 스템을 연동하는 기존 연구
[15]
와 달리 이산 사건 Fig. 2 Local area LNG pressure control plant중심의 시나리오 모의시스템을 통하여 운전자 및 현장조업자의 협동훈련 운용 조작 결과가 실시간 연동할 수 있도록 한다.
3.3.1 가상현실 플랜트 모의시스템
가상현실 플랜트 모의시스템은 기존 ITS와 유 사하게 플랜트 환경을 3D로 모델링 후 실시간 렌 더링 엔진에 통합하여 현장 조업자 훈련자에게 플 랜트 환경을 시현하는 시스템이다.
본 연구의 가상현실 훈련환경은 훈련자가 인지 할 수 있는 사고현상으로 계기판 류 값 변화, 밸브 류 상태변화 등을 가시화하도록 구현한다.
실시간 상태값 변화를 반영하는 계기판 값 가시 화, 조이스틱 등의 입력장치를 이용한 가상공간 내 훈련자 위치 이동, 밸브 류 조작 등을 훈련자 상호 작용 환경으로 제공한다. 또한, 다수의 가상현실 플랜트 모의시스템을 시나리오 모의시스템과 실 시간 연동하도록 함으로써 다수의 현장조업자 훈 련자들은 동일한 가상환경에서 상대 훈련자 캐릭 터의 훈련조작을 시각적으로 확인하며 협동훈련 을 수행할 수 있도록 한다.
3.3.2 HMI 모의시스템
HMI 모의시스템은 기존 OTS와 유사하게 플랜 트 시설의 원격 감시제어 HMI 소프트웨어를 모의 하여 상황실 운전자 훈련자에게 가상의 훈련환경 을 제공하는 시스템이다.
이는 시나리오 모의시스템을 중심으로 실시간
연동되기 때문에 계기판 값, 밸브 개폐 율 등 플랜 트 상태값을 HMI에 시현하고 HMI 운용조작이 훈 련자 상호작용 환경으로 제공될 수 있다.
본 연구에서의 HMI 모의시스템은 시나리오 모 의시스템과 연동하여, HMI 모의시스템과 가상현 실 플랜트 모의시스템간 실시간 플랜트 상태값의 공유하기 때문에, 운전자 훈련자와 현장조업자 훈 련자의 협동훈련을 가능하게 한다.
3.3.3 시나리오 모의시스템
시나리오 모의시스템은 훈련 시나리오에 따라 계기판 류 혹은 밸브 류 등의 상태값을 모의하는 소프트웨어가 탑재 운용되는 시스템이다.
가상현실 및 HMI 모의환경에서 훈련자들의 상 황조치 조작 이벤트로부터 조치결과 상태값을 모 의하고 가상현실 및 HMI 모의에 실시간 동시 연 동되도록 구현한다.
기존 CFD 등을 이용하는 복잡한 공정모의 소프 트웨어와 비교하면, 시나리오 모의 소프트웨어는 공정에 따른 정상 상태값과 훈련 시나리오에 따라 변경되는 상태값 DB를 참조하도록 단순화하였기 때문에, 이산 변수 동적 모사기를 이용한 연구
[16]
와 유사하게 정의된 훈련 시나리오에 대한 모의를 효율적으로 구현할 수 있다.
3.3.4 훈련 통제시스템
훈련 통제시스템은 준비된 훈련 시나리오의 선 택 및 실행, 훈련시스템의 감시, 훈련 결과의 판정
Fig. 3 Plant training system platform
등을 제공하는 시스템이다.
훈련 통제시스템 또한 시나리오 모의시스템을 통하여 연동되도록 구성하여 훈련 상태를 감시 통 제할 수 있도록 한다.
3.4 가상현실 자동화 개발환경
기존 가상환경 개발에서는 상태값이 실시간으 로 변경되는 계기판 류, 밸브 류 등의 동적 가상환 경은 공정모의 소프트웨어와 연동하여 상태값을 가져온 뒤 3D로 가시화 할 수 있도록 코딩으로 구 현되었다.
본 연구에서는 기존 2D 심볼 컴포넌트를 활용 하는 VPL 기반 HMI 소프트웨어 자동화 개발개념 을 응용하여 3D 가상현실에 대한 자동화 개발환 경을 구현한다. 동적 가상환경 객체를 컴포넌트로 구현한 뒤 가상현실 개발 플랫폼에 통합함으로써 별도 코딩 없이 컴포넌트 적용과 속성 정의로써 동적 가상환경 개발에 응용할 수 있도록 한다.
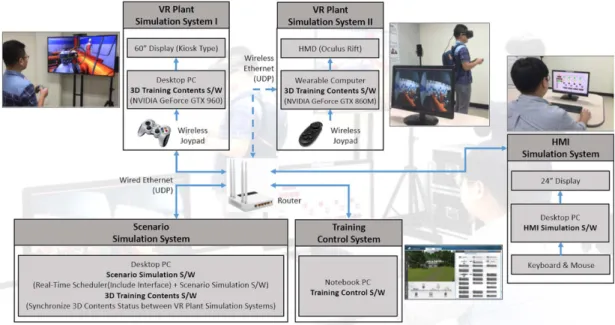
4. 훈련시스템 플랫폼 구현 및 실험
3절에서 제안한 플랜트 훈련시스템 플랫폼을 지구 정압소 시설에 대해 원격감시 운전자 1명 과 현장조업자 2명이 동시에 훈련할 수 있는 Fig.
4의 훈련시스템 구현에 적용하여 타당성을 검증 하였다.
4.1 훈련 시스템 플랫폼 시제품 구현 4.1.1 가상현실 플랜트 모의시스템
가상현실 플랜트 모의시스템은 3D로 구현되는 가상현실 환경과 이를 시현하기 위한 시스템으로 구성된다.
4.1.1.1 가상현실 환경 구현
연구의 가상현실 환경 구현은 많은 3D 게임 개 발에 활용되어 실시간 렌더링 엔진 성능이 검증된 UNITY엔진을 적용하였다.
이는 UNITY
[17]
엔진이 ORGE 혹은 HAVOK[18]
등의 게임엔진 대비 편리한 통합개발환경을 제공 하고 UNREAL
[19]
등의 게임엔진 대비 풍부한 개 발자원이 공유되어 이를 활용할 수 있기 때문이 다. UNITY 엔진은 가상환경을 구현할 수 있는 개 발 플랫폼 환경으로 동적 가상환경 3D 객체 컴포 넌트를 개발환경에 통합 활용할 수 있었다.플랜트 가상환경에서 배관 류, 저장 탱크 류, 건 물 등은 실시간 상태변화가 없는 정적 가상환경으 로 CAD 도면과 현장 실측을 통하여 3D 모델링 후 렌더링 엔진에 통합하여 Fig. 5와 같이 구현하였다.
실시간 상태값의 변화가 시현되어야 되는 계기 판 류, 밸브 류 등의 동적 가상환경 객체는 Fig. 6 과 같이 컴포넌트로 구현한 뒤 UNITY 엔진 개발 플랫폼에 통합 후 가상환경 구축에 적용함으로 써, 3D 기반 VPL을 이용한 자동화 개발환경 구현
Fig. 4 Plant training system for the collaboration training between operator & field workers
을 검증하였다. 이때, 동적 가상환경 자동화 개발 환경에서 컴포넌트는 고유 ID 식별 등 컴포넌트 동작을 위한 속성이 지정되며, 실행(Run-Time) 시 점에 시나리오 모의 소프트웨어가 제공하는 ID에 대한 모의값을 연동하여 상태값을 시현할 수 있게 구현하였다.
4.1.1.2 가상현실 시현
이 연구에서는 운전자 외에 2명의 현장조업자가 상호 협동훈련할 수 있도록 2개의 가상현실 훈련 환경을 구현하였다.
첫 번째 형태는 대형 스크린에 가상현실을 시현
하고 무선 조이스틱으로 현장 조업자 훈련자가 훈 련 컨텐츠와 상호작용(시점위치 이동, 밸브 류 등 의 조작 등)할 수 있도록 구현하였다.
두 번째 형태는 착용형 영상시현장치(HMD, Head Mounted Display)의 한 형태인 Oculus Rift를 이용 하여 몰입형(Immersive) 가상현실
[20]
을 시현하고 무선 조이스틱으로 훈련 컨텐츠와 상호작용할 수 있도록 구현하였다. 이때, 영상발생 컴퓨터로부터 HMD에 3D 가상현실 영상을 제공하기 위한 영상 케이블이 훈련자의 훈련 행동을 제한할 수 있으므 로 착용형 컴퓨터(Wearable Computer)로서 이러 한 제한을 해소하였다.Fig. 5 Plant training system static & dynamic VR environment
Fig. 6 VR automatic development environment (on UNITY platform) & algorithm
4.1.2 HMI 모의 소프트웨어
지구 정압소 상황실 운전자 훈련용 HMI 모의 소프트웨어는 시나리오 모의 소프트웨어가 제공 하는 플랜트 구성품 상태값을 시현하고 훈련자가 HMI 화면을 통하여 심볼 조작으로 변경된 상태값 을 시나리오 모의 소프트웨어에 제공할 수 있도록 구현하였다.
Fig. 7과 같이 지구 정압소 PFD를 이용하여 공 정 흐름을 정적으로 표현하였고 상태값의 시현 및 제어가 가능한 심볼은 소프트웨어로 시나리 오 모의 소프트웨어와 연동될 수 있도록 하였다.
또한 실제 지구 정압소 상황실 HMI를 현장 실측
하여 동일 형상으로 구현하고 훈련자의 HMI 조 작이 시나리오 모의 소프트웨어와 연동할 수 있 도록 하였다.
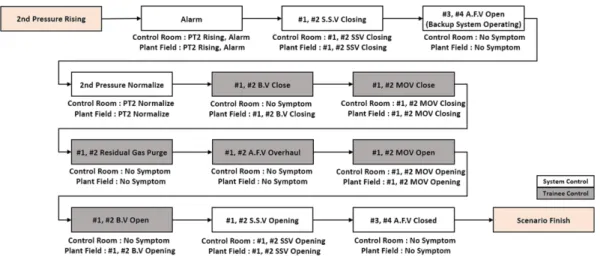
4.1.3 시나리오 모의 소프트웨어
Fig. 8은 축류 밸브(Axial Flow Valve) 결함으로 2차 압력 상승 발생 시 사고상황에 대한 현상과 축 류 밸브 결함을 해소하기 위한 훈련자 조치 절차 가 분석된 훈련 시나리오이다.
시나리오 모의 소프트웨어는 공정모의 대신, 훈 련자가 시각적으로 공정의 상태를 판단하는 계기 판 류 혹은 밸브 류의 정상 상태값과 훈련 시나리 오에 기반한 이상 상태값을 DB에 저장하고 훈련 운용에 따라 정의된 상태값을 제공할 수 있도록 하였다. 훈련 통제 소프트웨어부터 훈련 시나리오 와 훈련자의 상황조치 제한시간을 제공받고, 계기 판 류 및 밸브 류의 상태값을 HMI 모의 소프트웨 어 및 가상현실 플랜트 모의 소프트웨어에 동시 제공함으로써 상황실 및 플랜트 현장의 상태값이 동기화 될 수 있도록 하였다. 이후, 운전자 혹은 현 장조업자가 사고조치를 조작하는 경우 변경된 상 태값을 다시 제공하여 시나리오에 따른 순차적 사 고조치 훈련을 수행할 수 있도록 하였다.
이 연구의 모의 소프트웨어는 실시간 공정모의 에 기반하지 않으므로, 상황조치 제한시간을 초과 하거나 정의된 시나리오 외 훈련자 조작이 발생하 는 경우에 대한 처리가 필요하다. 이를 위하여 훈 련실패 상황을 전체 시스템에 제공하고 훈련이 중 단되도록 하였다.
Fig. 7 Control room HMI simulation S/W
Fig. 8 Local area LNG pressure control plant safety training scenario
4.1.4 훈련 통제 소프트웨어
훈련 통제 소프트웨어는 훈련 시나리오 목록을 제시하여 이를 선택함으로써 시나리오 모의소프 트웨어의 훈련 실행을 제어할 수 있도록 구현하였 다. 또한, 각각의 훈련상태에 대한 훈련자 사고조 치 목표시간을 시나리오 설정으로 조정할 수 있도 록 하여 반복 숙달에 따른 훈련 난이도롤 통제할 수 있도록 하였다.
4.2 개발 시스템을 활용한 훈련결과 분석 본 연구에서 모의 구현한 대상설비를 포함한 많 은 플랜트 설비들은 사고상황 발생 시 자동으로 예비시스템 가동을 통하여 사고의 전파를 방지하 고 있다. 이 경우, 원격 상황실의 2D 블록다이어 그램 기반 HMI를 이용하여 구현된 OTS는 사고상 황 경보, 예비시스템 가동상태 감시, 시스템 블록 다이어그램을 통한 사고원인 분석에 대한 훈련환 경을 제공할 수 있었다.
본 연구에서 구현된 협동훈련 환경은 상황실에 서 사고상황 인지와 현장조업자 실 현장상황 확인 을 통한 원격 감시시스템 오류검증을 훈련 시나리 오에 추가할 수 있었다. 또한, 운전자와 현장조업 자의 음성 통신을 통한 원격 경보체계 오류 검증, 원격으로 제어되지 않는 밸브의 현장조업자 조작 을 통한 사고상황 해소의 전 과정을 훈련할 수 있 었다.
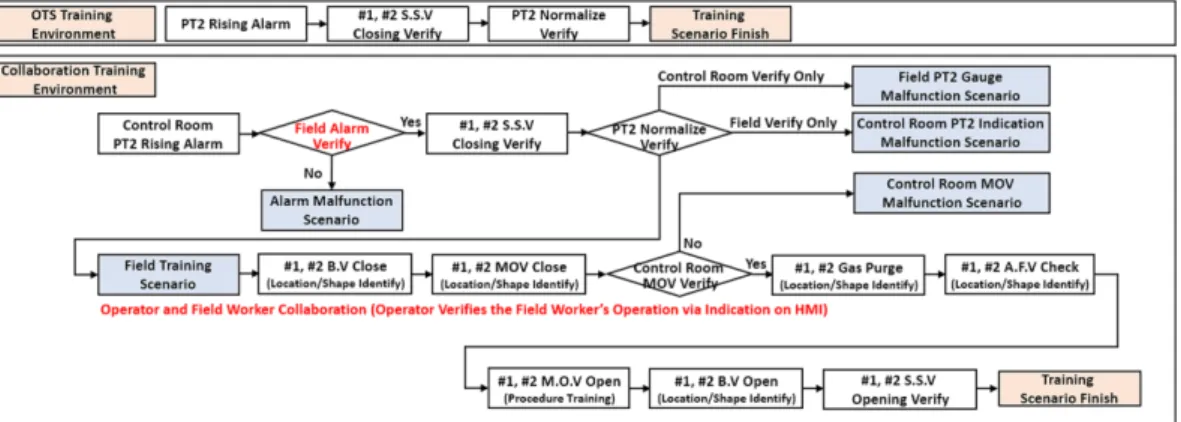
Fig. 9의 비교와 같이 지구 정압소 2차 압력 상 승에 대한 본 연구의 훈련 시나리오에 대하여, 기 존 OTS와 유사한 상황실 HMI모의에서는 압력상 승 경보발생, 기본가스 공급라인(#1, #2)의 S.S.V (Sleeve Shut-off Valve) 닫힘, 일정 시간 경과 후
2차 압력 디지털 값 변화로 예비 정압기 작동을 추 론할 수 밖에 없었다. 하지만, 협동훈련 환경인 가 상현실 플랜트 모의에서 아날로그 계기판을 통하 여 2차 압력 상승을 재확인하고, S.S.V의 기계적 닫힘, 일정 시간 경과 후 아날로그 계기판을 통한 2차 압력 변화를 상황실과 병행 확인함으로써 원 격 감시시스템의 오작동에 대한 조치훈련을 수행 할 수 있었다. 또한, 연속된 현장 훈련조치로써 B.V(Ball Valve) 및 M.O.V(Motor Operated Valve) 수동 닫음과 잔류가스 배출을 실시하고, 현장조치 절차준수 여부를 상황실에서의 원격 감시통제 함 으로써 지속적인 협동훈련을 실시할 수 있었다.
또한, 2가지 형태로 구현된 가상현실 기반 훈련 환경에서 2명의 현장조업자 훈련자는 가상현실 환 경에서 정압 가스배관 입력위치 및 출력위치에 각 각 위치함으로써, 분산 배치된 계기판 류 확인과 밸브 류 조작을 위한 이동을 최소하며 상호 협동 에 기반한 신속한 사고조치를 훈련할 수 있었다.
5. 결 론
플랜트 시설은 원격 감시제어 상황실 운전자와 현장조업자의 협동에 기반하여 운용되며, 이러한 실 운용과 유사한 협동훈련 환경이 요구된다.
이 연구에서는 운전자에 대한 훈련시스템인 OTS 와 현장조업자에 대한 훈련시스템인 ITS를 서버 단의 모의 소프트웨어를 중심으로 실시간 연동 함 으로써 협동훈련이 가능한 플랫폼을 제안하고 지 구 정압소 시설에 대한 훈련시스템 구현으로 타당 성을 검증하였다. 또한, 현장조업자 훈련을 위한 가상현실 환경의 구현에 있어 실시간 상태값 변화
Fig. 9 Compares training effect between OTS environment and collaboration system environment
가 시현되어야 되는 동적 가상환경 객체를 컴포넌 트로 구현하여 가상환경 개발 플랫폼에 통합한 3D 가상환경 자동화 개발도구 방법을 제안하고 간단 한 구현으로 실용성을 확인하였다.
기존의 수학적 모델링과 검증의 어려움이 따르 는 전산유체역학 해석 기반 공정 모의소프트웨어 대신, 훈련 시나리오에 정의된 상태값을 활용하는 방식으로 개발하고 실험 운용을 통하여 반복 숙달 훈련이 요구되는 훈련시스템에 실용적으로 응용 될 수 있음을 확인하였다.
본 연구의 결과로써 대형 기계설비의 안전사고 예방을 위한 운전자와 현장조업자가 협동하는 실 운용 개념의 훈련시스템의 편리한 구현과 운용이 기대된다. 향후, 보다 많은 훈련 시나리오를 추가 하여 플랜트 운용자에 대한 훈련시스템 운용 적합 성을 검증하고 기 구현된 가상현실을 응용할 수 있는 절차훈련의 확대 방안을 모색할 예정이다. 또 한, 가상현실과 훈련자 간 상호작용을 위한 전방 향 이동장치(Omni-Directional Treadmill), 동작인 식 장치 및 햅틱장치 등의 다양한 장치와의 통합 을 통하여 훈련 몰입감을 높이는 방안을 연구할 예정이다.
감사의 글
본 연구는 국토교통부 플랜트 연구사업 “햅틱기 반 플랜트 안전훈련시스템 기술개발”(과제번호 14IFIP-B085984-02”)을 통하여 수행되었습니다.
References
1. Bang, K.H. and Won, K.Y., 2001, The Specialty of Flight Simulator and Development Trend, Journal of the Korean Society of Mechanical Engineers, 41(4), pp.58-63.
2. Yang, J.Y., 2011, The Cockpit Development for the Reconfigurable Flight Simulator, Journal of The Korean Society for Aeronautical and Space Sciences, 39(7), pp.660-665.
3. Biswal, G.R., 2009, Developing PLC Based Application Software for Augmentation of Argon System & Process Control in Steel Industry, Proceedings of the International Conference on Advances in Computing, Communication and Control, ACM New York, NY, USA, pp.140-146.
4. Turton, R., Bailie, R.C., Whiting, W.B., Shaei- witz, J.A. and Bhattacharyya, D., 2012, Analysis,
Synthesis and Design of Chemical Process 4
th
Edition, Prentice Hall, pp.37-38.5. SimSci Operator Training Simulators (OTS), (http:// software.schneider-electronic.com).
6. Manca, D., Brambilla, S. and Colombo, S., 2013, Bridging between Virtual Reality and Accident Simulation for Training of Process-Industry Operators, Advances in Engineering Software, 55, pp.1-9.
7. Fang, T.H., Oh, J.Y., Hwang, H.J., Kim, B.C.
and Mun, D.H., 2011, Development of a 3D Real-Time Visualization System for Ship Han- dling Simulators Using an Open Source 3D Graphics Engine, Journal of Navigation an Port Research, 35(3), pp.187-195.
8. OGRE - Open Source 3D Graphics Engine, (http:// www.ogre3d.org).
9. Cha, M.H., Huh, Y.C. and Mun, D.H., 2014, Framework of a Training Simulator for the Acci- dent Response of Large-Scale Facilities, Trans- actions of the Society of CAD/CAM Engineers, 19(4), pp.423-433.
10. EMCS - Engineering, Monitoring and Control System, Submarine’s Onboard Control System, (http://www.industry.siemens.com).
11. SIMATIC WinCC - Operator Control and Mon- itoring Systems, (http://w3.siemens.com).
12. Experion SCADA - Control, Monitoring and Safety Systems, (http://www.honeywellprocess.
com).
13. Salihbegovič, A., Cico, Z., Marinkovič, V. and Karavdič, E., 2008, Software Engineering Approach in the Design and Development of the Industrial Automation Systems, Proceedings of the 2008 International Workshop on Software Engineering in East and South Europe, ACM New York, NY, USA, pp.15-22.
14. Cha, M.H., Lee, J.K., Park, S.W. and Choi, B.I., 2009, A Development of Fire Training Simulator Based on Computational Fluid Dynamics Sim- ulation, Transactions of the Society of CAD/
CAM Engineers, 14(4), pp.271-280.
15. Santoni, C., Mercantini, J.M., Vieira Turnell, M.F.Q., Scaico, A. and Neto, J.A.N., 2007, A Real-Time Interface Simulator for Operator’s Training: A Proposed Architecture, Proceedings of the 2007 Summer Computer Simulation Con- ference, Society for Computer Simulation Inter- national San Diego, CA, USA, pp.460-467.
16. Chang, B.M., Cho, S.I. and Moon, I., 1996, Improvement of the Safety of Chemical Process Operation using Operator Training System, The- ories and Applications of Chem. Eng., 2(2), pp.3063-3066.
17. UNITY - Ultimate Game Development Platform, (http: //unity3d.com).
18. HAVOK - Game Development Technologies, (http:// www.havok.com).
19. UNREAL - Complete Suite of Game Develop- ment Tools, (http://www.unrealengine.com).
20. Anderson, L., Esser, J. and Interrante, V., 2003, A Virtual Environment for Conceptual Design in Architecture, Proceeding of the 9
th
Eurograph- ics Workshop on Virtual Environments, ACM New York, NY, USA, pp.57-63.이 경 창
1994년 영남대학교 기계공학과 학사 1996년 영남대학교 대학원 기계공
학과 석사
2015년~현재 충남대학교 대학원 컴 퓨터공학과 박사과정
1996년~2000년 삼성항공 T-50 추진 계통팀 연구원
2000년~2014년 ㈜도담시스템스 국 방분야 연구개발사업 PM 2014년~현재 ㈜톨레미시스템 개발
본부장
관심분야: Software Engineering, Simulator, VR based Training System, Modelling & Simulation
문 두 환
1999년 고려대학교 기계공학과 학사 2001년 한국과학기술원 기계공학과
석사
2006년 한국과학기술원 기계공학과 박사
2006년~2010년 한국해양연구원 선임연구원
2010년~현재 경북대학교 정밀기계 공학과 부교수
관심분야: Computer-aided design, Industrial data standards for product data exchange, Product lifecycle management, Knowledge- based engineering, VR for En- gineering Applications
정 교 일
1981년 한양대학교 전자공학과 학사 1983년 한양대학교 대학원 전자계
산학과 석사
1997년 한양대학교 대학원 전자공 학과 박사
1981년~현재 한국전자통신연구원 책임 연구원
2007년~현재 대검찰청 디지털수사 자문위원
2011년~현재 국방부 정보화기획관 자문위원
관심분야: IT-융합(국방, 방재 등), 정보 보완
윤 청
1979년 서울대학교 물리학과 학사 1983년 일리노이 주립대학교 전산
학 석사
1988년 Northwestern 대학교 전산학 박사
1983년~1985년 Wayne 주립대학교 전산학과 전임강사
1985년~1987년 Northwestern 대학 교 전산학과 전임강사
1988년~1993년 Bell 연구소 선임 연구원
1993년~현재 충남대학교 컴퓨터 공학과 교수
관심분야: Software Engineering, Modelling & Simulation