논문 2013-50-1-31
매입형 영구자석 동기전동기의 약계자 제어에 따른 전자기적 특성 연구
( Study on The Electromagnetism of Interior Permanent Magnet Synchronous Motor due to Field Weakening )
권 순 오
**( Soon-O Kwon )
요 약
본 논문에서는 IPMSM(Interior Permanent Magnet Synchronous Motor)의 약계자 제어에 따른 전자기적특성을 다룬다.
IPMSM의 운전 속도 영역을 확장하기 위해 약계자 전류제어가 일반적으로 사용되며 약계자 운전 중에는 전기강판의 자기적 포화에 의해 쇄교자속의 왜형이 발생하게 된다. 따라서 정현파 전류 입력을 위한 전압 파형은 왜형을 갖게 된다. 약계자 전 류 증가에 따라 이러한 전압 왜형은 더욱 크게 발생되며 기본파 전압에 비해 상당한 크기의 고조파 전압을 필요로 하게 된 다. 이러한 현상을 2차원 유한요소 해석을 이용하여 확인하였으며 시험을 통해 검증하였다. 본 연구 결과를 통해 IPMSM의 특성 분석에 사용되는 d-q축 등가회로 파라미터 즉, 영구자석에 의한 쇄교자속, d-q축 인덕턴스는 산정 단계에서 기본파 물 리량으로 계산되므로 약계자 운전시 발생하는 전압 왜형을 예측할 수 없음을 알 수 있다. 결국 주어진 전압에서 얻을 수 있는 속도 예측에 오차를 수반하게 되며 전압고조파에 대한 대책이 필요하다.
Abstract
This paper deals with electromagnetic characteristics of IPMSM (Interior Permanent Magnet Synchronous motor) caused by field weakening current control. In order to extend operation speed, field weakening current control is generally used in IPMSM operation. During field weakening, distorted linkage fluxes are resulted by saturation of core material. Therefore, distorted input voltage waveform is required for sinusoidal current input. As the current vector angle increases for field weakening, distortion of linkage flux and back-emf becomes significant. This situation is analyzed by 2-dimensional finite element analysis and verified by experiment. With the results, it is concluded that motor parameters, such as linkage flux by permanent magnet, phase resistance, d-q axis inductance, are insufficient for estimating required voltage for given speed especially in field weakening and additional considerations for increased harmonics of voltage are required.
Keywords: IPMSM, current vector control, field weakening
Ⅰ. 서 론
매입형 영구자석 동기전동기(IPMSM, Interior Permanent Magnet Synchronous Motor)은 토크 밀도, 운전 속도 영역, 효율 등에서 유도전동기, BLDC 전동
* 정회원, 한국생산기술연구원
(Korea Institute of Industrial Technology) 접수일자: 2012년11월9일, 수정완료일: 2013년1월3일
기, 릴럭턴스 전동기 등에 비해 장점을 갖는다. 따라서 소형 가전에서부터 자동차에 이르기까지 그 활용 영역 은 점점 증가되고 있다. IPMSM의 장점은 특히 견인용 전동기에 효과적이며 전기 자동차에 널리 적용되고 있 다. IPMSM을 견인용 전동기에 적용 할 경우 운전 속 도 영역 증대를 위해서 약계자 운전이 적용되는데 약계 자 운전구간에서 운전 속도 증가에 따라 예상된 속도 또는 출력을 만족하지 못하게 되는 경우가 발생하게 된
다[1~2]. 이러한 현상은 유한요소 해석을 통해 정확히 해 석이 가능하지만 다양한 부하 조건 및 제어 기법에 해 당되는 결과를 유한요소해석으로 얻기에는 현실적으로 어려움이 있다. d-q축 등가회로 시뮬레이션은 다양한 부하조건 및 제어 기법에 따른 특성을 빠른 시간에 얻 을 수 있으므로 전동기 성능 평가에 효과적으로 적용될 수 있다. 그러나 정현파의 전압, 전류, 쇄교자속을 가정 한 d-q축 등가회로 시뮬레이션 결과로 얻은 최대 운전 속도는 실제로는 구현 할 수 없거나 시뮬레이션 결과보 다 많은 약계자 전류가 필요하게 된다. 본 논문에서는 정현파 전류 인가 시 IPMSM의 전류위상 증가에 따른 전자계 해석을 통해 쇄교자속과 전압 파형을 분석하여 d-q축 등가회로에서는 표현되지 않는 속도예측 오차의 원인을 확인 하였다.
Ⅱ. 본 론
1. IPMSM의 d-q축 등가회로
IPMSM의 특성해석에는 3상을 d-q축으로 변환한 d-q 모델이 일반적으로 사용되며 그림 1은 d-q축 벡터 도를 나타낸다[3]. 입력전류 Ia가 β 의 위상각으로 2사 분면에 위치할 때 영구자석에 의한 자계와 전기자 반작 용 자계에 의해 합성 자속인 ψo 가 d-q 평면의 1사분 면에 만들어지고 ψo에 의한 부하 역기전력(Vo)은 2사 분면에 위치한다. Vo에 저항의 전압 강하 성분이 추가 된 전압 Va가 표현되며, Va는 Ia를 인가하기위해 필요한 입력 전압을 의미한다.
IPMSM의 전류 위상제어에서 전류 위상(β )는 자극 의 중심축인 d축에서 회전방향으로 전기각으로 90° 앞 선 축인 q축에서의 전기각을 나타내며 4극 IPMSM에서
Ψa
L iq q
L id d
Ψ0
R ia a
Va
V0
id
iq
Ia
d-축 q-축
β
그림 1. IPMSM의 벡터 다이어그램 Fig. 1. Vector diagram of IPMSM.
S S
N
N S
S
N N
q d
ß ?
그림 2. 전류 위상(β ) Fig. 2. Current vector angle.
전기자의 기자력, 전류위상, 회전자의 자극의 관계는 그 림 2와 같다.
철손을 무시한 경우의 IPMSM의 특성을 나타내는 전압 방정식은 (1)∼(4)와 같다. 이때 각 물리량은 이상 적인 정현파에서 가정된다. 따라서 약계자 구간의 운전 조건에서 계산된 전압은 기본파 전압을 나타낸다.
0 0 0 0
d a d od d d
q a q oq q q
v R i v L i
v R i v p L i
⎡ ⎤ = ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ + + ⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (1)
0 0
0
od q d
oq d q a
v L i
v L i
ω
ω ωψ
⎡ ⎤ = ⎡ − ⎤ ⎡ ⎤ + ⎡ ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ (2)
0
0 0
od d d a
oq q q
L i
L i
ψ ψ
ψ
⎡ ⎤ ⎡ = ⎤ ⎡ ⎤ ⎡ ⎤ +
⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (3)
( )
(
a q d q d q)
T = P ψ i + L − L i i (4)
여기서, vd, vq는 d-q축 입력전압, Ra는 상저항, vod, voq는 부하시 d-q축 역기전력, p는 시간 미분(d/dt), Ld, Lq는 d-q축 인덕턴스, id, iq는 d-q축 전류, ω는 전기각 속도, P는 극쌍수를 각각 나타낸다.
2. 유한요소 해석 모델
전류위상에 따른 IPMSM의 자기적 특성을 해석하기 위해 2차원 유한요소 해석이 사용되었다. 해석에서 전 류는 이상적인 정현파로 가정하였다. 대상전동기의 주 요 사양은 표 1과 같으며 그림 3에는 고정자와 회전자 코어 형상을 나타내었다.
그림 4는 대상 전동기에 사용된 전기강판의 B-H 커 브를 나타낸다. 가로 축은 자계의 세기를, 세로축은 자
모터 타입 IPMSM
정격출력(W) 180
극수/슬롯수 4/6
정격속도 (rpm) 4000
고정자외경/회전자외경(mm) 117/64
적층길이(mm) 45
Ra (ohm) 1.2
Ψa(Wb) 0.103
표 1. 대상 모터의 주요 사양 Table 1. Specification of test motor.
그림 3. 대상 전동기의 고정자, 회전자 코어형상 Fig. 3. Stator and rotor core.
0 10000 20000 30000 40000 0.0
0.5 1.0 1.5
B(T)
H (A/m)
그림 4. 35PN230의 B-H 특성 Fig. 4. B-H curve of 35PN230.
속밀도를 나타내며 자계의 세기는 입력 전류로, 자속 밀도는 권선 쇄교자속량 또는 전압으로 치환이 가능하 다. B-H 커브로부터 낮은 자계의 세기 또는 전류에서 는 선형적인 자속 또는 전압 파형을 얻을 수 있지만, 기 자력이 약 20000A/m 이상인 영역에서는 정현적인 전류 를 얻기 위해서 왜형된 전압이 필요하다는 것을 예측
Stator
Rotor PM
a -a
-b
b c
-c
그림 5. 2D FEM 모델 Fig. 5. 2D FEM model.
할 수 있다.
그림 5는 전자계 유한요소 해석을 위한 모델 및 요소 분할을 나타낸다. 주기성에 의해 해석은 1/2 모델링을 하였다. 코깅토크와 역기전력 THD(Total Harmonic Distortion)를 저감하기 위해 고정자의 치는 Tapering 형상이 적용되었다.
3. 2D FEM 결과 및 시험을 통한 검증
가. 무부하 선간역기전력
IPMSM을 제어함에 있어서 무부하 역기전력 파형은 제어의 용이성을 판단하는 근거로 이해되고 있다. 즉 무부하 역기전력이 정현파에 가까울수록 IPMSM 제어 가 용이하다. 그림 6은 대상 전동기의 무부하 선간 역 기전력 측정 파형을 나타낸다. 무부하 역기전력은 전동 기 입력단이 개방된 상태에서 외부에서 회전자 축을 1,000rpm으로 회전시키고 이때의 선간 역기전력을 측정
0 60 120 180 240 300 360
-50 -25 0 25 50
Line-line back emf (V)
Electric angle (deg.)
그림 6. 무부하 선간역기전력 파형(1000rpm, 25oC) Fig. 6. No-load line-line back emf waveform.
(1000rpm, 25oC)
0.71 T 0.76 T
그림 7. 무부하 자계 분포
Fig. 7. Magnetic field distribution at no-load.
하여 얻었다. 이때 역기전력 파형은 Furie 급수전개를 이용한 고조파 분석을 통해 THD가 약 0.3%로 이상적 인 정현파에 근접한다.
그림 7은 무부하시 자계 분포를 나타낸다. 최대 자속 밀도는 0.78T로 그림 4의 B-H 커브에서 선형적인 영역 에 있다. 따라서 무부하 역기전력은 정현파에 가까운 결과를 나타낸다.
나. 부하시 역기전력
부하시험은 그림 8에 나타낸 구성으로 500rpm, 2A에 서 전류 위상이 0∼80°까지 20° 단위로 시험을 수행하 였다. 시험 시 입력 전류 파형은 전류의 THD가 2% 이 내로 정현파에 가깝게 인가되었다. 각 시험 조건에서 인버터에서 선간전압과 선간전류를 각각 측정하여 데이 터를 저장 한 후 기본파에 대해서 11 고조파 까지의 데 이터를 취하고 그 이상의 고조파 데이터는 배제하였다.
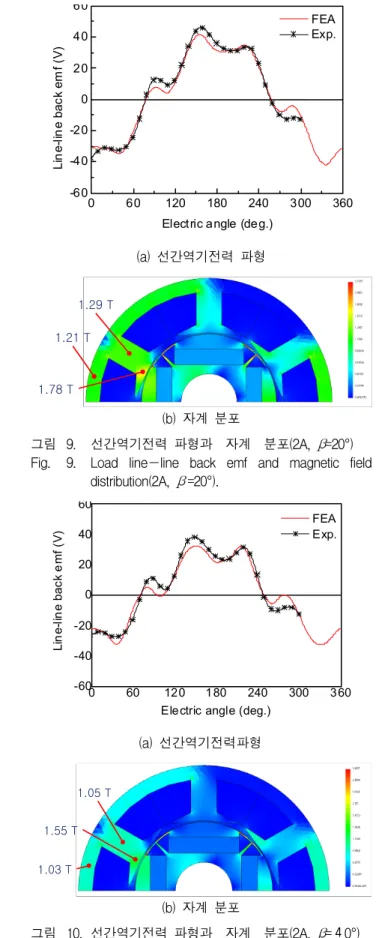
그림 9는 전류 위상이 20°인 경우 선간역기전력파형 의 비교를 나타낸다. 무부하와는 다르게 선간 역기전력 파형이 왜곡된 형태를 갖는다. 이때 시험치의 기본파 값은 37.13V이고 고조파를 포함한 경우는 50V의 피크 값을 갖는다. d-q축 등가회로에서는 기본파를 전제로 하기 때문에 기본파 전압만으로 전압을 계산하게 되면 실제로는 순간적으로 50V를 필요로 하기 때문에 시험
Test
Motor Dynamo
- meter 3-phase
Inverter Controller Power supply
Power Analyzer
Oscilloscope PC
그림 8. 부하 시험 구성 Fig. 8. Test setup for load test.
0 60 120 180 240 300 360
-60 -40 -20 0 20 40 60
FEA Exp.
Line-line back emf (V)
Electric angle (deg.) (a) 선간역기전력 파형
1.29 T 1.21 T
1.78 T
(b) 자계 분포
그림 9. 선간역기전력 파형과 자계 분포(2A, β=20°) Fig. 9. Load line-line back emf and magnetic field
distribution(2A, β =20°).
0 60 120 180 240 300 360
-60 -40 -20 0 20 40 60
FEA Exp.
Line-line back emf (V)
Electric angle (deg.)
(a) 선간역기전력파형
1.55 T 1.05 T
1.03 T
(b) 자계 분포
그림 10. 선간역기전력 파형과 자계 분포(2A, β=40°) Fig. 10. Load line-line back emf and magnetic field
distribution (2A, β =40°).
에서 주어진 조건 즉 500rpm, 2A, β =20° 조건의 운전 을 할 수 없게 되거나 정현파 전류 인가가 불가능 하다 는 것을 알 수 있다. 고정자의 치 끝단에서 1.78T의 자속 밀도를 가지므로 무부하에 비해 국부적으로 자기 적인 비선형 영역에서 동작하고 있다.
그림 10은 β 가 40°인 경우의 부하시 역기전력 파형 과 자계 분포를 나타낸다. 20°에 비해 역기전력의 고조 파는 다소 증가하였으며 기본파의 크기는 30.36V로 감 소하여 전류 위상 증가에 따른 약계자의 효과를 확인 할 수 있다. 약계자 효과로 인해 기본파의 전압 및 자속 량은 β 가 20°인 경우에 비해 감소하였지만 고조파 성 분에 의해 동일한 회전자 위치에서 치와 요크의 자속 밀도는 전체적으로 증가하였다.
그림 11은 β 가 601°인 경우의 부하 시 역기전력 파 형과 자계 분포를 나타낸다. 기본파 전압은 20.3V로 β 가 40°인 경우에 비해 더욱 작아졌다.
그림 12는 β가 80°인 경우의 부하 시 역기전력 파형 과 자계 분포를 나타낸다. 기본파 전압은 8.3V로 약계 자 영향이 60°에 비해 커져서 역기전력이 감소하였지만
0 60 120 180 240 3 00 360
-30 -20 -10 0 10 20
30 FEA
Exp .
Line-line back emf (V)
Electric an gle (deg .)
(a) 선간역기전력 파형
1 .0 T 0 .6 9 T
0 .6 3 T
T H D :4 2 .2 %
(b) 자계 분포
그림 11. 선간역기전력 파형과 자계 분포(2A, β=60°) Fig. 11. Load line-line back emf and magnetic field
distribution(2A, β=60°).
그 크기는 고조파를 포함한 값의 절반 수준으로 고조파 의 영향이 더욱더 커졌다. 치와 요크의 자속밀도는 전 반적으로 60°인 경우에 비해 감소하였지만 영역에 따라 감소하는 정도가 다르게 나타났다. 따라서 (1)∼ (4)의 전압 방정식으로부터 약계자 성능과 운전 속도를 계산 한다면 실제 운전 속도와 비교해서 그 오차는 더욱더 커지게 됨을 알 수 있다.
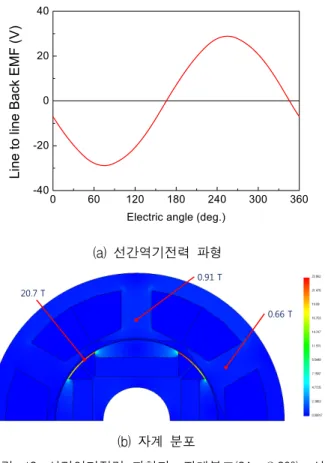
그림 13은 전류 2A, 전류위상 80° 조건에서 전기강 판의 자기적 특성을 선형으로 가정한 선형 해석 결과를 나타낸다. 전기강판의 비 투자율은 1000으로 설정하였 다.비선형 해석에서는 약 2.5T였던 리브영역에 대부분 의 자속이 통과하므로 리브 영역의 자속 밀도가 20.2T 로 극단적으로 높아지는 결과가 나타났다. 선간 역기전 력 파형은 비선형을 반영한 경우와는 다르게 정현적으 로 나타나 역기전력 고조파는 전기강판의 비선형성이 원인임을 알 수 있다.
표 2에 각 운전 조건에서 기본파 전압과 고조파를 포 함한 전압의 크기를 비교하였다. 고조파를 포함한 실효 치 전압은 전류 위상에 따라 증가하는 형태를 확인 할
0 100 200 300 400
-16 -8 0 8
16 FEA
Exp.
Line-line back emf (V)
Electric angle (deg.)
(a) 선간역기전력 파형
0.92 T 0.32 T
0.17 T
(b) 자계 분포
그림 12. 선간역기전력 파형과 자계 분포(2A, β=80°) Fig. 12. Load line-line back emf and magnetic field
distribution(2A, β=80°).
0 60 120 180 240 300 360 -40
-20 0 20 40
Line to line Back EMF (V)
Electric angle (deg.)
(a) 선간역기전력 파형
0.66 T 0.91 T
20.7 T
(b) 자계 분포
그림 13. 선간역기전력 파형과 자계분포(2A, β=80°)-선 형해석
Fig. 13. Load line-line back emf and magnetic field distribution(2A, β=80°) - linear analysis.
500rpm, 2Arms 20 (deg.)
40 (deg.)
60 (deg.)
80 (deg.)
기본파 선간 역기전력 (Vrms)
Exp. 27.15 21.47 14.34 5.88 FEA 26.16 20.71 13.81 6.32 Error(%) 3.78 3.67 3.84 -7.0 고조파를 포함한 실효치
선간 역기전력(Vrms)
Exp. 27.72 22.26 15.24 7.06 FEA 26.75 21.56 14.85 7.58
표 2. 전류위상에 따른 선간역기전력
Table 2. Line-line back emf according to current vector.
수 있으며 유한요소 해석으로 실제 현상에 근접한 결과 를 얻을 수 있었다. 이때 실효치 전압에서는 큰 차이를 나타내지 않는 것처럼 보이지만, 순시 값에서는 그림 12에서처럼 기본파와 고조파를 포함한 전압은 현저하게 큰 차이를 갖는다.
IPMSM의 고성능 제어를 위해 퍼지 제어[4], RBF 신 경회로망 관측기 활용[5] 등 다양한 제어 기법이 제안되 고 있으나 고조파성분 전압의 영향이 크게 나타나 정현
파 전류 인가에 필요한 전압이 전원 전압을 초과하는 경우에는 고성능 제어에 한계가 있다.
Ⅲ. 결 론
전류 위상에 따른 IPMSM의 전자기적 특성을 유한 요소 해석과 시험을 통해 확인 하였다. 전류 위상이 증 가 할수록 부하 시 역기전력의 고조파는 증가함을 확인 하였으며 이는 정현파 전류를 가정하고, 전류 위상 제 어를 적용하는 IPMSM의 동작에서 전류 위상 증가에 따라 필요한 전압 고조파가 커짐을 의미한다. 따라서 현재의 기본파를 가정한 d-q 축 등가회로로 약계자 운 전에서 전압 또는 운전 속도 예측할 때 큰 오차가 예상 된다. 따라서 IPMSM의 약계자 운전 시 증가하는 전압 고조파에 대한 대책이 필요하다. 전압고조파에 대한 대책으로는 자기회로 설계 시 전압 마진을 충분히 주는 방법, 약계자 운전 구간에서 전압 고조파를 저감하는 설계, d-q축 등가회로 해석에서 고조파 성분의 전압을 고려하는 방법이 있다.
참 고 문 헌
[1] B. H Lee et al., “Modeling of Core Loss Resistance for d-q Equivalent Circuit Analysis of IPMSM considering Harmonic Linkage Flux”, IEEE Trans. on Magn., Vol.47 , May 2011.
[2] S.H Han et al., “Reducing harmonic Eddy- current losses in the stator teeth of interior permanent magnet synchronous machines during flux weakening”, IEEE Trans. Energy Convers.
vol. 25, no. 2, pp. 441∼449, June 2010.
[3] 武田洋次, “埋入磁石同期モ一タの設計と制御”, OHM社, 2002.
[4] 이정철 외,“IPMSM 드라이브의 고성능 제어를 위한 새로운 퍼지제어기”, 전자공학회논문지 제40 권 SC편 제3호, pp.107∼115, May 2003.
[5] 김은태 외, “RBF 신경회로망을 이용한 교류 동기 모터의 강인 속도 제어”, 전자공학회논문지 제40권 SC편 제4호, pp. 19∼26, July 2003.
저 자 소 개 권 순 오(정회원)
2003년 창원대학교 전기공학 학사
2005년 창원대학교 전기공학 석사
2011년 한양대학교 자동차공학 박사
2011~현재 한국생산기술연구원 선임연구원
<주관심분야 : 전기자동차 구동용 모터, 전자계 해석 설계>