다중경로 신호의 도달 주파수와 시간 차를 이용한 수중음원 거리 추정 연구
손윤준*, 손기중
국방기술품질원
A Study on The Range Estimation of Underwater Acoustic Source using FDOA and TDOA of Multipath Signals
Yoon-Jun Son*, Gi-Joong Son
Naval Sea Systems Center, Defense Agency for Technology and Quality
요 약 수중에서는 공기 중에서의 신호 전달과는 달리 음파에 의해 신호가 전달된다. 또한 음파는 해수면, 해저면, 수온,
염분 등 다양하고, 복잡한 수중 환경 특성으로 인해 직접 혹은 반사 등의 간접 경로로 전달된다. 이런 복잡한 수중 환경 에서 잠수함의 생존성과 적 함정으로부터 피탐 위험성의 정도를 파악하기 위해 반드시 수행하는 시험이 수중방사 소음 측정 시험이다. 수중방사 소음 측정을 위한 여러 조건들 중 가장 중요한 것이 측정 센서와 잠수함과의 거리이다. 보통 수중방사 소음의 음원 준위 측정은 측정 센서와 잠수함과의 최근접 점(CPA : Closet Point of Approach) ±수 미터 내에서 이루어져야 측정한 음원 준위 값을 유효한 것으로 간주한다. 이에 본 연구에서는 다중 경로 신호들의 도플러 천이 주파수 및 다른 도달 시간 차 신호를 추정하는 방법으로 수중음원에 대한 거리 추정 방법을 제시하였다. 제안한 방법의 타당성을 고찰하기 위해 수중 채널 전달 모델 기반의 모의실험을 수행하였다.
Abstract Underwater, signals are transmitted by sound waves. Sound waves are transmitted through a
multipath, either directly or through reflection, due to the variety of underwater environmental characteristics. In such diverse and complex underwater environments, tests must be conducted to determine the extent of the hazard from the survivability and pitfalls of submarines by measuring the underwater radiated noise. Usually, the sound source level measurement of underwater radiated noise should be made within the closest point (CPA: Closest Point of Approach) ± a few meters between the measurement sensor and the submarine. In this study, FDOA and TDOA methods were proposed to estimate the underwater source range. A simulation based on the underwater channel model confirmed the performance of the proposed method.
Keywords : FDOA, TDOA, CPA, Doppler Frequency, Range Estimation
*Corresponding Author : Yoon-Jun Son(Defense Agency for Technology and Quality) email: [email protected]
Received October 6, 2020 Revised November 3, 2020 Accepted February 5, 2021 Published February 28, 2021
1. 서론
수중에서는 공기 중에서의 신호 전달과는 달리 음파에 의해 신호가 전달된다. 또한 음파는 해수면, 해저면, 수 온, 염분 등 다양하고, 복잡한 수중 환경 특성으로 인해 직접 혹은 반사 등의 간접 경로로 전달된다.
이런 다양하고 복합한 수중 환경에서 잠수함의 생존성 과 적 함정으로부터 피탐 위험성의 정도를 파악하기 위 해 반드시 수행하는 시험이 수중방사 소음 측정 시험이 다. 우리나라 잠수함의 수중방사 소음에 대한 음원 준위 측정은 측정 센서를 일정 수심에 내려놓고, 잠수함이 잠 항 후 측정 센서 주위를 직선으로 기동하면서 측정하게
되는데 측정 센서의 최근접 점 ±수 미터 내로 기동해야 만 측정한 음원 준위 값(협대역 주파수)을 유효한 것으로 간주한다. 일반적으로 수상함에서 거리에 대한 조건들을 만족하기 위한 여러 시험 항목에서는 GPS, Radar 정보 를 사용한다. 하지만 수중에서는 전파의 전달 특성으로 인해 GPS 혹은 Radar 정보를 이용할 수가 없다. 이에 본 연구에서는 수중음원의 거리 추정을 위해 다음과 같 은 방법을 제시하였다. 이미 알고 있는 신호를 설계하여 이 설계된 신호를 수중음원으로부터 송신할 경우 수중음 원의 이동으로 인해 도플러 효과가 발생한다. 또한 수중 음파 전달 특성상 발생하는 다중 경로로 인해 수신 센서 측면에서는 경로에 따라 다른 도플러 천이 주파수 및 다 른 도달 시간 차를 갖는 신호를 수신하게 된다. 따라서 서로 다른 도달 도플러 천이 주파수와 서로 다른 도달 시 간 신호들의 차이를 추정하고, 기 알고 있는 측정 조건 정보들 즉, 수신 센서 위치, 수중음원 속도, 이동 경로 정 보들을 이용하여 이론적으로 계산된 도플러 천이 주파수 및 도달한 신호들의 시간 차이를 상호 비교하여 그 결과 값이 최소가 되는 지점을 수중음원의 거리로 추정하는 것이다[1-4].
2. 본론
본 연구에서 제시하는 수중음원 거리 추정에 대한 연 구 절차는 먼저 수중에서의 능동 신호에 대한 특성을 이 론적으로 분석하고, 다중경로에 대한 신호 전달 체계를 기하학적으로 분석 및 설계하여 수중 채널 전달 모델에 기반한 모의실험을 통해 연구에 대한 효과성을 검증하였다.
2.1 모호 함수를 이용한 도플러 천이 주파수 및 시간 차 추정
능동 신호에 대한 정보를 분석할 때 그 정보는 송신하 는 신호의 특성에 의해 일정한 한계를 갖게 된다. 이러한 한계는 신호의 모호 함수에 의해 설명되어 질 수 있는데 수신측에서 송신한 신호의 유무를 판별하기 위해서는 이 미 약속된 신호가 수신될 때 큰 출력을 내주는 정합 필터 (Matched filter)를 사용하게 된다. 정합 필터는 그 구조 가 상관기(Correlator)와 같다. 즉 수신된 신호와 분석하 고자 하는 신호의 복제된 형태인 replica 사이의 상호 상 관도를 구한 후, 그 출력으로 신호를 확인하는 것이다. 상 호 상관기(Crosscorrleator) 출력의 절대값을 시간 지연
과 도플러 천이 주파수의 변화에 따라 관찰한 것이 모호 함수이다. 수신 신호를 검출하기 위한 정합 필터 출력 식 은 아래와 같다.
∞∞
∞∞
(1)
여기서, 는 송신 신호이고, 는 수신신호,
는 단방향 전송에 있어서 시간 압축 인수, 는 상 대속도, 는 음파 전달 속도, 는 시간 지연을 의미한다.
수신 신호는 송신측과 수신측 사이의 상대적인 속도에 따라 시간 압축 인수 에 의해 압축 혹은 확장되고, 거리 에 따라 송신 시점부터 만큼 시간 지연된다. 식 (1)은
와 의 함수가 되는데, , 으로 완전히 정합 될 때 최대값을 가진다. 식 (1)의 함수 크기 혹은 크기의 제곱을 모호 함수라고 하며, 다음과 같이 표현할 수 있다.
∞
∞
(2)여기서, 시간 지연 는 시간축 평행 이동만을 나타내므 로 모호 함수를 주로 관찰하기 위해서 일반적으로 는 0으로 설정한다. 가 협대역(narrowband) 신호라면 도플러 효과는 주파수 천이로 근사 시킬 수 있으므로, 식 (2)는 수신 신호의 모양은 그대로 두고 시간 압축 인수인
에 관한 항을 도플러 주파수 천이 항으로 표현하면 다 음 식과 같다.
∞
∞
exp
∞∞ exp
(3)
위 식에서 는 신호의 중심 주파수 혹은 변조 되었을 때의 전송 주파수를 의미하며, 는 도플러 주파수 를 나타낸다. 모호 함수는 두가지 특성을 갖는데 첫 번째 는 다음 식과 같다.
≤
(4) 위 식에서 함수는 입력 신호와 replica의 파형이 똑같 은 때인 , 에서 최대값을 가지며, 그 값은 신호의 에너지
로 주어진다. 두 번째 특성은 아래 식으 로 나타낼 수 있다.
∞∞
∞
∞
(5)이 특성은 모호 함수 제곱의 전체 부피는 신호의 에너 지 제곱과 같다는 것이다.
2.2 다중 경로 신호의 도달 주파수 및 시간차를 이용 한 수중 음원 거리 추정
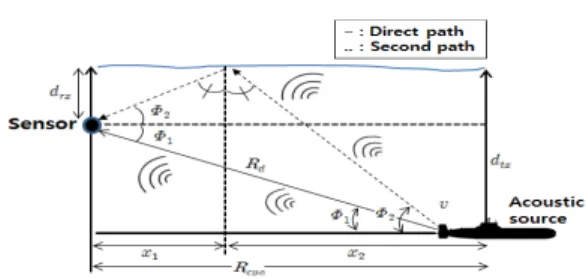
도플러 천이 주파수는 음원과 수신 센서의 상대속도에 따라 신호의 주파수가 달라지는 현상이다. Fig. 1은 수평 면 상에서의 이동하는 음원과 단일 고정 센서에 대한 도 플러 천이 주파수의 기하학적인 구조를 표현한 것이다.
Fig. 1. Geometric structure of doppler shift for receive sensor
Fig. 1과 같이 속도 로 이동하는 수중음원과 단일 고 정 센서 사이의 도플러 천이 주파수 식은 다음과 같다.
cos (6)
여기서, 는 송신 신호의 중심 주파수이며, 는 이동하 는 수중음원과 고정 센서간의 각도이다. 하지만 앞서 서 론에서 기술하였듯이 수중에서는 위와 같이 직접 전달되 는 신호 이외에 해수면 혹은 해저면에 의해 반사되어 들 어오는 Second pass 또한 존재한다. 상대적으로 깊은 수심으로 인해 해저면에 의한 반사를 무시할 수 있다고 가정하고, 해수면 또한 바람에 의한 큰 변동 없이 평평하
다고 했을 때 해수면으로부터 반사되어 수신되는 신호의 기하학적인 구조는 Fig. 2와 같다.
Fig. 2. Geometric structure of multipath doppler shift frequency for receive sensor
여기서, 은 이동하는 수중 음원과 고정된 센서간의 각 도이고, 는 이동하는 수중 음원에서 송신된 신호가 해 수면을 맞고 수신 센서로 입사될 때의 각도를 의미한다.
해수면에 맞고 반사되어 수신되는 신호의 도플러 천이 주파수 식은 아래와 같이 표현할 수 있다.
sec cos (7)
Fig. 2에서 cos의 값은 와 같은 각을 이루고 있 는 두 개의 삼각형 비율을 통해 구할 수 있다.
(8)
여기서, 는 해수면에서 수신 센서까지의 수심을 나타 내고, 는 해수면에서 수중 음원까지의 수심을 의미한 다. cos의 값을 구하기 위해 을 이용하면 다음 식과 같이 나타낼 수 있다.
tan
cos costan
(9)
위 식에서 구해진 cos를 식(7)에 대입하면 해수면 에서 반사되어 들어오는 도플러 천이 주파수 식은 아래 와 같이 정의될 수 있다.
sec cos tan
(10)
다음으로 다중 경로에 의해 수신 센서로 들어오는 신 호들의 시간 차를 추정하는 방법은 다음과 같다.
Fig. 3. Geometric structure of multipath time difference of arrival for receive sensor Fig. 3은 수신 센서 측면에서 다중 경로 도달 시간 차 의 기하학적인 구조를 나타낸다.
이동하는 수중 음원으로부터 수신 센서에 직접 전달되 는 거리는 아래와 같은 식으로 구할 수 있다.
(11)여기서,
는 수중 음원이 위치한 수심에서 수 신 센서가 위치하는 수심을 뺀 값이고,
는 수중 음원 이 수신 센서까지 수평으로의 최근접 거리를 의미한다.다음으로 해수면에 반사된 후 수신 센서로 입사되는 간 접 경로의 의해 전달되는 신호의 거리는 다음 식으로 정 의할 수 있고, 간접 경로에 의해 전달되는 신호에 대한 거리는 삼각형의 닮은꼴을 이용하여 구할 수 있다.
sec
(12)식 (11), (12)에 의해 구해진 값을 통해 다중 경로의 의해 전달되는 신호의 시간차를 구하는 최종 식은 다음 과 같다.
sec
(13)2.3 모의실험 및 결과
제안한 방법의 성능을 확인하기 위해 실제 해양에서
측정된 음속 분포를 미국 스크립스 해양연구소가 개발하 여 공개한 벨합 기반 수중채널 모델링 프로그램인 VirTEX(Virtual time series experiment) 시뮬레이터 (PC환경)에 적용하여 성능을 고찰하였다. 모의실험을 위 해 실제 동해에서 측정된 음속 구조(Sound speed profile)를 이용하여 실험 환경을 구성하였고, 해수면과 해저면은 평탄하다는 가정을 하였다. 또한 해저면 정보도 실제 동해에서 측정된 데이터를 이용하였다.
모호 함수를 이용하여 도플러 천이 주파수 추정을 위 해 수중 음원의 송신 신호는 63 Bits m-sequence를 BPSK로 변조, 송신 신호 대역폭은 1[kHz] 및 샘플링 주 파수는 각각 30, 120[kHz]를 사용하였다.
Table 1. Characteristics of underwater environment variables, receive sensor and acoustic source in simulation
구 분 변 수 값 비 고
해양환경
음속 1475[m/s]
동해 해저면 측정값 사용 밀도 1.145[g/cm3]
감쇄계수 0.09[dB/λ]
수심 400[m]
수중음원 수심 50[m] 수심 50[m]에서
수평으로만 이동 속도 5, 10[knot]
수신센서 수심 50[m] -
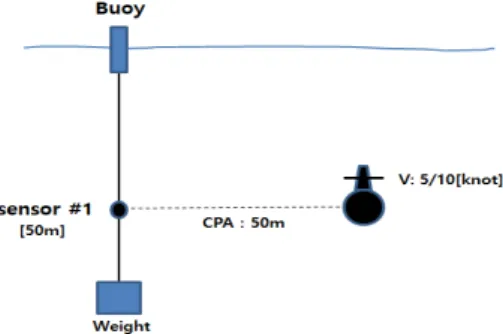
Table 1은 모의실험에서 사용한 해양환경, 수중음원, 수신센서 변수 정보들을 나타내고, Fig. 4는 모의실험에 서 수중에서 잠수함이 직선 기동하는 개념도이다. 모의실 험에서 사용한 수중음원의 수심 및 속도와 수신센서의 수심은 수중방사 소음을 측정하는 장보고급 잠수함에서 수중방사 소음을 측정하는 시험평가 방법과 유사하게 시 나리오 환경을 구성하였다.
Fig. 4. Simulation concept
0 20 40 60 0
100 200 300
400
Range (m)
Depth (m)
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
arrival time (sec)
amplitude
(b)
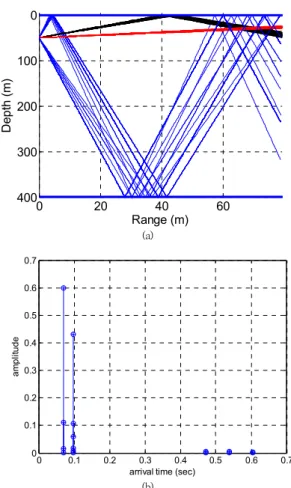
Fig. 5. Simulation channel characteristic of between receive sensor and acoustic source,
(a) eigen-rays, (b) channel impulse response
Fig. 5는 동해에서 측정된 데이터를 시뮬레이터를 이 용하여 수중 음원 수심에서 음선 분포 및 채널응답 특성 (직접전달, 해수면 반사)을 나타낸다.
Fig. 6. Ambiguity function result of target(5[knot]) signal of 50[m] range from CPA
Fig. 7. Ambiguity function result of target(10[knot]) signal of 50[m] range from CPA
Fig. 6, 7은 모의실험 시나리오에서 수중 음원이 5, 10[knot]의 속도로 CPA로부터 50[m] 떨어져 기동할 때 직접 경로와 해수면 반사의 간접 경로로 수신센서에 수 신되는 신호의 도플러 천이 주파수 결과를 나타낸다. 즉 이것은 수중에서 다중 경로 신호의 존재를 확인할 수 있 고, 수중 음원의 속도에 따라 상호 다른 도플러 천이 주 파수 값을 나타내므로 다중 경로 신호의 수신 특성에 따 라 수중 음원의 거리 추정이 가능함을 유추할 수 있다.
Fig. 8. Flow chart that the range estimation of underwater acoustic source using FDOA and TDOA of multipath signal
본 연구에서 제시하는 방법의 시뮬레이션 개념도는 Fig. 8과 같이 표현할 수 있다. 수중 음원에서 송신되는 직접 전달 신호와 해수면에서 반사되어 들어오는 두 번 째 신호 두가지에 대해 도플러 천이 주파수와 도달 시간 차를 구하고, 이 값과 이론적으로 계산된 도플러 천이 주 파수 및 시간 차의 값을 상호 비교하여 가장 작은 오차를 나타내는 지점을 수중 음원이 위치한 거리로 추정하는
것이다. 물론 위와 같이 비교하기 위해서는 앞서 설계한 신호를 수중 음원에서 송신하고, 수신센서 위치, 수중 음 원의 이동 속도 및 경로는 알고 있다는 가정하에 이루어 지는 것이다.
50 55 60 65 70
0 5 10 15 20 25 30 35 40
Range of transmitter [m]
Doppler frequency difference [Hz]
Calculated Doppler frequency Estimated Doppler frequency
Fig. 9. Simulation results of doppler shift frequency difference according to receive sensor(target 5[knot])
50 55 60 65 70
0 5 10 15 20 25 30 35 40
Range of transmitter [m]
Doppler frequency difference [Hz]
Calculated Doppler frequency Estimated Doppler frequency
Fig. 10. Simulation results of doppler shift frequency difference according to receive sensor(target 10[knot])
Fig. 9는 송신 신호 대역폭이 1[kHz], 수중 음원의 속 도 5[knot], Fig. 10은 송신 신호 대역폭이 1[kHz]로 같 고, 수중 음원의 속도가 10[knot] 일 때, CPA 거리 중심 에서 멀어질 때의 추정된 도플러 천이 주파수와 이론적 으로 계산된 도플러 천이 주파수를 나타낸다. 수중 음원 이 5[knot] 일 때 보다 10[knot]에서 CPA 거리 주변 오차가 줄어든 것을 확인할 수 있다. 이는 수중 음원이 빨라질수록 다중 경로 신호들 사이의 도플러 천이 주파 수의 차이가 커짐에 따라 상호간의 신호 구분이 명확해 지기 때문에 추정하는 오차는 반대로 줄어드는 것이다.
다중 경로에 의해 이론적으로 계산된 도플러 천이 주
파수와 추정된 도플러 천이 주파수간의 차이 결과 확인 에 이어 다중 경로에 의해 도달하는 신호들간의 시간 차 이의 결과도 고찰해 보았다.
Fig. 11. Simulation results of time difference according to receive sensor(target 5[knot]) Fig. 11은 송신 신호 대역폭이 1[kHz], 수중 음원이 5[knot] 속도로 CPA 거리 중심에서 멀어질 때의 추정된 도달 시간차와 이론적으로 계산된 도달 시간차를 나타낸 다. CPA 거리 50[m] 근처에서는 상호간의 차이가 거의 나타나지 않았고, CPA 거리로부터 점점 멀어지더라도 차이 없이 좋은 결과를 보였다.
Fig. 12. Simulation results of time difference according to receive sensor(target 10[knot]) Fig. 12는 송신 신호 대역폭이 1[kHz], 수중 음원이 10[knot] 속도로 CPA 거리 중심에서 멀어질 때의 추정 된 도달 시간차와 이론적으로 계산된 도달 시간차를 나 타낸다. 수중 음원이 5[knot]로 이동 했을 때와 비슷한 결과를 보였다.
본 연구에서 제안한 방법의 거리 추정 성능 확인을 위 해 도플러 천이 주파수를 보정하지 않고, 상관함수를 이 용하여 거리를 추정하는 기존의 도달 시간차 추정 방법 (Conventional method)과 비교를 해보았다.
Fig. 13은 송신 신호 대역폭이 1[kHz], 수신 센서에서
신호를 수신할 때 수중 음원의 이동 속도별 거리 추정 결 과를 나타낸다. 이동하는 수중 음원에 대해 도플러
주파수를 추정하지 않는 기존의 도달 시간차 추정 방 법은 CPA 거리 및 CPA거리로부터 멀어질수록 안정적 이지 못한 반면에, 제안한 방법은 CPA 거리부터 오차가 작고, 큰 변동 없이 거의 정확하게 수중 음원의 거리를 추정하고 있음을 확인할 수 있다.
(a)
(b)
Fig. 13. Simulation results of range estimation according to velocity of acoustic source, (a) 5[knot], (b) 10[knot]
Table 2. Average value of range estimation error between conventional method and proposed method
구 분 5[knot] 10[knot]
Conventional Method 25.5[m] 25.2[m]
Proposed Method 0.4[m] 0.7[m]
Table 2는 앞서 그림으로 확인했던 기존의 일반적인 거리 추정 방법과 본 연구에서 제안한 방법에 의해 추정 된 평균 거리 오차 값을 나타낸다. 제안한 방법과 상호 비교를 해보면 제안한 방법이 최대 95% 이상 오차가 작 아져 성능이 월등히 앞서는 것을 확인할 수 있다. 모의실
험의 결과가 좋은 이유는 해수면이 Flat 하다는 가정하에 해수면에 입사 및 반사되는 각도가 정확하게 일치하고, 또한 수중 방사 소음 측정 거리의 아주 짧은 구간 내에서 도달 신호의 주파수 및 시간 차 분해능이 아주 세밀하여 오차가 크기 않기 때문인 것으로 판단된다.
3. 결론
수중에서는 음파에 의해 신호가 전달된다. 또한 수온, 염분, 밀도 등 다양한 수중 환경의 특성으로 인해 음파는 직접 혹은 해수면 및 해저면 반사 등에 의한 간접 경로로 전달된다. 이런 복잡한 수중 환경에서 잠수함의 생존성과 적 함정으로부터 피탐 위험성 정도를 파악하기 위해 수 중방사 소음 측정은 더욱더 중요시 되고 있다.
이에 본 연구에서는 수중방사 소음 측정과 같이 근접 영역에서, 잠수함 즉, 측정하고자 하는 수중 음원의 속도, 경로, 측정에 사용되는 수신 센서 수심 등의 정보들을 알 고 있을 때 거리를 추정하는 방법을 제시하였다. 모의실 험을 통해 본 연구에서 제시한 방법의 성능을 고찰한 결 과 기존의 일반적인 거리 추정 방법에 비해 최대 95% 이 상 오차 감소를 보여 성능면에서 월등히 앞서는 것을 확 인할 수 있었고, 실제 해상 시험에서 적용할 수 있는 가 능성을 엿볼 수 있었다.
References
[1] B.S. Sharif, J. Neasham, O.R. Hinton and A.E. Adams,
"Computationally efficient doppler compensation system for underwater acoustic communications", IEEE J. Oceanic Eng., vol.25, no.1, pp.52–1, Jan. 2000.
[2] R. Diamant, A. Feuer, and L. Lampe, “Choosing the right signal: Doppler shift estimation for underwater acoustic signals,” in ACM Conference on Under Water Networks and Systems (WUWNet), Los angles, USA, Nov. 2012.
[3] O. Rabaste and T. Chonavel, “Estimation of multipath channels with long impulse response at low SNR via an MCMC method,” IEEE Transactions on Signal Processing, vol. 55, no. 4, pp. 1312–1325, Apr. 2007.
[4] S. Tao, L. Xu-Wen, C. Xiao-Ting, “Decision-directed estimation of carrier frequency and phase for burst PSK transmission,” in Proc. Int. Conf. Wireless Communications, Networking and Mobile Computing (WiCOM '09), pp.1-4, Beijing, China, Sept. 2009.
손 윤 준(Yoon-Jun Son) [정회원]
• 2003년 9월 : 한국해양대학교 전 파공학과 (공학석사)
• 2019년 2월 : 한국해양대학교 전 파공학과 (공학박사)
• 2003년 10월 ~ 2008년 10월 : 삼성탈레스 선임연구원
• 2008년 10월 ~ 현재 : 국방기술품 질원 함정3팀장
<관심분야>
Sonar 신호처리, 수중통신
손 기 중(Gi-Joong Son) [정회원]
• 1998년 2월 : 창원기능대학 생산 기계학과 (전문학사)
• 2008년 8월 : 한성대학교 경영대 학원 국방경영학과 (석사)
• 1999년 4월 ~ 현재 : 국방기술품 질원 연구원 근무중
• 2019년 8월 ~ 현재 : 국방기술품 질원 함정1팀장
<관심분야>
국방경영, 기계
![Fig. 9. Simulation results of doppler shift frequency difference according to receive sensor(target 5[knot]) 50 55 60 65 700510152025303540 Range of transmitter [m]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5335305.176429/6.799.423.703.199.372/simulation-results-doppler-frequency-difference-according-receive-transmitter.webp)
![Fig. 13. Simulation results of range estimation according to velocity of acoustic source, (a) 5[knot], (b) 10[knot]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5335305.176429/7.799.103.378.285.671/simulation-results-range-estimation-according-velocity-acoustic-source.webp)
