http://dx.doi.org/10.7839/ksfc.2018.15.4.081
소형 굴삭기의 원격제어를 위한 주행 알고리즘 및 통신특성에 관한 연구 A Study on Driving Algorithm and Communication Characteristics
for Remote Control of Mini Excavator
정진범
1․김경수
1*Jin Beom Jeong and Kyung Soo Kim
Received: 28 Aug. 2018, Revised: 12 Nov. 2018, Accepted: 26 Nov. 2018
Key Words:Remote Control(원격제어), Hydraulic Valve(유압밸브), Communication Environment(통신환경), LabVIEW(랩뷰), Construction Equipment(건설장비)
Abstract: Indoor construction site such as building demolition sites, tunnel, vinyl house, and cattle shed are subject to various risk factors such as falling stones, soot and bad odors. However, most of the mini excavators have no cabin that can protect the driver from such risk factors. Therefore, researches on remote control technology of construction equipment are actively conducted as a method for protecting the driver from the risk factors occurring in the working environment. For effective remote control, it is necessary to be able to control the travelling and work using a portable small transmitter. However, due to the limitation of the size of the transmitter, complex operation control is required to control two or more actuators with a single joystick. Also, it is essential to check how remote control characteristics change in various environments such as distance, signal strength, obstacle. Therefore, in this study, an algorithm that can control two actuators simultaneously with a single joystick signal was developed, and a communication method suitable for indoor and outdoor mini construction equipment by analyzing experimentally how the remote control characteristics vary according to various work environments and telecommunication methods proposed.
* Corresponding author: [email protected]
1 Korea Construction Equipment Technology Institute, 36 Sandan-ro, Gunsan-si, Jeollabuk-do 54004, Korea Copyright Ⓒ 2018, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. 서 론
건설기계는 토목공사나 건축공사에 사용되는 기계 의 총칭으로, 굴삭기, 로더, 크레인 및 지게차 등 종 류가 다양하며, 건설기계의 대표격인 굴삭기는 실외 및 실내 건설 현장, 농업, 임업, 조경 등 다양한 환경 에서 사용되고 있다. 특히 실내 건설 환경은 터널, 비닐하우스, 축사 및 건물 내부에서 철거 및 리모델 링 등 다양한 작업이 이루어지며 실내에서의 건설작 업은 중대형 건설기계의 진입이 어려워 3톤 미만의
소형 굴삭기를 이용하여 작업을 수행하고 있다. 이러 한 실내 건설 환경은 먼저, 돌, 매연, 악취 등 다양한 위험요인이 발생하나, 대부분의 소형 굴삭기에는 운 전자를 보호할 수 있는 캐빈(Cabin)이 없는 실정이다.
때문에 작업 환경에서 발생하는 위험요인으로부터 운전자를 보호하기 위한 방법으로 건설 장비의 원격 제어 기술에 대한 연구가 활발히 진행되고 있다. 진 익훈은 ZigBee 모듈과 마이컴을 적용하여 굴삭기의 원격제어 기술에 관한 연구를 수행하였고,
1)양순용은 XBee 통신으로 굴삭기 작업장치의 원격제어 시스템 에 관한 연구를 수행하였다.
2-3)대부분의 원격제어 기술에 관한 연구는 굴삭기의
작업기 제어에 관한 연구였으나, 효율적인 원격제어
를 위해서는 휴대 가능한 소형 송신기를 이용하여
주행 및 작업 제어가 가능하여야 한다. 그러나 송신
기 크기의 제약으로 인해, 한 개의 조이스틱으로 2개
이상의 액추에이터를 제어할 수 있는 복합동작 제어
가 요구된다. 또한, 원격통신은 거리, 신호세기, 장애 물과 같은 사용 환경에 따라 제어 특성이 변화하기 에, 다양한 환경에서 원격제어 특성이 어떻게 변화하 는지 확인이 필요하다.
4)따라서, 본 연구에서는 한 개의 조이스틱 신호로 2 개의 액추에이터를 동시에 제어가 가능한 알고리즘 을 개발하고, 다양한 작업 환경과 통신 방법에 따라 원격 제어 특성이 어떻게 변화하는지를 실험을 통해 분석하여, 실내 및 실외에서 사용하는 소형 굴삭기에 적합한 통신 방법을 제시하고자 한다.
2. 주행 제어 알고리즘
기존 굴삭기는 Fig. 1과 같이 2개의 조이스틱으로 붐, 암, 버킷 실린더 및 선회모터를 제어하고, 2개의 페달로 구성된 페달밸브로 좌우 주행모터를 제어하 는 방식이다. 작업자는 발로 페달밸브를 조작하고, 양손으로 조이스틱을 조작하면서 굴삭기를 운전한다.
Fig. 1 Pedal valve and joystick
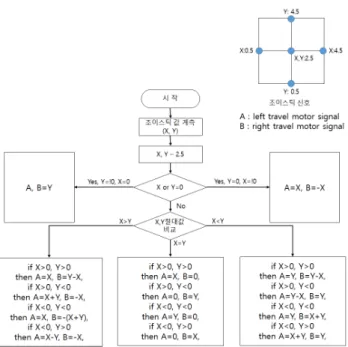
그러나 일반적인 원격제어기의 송신부는 Fig. 2와 같이 휴대가 편리한 소형으로 제작되고 있어, 손으로 만 제어가 가능하다. 따라서, Fig. 3과 같이 굴삭기의 주행을 위해, 1개의 조이스틱에서 발생되는 2개의 신 호(X, Y)를 복합적으로 연산하여 2개의 주행모터를 제어하는 알고리즘을 Fig.4와 같이 표현 하였다.
Fig. 2 Remote controller(transmitter)
Fig. 3 Traveling control strategy by one joystick
위의 Fig. 3에서 기호 중 왼쪽의 부호는 좌측 주행 모터의 주행상태, 우축의 부호는 우측 주행모터의 주 행상태를 의미하며 부호의 값이 (+)이면 전진 주행, (-)이면 후진 주행, (0)이면 주행하지 않음을 의미한다.
주행 모드 중 Pivot Turn은 한쪽 주행모터는 멈춰 있고, 나머지 주행모터만 회전하여, 멈춰있는 트랙을 중심으로 회전하는 것을 뜻하며, Spin Turn은 2개의 주행모터가 다른 방향으로 동시에 회전하면서 제자 리 회전하는 것을 뜻하는 것이다.
Fig. 4 Traveling control algorithm
본 연구에 사용된 전자 조이스틱은 X, Y 2개의 출 력신호를 가지며, 각 축의 출력값은 (0.5~4.5)V, 중립 값은 2.5V 이다.
주행 제어 알고리즘을 구현하기 위해서는 조이스
틱의 위치분석이 우선되어야 한다. 위치 분석을 통
해, 제어하여야 하는 비례밸브 선정 및 제어수준을
결정할 수 있다. 조이스틱의 위치 분석 방법은 Fig. 5 와 같이 나타내었다.
Fig. 5 Concept of joystick absolute angle
조이스틱의 출력신호로 조이스틱의 현재 위치를 분석하기 위해서는 출력값을 정규화 시키는 전처리 가 필요로 하다.
따라서 식(1)에 의해 조이스틱의 출력값 범위를 (–1~1)로 변화시켰다.
5)
×
m ax
m in
m in
(1)
여기에서,
는 조이스틱의
X, Y값, 는 정규화 된 값(
),
m in는 최솟값,
m ax는 최댓값이다 . 조이스틱의 각도 계산을 위해 아래의 식(2)를 이 용하여 0~360°의 각도를 계산하였다.
tan
i f
tan
tan
i f
or
i f
i f
i f
(2)
여기에서
는 조이스틱의 각도이다.
조이스틱 신호 분석을 통해 밸브의 제어량은 식 (3), (4)를 이용해 구해진다.
(3)
×
×
(4)
여기에서
,
는 비례밸브 제어 신호,
,
는
의 신호 범위를 (0~1)로 만들기 위한 상수값이다.
식(2)~(4)를 이용해 조이스틱의 위치에 따라, 제어 대상 밸브 및 제어량을 결정할 수 있으며, 위치에 따 른 변수
,
,
,
,
는 Table 1과 같이 정리 하였다.
Table 1 Valve control strategy and parameter value Joystick Angle
(Degree)
Value
0 ≦
< 45
1
45 ≦
< 90
1
90 ≦
< 135
3
135 ≦
< 180
3
180 ≦
< 225
5
225 ≦
< 270
5
270 ≦
< 315
7
315 ≦
< 360
7
여기에서
은 좌측 주행모터를 제어하는 밸브,
는 우측 주행모터를 제어하는 밸브이며, a는 전진 주행, b는 후진주행을 제어하기 위한 포트로 설정하 였다.
Table 1과 같이 계산된 값을 도식화 하면 Fig. 6으 로 나타내어진다. Fig. 6(a)는 조이스틱의 위치에 따 라 밸브 1을 제어하는 신호이며, Fig. 6(b)는 밸브 2 를 제어하는 신호이다.
Fig. 6과 같이 조이스틱이 중심이 아닌 곳에 위치
한다면, 위치에 따라 제어대상 및 제어값이 결정되어
진다.
(a) control signal for valve 1
(b) control signal for valve 2
Fig. 6 Control signal for valve by driving algorithm
3. 시험장비 구성
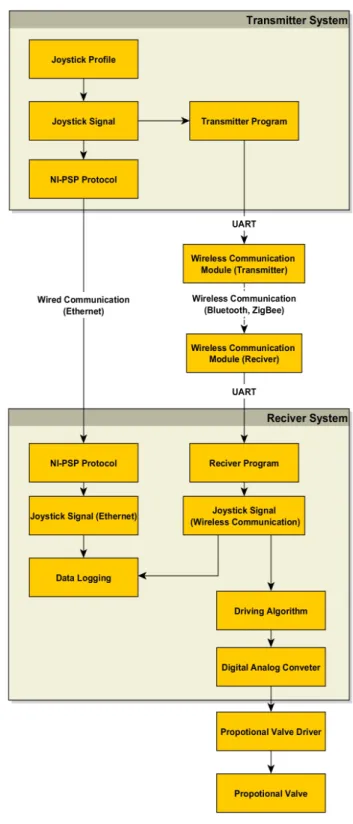
주행 알고리즘 제어성능 분석을 위해, Fig. 7과 같 이 굴삭기 주행모터를 제어하는 2개의 비례제어 밸 브와 조이스틱 신호를 무선통신을 이용해서 제어하 도록 구성하였다. Fig. 8과 같이 2개의 비례제어 밸브 와 주행모터를 모사하기 위한 가변오리피스와 릴리 프 밸브, 제어성능 확인을 위해 밸브 각각의 출구단 에 압력센서를 장착한 유압회로도를 구성하고, Fig. 8 과 같이 제작하였다.
이때, 공급압력은 22MPa (220bar)이고, 가변오리피 스를 조절하여 출구단 압력은 19MPa (190bar)가 되도 록 설정하였다. 릴리프 밸브는 가변오리피스 후단의
배압을 설정하기 위해 10MPa (100bar)로 설정하 였다. 비례제어 밸브는 HYDAC社의 P4WE06E26 을 사용하였으며, 밸브의 사양은 Table 2와 같 다.
6-7)Fig. 7 Configuration of wireless communication test system
Fig. 8 Hydraulic circuit of test equipment
Fig. 9 Test equipment of wireless communication
Table 2 Specification of proportional solenoid valve
Parameter Value
Operating Pressure(bar) 350
Nominal Flow(LPM) 40
Switch Time(msec)
On 50
Off 40
Hysteresis(%) 6
Repeat Accuracy(%) ±1.5
Voltage(V) 24
Current(A) 0.86 @ 24VDC
원격제어를 위해 사용된 ZigBee 및 Bluetooth 통신 모듈의 통신 주파수는 2.4GHz로 동일하며, 최대 전송 속도는 Bluetooth가 ZigBee 대비 약 3.7배 빠른 수준이 며, 최대 전송거리는 ZigBee 는 1,600m, Bluetooth는 100m 이다. 자세한 사양은 Table 3과 같다.
8-9)Table 3 Specification of wireless communication module
Type
Specification ZigBee Bluetooth Standard IEEE 802.15.4 IEEE 802.15.1
(v2.0+EDR) Working Frequency 2.4 GHz 2.4 GHz
Power Consumption
mW 181.5 ~ 2,400 400 ~ 960
V 3.3 ~ 12 5 ~ 12
mA 55 ~ 200 80
Output Power 100 mW (20dBm)
65 mW (18dBm) Maximum
Transmission Speed 250 Kbit/sec 921.6 Kbit/sec Maximum
Transmission Distance 1,600 m 100 m