http://dx.doi.org/10.7839/ksfc.2020.17.1.037
굴착기 머신 콘트롤 기술 개발 및 생산성 향상 평가 Development of a Machine Control Technology and
Productivity Evaluation for Excavator
이민수
1․신영일
1․최승준
1․강한별
1․조기용
1*Min Su Lee
1, Young Il Shin
1, Seung Joon Choi
1, Han Byul Kang
1and Ki Yong Cho
1*Received: 25 Nov. 2019, Revised: 23 Jan. 2020, Accepted: 18 Feb. 2020
Key Words:Machine Control(머신 컨트롤), Intelligent Excavator(지능형 굴착기), Auto Grading(법면 자동작업), Auto Leveling(평탄화 자동작업)
Abstract: An intelligent excavator can be divided into Machine Guidance (MG), semi-automatic, and unmanned by technology. The MG technology excavator is equipped with a tilt sensor on each link of the excavator and a GPS is installed on the excavator body to inform the user of the position of the excavator bucket end. Machine control (MC) technology that assists the user's work can be divided into semi-automatic and fully automatic technology.
The semi-automatic MC equipment has already been commercialized by Komatsu and Caterpillar. The MC excavator is equipped with an electro-hydraulic system, sensors and controllers to control the excavator bucket end according to the user's needs. In this study, the semi-automated excavator modified based on manual excavator, is equipped with an electro-hydraulic system, a controller system, multi-sensors and a control algorithm is developed to assist in excavation work such as leveling and grading. By applying the developed technology, it was possible to confirm productivity improvement compared to manual digging and leveling work. In the future, further research to improve the accuracy of the hydraulic precision control and collaborative work with heterogeneous construction equipment such as dump truck and automated collaboration tasks technology could be developed.
* Corresponding author: [email protected]
1 Korea Construction Equipment Technology Institute, Gunsan-si 54004, Korea
Copyright Ⓒ 2020, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. 서 론
2018년도 기준으로 굴착기 세계시장은 297억불, 34 만대 규모이며
1), 굴착기 시장의 성장률은 2%이하로 정체되고 있다. 특히, 중국 업체들의 급성장으로 인 해 가격경쟁이 심화되는 레드오션으로 변질되고 있 다. 이에 따른 차별화 기술로 기존의 범용 기계식 굴 착기와 차별화되는 ICT 및 지능화 기술을 통한 머신 가이던스(MG, Machine Guidance) 및 머신 컨트롤 (MC, Machine Control) 건설기계 개발이 선진업체 중
심으로 추진되고 있다.
스마트 굴착기 시장은 2019년 기준 1.5억불에서 2025년 5.2억불로 성장할 것으로 예상되어 평균 성장 률 28%로 예상된다. 이는 기존 범용 굴착기의 2% 이 하의 성장률보다 15배 이상 높아 차세대 시장으로 주목받고 있다
2).
굴착기의 지능화 기술은 기술 단계별로 MG, MC, 단독 무인화로 나눌 수 있다
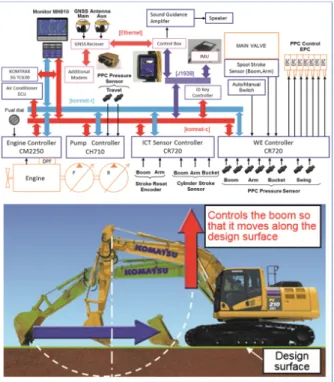
3). MG 기술은 굴착기 각 링크에 기울기 센서 등을 탑재하고 굴착기 차체에 GPS를 설치하여 굴착기 버킷 끝단의 위치를 사용자 에게 알려주는 기술이다. 사용자의 작업을 보조해주 는 MC 기술은 반자동과 완전 자동 기술이 있으며, Komatsu, Caterpillar 등 굴착기 선진사에서 이미 반자 동 MC 장비를 상용화하고 있다. <Fig.. 1>은 Leica와 Topcon에서 출시한 굴착기용 MG 시스템을, <Fig.. 2>
은 Komatsu의 MC 굴착기 시스템 개요를 나타낸다.
MC 굴착기는 전자유압시스템(Electro- hydraulic system) 및 센서, 제어기 등이 탑재되어 사용자의 필 요에 따라 굴착기 버킷 끝단을 제어하여 작업한다.
이에 본 연구에서는 기존 기계식 굴착기를 개조하 여 전자유압시스템 및 제어기, 제어에 필요한 센서 등을 탑재하고, 평탄화, 법면 등의 굴삭 작업을 보조 해주는 제어 알고리즘을 개발하여 작업 정밀도 평가를 수행한 반자동 MC 기술에 대하여 기술하고자 한다.
Fig. 1 MG excavator (a. Leica
4), b. Topcon
5))
Fig. 2 MC excavator (Komatsu
6))
2. 굴착기 작업 자동화 기술
2.1 전자유압시스템 및 제어 시스템
본 연구에서는 굴착기의 제어를 위해 기존의 MCV(Main Control Valve)와 유압 조이스틱 사이에 전자 제어를 위한 EPPR(Electro-Proportional Pressure Reducing) 밸브 및 압력 센서로 구성된 밸브 블록을 탑재하고 제어시스템과 전기적으로 연결하였다
7-8). 또한 버킷 끝단 위치 계산 및 제어를 위해 각 축의 실린더에 스트로크를 측정할 수 있는 센서를 삽입하 였다<Fig. 3>.
Fig. 3 Configuration of Control System
OW OB
O0
P OTip
TWB TB0
T
T0P
TWP
Fig. 4 Excavator Model Coordinate System
2.2 굴착기 제어 알고리즘
<Fig. 4>와 같이 전체 좌표계를 기준으로 굴착기를 스윙(Swing), 붐(Boom), 암(Arm), 버킷(Bucket)의 4축 의 직렬 로봇으로 기구학을 구성하였으며<Fig. 5>, 정의된 좌표계를 기준으로 정해진 D-H(Denavit–
Hartenberg) 변수는 <Table 1>과 같다
9).
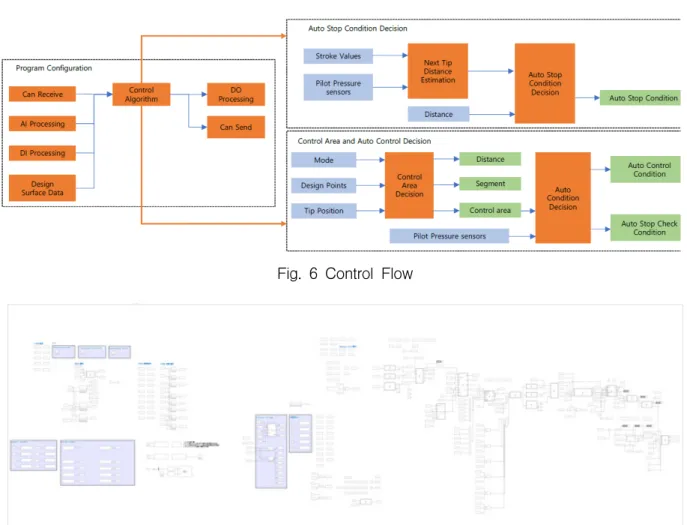
Fig. 6 Control Flow
Fig. 7 Matlab Simulink Program Implementation 굴착기의 기구학 좌표계를 이용하여 굴착기의 변
환 행렬을 아래 <수식. 1>과 같이 정의하였으며, 변 환 행렬을 통해 <Fig. 5>의 원점(O0)로부터 버킷의 끝단 좌표계(O4)의 위치 및 자세를 구할 수 있다. 또 한, 역기구학(inverse kinematics) 모델을 정립하여 굴 착기 끝단 좌표계로부터 각 축의 각도(joint angle)을 구할 수 있다.
반자동 제어를 위해 사용자가 암을 제어하면 제어 시스템이 붐을 제어하는 방식으로 굴착기의 버킷 끝 단이 설계면(Design surface)을 추종할 수 있는 제어 알고리즘을 개발하였다. 각 축의 밸브 제어는 PID제 어를 이용하였으며 제어 알고리즘의 구성도는 <Fig.
6>와 같다. 제어 알고리즘은 Matlab Simulink로 구현 하였다<Fig. 7>
10-13).
O0 x0
z0
O1 x1 y1
O2 x2
y2
O3 x3 y3
O4 x4
y4
a1 a2 a3 a4
(Px, Py, Pz)
Swing Boom Arm Bucket Tip
Fig. 5 Excavator Front Kinematics
Table 1 Link D-H Parameters
(D = =d
4, 0, d
4)
(1)
굴착기는 실린더의 스트로크(cylinder stroke)의 길 이를 통해 각 축의 각도가 결정되기 때문에 각 축의 스트로크와 각도 간의 관계식을 수식화 하였다. <Fig.
8>은 사용자가 버킷의 좌/중/우 기준점에 따라 끝단 제어를 하도록 한 것을 나타낸다. <Fig. 9>은 이를 적 용한 반자동 법면 자동화 작업 시뮬레이션 연속 사 진이다.
지능형 굴착기는 평탄화(leveling) 작업 시, 작업의
품질을 균일하게 유지하기 위해 버킷과 design
surface 간의 각도를 동일하게 유지하는 것이 필요하 기 때문에 본 연구에서는 Auto-control에 버킷 각도를 제어 하는 기능을 추가하였으며, <수식. 2>와 같다.
<Fig. 10>의 위쪽 그림을 통해 기존 시뮬레이션의 경 우 굴착기의 버킷이 차체 쪽으로 진행하면서 버킷의 각도가 작아짐을 확인할 수 있지만, 아래쪽 그림에서 는 차체 쪽으로 진행함에 있어 붐은 물론 버킷의 각 도를 제어하여 버킷의 자세가 유지됨을 알 수 있다.
버킷 각도 제어를 통해 굴착기의 차체 안쪽 영역까 지 작업 영역이 확대되고, 안정적으로 작업 제어를 할 수 있는 이점을 가지게 된다.
sin
sin
tan tan