https://doi.org/10.12673/jant.2019.23.5.452
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons.
org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 2 October 2019; Revised 4 October 2019 Accepted (Publication) 26 October 2019 (30 October 2019)
*Corresponding Author: Yu-kwang Park Tel: +82-31-538-6066
E-mail: [email protected]
원격 측정 시스템 파라미터 실시간 업데이트 PCM 엔코더 구조
PCM Encoder Structure for Real-time Updating of Telemetry System Parameters
박 유 광
1윤 원 주
21
단암시스템즈(주) 기술연구소
2
한국항공우주연구원
Yu-Kwang Park
1*· Won-Ju Yoon
21
R&D Center, DANAM Systems, Gyeonggi-do 13930, Korea
2
Korea Aerospace Research Institute, Daejeon 34133, Korea
본 논문에서는 원격 측정 시스템 파라미터에 대한 실시간 업데이트가 가능한 PCM (pulse code modulation) 엔코더 구조에 대해 기술한다. PCM 엔코더 내부에는 FPGA (filed programmable gate array), flash 메모리, 센서 데이터 계측을 위한 아날로그 신호 조절부를 구성하였다. PCM 엔코더의 FPGA 내부에 로직을 통해 UART (universal asynchronous receiver/transmitter) 통신, 아날로그 신호 조절 부 제어, flash 메모리 제어, 프레임 구성이 가능하다. UART 통신을 이용해 PC에서 파라미터 데이터를 PCM 엔코더에게 송신할 수 있으며, flash 메모리가 제어되어 원격 계측 시스템의 파라미터가 실시간으로 업데이트 되어 최종적으로 프레임이 구성된다.
시뮬레이션과 검증을 통해 파라미터 데이터의 실시간 업데이트 여부에 대해 확인하였으며, 제안된 구조를 이용하여 유연성과 편의성을 높인 원격 계측 시스템을 구성할 수 있음을 확인하였다.
[Abstract]
In this paper, we describe a PCM encoder structure that can update the telemetry system parameters in real time. In the PCM encoder, an analog signal control unit for FPGA, flash memory, and sensor data acquisition was constructed. UART communication, analog signal control, flash memory control, and frame generation are possible through logic inside FPGA of PCM encoder. UART communication allows the PC to transmit parameter data to the PCM encoder, and flash memory is controlled to update the parameter of the telemetry system in real time and finally the frame is formed. Simulation and verification were performed to confirm whether the parameter data is updated in real time, and the proposed structure was used to construct a telemetry system with enhanced flexibility and convenience.
Key word : Telemetry system, Pulse code modulation encoder, flash memory, Re-configuration.
·
[요 약]
*
Ⅰ. 서 론
원격 측정 시스템은 비행체의 내부 상태 및 비행정보를 실시 간으로 확인하기 위해 주변 장치 및 센서의 데이터를 수집하여 지상으로 송신하여 지상에서 수신된 데이터를 처리하는 시스 템이다. 원격 측정 시스템은 1950년대부터의 센서 신호를 취득 하여 전송하거나 저장하는 고전적인 1세대 기술을 기점으로 항 공우주분야에 널리 활용되었으며, 2~3 세대를 거쳐 21세기인 현 시점에서는 고속 네트워크 기반의 4세대 원격 측정 시스템 까지 변화되고 있다[1].
PCM 엔코더는 원격 측정 시스템에서 프레임을 구성하는 중 요한 역할을 한다. 주변 장치 및 센서로 부터 데이터를 획득하 여 지상에서 분석이 가능하도록 IRIG-106 표준의 PCM 프레임 에 맞추어 동기화 코드, 데이터, 에러 검출 코드 등으로 구성하 여 송신기를 통해 지상으로 데이터를 송신한다[2]. 특히 데이터 중에서도 계측 데이터는 주로 온도, 변형률, 진동, 가속도, 회전 수 등의 상태를 계측하기 위해 사용된다. 이러한 여러 종류의 센서들은 데이터의 중요도 및 변화율 , 요구 사양에 따라 기본적 인 정보를 설정해야 한다 . 데이터의 변화율에 따른 샘플링 간격 과 입력범위, 이득, 오프셋 등에 대한 설정을 PCM 엔코더의 저 장 매체를 통해 저장하게 된다. 이렇게 저장된 파라미터를 통하 여 PCM 엔코더는 계측을 진행하고 프레임을 구성 한다.
1980년대부터 저장 매체인 EEPROM(electrically erasable programmable read-only memory)을 이용하여 파라미터를 저장 할 수 있는 엔코더에 대한 방안이 제시되었다[3], [4]. 또한 최근 에는 FPGA 내부의 ROM(read only memory)에 파라미터를 저장 하는 방안도 제시되었다[5]. 그러나 구체적인 구조와 구현에 대 한 내용은 찾아볼 수 없거나 파라미터 변경에 따른 유연성 있는 업데이트 방안에 대해서는 제시되지 않았다 . 파라미터는 비행 체에 대한 사전 시험을 진행하면서 요구사항의 변경에 따라 수 시로 변경될 수 있다. 변경된 파라미터를 업데이트하기 위해서 는 PCM 엔코더 내의 저장매체에 저장된 데이터를 변경해야 한 다.
본 논문에서는 PC에서 생성된 파라미터 데이터를 UART 통 신을 통해 PCM 엔코더로 파라미터 데이터를 송신하고 flash 메 모리에 저장 및 업데이트 할 수 있는 구조를 제안한다. PCM 엔 코더의 FPGA를 이용하여 프레임을 구성하기 위한 모든 엔코더 의 기능은 HDL(hardware description language)를 사용하여 로직 으로 구현하였다 . 파라미터 변경이 요구 될 경우에는 PC를 통 해 변경된 파라미터 데이터를 PCM 엔코더로 송신하고 송신된 데이터는 FPGA를 통해 다시금 새롭게 flash 메모리에 쓰이게 된다. 이러한 형태의 구조를 사용할 시 원격계측시스템의 유연 성을 높일 수 있다. 또한 파라미터를 변경하기 위해 로직에 대 한 컴파일을 다시 하지 않고 바로 적용할 수 있다는 편의성도 높일 수 있다 . 본 논문에서는 PC와 PCM 엔코더 간의 통신은 UART 방식을 이용하였으나, 원격 측정 시스템의 구조에 따라 다른 여러 가지 통신방법도 적용할 수 있는 확장성도 보장된다.
제 Ⅱ장에서는 파라미터 데이터를 실시간 업데이트 할 수 있는 구조 설계에 대해 기술하며, 제 Ⅲ장에서 해당 구조에 대한 시 뮬레이션을 통해 기술한 구조에 대한 검증을 진행한다.
Ⅱ. 구조 설계
본 논문에서는 원격 측정 시스템의 파라미터를 실시간으로 변경할 수 있는 PCM 엔코더의 구조에 대해 기술한다. 원격 측정 시스템의 성격과 계측하고자하는 센서에 따라 다양한 구조가 존재할 수 있다. 이에 본 절에서는 검증을 위해 간략 한 하드웨어, 파라미터, 로직에 대한 구조에 대해 기술한다.
2-1 PCM 엔코더 하드웨어 구조
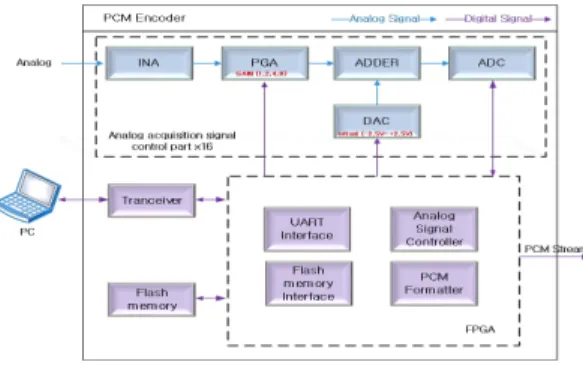
PCM 엔코더 하드웨어 구조는 크게 그림 1과 같이 아날로 그 신호 조절부, FPGA, flash 메모리, 트랜시버로 구성된다.
FPGA와 flash 메모리는 Intel社의 Cyclone V, EPCQ128A 제품 을 사용하였다[6].
아날로그 신호 조절부에서는 INA(instrument amplifier)로 입 력되는 센서의 아날로그 출력 신호를 입력받는다. 그리고 설정 한 파라미터에 따라 PGA(programmable gain amplifier)의 아날로 그 신호 이득과 DAC(digital to analog converter)의 출력 제어를 통해 오프셋 조절이 가능하다. 이후 ADC(analog to digital converter)를 통해 계측한 아날로그 신호를 디지털 신호로 변 경한다. FPGA는 PCM 엔코더의 모든 역할이 가능하도록 하는 주요한 디바이스이다. PC와의 UART 통신을 위한 인터페이 스, 아날로그 신호 조절부 제어, 프레임 구성 및 PCM 스트림 송신, 파라미터를 저장하는 flash 메모리 제어 등의 역할을 한 다. flash 메모리는 FPGA의 제어를 통해 파라미터 데이터를 저장하거나 읽어 올 수 있다. 트랜시버는 PC와 UART 통신을 통해 출력되는 데이터를 FPGA에서 수신할 수 있도록 신호 규 격을 변경해주는 역할을 한다. 모든 하드웨어 구성을 통해 센 서로 부터 데이터를 획득하여 생성된 프레임은 PCM 스트림으 로 송신기로 전달할 수 있다.
그림 1. PCM 엔코더 하드웨어 구조
Fig. 1. Structure of PCM encoder hardware.
2-2 파라미터 데이터 구조
파라미터는 원격 측정 시스템에서 계측하고자 하는 센서들 에 대한 사양 및 요구 조건에 맞추어 개별적으로 설정하기 위한 채널 속성정보 및 프레임 정보로 이루어진다. 본 논문에서는 아 래 그림 2와 같이 파라미터를 구성한다. PCM 프레임 정보는 16 채널에 대한 PCM 프레임 내의 순서를 내타낸다. 그리고 채널 속성정보는 각 채널의 입력범위, 이득, 오프셋, 샘플링 주파수 를 나타낸다. PCM 엔코더에 전원이 인가되었을 때 초기설정 시 FPGA에서는 flash 메모리로부터 파라미터 데이터를 읽어 채 널 속성정보를 디코딩하여 각 아날로그 신호 조절부 제어를 통 해 설정한다. 이후 PCM 프레임 정보내의 워드 순서에 맞도록 각 채널의 ADC를 제어하여 계측 데이터를 획득한다.
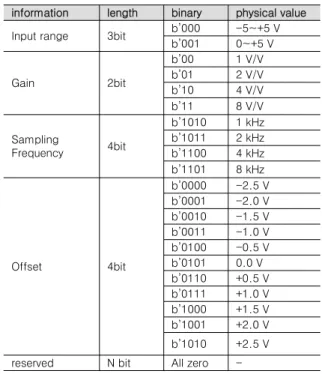
파라미터 데이터 중 채널 속성정보는 표 1과 같이 표현된다.
입력범위는 센서로 부터 계측하고자 하는 신호의 범위를 0~5 V 혹은 –5~+5 V 으로 설정한다. 0~5 V 범위로 계측할 경우 아날 로그 신호가 음의 전압을 나타내면 0 V의 값으로 PCM 프레임 에 구성된다. 이득은 1~8까지로 계측되는 아날로그 값에 PGA 를 통해 적용할 수 있으며, 오프셋은 –2.5~+2.5 V 까지 오프셋 전압을 DAC를 통해 적용할 수 있다. 샘플링 주파수는 센서의 성격에 따라 설정하며 ADC에서 데이터 변환을 위한 샘플링주 기를 설정할 수 있다. 모든 채널에 대한 파라미터를 바이너리 데이터로 설정하여 최종적으로 전 채널에 대한 파라미터를 구 성한다. 이렇게 구성된 채널 파라미터는 flash 메모리에 저장하 여 PCM 엔코더에 전원이 인가되었을 때 flash 메모리로부터 데 이터를 읽어와 각 채널을 설정한다. 본 논문에서 표현한 파라미 터는 검증을 위해 몇 가지 항목에 대해 표현한 것이며, 여러 다 른 원격 측정 시스템에서는 각 각의 하드웨어 설계에 따라 혹은 센서 구성에 맞도록 파라미터를 설정하여 사용할 수 있다.
그림
2. 파라미터 데이터 구조 예시
Fig. 2. Example of parameter data structure.
표 1. 파라미터 정보 예시
Table 1. Example of parameter information.
information length binary physical value b’000 -5~+5 V Input range 3bit
b’001 0~+5 V
b’00 1 V/V
b’01 2 V/V
Gain 2bit
b’10 4 V/V
b’11 8 V/V
b’1010 1 kHz
Sampling b’1011 2 kHz
Frequency 4bit b’1100 4 kHz
b’1101 8 kHz b’0000 -2.5 V b’0001 -2.0 V b’0010 -1.5 V b’0011 -1.0 V b’0100 -0.5 V b’0101 0.0 V
Offset 4bit
b’0110 +0.5 V b’0111 +1.0 V b’1000 +1.5 V b’1001 +2.0 V b’1010 +2.5 V
reserved N bit All zero -
2-3 PCM 엔코더 로직 구조
FPGA 내부는 HDL 언어로 설계한 로직으로 구성된다. 로직
구조는 그림 3과 같다. PC와의 UART 통신을 위한 UART 인터
페이스가 구성되어 있으며, UART 통신을 통해 수신된 파라미
터 데이터를 flash 메모리 인터페이스 내부의 버퍼에 임시로 저
장한다 . flash 메모리의 한 바이트 데이터를 저장하는데 걸리는
시간이 UART 통신을 통해 한 바이트 데이터가 수신되는 시간
보다 더 소요되기 때문에 중간에 버퍼를 사용하였다. 버퍼에 저
장된 파라미터 데이터는 flash 메모리 제어기를 통해 flash 메모
리의 해당 주소에 저장된다. 이렇게 저장된 데이터는 초기설정
정보를 불러오는 초기설정 인터페이스와 flash 메모리 인터페
이스를 통해 파라미터 데이터를 프레임 정보와 채널 속성정보
를 분리하여 FPGA 내부 메모리에 저장한다. 프레임 정보는 매
프레임 마다 반복적으로 읽어야하기 때문에 flash 메모리에서
바로 데이터를 읽어올 경우 소요되는 시간이 길다. 이런 점을
보완하기 위해 읽기 /쓰기에 소요되는 시간이 적은 FPGA 내부
메모리에 저장한다. 채널설정은 채널 속성정보 내의 입력범위,
이득, 오프셋, 계측샘플링에 대한 정보를 각 각의 로직 블록에
전달하여 계측채널에 대한 기본정보를 설정한다 . 이후 프레임
정보에 따라 PCM 프레임 포맷터 블록에서 ADC 제어기 블록에
각 채널의 ADC를 통해 계측한 디지털 데이터를 요청한다. 최종
적으로 PCM 프레임 포맷터에서 프레임을 구성하여 스트림형
태의 데이터로 송신기로 전달한다.
그림
3. PCM 엔코더 로직 구조
Fig. 3. Structure of PCM encoder logic.
PCM 엔코더의 로직 동작은 그림 4와 같은 순서로 동작한다.
초기설정이 시작되면 flash 메모리에 이미 저장된 파라미터 데 이터를 읽어 원격 계측 시스템 설정을 진행하며, 완료된 이후 계측을 진행하여 PCM 스트림을 출력한다. PCM 스트림을 출력 하는 도중 PC를 통해 업데이트를 요청하는 파라미터 데이터가 UART 통신을 통해 수신되었을 때 flash 메모리에 파라미터 데 이터가 다시금 쓰여 업데이트된다. 이후 다시 초기설정을 진행 하며 flash 메모리 내의 업데이트 된 데이터를 읽어 채널을 설정 하고 계측을 시작하게 된다. 이러한 로직 구조를 통해 실시간으 로 업데이트가 가능한 원격 측정 시스템을 구성할 수 있다. 다 음 제 Ⅲ장 에서는 시뮬레이션을 통해 위의 구조 설계에 대한 검증을 진행할 것이다 .
그림
4. PCM 엔코더 로직 흐름도
Fig. 4. Flow chart of PCM encoder logic.
그림 5. PCM 프레임 구조 예시
Fig. 5. Example of PCM frame structure.
2-4 PCM 프레임 구조
PCM 프레임은 IRIG-106 텔레메트리 표준에 의거하여 구성 하였다 . 1 ms 주기의 N개의 부 프레임이 모여 하나의 주 프레임 을 구성되며 하나의 부 프레임에는 16개의 계측채널의 워드와 부 프레임 ID, CRC(cyclic redundancy check)로 이루어지도록 구 성하였다. 각 계측채널 워드는 파라미터 데이터 중 채널 속성정 보를 통해 설정된 채널이며 , 프레임 정보의 순서에 따라 배치된 다 .
Ⅲ. 시뮬레이션 및 검증
3-1 시뮬레이션
파라미터 실시간 업데이트에 대한 검증을 위해 PC를 통해 변경한 파라미터를 UART 통신을 통해 PCM 엔코더로 송신한 다 . PCM 엔코더는 업데이트를 위한 파라미터가 수신되면 PCM 엔코더 로직 흐름도와 같이 파라미터를 업데이트 하여 센서로 부터 데이터를 계측할 것이다. 본 장에서는 PCM 엔코더에서 파라미터 업데이트 진행여부와 변경된 파라미터를 설정한 계 측채널의 계측진행 여부를 시뮬레이션 및 검증을 진행한다. 시 뮬레이션은 Intel社의 Quartus II 소프트웨어의 “SignalTap II Logic Analyzer” 툴을 사용하였다.
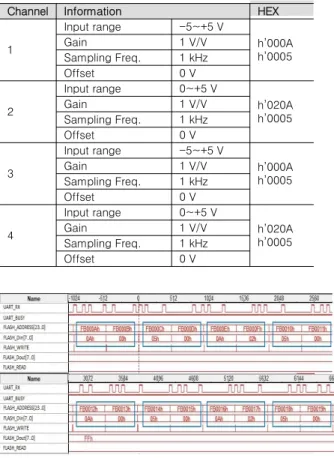
첫 번째로 파라미터 데이터가 정상적으로 PC와 PCM 엔코더 의 UART 통신이 이루어져 flash 메모리의 할당한 주소에 업데 이트 진행여부를 확인하였다. 4채널에 대한 채널 속성정보를 표 2와 같이 설정하여 해당 파라미터 데이터를 동작중인 PCM 엔코더로 송신하여 업데이트를 진행하였다. 그림 6에서
“UART_RX” 데이터가 수신이 되었을 때 “UART_BUSY” 시그
널이 하이레벨로 유지가 된다. 현재 UART 통신이 이루어지고
있음을 나타내며, flash 메모리 “FB000A, FB000B” 주소에 “0A,
00”의 값이 “FLASH_WRITE”의 펄스를 통해 쓰인다. 파라미터
데이터는 16비트 단위의 워드로 표현되지만 UART 통신은 바
이트 단위로 데이터를 송수신하며, PC에서 PCM 엔코더로 데이
터를 송신할 때 LSB(least significant bit) 우선으로 보내기 때문
에 PCM 엔코더에서는 하위 8비트의 데이터를 먼저 수신하게
된다. 따라서 “FB000A~FB0019” 주소에 쓰이는 데이터가 표 2
의 채널 속성정보들과 일치함을 알 수 있다. 이를 통해 UART
통신을 통해 파라미터 데이터가 flash 메모리에 업데이트 되는
것을 검증할 수 있다.
표
2. 시뮬레이션을 위한 채널 속성정보 1
Table 2. Channel property information 1 for simulation.
Channel Information HEX
Input range -5~+5 V
Gain 1 V/V h’000A
1 Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range 0~+5 V
Gain 1 V/V h’020A
2 Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range -5~+5 V
Gain 1 V/V h’000A
3 Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range 0~+5 V
Gain 1 V/V h’020A
4 Sampling Freq. 1 kHz h’0005
Offset 0 V
그림
6. UART 통신 SignalTap 시뮬레이션 결과
Fig 6. SignalTap simulation result of UART communication.
두 번째는 UART 통신이 완료된 이후 초기설정을 진행하여 flash 메모리에 저장된 표 2의 파라미터 데이터가 FPGA 내부 메 모리에 정상적으로 쓰이는 여부를 시뮬레이션 하였다. 그림 7 과 같이 UART 통신이 완료되어 “UART_BUSY” 신호가 로우레 벨이 되었을 때 다시금 초기설정을 시작하며 flash 메모리 내부 데이터를 읽어올 수 있도록 “FLASH_READ_EN” 신호가 하이 레벨이 된다. 이때 16비트가 한 워드로 이루어지는 FPGA 내부 메모리 하나의 주소에 flash 메모리의 두개의 주소 값을 불러왔 을 때 저장하게 된다.
그림
7. FPGA 내부 메모리 SignalTap 시뮬레이션 결과 Fig 7. SignalTap simulation result of FPGA memory.
표 3. 시뮬레이션을 위한 채널 속성정보 2
Table 3. Channel property information 2 for simulation.
Channel Information HEX
Input range 0~+5 V
Gain 1 V/V h’020A
1 Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range -5~+5 V
Gain 2 V/V h’008A
1 Sampling Freq. 1 kHz h’0000
Offset -2.5 V
Input range 0~+5 V
Gain 4 V/V h’030A
1 Sampling Freq. 1 kHz h’000A
Offset +2.5 V
Input range -5~+5 V
Gain 8 V/V h’018A
1 Sampling Freq. 1 kHz h’0005
Offset 0 V
그림 8. 연속적인 실시간 파라미터 업데이트 SignalTap 시뮬레이션 결과
Fig 8. SignalTap simulation result of continuous real-time
parameter update.그림 7의 표시된 “FPGA_MEM_Din” 데이터의 값이 표 2의 채널 속성정보와 일치되는 것을 확인할 수 있다 .
세 번째는 연속적으로 파라미터를 변경하였을 때의 업데이 트 여부에 대해 시뮬레이션을 진행하였다 . 하나의 계측 채널에 표 3과 같이 4가지의 경우에 대한 파라미터 데이터를 순차적으 로 PC를 통해 PCM 엔코더로 송신하였다. 송수신이 완료된 이 후 초기설정이 시작되고 FPGA 내부 메모리에 파라미터 데이터 저장이 완료되었을 때 해당 채널의 설정정보는 그림 8의 시뮬 레이션 결과와 같이 표 3의 설정한 파라미터 데이터와 일치하 는 것을 확인 할 수 있다.
3-2 검증
표 4와 같이 FPGA의 합성 결과를 통해 생성된 로직을 PCM
엔코더에 다운로드 하였다. FPGA의 입력 주파수는 50 MHz 이
며 , 내부 메모리 사용량은 약 55% 이다. 시뮬레이션을 통하여 확
인한 실시간 파라미터 업데이트 구조에 대해 실시간 하드웨어
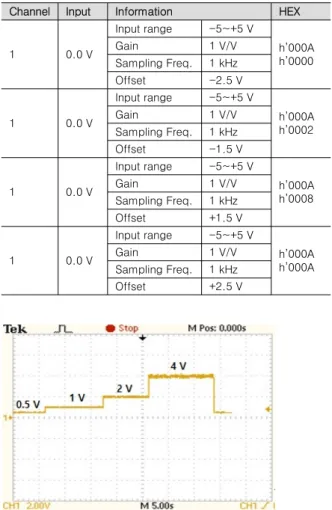
적용 여부를 확인하기 위한 시험을 진행하였다. 그림 9와 같은
시험 환경을 구성하여 표 5, 6과 같이 이득과 오프셋 설정을 연
속적으로 변경하였을 때 입력신호에 대해 아날로그 신호 조절
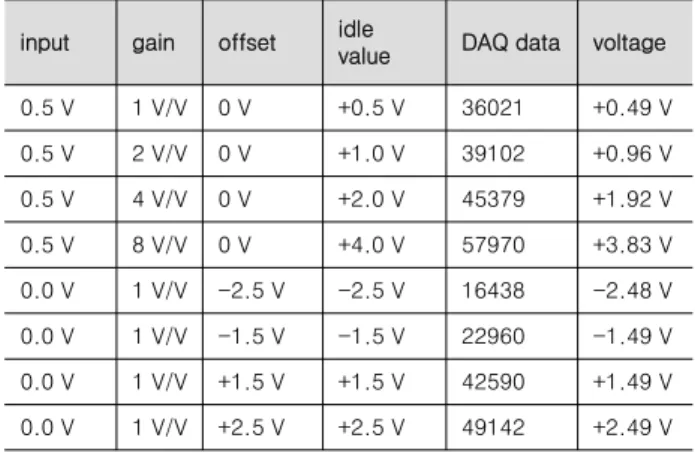
부의 PGA 및 DAC를 통해 이득과 오프셋 적용 여부를 오실로스 코프를 통해 ADC로 입력되는 값을 확인하였다. 이득은 그림 10과 같이 입력신호 0.5 V 에 대해 이득 1, 2, 4, 8 이 연속적으로 적용되는 것을 확인하였으며, 오프셋은 그림 11과 같이 입력신호 0 V 에 대해 오프셋 –2.5 V, -1.5 V, +1.5 V, +2.5 V 가 연속적으로 적용되는 것을 확인할 수 있었다. ADC를 통해 계측된 데이터 결 과는 표 7과 같다. 표 7의 “voltage”는 ADC를 통해 계측된 데이터 를 전압으로 환산한 값을 나타내다. 이상적인 아날로그 신호 레 벨과 아날로그 신호 조절부를 통해 계측한 데이터가 비슷한 것 을 확인할 수 있다. 계측 데이터의 전압 환산은 16비트 해상도 를 기준으로 “midscale”은 32768이며, LSB는 152 uV 이고, 식 (1)에 따라 계산한다.
(1)
PCM 엔코더 구조를 구현하고 시뮬레이션 및 검증을 통해 원격 계측 시스템의 파라미터가 실시간 업데이트 가능한 PCM 엔코더 구조를 적용할 수 있음을 확인하였다. 해당 구조의 PCM 엔코더를 이용하게 되었을 때 보다 편의성 있고 유연한 원격 계측 시스템의 구성이 가능할 것으로 판단된다.
표
4. FPGA
합성 결과Table 4. FPGA synthesis results.
item used available utilization
logic utilization 4,998 56,480 9%
total registers 5,083 - -
total pins 46 240 19%
total dsp blocks 8 156 5%
total plls 2 7 29%
total memory
3,859,072 7,024,640 55%
block
그림
9. 시험 구성도 Fig 9. Test diagram.
표 5. 검증을 위한 채널 속성정보 1
Table 5. Channel property information 1 for verification.
Channel Input Information HEX
Input range -5~+5 V
Gain 1 V/V h’000A
1 0.5 V
Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range -5~+5 V
Gain 2 V/V h’008A
1 0.5 V
Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range -5~+5 V
Gain 4 V/V h’010A
1 0.5 V
Sampling Freq. 1 kHz h’0005
Offset 0 V
Input range -5~+5 V
Gain 8 V/V h’018A
1 0.5 V
Sampling Freq. 1 kHz h’0005
Offset 0 V
표 6. 검증 위한 채널 속성정보 2
Table 6. Channel property information 2 for verification.
Channel Input Information HEX
Input range -5~+5 V
Gain 1 V/V h’000A
1 0.0 V
Sampling Freq. 1 kHz h’0000
Offset -2.5 V
Input range -5~+5 V
Gain 1 V/V h’000A
1 0.0 V
Sampling Freq. 1 kHz h’0002
Offset -1.5 V
Input range -5~+5 V
Gain 1 V/V h’000A
1 0.0 V
Sampling Freq. 1 kHz h’0008
Offset +1.5 V
Input range -5~+5 V
Gain 1 V/V h’000A
1 0.0 V
Sampling Freq. 1 kHz h’000A
Offset +2.5 V
그림 10. 실시간 이득 변경에 따른 오실로스코프 측정 결과
Fig 10. Oscilloscope measurement result according to
real-time gain change.
그림
11. 실시간 오프셋 변경에 따른 오실로스코프 측정 결과 Fig 11. Oscilloscope measurement result according to
real-time offset change.
표
7. 연속적인 파라미터 변경에 따른 계측데이터 분석 결과 Table 7. Acquisition data analysis result with continuous
parameter changes.
input gain offset idle
value DAQ data voltage
0.5 V 1 V/V 0 V +0.5 V 36021 +0.49 V
0.5 V 2 V/V 0 V +1.0 V 39102 +0.96 V
0.5 V 4 V/V 0 V +2.0 V 45379 +1.92 V
0.5 V 8 V/V 0 V +4.0 V 57970 +3.83 V
0.0 V 1 V/V -2.5 V -2.5 V 16438 -2.48 V 0.0 V 1 V/V -1.5 V -1.5 V 22960 -1.49 V 0.0 V 1 V/V +1.5 V +1.5 V 42590 +1.49 V 0.0 V 1 V/V +2.5 V +2.5 V 49142 +2.49 V
Ⅳ. 결 론
원격 계측 시스템은 비행체에서 내부 상태 및 비행정보를 센 서 및 주변장치에게서 데이터를 수집하고 지상으로 송신하는 시스템이다. 특히 PCM 엔코더는 원격 계측 시스템에서 수많은 채널들로부터 데이터를 획득하여 PCM 프레임을 생성하는 주 요한 역할을 담당한다. PCM 프레임을 생성하기 위해서는 원격 계측 시스템에 대한 기본적인 파라미터가 필요하다. 파라미터 는 프레임 정보 및 채널 속성정보를 포함하며 원격 계측 시스템 의 구성에 따라 이외의 여러 정보가 포함될 수 있다. 원격 계측 시스템은 사전 시험 및 점검 등의 검증을 진행하면서 시스템 구 성이 수시로 변경될 수 있다. 이에 따라 시스템 구성 변경에 따 른 파라미터에 대한 변경도 뒤 따라오게 될 것이다. 그렇기에 본 논문에서는 파라미터 실시간 업데이트가 가능한 원격 계측 시스템의 PCM 엔코더 구조에 대해 제안하였다. 제안한 PCM 엔코더는 FPGA를 이용하여 PC와의 통신, flash 메모리에 대한 제어 및 아날로그 신호조절부에 대한 제어가 가능하다. PC를
통해 파라미터를 구성하고 PCM 엔코더와 통신하여 파라미터 를 flash 메모리에 저장할 수 있다. 파라미터 업데이트가 필요 시 PC를 통해 변경된 파라미터를 재송신하여 업데이트 할 수 있다. 이에 대한 시뮬레이션과 검증을 진행하여 파라미터의 정 상적인 실시간 업데이트를 확인하였다. 제안한 PCM 엔코더 구 조를 통해 보다 편의성이 보장되며 유연한 원격 계측 시스템을 구성할 수 있다.
최근에는 원격 계측 시스템의 데이터 전송률 요구량이 증가 하고 있음에 따라 더 많은 채널에 대한 계측이 이루어져야한다.
또한 데이터 전송률 증가에 따라 네트워크 기반 데이터 취득시 스템이 개발되고 있다[7]. 이에 따라 UART와 같은 저속 통신이 아닌 고속 네트워크가 가능한 이더넷 혹은 무선 네트워크를 적 용하여 파라미터를 설정하고, 실시간으로 업데이트할 수 있는 원격 계측 시스템의 PCM 엔코더 구조에 대한 추가적 연구가 요구될 것이다.
References
[1] J. N. Kim, S. R. Lee, S.W Kim, W. J. Yun, S. K. Kwon, S.
M. Noh and K. S. Ma, “Technical trend of telemetry system for aerospace industry,” Current Industrical and Technological Trends in Aerospace, Vol. 12, No. 1, pp.
157-168, Oct. 2014.
[2] Telemetry Group, Range Commanders Council (RCC), IRIG STANDARD Document 106-19 Chapter 4. Pulse Code Modulation Standards [Internet]. Available:
http://www.irig106.org/wiki/irig_106-19
[3] P. M. Yun, “New concepts in PCM encoding,” in Proceeding of International Telemetering Conference, San Diego: CA, Vol. 23, pp. 441-448, Oct 1987.
[4] H. M. Eckstein, “A programmable-signal conditioning pulse code modulated telemetry encoder,” in Proceeding of International Telemetering Conference, San Diego: CA, Vol. 17, pp. 1319-1328, Oct 1981.
[5] G. H. Kim, M. H. Jin and B. K. Kim, “Design of a simple PCM encoder architecture based on programmable ROM,”
Journal of Advanced Navigation Technology, Vol. 23, No.
2, pp. 186-193, 2019.
[6] Intel corporation Homepage [Internet]. Avaliable:
https://www.intel.com
[7] A. Berdugo and J. Hildin, “A system approach to a network
centric airborne data acquisition system,” in Proceeding of
International Telemetering Conference, San Diego: CA,
Vol. 42, pp. 198-206, Oct 2006.
박 유 광 (Yu-Kwang Park) 2013년 2월 : 명지대학교 전자공학과 (공학사) 2013년 2월 ~ 현재 : 단암시스템즈(주) 기술연구소
※ 관심분야 : 원격 계측 장치, 디지털신호처리, 계측제어
윤 원 주 (Won-Ju Yoon)
2002년 2월 : 부산대학교 전자컴퓨터공학부 (공학사) 2004년 2월 : 부산대학교 컴퓨터공학과 (공학석사) 2010년 2월 : 부산대학교 컴퓨터공학과 (공학박사) 2010년 4월 ~ 현재 : 한국항공우주연구원
※ 관심분야 : 원격 계측 장치, Embedded systems, Network systems