ISSN 1226-3133 (Print)․ISSN 2288-226X (Online)
3 차원 지형정보를 연동한 대전 도심지의 K 대역 위성 채널 특성 분석
The Analysis of Channel Characteristics on Downtown of Daejeon for K-Band Satellite Communication Using 3D Map
권건섭 ․허종완․황기민․백성호*․유흥균**
Kun-Sup Kwon ․Jong-Wan Heo․Ki-Min Hwang․Seong-Ho Baek*․Heung-Gyoon Ryu**
요 약
본 논문은 OTM(On-The-Move: 이동형) 위성단말을 위해 통신 지역에서 지형/지물에 의해 발생될 수 있는 위성신호의 음영 지역을 분석하는 방법을 제시하였다. 지형/지물 정보를 포함하는 3D map을 HTZ warfare M&S(Modeling & Simula- tion) 도구를 이용하여 수신 신호의 프로파일을 얻고, 이를 Markov 모델을 이용하여 통계적으로 분석하였다. M&S 데이터 의 분석 결과는 대전 도심을 실 주행시험을 통해 확보한 수신 프로파일과 비교하였다. 비교 분석 결과, 수신 프로파일은 약 74.8 %의 일치를 보였으며, 가로수 영향 배제시 수신 프로파일의 통계적 분석 결과 또한 유사함을 보였다.
Abstract
This paper proposed the M&S(Modeling & Simulation) method of channel characterization of satellite communication in the operating area of satellite OTM(On-The-Move) terminal. In M&S, received signal profile was acquired by HTZ warfare software which uses 3 dimensional map including building, road information and geographical features, and then was analyzed statistically. And a received signal profile and its statistics from M&S data were compared with those from measured data. The research showed that the simulated received signal profile matched the measured one about 74.8 percent and simulated statistics matched well as roadside trees were excluded.
Key words: Satellite Communication Channel, On-the-Move, 3D Map, Markov Model, Channel
국방과학연구소(Agency for Defense Development) *LIG 넥스원(LIG Nex1)
**충북대학교(Department of Electronic Engineering, Chungbuk National University)
․Manuscript received March 3, 2014 ; Revised March 26, 2014 ; Accepted March 31, 2014. (ID No. 20140303-027)
․Corresponding Author: Kun-Sup Kwon (e-mail: [email protected])
Ⅰ. 서 론
OTM 위성단말은 이동간 위성통신을 제공하는 장비로 써 언제, 어디서든지 진정한 의미의 무선통신을 제공할 수 있다. 셀룰러 시스템이 인구밀도가 높은 지역에서 통 신 서비스를 제공하는 데 적합한 반면, 위성 이동통신은
인구 밀도가 낮은 지역을 여행하는 사용자에게 음성 및 데이터 통신을 제공하기에 더욱 적합하다.
위성과 OTM 위성단말 사이에는 여러 가지 문제점 들 이 존재한다. 다중경로 간섭, 쉐도잉(shadowing) 혹은 장 애물(blockage)은 시스템의 성능에 영향을 주는 요소로써, 수신 신호 세기에 상당한 수준의 변동성을 야기한다. 주
파수가 높아질수록 안테나의 빔폭이 좁아지고, 전파의 직 진성이 증가하므로 다중경로 간섭에 의한 영향은 줄어드 는 반면, 쉐도잉 효과의 증가는 신호 단절의 주된 원인이 된다. 따라서 OTM 위성단말을 위해 채널환경의 측정을 통하여 시스템의 생존성에 대한 철저한 분석이 요구된다.
하지만 채널환경의 측정을 통해 채널 특성을 분석하 고, 이를 모델링하는 것은 한계가 있다. 모든 지역에 대한 측정이 불가할 뿐만 아니라, 다른 궤도의 위성을 사용하 는 경우 채널 특성이 달라지기 때문이다. 즉, 위성단말의 운용환경과 채널 특성이 밀접하게 관련되어 있다. 이러한 이유로 위성 채널환경의 실 측정 없이 M&S를 통해 임의 의 경우에 대한 채널 특성을 분석하는 방안이 필요하다[1]. OTM 위성단말이 운용되는 지역은 크게 도심 지역(ur- ban), 야지 지역(open or rural), 고속도로 지역(highway)으 로 구분될 수 있다[2]~[5]. 도심지역은 높은 건물에 의한 영 향이, 야지 지역은 수풀 혹은 나무에 의한 영향이 많으며, 고속도로 지역은 속도에 의한 영향이 많은 채널 특징을 가질 것으로 예상할 수 있다. 본 논문에서는 이동형 위성 단말을 위하여 통신 지역의 지형/지물에 의해 발생될 수 있는 위성신호 음영 지역의 M&S 결과를 다룬다.
본 논문에서 다루는 전파 분석 M&S는 지표면의 표고 정보, 빌딩 정보 등을 갖는 3D 지도와 연동하여 수행되었 다. 먼저 3D 지도상의 모든 위치에 대한 위성신호의 음영 여부를 계산하고, 임의로 선정된 OTM 위성단말의 이동 경로에서 계산된 위성신호 수신 레벨에 대한 프로파일 (profile)을 생성하였다. 그리고 OTM 위성단말에 적용하 기 위한 모뎀 및 데이터 전송 프로토콜 등을 개발하거나, 그 성능을 확인하는데 활용될 수 있도록 이동경로에서 생성된 수신레벨 프로파일의 통계적 분석을 수행하였다.
본 논문의 Ⅱ장에서는 지형정보를 이용하여 M&S 방 법 및 실 측정 방법을 제시하고, Ⅲ장에서는 각 방법으로 부터의 실험결과 값을 제시하고, 서로 비교 분석하였다.
Ⅱ. 3D 지형정보를 이용한 M&S
3D 지형정보를 이용한 위성 채널의 M&S를 위해 지형/
지물 정보를 갖는 3D 지도가 필요하고, 더불어 이 지도를 이용하여 지도상의 모든 GPS 좌표에 음영 분석을 위한 분석 방법이 필요하다.
본 논문에서는 전파분석 M&S 도구를 이용하여 사전 분석을 수행하고, 그 결과를 DB(Database)화하였다. 전파 분석 M&S 도구로써 ATDI 사의 HTZ warfare를 이용하였 다. HTZ warfare는 광범위하게 사용되는 무선망 계획 소 프트웨어로서, 이 소프트웨어는 군사용과 관련된 네트워 크(이동통신, 마이크로웨이브 링크, 위성링크 등) 분야에 도 적용이 가능하다. 한편, HTZ warfare와 유사한 기능을 갖는 M&S 도구로서 ICS designer가 있지만, ICS designer 는 이동통신 관련 분야에 적합하도록 HTZ warfare의 군 통신 및 전자전 관련 기능을 제거하여 비용을 낮춘 버전 으로 위성 음영 지역 분석기능을 포함하지 않기 때문에 ICS designer에서 위성 음영 지역 분석을 수행할 수 없다.
2-1 디지털 맵
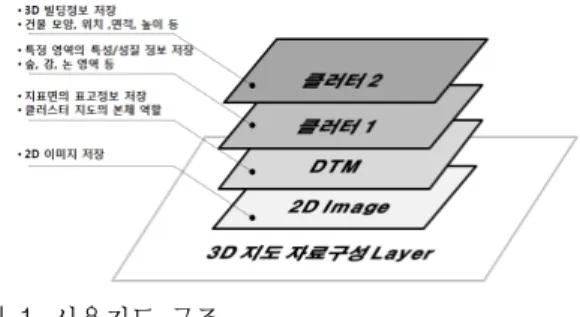
디지털 지도는 저장하고 있는 정보 유형에 따라 세부 Layer로 나뉘어져 구성된다. M&S 수행을 위해 적용된 디 지털 지도의 Layer 구성은 그림 1과 같다.
DTM(Digital Terrain Map)은 지형의 표고 정보를 담고 있는 3D 지도로서, DEM(Digital Elevation Model), DTED (Digital Terrain Elevation Data) 지도와 유사한 형태이다.
지도 Layer 중, 클러터 지도는 지도 본체에 해당하는 DTM 지도상에 탑재되어 사용될 수 있는 지도로서, 지도상의 특정 영역에 대한 성질 등의 정보를 담고 있다.
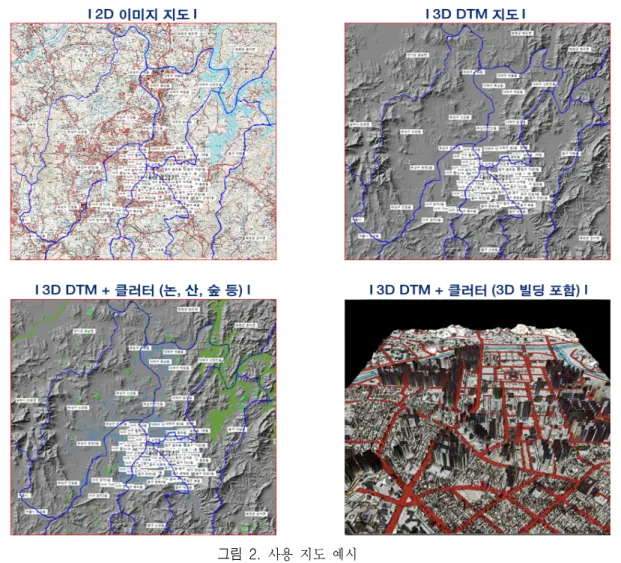
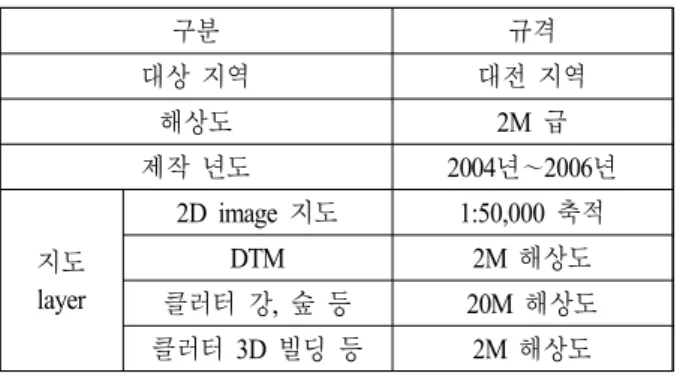
본 논문에서 사용된 지도 Layer 별 세부 형상과 규격을 그림 2와 표 1에 나타내었다. 2D 지도, 지형의 표고정보 를 갖는 DTM 지도, 클러터는 모두 국립지리원에서 제작 되었다. 특히 3D 건물에 대한 클러터의 경우, 국립지리원 의 기초자료(건물 위치, 건물 층수 등)를 토대로 전문 업 체에서 제작한 지도를 사용하였다. 이러한 지도는 주로
그림 1. 사용지도 구조
Fig. 1. Structure of the used map.
그림 2. 사용 지도 예시
Fig. 2. Example of the used map.
3D 네비게이션 및 LBS(Location Based Service) 등의 응용 목적으로 제작된다.
2-2 M&S 시나리오
채널 분석 M&S는 크게 2가지 목적으로 M&S를 수행 한다. 첫 번째 목적은 위성단말이 운영되는 지역에서 위 성 신호의 음영 지역을 분석하여 데이터베이스를 제작하 는 것이고, 두 번째 목적은 앞서 획득된 데이터베이스를 이용하여 OTM 위성단말의 모뎀 및 데이터 전송 프로토 콜 설계에 활용할 수 있도록 OTM 위성 채널의 특성을 분 석하는 것이다.
본 M&S에서는 표 1에서 알 수 있듯이 지도 데이터의
한계로(숲: 20 m 해상도) 인해 나무 등의 숲에 의한 음영 지역(shadowing)이 모의되지 않기 때문에도심지만을 대상 으로 M&S를 수행하고, 획득된 수신 프로파일(received sig- nal profile)에 대해 통계적 분석을 수행하였다.
한편, 경로 이동에 따른 비콘 신호의 수신 레벨 프로파 일은 채널 특성을 대표할 수 있는 지역 유형 단위로 M&S 를 수행해야 하지만, 본 논문에서는 연구소가 위치하고 지형에 익숙하며, 더불어 지도 데이터의 비용을 고려하여 분석대상 지역을 대전지역의 도심지에 한정하였다.
대전 도심지로는 둔산 선사유적지 주변을 선택하였으 며, 이 지역은 아파트 및 상업빌딩으로 구성되어 있어 빈 번한 음영구간이 발생하는 곳으로 도심지의 채널 특성을
구분 규격
대상 지역 대전 지역
해상도 2M 급
제작 년도 2004년~2006년
지도 layer
2D image 지도 1:50,000 축적
DTM 2M 해상도
클러터 강, 숲 등 20M 해상도
클러터 3D 빌딩 등 2M 해상도
표 1. 사용지도 상세규격
Table 1. Specification of the used map.
잘 반영할 수 있을 것으로 판단하였다.
2-2-1 음영 지역 분석
음영 지역 분석은 OTM 단말이 이동할 수 있는 모든 영역에 대한 수신 전계강도를 분석하여 정상적인 통신이 불가능한 위성 신호의 음영 지역을 식별하고, 그 결과를 DB로 생성하는 것이다. 이를 위해 HTZ warfare의 위성 커버리지(satellite coverage) 분석 기능을 통해 대상 지역 에 대한 수신 전계강도를 계산한다. 위성 신호의 수신 전 계강도를 M&S할 때 적용되는 채널 모델은 ITU-R P.618- 5이며, 여기에는 자유공간 손실을 비롯하여 대기 가스, 강우/구름, 다중경로 페이딩, 먼지 등 위성채널의 여러 손 실 인자들이 정의되어 있다[9].
그림 3. 위성 커버리지 분석 예시
Fig. 3. Example of satellite coverage analysis.
그림 3은 둔산 선사유적지 주변 지역의 위성 커버리지 분석 결과를 제시한다. 지도상에서 흰색으로 표시된 지역 은 위성신호의 수신이 불가능한 지역을 의미한다. 도로상 의 음영 지역은 도로 색이 어두운 관계로 수신가능 지역 보다 밝게 표시된다. 위성 커버리지 분석기능은 비콘신호 가 정상으로 수신되는 지점과 수신이 차단되는 장애물 (blockage) 음영 지점에 해당하는 2단계의 신호 레벨로 균 일하게 계산한다. 즉, LOS가 확보되는 지점은 위성과 해 당 지점 간의 거리와 대기에 의한 신호 감쇄가 일정하게 반영되고, 산이나 건물 등에 의해 음영구역이 발생되는 지점은 표시 가능한 최저 레벨로 균일하게 계산된다. 그 러나 숲과 같은 클러터 지점은 해당 클러터 속성에 정의 된 감쇄값이 적용되지만, 둔산 선사유적지 주변에는 클러 터로 지정된 영역은 없다.
위성 커버리지 분석은 위성 중계기가 송신하는 비콘 신호를 대상으로 한다. 위성 중계기 제원은 무궁화 5호 위성의 제원을 적용하였고, 위성의 송신 신호는 K 대역 의 비콘 신호 제원을 이용하였으며, 수신단말의 안테나 높이는 실제 위성단말에 탑재된 안테나의 높이인 2 m를 적용하였다.
커버리지 분석 결과는 지도상의 모든 좌표마다 지표면 에 수신되는 비콘 신호의 레벨이 계산되므로 생성된 데 이터베이스는 지도상의 좌표에 대한 비콘 신호의 수신레 벨 정보를 포함한다. 생성된 음영 지역 데이터베이스는 위성 수신율이 높은 경로를 찾을 수 있는 경로탐색 기능 에 활용이 가능하다.
HTZ warfare에서는 대전의 도심지 즉, 그림 3에서 표시 된 경로이동에 따른 수신 프로파일 생성까지만 수행한다.
HTZ warfare에서 생성한 수신 프로파일을 이용하여 통계 적 분석을 수행함으로써 OTM 단말의 채널 특성을 분석 하였다.
2-2-2 OTM 단말 채널 특성 분석
OTM 단말의 채널 특성 분석을 위해서는 실 운용 상황 에서 발생될 수 있는 링크 단절의 발생 빈도와 단절 시간 등의 정보를 갖는 수신 프로파일 확보가 필요하다. 본 논 문에서는 앞서 제안한 음영 지역 분석 방식을 이용하여 그림 3의 경로에 대한 수신 프로파일을 획득하였고, 이를
그림 4. 데이터 분석을 위한 용어 정의 Fig. 4. Data description for terminology.
이용하여 채널환경에 대한 통계적 분석을 수행하였다.
앞서 언급하였듯이 OTM 위성단말 무선 환경의 가장 큰 특징은 장애물(blockage)의 지속적이고 랜덤한 발생이 다. 따라서 이를 통계적으로 분석하려는 많은 시도들이
있었다[2]~[8]. 이러한 모델링 방법들의 근간에는 개념적으
로 이해하기 쉽고 수학적으로 사용하기 간단한 Markov 모델을 이용하고 있다. Gilbert는 통신선로에서 버스트 오 류현상을 설명하기 위해 Markov 모델을 사용하였고[6], 위 성통신에서 쉐도잉에 의한 신호의 손실이 통신선로의 버 스트 오류현상과 유사한 환경임을 알 수 있다.
한편, Markov 모델의 수정 형태인 Gilbert 모델 또한 제 안되었지만[5], Gilbert 모델의 경우 좀 더 수학적인 개념으 로 직관적이지 못하므로, 본 논문에서는 좀 더 단순하면 서도 직관적인 Markov 모델을 이용하여 채널환경을 분석 하였다.
통계적 분석을 논하기 전에, 앞으로 제시될 용어에 대 해 이해를 돕기 위해 비콘 수신신호 그래프를 용어들이 의미하는 바와 함께 그림 4에 나타내었다[7].
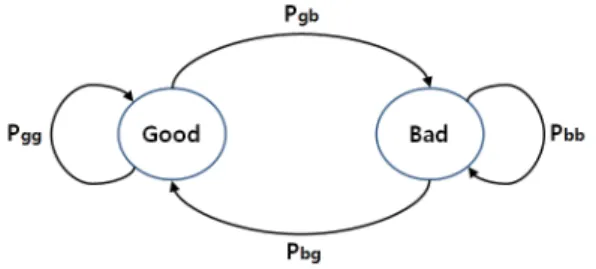
Markov 모델은 채널의 상태(state)를 수신신호의 특정 임계값(threshold)을 기준으로 수신 신호가 임계값 이상인 상태를 Good, 반대로 임계값 이하인 상태를 Bad, 두 가지 상태로 구분하며, 두 상태는 그림 5와 같이 천이 확률 pgb, pbg로 연결된다. 현재의 채널이 Good 상태일 때 다음 상태 도 Good일 확률이 pgg이고, Bad로 상태로 천이될 확률이
그림 5. Two-state Markov 모델 Fig. 5. Two-state Markov model.
pgb이며, 이다. 마찬가지로 이다.
Good 상태 평균 유지거리 ACD(Average Connection Duration) 및 Bad 상태 평균 유지거리 AFD(Average Fade Duration)는 천이 확률과 다음의 관계를 갖는다[7].
(1)
(2)
또한 쉐도잉의 시간적 비율을 나타내는 는 다음의 관계를 갖는다[7].
(3)
마지막으로 Complementary CDF를 다음과 같이 유도할 수 있다[4].
P r
(4)
P r
(5) 2-3 K대역 실 채널환경 분석
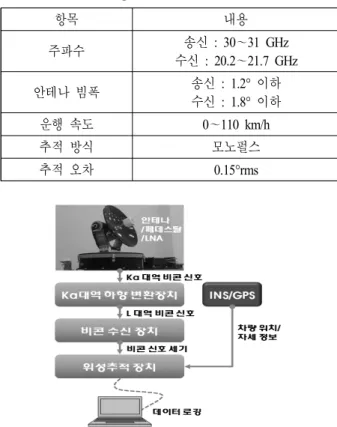
국방과학연구소에서는 위성신호를 이동 중 송수신할 수 있는 OTM 위성단말을 개발하였다. 이를 이용하여 향 후 국내 환경에서 운용이 적합한 고속 이동형 단말 개발 을 위한 K 대역의 채널 특성 자료를 제공하기 위해 이동 중 위성신호 측정 시험을 수행하였다.
OTM 위성단말은 차량에 탑재되며, 고속 기동 간, 정지 간에 위성 중계기와 연동 가능한 안테나 및 RF 송수신 장
항목 내용
주파수 송신 : 30~31 GHz
수신 : 20.2~21.7 GHz
안테나 빔폭 송신 : 1.2° 이하
수신 : 1.8° 이하
운행 속도 0~110 km/h
추적 방식 모노펄스
추적 오차 0.15°rms
표 2. OTM 단말 주요 제원[7]
Table 2. The main specifications of OTM terminal[7].
그림 6. OTM 위성단말 수신경로 블록도
Fig. 6. Block diagram of receiving path in OTM terminal.
치를 이용하여 고출력의 위성신호를 송출하고, 위성을 경 유한 수신 신호를 처리하도록 운용된다. 실험에서 사용된 OTM 위성단말의 제원을 표 2에 나타내었다.
OTM 위성단말은 무궁화 5호 위성으로부터의 비콘 신 호 세기를 측정함으로써 수신대역의 채널 특성을 분석하 였다. 미약한 비콘 신호의 신호 대 잡음비(SNR)를 확보하 기 위해 500 Hz 대역폭을 갖는 비콘 수신기를 이용하여 측정하였으며, 측정된 수신 신호의 신호 대 잡음비는 약 40 dB 이상이었다. 측정 시스템의 구성도는 그림 6과 같다.
대전 도심지로는 그림 3의 지역과 동일한 둔산 선사유 적지 주변을 선택하여 측정하였다. 수집된 데이터는 2013 년 6월 맑은 날씨에 측정되었으며, 샘플링 주파수는 100 Hz, 차량의 평균 속도는 13 km/h(최대 49.2 km/h)였다. 시 험 중 기록된 데이터는 다음과 같다.
그림 7. 측정 이동 경로
Fig. 7. Routing path for measurement.
- 차량 속도: GPS와 연동하는 INS(Inertial Navigation System)로부터 획득
- 3축 각속도: 자이로 센서로부터 획득 - 3축 각위치: 엔코더 정보로부터 획득 - 비콘 신호 세기: 비콘 수신장치로부터 획득 그림 8은 그림 7의 둔산 선사유적지 부근에서 측정된 수신신호 전력 변화를 거리에 따라 표시하는 공간 영역 분석 방법을 이용하여 나타낸 그래프이다[7]. M&S 결과와 직접 비교를 위해 샘플 거리 간격은 2 m로 설정하였다.
경로별 특성은 그림 7과 그림 8에서 확인할 수 있듯이 ① 구간은 남북 방향의 폭이 넓은 도로이므로 위성통신을
그림 8. 거리에 따른 수신 프로파일 Fig. 8. Received signal profile vs distance.
위한 장애물이 없는 위성통신 환경이며, ② 구간은 건물 에 의한 통신 장애가 빈번히 발생함을 알 수 있다. 특히 건물에 의한 음영 지역은 일부 가장자리(shadow edge)를 제외하고, LOS 신호가 완전히 블로킹됨을 알 수 있다.
③ 구간의 경우, ① 구간과 지형적 특성이 유사하나, 도 로 폭이 좁아 신호등, 가로등의 일부 영향이 있으며, ④ 구간의 경우, 가로수에 의한 음영 지역이 발생함을 알 수 있다. 가로수에 의한 영향은 건물에 의한 영향과 비교시 페이딩 수준은 작지만, 매우 빈번한 특성을 갖는다. 이러 한 현상은 무궁화 5호 위성의 위치-동경 113°-에 기인하 며, 동서방향의 도로에서 남쪽에 높은 건물이 위치한 경 우 음영구역이 빈번히 발생하고, 남북방향의 도로에서는 건물에 의한 영향이 줄어들고, 신호등, 표지판의 영향이 상대적으로 커짐을 예상할 수 있다.
Ⅲ. 분석 결과
Ⅱ장에서 M&S 방법과 실측정 데이터의 측정방법을 각각 설명하였다. 본 장에서는 각각의 방법에서 획득된 수신레벨 프로파일을 이용하여 데이터의 일치율를 비교 분석한다. 비교방법은 크게 두 가지로 분류할 수 있다. 하 나는 수신레벨 프로파일의 일치율을 직접 비교하는 것이 고, 다른 하나는 개별 데이터의 통계적 분석 결과를 비교 하는 것이다.
그림 9. 수신 프로파일 비교(threshold=—5 dB)
Fig. 9. The comparison between received signal profiles(th- reshold=—5 dB).
그림 10. 수신 신호 전력의 complementary CDF Fig. 10. Complementary CDFs for received signal power.
3-1 수신레벨 프로파일 비교
수신레벨 프로파일의 일치율에 대한 비교방법은 간단 하다. 앞서 설명하였듯이 M&S 결과와 실 측정 결과, 모 두 샘플거리를 2 m로 설정하였으므로 각 샘플의 일치 정 도를 백분율로 나타낼 수 있다.
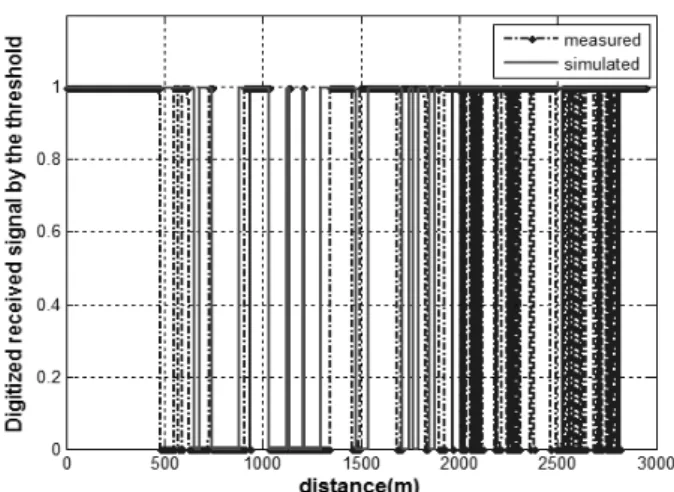
그림 9는 이동거리를 기준으로 측정 데이터와 모의한 데이터를 함께 나타내었다. 측정 데이터는 임계값을 —5 dB 기준으로 설정하였다. 이는 가로수, 신호등 등과 같은 높은 빈도의 낮은 수준 페이딩을 배제하기 위함이다.
그림 10은 임계값에 따른 측정 수신신호의 CCDF를 나 타낸 것으로, 임계값 —5 dB 설정 기준으로 약 64.86 % 수준으로 수신이 가능한 환경임을 알 수 있다.
그림 9에서 모의실험과 실 측정 실험의 수신 프로파일 일치율은 약 74.8 %이다. 이러한 오차의 발생은 다음의 원인으로 분석된다.
(1) 지도의 정확도: 지도의 정확도에 영향을 주는 주요 요소는 지도의 해상도와 지도의 제작연도로 나뉠 수 있다. 표 1에서 알 수 있듯이 본 논문에서 사용 된 3D 지도의 해상도는 2 m 급으로서 음영 지역이 2 m 이상 차이가 날 수 있음을 의미한다. 또한, 3D 지도의 제작연도는 2006년으로 2013년 측정 당시 와 차이가 있을 것으로 충분히 예상할 수 있다.
(2) 수풀, 가로수, 신호등 등 소형 지형지물 영향: 3D
지도에서는 건물 이외에 수풀, 가로수, 신호등 등의 소형 지형지물은 반영이 되어 있지 않기 때문에 어 느 정도의 오차는 불가피하다. 물론 실제 이를 측 정하여 지도상에 반영할 수 있으나, 임의의 곳에서 분석이 필요한 모의실험의 의미를 고려하면 불필 요한 방법일 수 있다.
(3) 경로 오차: GPS 오차에 의해 측정을 수행한 실제 경로를 지도상에 정확히 표기하기가 어렵다. 더욱 이 GPS 좌표는 도심에서 다중경로 영향으로 오차 범위가 더 커지므로 GPS 정보의 정확도는 어느 도 로상에 있는지 대략적인 위치만 파악할 수 있는 정 도가 된다. 따라서 모의실험에서 설정한 경로는 도 로의 중앙선을 기준으로 진행 방향의 중심을 경로 좌표로 설정하였으며, 도로 폭이 큰 경우 수신경로 프로파일에 영향을 미칠 수 있다.
(4) 위에서 언급한 주된 원인 이외에도 위성의 실제 위 치에 의한 오차, 건물의 모양에 의한 오차 등이 있 다[1].
그림 11은 그림 8에서 가로수에 의한 영향을 배제했을 때의 수신 프로파일 비교 결과를 나타낸다. 즉, ④ 구간의 가로수에 의한 음영 지역을 배제한 경우를 의미하며- ④ 구간은 진행방향의 오른쪽이 공원지역으로 건물이 없음- 이 경우 일치율이 84.4 %로서 약 10 % 정도 증가함을 보 였다.
그림 11. 수신 신호 전력의 complementary CDF Fig. 11. Complementary CDFs for received signal power.
임계값(dB) 일치율(%)
(가로수 포함) 일치율(%)
(가로수 배제)
—5 74.8 84.4
—10 78.2 85.1
—15 83.3 88.1
—20 86.8 89.8
표 3. 임계값에 따른 수신 프로파일의 일치율
Table 3. Matching ratio between received signal profiles vs threshold.
한편, 실 측정 신호의 프로파일에서 임계값을 낮추는 경우에도 일치율은 증가하였다. 이는 지도상에는 표현되 지 않는 수목, 가로등, 표지판 등의 낮은 수준의 페이딩이 음영 지역으로 분석되는 오류를 임계값을 낮게 설정함으 로써 방지할 수 있기 때문으로 판단된다. 표 3은 임계값 에 따른 일치율을 나타낸다.
3-2 통계적 분석 결과 비교
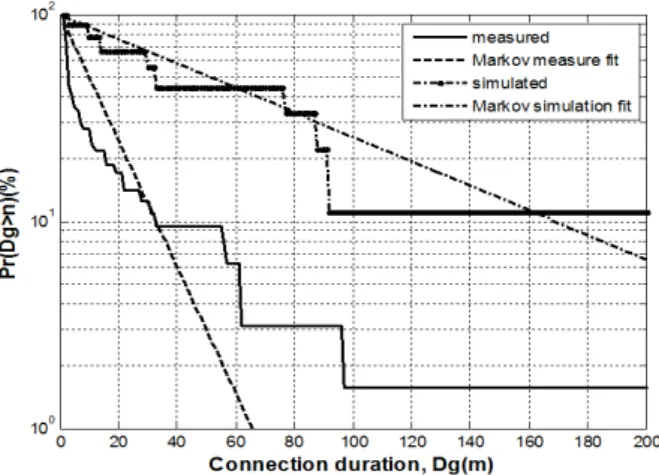
수신 프로파일에서 임계값(—5 dB)을 선정 후, Connec- tion duration과 Fade duration을 계산하고, 이로부터 평균값 인 ACD, AFD를 계산할 수 있다. 또한, 계산된 ACD, AFD 로부터 식 (1), 식 (2)를 이용하여 천이 확률 , 값을 계산할 수 있다. 이 값은 다시 , 로 변환되고, 식 (4), 식 (5)를 이용하여 그림 12와 그림 13에 측정된 값의 CCDF 분포와 함께 나타내었다. M&S 결과로부터 얻어진
그림 12. Connection duration의 CCDF(가로수 포함) Fig. 12. CCDF of connection duration(including trees).
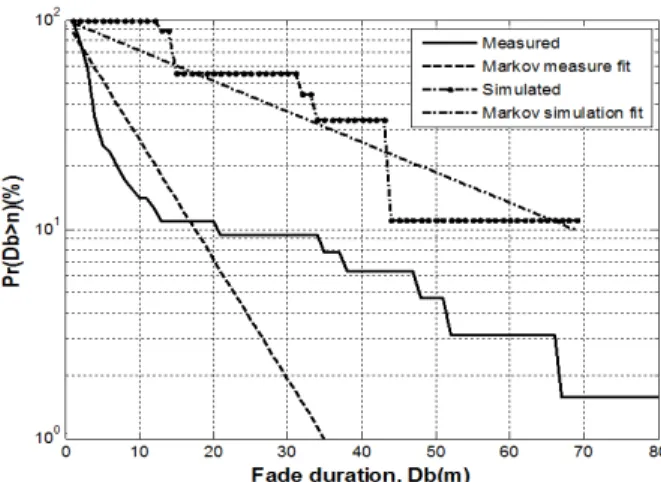
그림 13. Fade duration의 CCDF(가로수 포함) Fig. 13. CCDF of fade duration(including trees).
수신 프로파일 분석도 동일한 방법을 적용하여 그림 12 와 그림 13에 나타내었다. 각 그림의 세로축은 확률 값으 로써 백분율로 나타낸다.
그림 14, 그림 15는 실 측정 수신 프로파일에서 그림 9 의 ④구간 즉, 가로수에 영향을 받는 구간을 배제하였을 때의 통계적 특성을 나타낸다. 앞서 수신 프로파일을 직 접 비교한 결과와 같이 가로수 영향을 배제한 수신 프로 파일의 통계적 특성 또한 모의실험 통계적 특성에 좀 더 유사함을 알 수 있다. 따라서 가로수 등의 소형 지형지물 의 영향이 상대적으로 적은 대도시의 도심지에서는 모의 실험 분석이 유용할 수 있음을 알 수 있다.
그림 12~15로부터 모의실험에서 얻어진 통계적 특성 과 실 측정에서 얻어진 통계적 특성에 일정 부분 차이가 있음을 알 수 있으므로 모의실험 및 실 측정 수신 프로파 일 분석에서 얻어지는 Markov 모델의 파라미터를 표 4~
6에 나타내었다. 표 4는 모의실험으로부터 얻어진 Mar- kov 모델 파라미터를 제시하였고, 표 5와 표 6은 실 측정 수신 프로파일로부터 얻어진 Markov 모델 파라미터를 제 시한 것으로, 표 6의 자료는 그림 9의 ④구간에서 가로수 영향을 배제하였을 때 결과를 나타낸다. 앞서 언급하였듯 이 표 6의 파라미터 값들이 표 5의 파라미터 값들보다 모 의실험 파라미터에 더 근접함을 알 수 있다.
모의실험 파라미터를 실 측정 파라미터의 임계값에 따 른 결과와 비교하기 위해 표 5와 표 6에서는 실 측정 수 신 프로파일의 Markov 모델 파라미터 값을 임계값 별로
그림 14. Connection duration의 CCDF(가로수 배제) Fig. 14. CCDF of connection duration(excluding trees).
그림 15. Fade duration의 CCDF(가로수 배제) Fig. 15. CCDF of fade duration(excluding trees).
항목 ACD
(m)
AFD
(m)
값 73.8889 30.3333 0.2910
표 4. 모의실험 Markov 모델 파라미터
Table 4. Markov model parameters for the simulation.
제시하였다. 더불어 실 측정 파라미터 값이 모의실험 파 라미터 값에 가장 근접한 경우에 이탤릭체로 표시하였다.
그러나 모의실험의 값과 근접한 ACD, AFD, 의 값이 불규칙하여 이로부터 의미 있는 규칙을 발견하지 못하였 다. 다만 임계값과 Markov 모델 파라미터의 상관관계는
임계값 (dB)
ACD (m)
AFD
(m)
—5 14.7385 8.1094 0.3549
—10 17.1356 8.0345 0.3192
—15 18.0883 6.6441 0.2687
—20 26.4884 8.0476 0.2330
표 5. 실 측정시험 Markov 모델 파라미터(가로수 포함) Table 5. Markov model parameters for the measurement
including trees.
임계값 (dB)
ACD (m)
AFD
(m)
—5 91.6667 34.2727 0.2721
—10 74.1333 26.0714 0.2602
—15 50.3043 14.5455 0.2243
—20 69.5882 18.3750 0.2089
표 6. 실 측정시험 Markov 모델 파라미터(가로수 배제) Table 6. Markov model parameters for the measurement ex-
cluding trees.
표 3의 수신 프로파일의 일치율과 임계값과의 상관관계 와는 다르다는 것을 알 수 있다.
Ⅳ. 결 론
본 논문에서는 지도의 선택, 경로 선정, 음영 지역 분석 후 위성채널 통계적 특성으로 이어지는 분석방법을 제시 하였다. 이 방법은 한정된 예산 및 기간 내에서 위성채널 의 실제 측정 없이 위성채널 특성을 분석하는데 매우 효 과적이라 판단한다. 더불어 제시된 방법의 정확도 분석을 수신 레벨 프로파일과 통계적 분석 결과를 비교하는 2가 지 방안을 제시하였다.
대전 도심지 둔산 선사유적지 부근의 환경을 3D 지도 를 이용하여 HTZ warfare에서 모의실험을 수행하였고, 이 로부터 수신프로파일을 생성하여 Markov 모델 파라미터 값을 계산하였다. 그리고 실 측정에서 얻어진 수신 프로 파일과 프로파일 자체 및 Markov 모델 파라미터 값을 서 로 비교하였다.
수신 프로파일의 일치율은 74.8 %였으며, 모의실험에 서 고려되지 않는 가로수 영향을 실 측정 수신 프로파일
에서 배제하면 84.4 %의 일치율을 보였다. 더욱이 실 측 정 Markov 모델 파라미터 값도 모의 실험 결과값에 근접 함을 확인할 수 있었다.
한편, 임계값에 따른 영향성을 확인한 결과, 수신 프로 파일 일치율은 임계값을 낮출수록 일치율이 증가한 반면, Markov 모델 파라미터 값과 임계값의 관련성을 확인하기 에는 데이터의 양이 부족하였다.
3D 지도를 이용한 위성채널 분석은 분석 결과의 한계 에도-지도의 정확도, 가로수 등 소형 지물 영향, 경로오차 등- 불구하고 열악한 도심지환경에서 운용되는 이동형 단말을 위한 모뎀 설계 즉, 패킷 전송 시스템의 프레임 길 이, 코딩 구조, 버퍼 크기, 인터리버 깊이 등의 설계 등에 효율적인 도구로써 역할을 수행할 수 있을 것으로 판단 된다. 더불어 위성통신에 사용되는 위성 궤도에 따른 통 신채널 특성 비교에서도 유용한 방법이 될 것이다.
본 논문에서는 3D 지도의 음영 지역을 분석하기 위해 HTZ warfare 프로그램을 이용하였다. 따라서 HTZ warfare 프로그램에서 지원하는 채널 모델에 의존할 수밖에 없는 한계점 또한 가진다. 향후 좀 더 정확한 분석을 위한 통계 적 채널 모델 및 회절 모델적용에 대해 연구가 필요하다.
References
[1] Matthew D. Brennan, W. Mark Smith, "Generalization of channel blockage profiles for satcom on-the-move using 3-D models", Military Communications Conference, Mil- com, 2006.
[2] J. B. Schodorf, "EHF satellite communications on the move: Baseband considerations", MIT Lincoln Lab. Te- chnical Report TR-1055, Feb. 2000.
[3] R. K. Crane, A. W. Dissanayake, "ACTS propagation ex- periment: Attenuation distribution observations and pre- diction model comparisons", Proceedings of the IEEE, vol. 85, no. 6, p. 891, Jun. 1997.
[4] J. B. Schodorf, "EHF satellite communications on the move: Experimental results", MIT Lincoln Lab. Techni- cal Report TR-1087, Aug. 2003.
[5] W. M. Smith, "Channel characterization for EHF satellite
communications on the move", MIT Lincoln Lab. Tech- nical Report TR-1109, Jul. 2006.
[6] E. N. Gilbert, "Capacity of a burst-noise channel", Bell System Technical Journal, pp. 1253-1265, Sep. 1960.
[7] 권건섭, 허종완, 황기민, 임철민, 유흥균, "이동형 위성 단말을 위한 20 GHz 대역 채널 특성 분석", 한국전자 파학회논문지, 25(2), pp. 223-234, 2014년 2월.
[8] F. Perez Fontan, P. Marino Espineira, Modeling the Wi- reless Propagation Channel A Simulation Approach with MATLAB, Wiley, 2008.
[9] Propagation data and prediction methods required for the design of earth-space telecommunication systems, ITU-R, pp. 618-10, Oct. 2009.
[10] T. M. Cover, J. A. Thomas, Elements of Information Theory, New York, NY: Wiley, 1991.
[11] G. E. Corazzo, F. Vatalaro "A statistical model for land mobile satellite channels and its application to nongeo- stationary orbit system", IEEE Trans. Vehicular Tech., pp. 738-742, Aug. 1994.
권 건 섭
1997년 2월: 한양대학교 전파공학과 (공학 사)
1999년 2월: 한양대학교 전파공학과 (공학 석사)
2006년~현재: 국방과학연구소 연구원 2012년~현재: 충북대학교 전자공학과 박
사과정
[주 관심분야] 위성통신 시스템, 통신 신호 처리, 안테나/RF 설 계
허 종 완
1994년 2월: 충남대학교 전자공학과 (공학 사)
1996년 2월: 충남대학교 전자공학과 (공학 석사)
1996년 1월~현재: 국방과학연구소 연구원 [주 관심분야] 위성통신 시스템
황 기 민
2000년 2월: 경북대학교 전자공학과 (공학 사)
2002년 2월: 경북대학교 전자공학과 (공학 석사)
2002년 1월~현재: 국방과학연구소 연구 원
[주 관심분야] 위성통신 시스템, 협력통신
백 성 호
2005년 2월: 인하대학교 컴퓨터공학과 (공 학사)
2004년 12월~현재: LIG넥스원(주) 연구원 [주 관심분야] 위성통신단말 운용 S/W 및
시스템 설계
유 흥 균
1988년~현재: 충북대학교 전자공학과 교 수
2002년 3월~2004년 2월: 충북대학교 컴 퓨터정보통신연구소 소장
1996년~현재: IEEE, IET 논문 심사위원 2002년: 한국전자파학회 학술상 수상 2008년: ICWMC 2008 국제학술대회 "Best Paper Award" 수상
2009년: SPACOMM 2009 국제학술대회 "Best Paper Award" 수 상
[주 관심분야] 무선통신시스템, B4G/5G 이동통신 시스템, 위성 통신, 통신회로 설계 및 통신 신호 처리