Trans. Korean Soc. Mech. Eng. A, Vol. 40, No. 2, pp. 229~236, 2016 229
<응용논문> DOI http://dx.doi.org/10.3795/KSME-A.2016.40.2.229 ISSN 1226-4873(Print) 2288-5226(Online)
다물체 동역학 해석을 통한 포의 사격정확도 분석
진재훈* · 정사무엘* · 김태윤* · 김영구** · 안창기*** · 유완석*†
* 부산대학교 기계공학부, ** 두산 DST, *** 스페이스솔루션
Accuracy of Fire of a Mortar via Multibody Dynamics Analysis
Jae Hoon Jin*, Samuel Jung*, Tae Yoon Kim*, Young Ku Kim**, Chang Gi Ahn*** and Wan Suk Yoo*†
* School of Mechanical Engineering, Pusan Nat’l Univ.,
** Doosan DST., *** Space Solution.
(Received August 10, 2015 ; Revised November 30, 2015 ; Accepted December 7, 2015)
- 기호설명 -
α
: 포탄의 회전방향 각가속도Ft : 강선에 의한 접선력
Tt : 강선에 의한 접선토크
n : 캘리버 수
d : 포열의 직경
Ixx : 포탄의 회전방향 관성모멘트
a : 포탄의 진행방향 가속도
m, c, k : 질량, 감쇠계수, 스프링상수
ɺɺx, xɺ, x : 가속도, 속도, 변위
fd : 감쇠 고유진동수
kt : 비틀림스프링상수
J0 : 질량관성모멘트
ω
n,
ω
d : 비감쇠고유진동수, 감쇠고유진동수ζ : 감쇠비
ct
, ct c, : 감쇠상수, 임계 감쇠계수
froll
, fpitch : 엔진 가진진동수
1. 서 론
자주박격포는 보병에 의해 운용되는 도수운반 박격포와 달리 박격포를 전투차량에 탑재한 무기 체계이다. 자주박격포는 도수운반 박격포에 비해 Key Words: Self-Propelled Mortar(자주박격포), Multibody Dynamic Analysis(다물체동역학 해석), Interior
Ballistic(강내탄도학), External Ballistic(강외탄도학), Accuracy of Fire(사격정확도)
초록: 본 연구에서는 자주박격포의 다물체동역학 모델을 만든 뒤, 포탄의 탄도학을 고려하여 시뮬레이 션 하였다. 자주박격포 모델은 박격포 모델 및 차량 모델로 구성하였으며, 상용 다물체 해석 프로그램인 RecurDyn 을 사용하였다. 차량 모델은 6 자유도 강체플랫폼으로 모델링 하였으며, 박격포 발사 직후의 움직임에는 강내탄도학을 적용하였다. 강내탄도학 해석의 결과를 바탕으로, 포신을 떠난 후의 강외탄도 해석을 수행하였다. 몬테카를로 기법을 활용한 반복 해석으로 발사각과 차량 동특성에 의한 변동이 고 려된 탄착점의 분산도를 구하여 사격정확도를 제시하였다.
Abstract: For this research, the trajectory of a projectile was simulated via the multibody dynamics analysis of a self- propelled mortar. The dynamic model was composed of a mortar model and a vehicle model, and was simulated using the RecurDyn program. Interior ballistic was applied to the mortar model, and exterior ballistic was conducted by Matlab using the simulation results of the interior trajectory. Through repetitive Monte-Carlo simulations, the accuracy of the mortar was analyzed by considering variations in the aiming angle and vehicle dynamic response.
† Corresponding Author, [email protected]
Ⓒ 2016 The Korean Society of Mechanical Engineers
높은 기동성 장의 화력 요구에 능하게 한다 능하여 방어력도 치 및 항법장치 가 향상되어 이와 같은
용 중이며 국내에서도 국내 화포
전산해석으로
다.(2,3) 본 연구에서는
제안하고 시뮬레이션 분석한 뒤,
도에 미치는 차량 탑재에 여 실모델 개발 것으로 예상
동역학 모델은 램인 Recru- 바탕으로 강내 되었으며, 몬테카를로 이용하여 탄착점의 전체적인 연구
2.1 박격포 Fig. 2에는
Fig.
기동성을 가지고 요구에 대하여 한다. 또한 적으로부터 방어력도 우수하다 항법장치 등을 장착하여
되어 화력 또한
장점으로 해외에서는 국내에서도
포 연구의 경우 전산해석으로 탄도를 예측하
연구에서는 자주박격포의 시뮬레이션을
사격오차와 미치는 영향을 알아 탑재에 따른 성능
개발에 필요한 예상된다.
모델은 상용 -Dyn(4)으로 강내탄도학 및
몬테카를로 탄착점의 분산도 연구 프로세스를
2. 박격포
박격포 모델의 구성 에는 차량을 배제한
강내탄도(
- 박격포 - 차량 - 강내탄도
강외탄도 - 강체해석법 - 강외탄도
사격정확도 - 몬테카를로 - 사격정확도
Fig. 1 Flow chart of the research 있으며, 높은 대하여 즉각적인
적으로부터 신속한 우수하다. 최근에는
장착하여 발사속도와 또한 우수한 것으로
해외에서는 자주박격포를 개발이 진행
경우 강내탄도의 예측하는데 연구를 자주박격포의 을 통해 포탄의
차량의 동특성이 알아보았다.
성능변화의 예측을 필요한 시간과 비용을
다물체 동역학 개발되었다.
및 강외탄도학 기법(Monte- 분산도를 예측하였 프로세스를 보여준다
박격포 모델링
구성
배제한 박격포
(RecurDyn) 박격포 모델링
차량 모델링 강내탄도 해석
강외탄도(Matlab) 강체해석법 강외탄도 해석
사격정확도 예측 몬테카를로 기법 사격정확도
Flow chart of the research
높은 기동성은 즉각적인 지원사격을 신속한 퇴각이 최근에는 사격통제장
발사속도와 정확도 것으로 평가된다
자주박격포를 진행 중이다.
탄도의 수학모델과 연구를 집중하였 자주박격포의 동역학 모델을 포탄의 사격정확도를 동특성이 사격정확 이는 박격포의 예측을 가능하게
비용을 감소시킬 동역학해석 프로그 . 동역학 모델을 학 해석이 수행 -Carlo method) 하였다. Fig. 1 보여준다.
모델링
박격포 체계를 나타내
Flow chart of the research
기동성은 전 지원사격을 가 퇴각이 가 사격통제장 정확도 다.(1) 자주박격포를 운 수학모델과
집중하였 모델을 격정확도를 사격정확 박격포의 가능하게 하
감소시킬 프로그 모델을
수행 Carlo method)을
g. 1은
나타내 고 열(b 치(a 포열을 을
고각장치는 는
회장치 한
2 박격포 졌다 joint) 로 조인트 사이에 와 결되어 조인트
고각장치의 어
다.
포신과 지지한다 속되어 다.(5) 포열과 의
2.
포탄이 어나는
있다. 이 시스템 barrel), 고각장치 azimuth aiming device) 포열을 포함하여
격발시켜 사격 고각장치는 포의
포의 방위각을 회장치의 각도
조준이 가능하다 2.2 구속관계 박격포 모델의 졌다. 포신은
oint), 선회장치 연결되어 지지 조인트(Translational 사이에는 병진
하부로 나뉘며 결되어 있고 하부는 조인트(Cylindrical
고각장치의 상부와 있어 병진 이동을 . 선회장치는 포신과 z 축 방향 지지한다. 또한 속되어 회전운동을
(5) 이에 따라 포열과 포신 사이의
y 축 회전의 2.3 포탄추진력 포탄이 강내에서 어나는 순간까지
Fig. 2 Joint c
시스템은 크게
고각장치(elevation aiming device) zimuth aiming device)로
포함하여 박격포의 사격이 가능하게 포의 고각을 조절 방위각을 조절하여
조절을 통하여 가능하다.
의 구속관계는 고각장치에
선회장치의 z 축에 회전조인트 지지된다. 또한
(Translational joint)로 이동이 존재한다 나뉘며 상부는 포신과
하부는 선회장치와 (Cylindrical joint)로 연결되어
상부와 하부는 이동을 통하여 고각장치와 방향 회전조인트로
차량과 y 축 회전운동을 통하여
따라 박격포 모델은 사이의 병진,
3 자유도를 포탄추진력
강내에서 움직이기 순간까지 일련의 해석
Joint constraints
크게 포신(mortar body) levation aiming device)
로 구성되어 있다 박격포의 몸체를 구성하며
가능하게 해주는 조절하여 주며 하여 준다. 고각 통하여 목표하는
는 Fig. 2와 같이 고각장치에 구면조인트
회전조인트(Revolute 또한 내부의 포열과
로 연결되어 포신과 존재한다. 고각장치는
포신과 구면조인트로 선회장치와 z 축 방향의
연결되어 있다 하부는 병진조인트로
통하여 포의 고각을 고각장치와 z 축 방향
회전조인트로 연결되어 축 방향 회전조인트로 통하여 포의 방위각을
모델은 포신의 지면과 선회장치 가진다.
움직이기 시작하여 해석과정을
onstraints of the mortar model ortar body), 포 levation aiming device), 선회장 있다. 포신은 구성하며 포탄 해주는 장치이다.
며, 선회장치 고각장치 및 선 목표하는 타격에 대
같이 이루어 구면조인트(Spherical
(Revolute joint) 포열과 병진 포신과 포열 고각장치는 상부 구면조인트로 연 방향의 원통 있다.
병진조인트로 구속되 고각을 조절한 원통조인트, 연결되어 포신을 회전조인트로 구 방위각을 조절한 포신의 z 축 회전, 선회장치 사이
시작하여 포구를 벗 강내탄도학
of the mortar model 포 선회장 포신은
포탄 . 선회장치
선 대
이루어 (Spherical
oint) 병진 포열 상부
연 원통 구속되 조절한 , 포신을 구 조절한 , 사이
벗 학
이라고 한다 탄의 운동에 포탄이 격발되 성된 가스가 은 Fig. 3과 로 작용하며 터로부터 얻어진다 된 포의 발사 내압력과 강내 추진력을 구하였다 내었다. 포탄추진력은 함수를 이용하여
2.4 강선력 강내탄도에서 탄 진행방향
을 고속 회전시킨다 회전속도에
선력이 모델링 의 진행방향과 선력 Ft , 이 두고 포탄의 정하였다. Fig.
타낸 것이다 n 으로 계산 포탄이 1 회전 나타낸 단위 곱하면 식 길이를 구할
caliber length length
n d nd
revolution caliber revolution
강선에는 나선각 계를 나타내면
포탄의 진행방향 라고 하면 접선방향 는 αd/ 2와
2 tan 2 2
= = =
α
여기서 F 는d
한다. 강내탄도 운동에 지배적인
격발되었을 때 가 강내에 작용하는
같이 포탄을 며, 포탄추진력은
얻어진다. 강내압력은 발사 실험을 통
강내 단면적의 구하였다. 이는 포탄추진력은 실험 이용하여 모델에 강선력
강내탄도에서 강선은 진행방향에 수직하게
회전시킨다.
영향을 미치므로 모델링 되어야 진행방향과 수직한
이 힘에 의한 포탄의 회전에는
Fig. 5 는 포탄에 것이다. 접선력은
계산 가능하다.(7 회전할 때 이동한 단위[caliber/revolution]
(1)과 같이 포탄이 구할 수 있다.
caliber length length
n d nd
revolution caliber revolution
× =
나선각 φ가 나타내면 다음과
tan d
nd n
=π =π φ
진행방향 가속도를
접선방향 회전가속도는 / 2와 같다. 이를
tan
a⋅ =α
φ
2a tan 2 a 2
d nd nd m
= ⋅ φ = π = π
는 포탄추진력이며 다물체 해석에서는 영향을 미친다
추진장약이 작용하는 압력 포탄을 가속시키는
력은 강내압력의 강내압력은 압력센서
통해 측정되었 의 곱으로 시간에 이는 Fig. 4에
실험값이므로 모델에 적용하였다
강선은 포탄과 포열 하게 강선력을
. 강선은 포탄의
미치므로 동역학 한다. 강선에 방향으로 작용하는 한 토크를 접선토크
F t 와 Tt만 포탄에 작용하는
은 캘리버 수(
7) 캘리버 수란
이동한 길이를 evolution]이다.
포탄이 1 회전할
caliber length length
n d nd
revolution caliber revolution
× =
존재하는데 같다. d
nd n
=π =π
가속도를 a , 회전각가속도를
회전가속도는 이를 정리하면 다음과
2
⋅ =αd
2a tan 2 a 2 Fd
d nd nd m
= φ = π = π
포탄추진력이며 m 은
동역학 해석 는 강내압력이 미친다. 강내압력은
연소되면서 압력이다. 강내압력 가속시키는 포탄추진력으 강내압력의 수치 데이 압력센서가 설치 되었다. 측정된
시간에 따른 포탄 그래프로 나타 값이므로 Akima Spline
하였다.
포열 사이에서 발생시켜 포탄 포탄의 이동속도와 동역학 모델에도 강선에 의하여 포탄
작용하는 힘을 접선토크 Tt 라고 만 작용한다고 작용하는 Ft와 Tt를
(Caliber number) 수란 강선을 따라 를 구경의 배수로
n 에 구경 d 회전할 때 이동한
caliber length length revolution caliber revolution
(1)
φ와 nd 의
(2)
회전각가속도를 tan a⋅ φ이며 다음과 같다.
(3)
(4)
은 포탄의 질량이
해석을 통한 포의 이 포
강내압력은 면서 생 강내압력 포탄추진력으 데이 설치 측정된 강 포탄 나타 Akima Spline(6)
사이에서 포 포탄 이동속도와 모델에도 강 포탄 힘을 접 라고 작용한다고 가 를 나 number)
따라 배수로 d 를 이동한
(1)
의 관
(2)
회전각가속도를 α 이며 이
. (3)
(4)
질량이
Fig.
다.
따라서
F 에t
을 2.
포탄 밀려나는 좌운동 충격을 기 되었다 (8)로
포의 사격정확도
Fig. 3 Exhaust gases acting on the proje
Fig. 4 Variation of driving force with time
. 5 Tangential force and the projectile . 회전 축은 x
t xx t
T I F 따라서 F 와t Tt
2 xx 2 xx 4 xx
t
I I I F
F = d α = d nd m=
t t
T =F =
에 의한 T 는t 반영하였다. 2.5 주퇴복좌력 포탄 발사 시 밀려나는 주퇴운동 좌운동이 발생한다 충격을 저감시키고 위하여 포열과 되었다. 주퇴복좌기에
로 가정할 수
0 0.005
-200 0 200 400 600 800 1000 1200 1400
Force(kN)
사격정확도 분석
Exhaust gases acting on the proje
Variation of driving force with time
Tangential force and tangential the projectile
x방향이므로
t xx t 2
T =I α =F d
T 는t 다음과 같이 2Ixx 2Ixx 2 F 4 I Fxx
d d nd m
α π
= = =
2 2
xx
t t
I F T F d
= = πndm
는 동역학 모델에
주퇴복좌력
시 포열은 포탄추진력에 주퇴운동과 다시
발생한다. 박격포 저감시키고 포열을
포열과 포신 사이에 주퇴복좌기에 작용하는
수 있다.
0.005 0.01
Time(sec) Driving Force
Exhaust gases acting on the proje
Variation of driving force with time
angential moment acting on
방향이므로 T 는t 다음과
2 d
같이 정리할
2
2Ixx 2Ixx F 4 I Fxx
d d nd m nd m
= = = π
I Fxx
ndm
모델에 적용되어
포탄추진력에 의하여 다시 제자리로 돌아오는 박격포 모델에는 주퇴운동 포열을 발사 위치로
사이에 주퇴복좌기가 작용하는 주퇴복좌력은
0.015 0.02
Time(sec) Driving Force
231
Exhaust gases acting on the projectile
Variation of driving force with time
moment acting on
다음과 같다.
(5)
정리할 수 있다.
(6)
(7) 적용되어 강선력
의하여 뒤로 돌아오는 복 주퇴운동 시 위치로 복좌시키 주퇴복좌기가 설치 주퇴복좌력은 식
0.025
moment acting on
강선력
뒤로 복 시 복좌시키 설치 식
식 (8)에서 이 복합적으로
운동 시 주퇴복좌기에 질량이며 이는
복좌력 Frecoil
가 존재한다 뮬레이션을 수 c 와 스프
recoil
F 과 x 를 는 과정이 변수로, Frecoil (Design study 변수를 동시에 다. 이 값은 참고할 수 있다
차량은 Fig.
여 지면과 이를 강체플 세 방향의 가지며 박격포는 모델은 9자유도를 방향과 회전방향 가정하여 차량 특히 x 축 (pitching), 및 에 대한 감쇠와
3.1 차량의 강체플랫폼의 한 감쇠 계수 량의 고유진동수
Fig. 6 Design study for spring constant
recoil
F =mxɺɺ+cxɺ+kx 주퇴복좌력은 복합적으로 작용한다
주퇴복좌기에 이는 제원에
recoil과 주퇴거리
존재한다. 주퇴속도 통해 계산이 프링상수 k를 x 를 충족시키기 필요하다. 이를
recoil
F 과 x 를 esign study)을 통해 Fig. 6
동시에 만족시키는 값은 실제 주퇴복좌기
있다.
3. 차량
Fig. 7과 같이 부싱(6자유도 강체플랫폼이라고
병진과 세 방향 박격포는 강체플랫폼
자유도를 가진다 회전방향으로
차량 모델의 방향의 롤(r 및 지면과 수직한
쇠와 탄성이 차량의 공회전 진동
플랫폼의 롤과 피칭 계수와 스프링 고유진동수 측정이
Design study for spring constant F =mxɺɺ+cxɺ+kx
주퇴복좌력은 관성력, 작용한다고 가정하였다
연결되어 움직이는 의해 결정되어 주퇴거리 x 또한 주퇴속도 xɺ와 주퇴가속도
이 가능하다.
k를 미지수로
충족시키기는 알맞은 이를 위하여
출력변수로 Fig. 6과 같이 만족시키는 적절한
주퇴복좌기의 특성
차량 모델링
같이 강체(rigid body) 자유도 힘요소)(8) 랫폼이라고 가정하였다
방향의 회전으로 플랫폼 상에 가진다. 부싱에는
감쇠와 탄성이 특성이 반영되도록 (roll) 및 z 축 수직한 y 축 병진방향 탄성이 중요한 요소로
진동 측정 피칭 및 y 축 스프링 상수를 결정하기
측정이 필요하다.
Design study for spring constant
(8 , 감쇠력, 탄성력 가정하였다. m 은 주퇴 움직이는 부위의 결정되어 있다. 주퇴 목표하는 범위 주퇴가속도 xɺɺ는
. 따라서 감쇠계
로 두고 목표하는 알맞은 c, k 값을
c, k값을 입력 두고 설계분석 같이 목표하는 출력 값이 선정되었 특성 값 선정
igid body)로 가정하
(8)로 연결하였고 다. 강체플랫폼은 회전으로 6자유도를 거치되어 전체 는 각각의 병진 탄성이 작용한다 반영되도록 하였다
축 방향의 피칭 병진방향(vertical) 요소로 고려되었다
축 병진방향에 결정하기 위해
이를 추정하기
Design study for spring constant & recoil force 8) 탄성력
주퇴 부위의 주퇴 범위 ɺɺ는 시 감쇠계 목표하는 값을 찾 입력 설계분석 출력 선정되었 선정 시
가정하 하였고 플랫폼은 자유도를 전체 병진 작용한다고 하였다.
피칭 ertical) 되었다.
방향에 대 위해 차 추정하기
recoil force
위하여 상태의 가속도 도 차량의 가속도 2와 였다 터를
Fig
Y(deg.)Y(deg.)
위하여 차량 엔진 상태의 가속도를 가속도 센서의
방향은 지면과 차량의 각변위는 가속도의 차를
와 센서4를 이용하여 였다. y축 방향의 터를 이용하여 구
Fig. 7 S
Fig. 8 Vibration experimental setting at idle condition
Fig. 9 FFT analysis of
0 5 10
0 0.5
1x 10-3
Y(deg.)
0 5 10
0 0.5
1x 10-4
Y(deg.)
0 5 10
0 2 4x 10-3
Y(mm)
엔진에 의한 공회전 가속도를 측정하였다
위치를 나타내는데 지면과 수직한 y
는 센서 1 과 계산하여 구하였다 이용하여 피칭에 방향의 병진변위는
구하였다.
Schematics of the rigid platform
Vibration experimental setting at idle condition
FFT analysis of
10 15 20
Rolling angle
Freq.(Hz)
10 15 20
Pitc hing angle
Freq.(Hz)
10 15 20
Vertic al dis plac em ent
Freq.(Hz)
공회전 진동(I 측정하였다. Fig. 8은 차량
나타내는데, 각
y 축 방향이다
센서 3 사이 구하였다. 마찬가지로 피칭에 의한 각변위를 병진변위는센서 2의
of the rigid platform
Vibration experimental setting at idle condition
FFT analysis of the idle vibrations
25 30 35
Rolling angle
Freq.(Hz)
25 30 35
Pitc hing angle
Freq.(Hz)
25 30 35
Vertic al dis plac em ent
Freq.(Hz)
Idle vibration) 차량에장착된
센서의 가속 방향이다. 롤에 의한 사이에서 측정된 마찬가지로 센서 각변위를 구하 가속도데이
of the rigid platform
Vibration experimental setting at idle condition
idle vibrations
40 45
40 45
40 45
dle vibration) 장착된
가속 한 측정된 센서 하 데이
Fig. 9 에는 피치, 및 y 변위를 주파수 고유주파수는 진의 공회전
3.2 강체플랫폼의 롤과 피칭
3.1절에서
여 역으로 추정
여기서,
ωn =
fd
강체플랫폼은 였으며, 일반적인
ζ로 설정하였다 같이 구하였다
여기서,
= = =
ζ
,
ct c는 임계
y 축 병진방향에 쇠상수cvert는
k
계산된 스프링상수와 의 부싱에 적용되었다
3.3 엔진 공회전 진동 의 거동에 멘트로 동역학 Fig. 10 과 같이 가정하였다. 로 표현한 식이다
에는 각변위와
y 축 방향에 대한
주파수 영역에
고유주파수는 약 15Hz, 5Hz, 10Hz 공회전 진동 주파수
플랫폼의 감쇠 피칭에 작용하는
구한 고유주파수 추정 가능하다
(2 )
1
d t
f J k = × ×
− π
ζ
0
kt
= J ,
d n
ω = −ζ ω
1 1
d 2
f ζ
= π× − × 플랫폼은 부족감쇠
일반적인 차량의 설정하였다. 비틀림 구하였다.(9)
t 2 t
c = ×ζ k J
, 2 0
t t t
t c n
c c c
c J
= = =
ω
비틀림 감쇠상수이다 병진방향에 작용하는
는 다음과 같다
(2 )
1
d vert
f m
k × ×
= −
π ζ
vert 2 vert
c = ×ζ k m
스프링상수와 감쇠상수 적용되었다.
공회전 진동 진동은 시스템의
영향을 미칠 동역학 모델에
같이 롤과 피칭에 . 식 (11)은 식이다.
다물체 각변위와 병진변위를
대한 차량의 에서 보여주고 15Hz, 5Hz, 10Hz로
주파수는 약 40Hz
감쇠 및 탄성
작용하는 비틀림 스프링상수 고유주파수 fd를
가능하다.
2 0 2
(2 )
1 fd J
× ×
−ζ
1 2
d n
ω = −ζ ω
2 0
1 kt ζ J
= × − ×
감쇠 비틀림진동계라고 차량의 감쇠비인 비틀림 감쇠상수
2 0
t t
c k J
2 0
t t t
t c n t
c c c
= = = k J
감쇠상수이다.
작용하는 스프링상수 같다.
2 2
(2 ) 1
fd m
× ×
−ζ
vert 2 vert
c k m
감쇠상수는 강체 .
진동
시스템의 자세를 미칠 수 있으므로
적용하였다 피칭에 주요하게 공회전 진동을
동역학 해석 병진변위를 FFT 하여
차량의 각변위와 병진 보여주고 있다. 각각의
로 나타났다 40Hz 로 나타났다
스프링상수 k 식 (9)에 대입하
(9
비틀림진동계라고 가정하 감쇠비인 0.7을 감쇠비
ct는 식 (10
(10
스프링상수 kvert
강체플랫폼 모델
변화시켜 포탄 있으므로, 이를 가진모 적용하였다. 가진모멘트는 주요하게 작용한다고 진동을 가진모멘트
해석을 통한 포의 하여 롤,
병진 각의 나타났다. 엔
나타났다.
kt 는 대입하
9)
가정하 감쇠비
10)과
10)
vert , 감
모델
포탄 가진모 모멘트는 작용한다고 가진모멘트
Fig.
Rolling Pitching 여기서 델의 다.
석을 생하는 다.
미지수를 F 변위를 프이다 하므 타나 과시 폭의 주파수에 로써 하게
포의 사격정확도
Fig. 10 Moment according to idle vibrations
(a) Idle vibration of roll direction
(b) Idle vibration of pitch direction
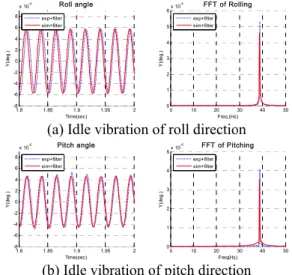
. 11 Comparison of experimental and simulation vibrations
Rolling moment : Pitching moment 여기서 a1과 a
의 가진모멘트가 . 이를 위해 을 반복 수행하여 생하는 롤 및 피칭
. 실험과 동역학 미지수를 추정할
Fig. 11은 실험 변위를 시간영역과 프이다. 각변위는 하므로 가진주파수 타나도록 대역
과시켰다. 시간영역에서 의 크기는 일치 주파수에서 가진진동이 로써 공회전 진동이 하게 적용됨을
1.8 1.85 1.9
-8 -6 -4 -2 0 2 4 6 8
x 10-4 Roll angle
Time(sec)
Y(deg.)
exp+filter sim+filter
1.8 1.85 1.9
-8 -6 -4 -2 0 2 4 6 8
x 10-5 Pitch angle
Time(sec)
Y(deg.)
exp+filter sim+filter
사격정확도 분석
Moment according to idle vibrations
) Idle vibration of roll direction
(b) Idle vibration of pitch direction
omparison of experimental and simulation vibrations
: a1×sin(2π× f ×time) moment : a2×sin(2π× f ×time)
a2는 미지수이며 가진모멘트가 같은 크기가
a1과 a2 값을 수행하여 가진모멘트에
피칭 방향에 동역학 모델의 할 수 있다.
실험과 모델의 시간영역과 주파수
변위는 고차모드의 가진주파수 영역대
통과 필터(B 시간영역에서 실험과
일치한다. 또한 가진진동이 발생함을
진동이 동역학 확인하였다.
1.9 1.95 2
Roll angle
Time(sec)
1.9 1.95 2
Pitch angle
Time(sec)
Moment according to idle vibrations
) Idle vibration of roll direction
(b) Idle vibration of pitch direction
omparison of experimental and simulation
sin(2 roll ) a × π× f ×time
sin(2 pitch )
a × π× f ×time
미지수이며 실험과 크기가 되도록
값을 변화시키면서 가진모멘트에 의해 방향에 대한 각변위를
각변위를 비교함으로써 의 가진모멘트에
주파수 영역에서 비교한 고차모드의 노이즈(noise)
대인 39~41Hz Band Pass Filter) 실험과 모델의 또한 주파수영역에서
발생함을 알 수 동역학 모델에 실험값과
.
0 10 20 30
0 1 2 3 4 5
6x 10-4 FFT of Rolling
Freq.(Hz)
Y(deg.)
exp+filter sim+filter
0 10 20 30
0 1 2 3 4
5x 10-5 FFT of Pitching
Freq(Hz)
Y(deg.)
exp+filter sim+filter
233
Moment according to idle vibrations
) Idle vibration of roll direction
(b) Idle vibration of pitch direction
omparison of experimental and simulation
sin(2 )
sin(2 )
a f time (11) 과 동역학 모 되도록 하여야 한 시키면서, 동해 의해 차량에 발 각변위를 구하였 비교함으로써 가진모멘트에 의한 각 비교한 그래 (noise)가 존재 39~41Hz 영역만 나 ilter)(10)를 통 모델의 주기와 진 주파수영역에서 같은 수 있다. 이 실험값과 동일
30 40 50
FFT of Rolling
Freq.(Hz)
30 40 50
FFT of Pitching
Freq(Hz)
233
omparison of experimental and simulation
모 한 동해 발 구하였 비교함으로써
각 그래 존재 나 통 진 같은
이 동일
4. 강외탄도학
포탄이 포구를 떠나 대기 중을 비행하여 목표지 점에 도달하기까지의 과정을 강외탄도학 이라고 한다. 강외탄도학에서 포탄의 사거리 계산은 포탄 이 받는 공기역학적 힘이 고려되어야 하며 탄도방 정식을 통해 구할 수 있다. 탄도방정식에는 크게 질점해석법(point mass analysis method)과 강체해석 법(rigid body analysis method)이 있다.(11) 포탄을 하 나의 질점으로 보는 질점해석법은 계산이 간단하 지만 계산이 단순화 되어 실제 탄도와는 오차가 존재한다.
본 연구에서는 포탄을 강체로 가정한 강체해석 법을 사용하였고 포탄에는 항력(drag force), 전복 모멘트(over-turning moment), 코리올리력(Coriolis force)만 작용한다고 가정하고 방정식을 작성하였 다.(12) 탄도방정식을 세우고 결과값을 분석하기에 는 코드를 작성하는 것이 용이하다. 이에 따라 Matlab 으로 강외탄도 궤적을 시뮬레이션 하였다.
5. 사격 정확도
5.1 사격오차와 사격정확도
포탄의 탄착점은 사격 시 존재하는 오차에 의해 분산된다. 따라서 사격정확도는 박격포의 성능을 평가하는데 중요한 요소이며 시뮬레이션을 통한 사격정확도 예측은 실제 모델 개발에 도움이 된다.
야전에서 사격정확도는 주로 분산도 오차인 PE 와 CEP 로 평가한다. PE 는 공산오차(probability error) 를 말하며, 단일 측정값을 목표값으로부터 산포를 그렸을 때 50% 범위내인 오차를 말한다. CEP 란 원형공산오차(circular error probability)를 말하며, 미 사일이나 포탄의 명중 정도를 나타내는 용어로써 사용된다. 무기체계에서는 목표점을 향해 발사했 을 때 탄착점이 목표점 중심으로 50%가 포함되는 오차반경을 의미한다. 격발 시 일정 오차 PE 에 대하여 종방향과 횡방향의 PE, 탄착점의 CEP 를 사격정확도의 판단 기준으로 설정하였다.(13)
5.2 지향오차의 영향
포구 순간에는 지향오차가 존재하며 고각과 방 위각의 오차를 지향오차로 고려하였다. 오차가 존 재하는 고각과 방위각은 식 (12)와 같이 입력 값
xin으로 나타낼 수 있다.
xin= +µ ξσ (12) 이 때 µ 은 평균값,
σ
는 공산오차를 나타낸다.따라서 입력 값은 제한된
σ
만큼의 확률분포를 가지고 있으며 ξ 에 정규분포를 따르는 난수 (random number)를 반복적으로 발생시켜야 한다.식 (12)는 박격포 모델의 조인트에 모션으로 입력 되어 고각과 방위각에 오차를 적용하였다.
5.3 공회전 진동의 영향
공회전 진동의 영향을 알아보기 위해서는 포구 순간에 차량 모델에 적용된 가진모멘트에 오차를 발생시켜야 하는데, 이를 위해 식 (11)을 식 (13) 과 같이 수정하여 사용하였다.
Rolling : a1×sin(2π×froll×time+2π ξ× )
Pitching : a2×sin(2π×fpitch×time+2π ξ× ) (13) 식 (13)에 임의의 위상 값이 더해짐으로써 공회전 진동에 의한 오차를 발생시킬 수 있다. 이 때 난 수 ξ는 0 과 1 사이에서 등분포(uniform distribution) 를 이루게 하였다.
6. 시뮬레이션 및 결과
6.1 시뮬레이션 프로세스
강내탄도는 3 장과 4 장의 자주박격포 모델로 시 뮬레이션 할 수 있다. 이로써 포탄의 포구순간의 자세와 위치, 속도, 가속도의 결과 값을 획득 할 수 있다. 이 값을 강외탄도의 탄도방정식에 초기 치로 입력하면 탄도방정식에 의해 포탄의 탄착점 을 구할 수 있다. 사격정확도를 구하기 위해선 오 차가 고려되어야 한다. 이는 몬테카를로 기법(14)에 의해 수행되었다. 몬테카를로 기법은 난수를 발생 시켜 시뮬레이션을 반복하는 것으로써 식 (12)과 식 (13)의 난수 ξ의 생성에 적용되었다.
6.2 시뮬레이션 결과
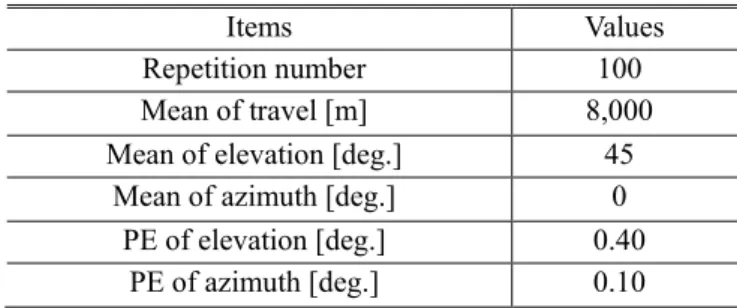
시뮬레이션을 통해 지향오차, 차량의 동특성, 공 회전 진동이 사격정확도에 미치는 영향을 분석할 수 있다. 시뮬레이션 조건은 Table 1 과 같다. 시뮬
Table 1 Simulation conditions
Items Values
Repetition number 100 Mean of travel [m] 8,000 Mean of elevation [deg.] 45
Mean of azimuth [deg.] 0 PE of elevation [deg.] 0.40
PE of azimuth [deg.] 0.10
다물체 동역학 해석을 통한 포의 사격정확도 분석 235
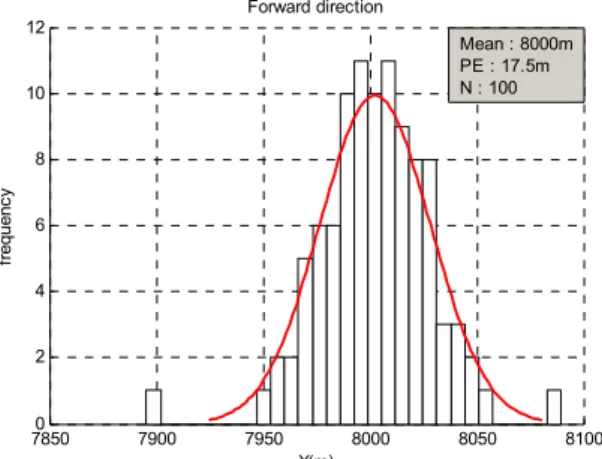
Fig. 12 Distribution of forward direction
Fig. 13 Distribution of lateral direction
Fig. 14 Impact area and CEP of simulations 레이션은 지면거치, 강체플랫폼 거치, 강체플랫폼 거치 후 공회전 진동 가진에 대해 각각 수행되었 다. 지향오차가 사격정확도에 끼치는 영향을 알기 위하여 지면거치 시뮬레이션의 사격정확도를 Fig.
12~14 에 나타내었다. Fig. 12~13 은 포탄의 진행방 향과 횡방향에 대한 탄착점의 분산도를 나타낸다.
진행방향의 PE 는 17.52m, 횡방향의 PE 는 10.32m
Table 2 Simulation results
Case Forward PE Lateral PE CEP Ground fixed 17.52 m 10.32 m 23.99 m Rigid platform 17.54 m 10.32 m 24.00 m
Rigid platform with
Idle vibration 17.54 m 10.30 m 23.99 m
로 나타났다. Fig. 14 는 진행방향을 x 축, 횡방향을 y 축으로 하였을 때 탄착점의 분산을 나타낸다. 탄 착점의 CEP 는 24m 로 나타났다. Table 2 에 세 가 지 시뮬레이션에 대한 진행방향과 횡방향의 PE 와 탄착점의 CEP 를 정리하였다.
차량의 동특성이 사격정확도에 미치는 영향을 알기 위해 지면거치와 강체플랫폼 거치 결과를 비 교하였다. 차량의 동특성에 의해 진행방향으로 0.11%, 횡방향으로 0%, CEP 는 0.04%의 차이가 발생하였다. 공회전 진동은 진행방향으로 0%, 횡 방향으로 0.19%, CEP 는 0.04%의 차이를 발생시켰 다. 시뮬레이션 비교 결과 차량의 동특성과 공회 전 진동은 사격정확도에 미치는 영향이 미미한 것 으로 나타났다. 이는 포탄이 발사되어 포열을 벗 어나는 순간까지의 시간이 매우 짧아 포구 순간까 지의 차량의 자세 변화가 미소하기 때문이다. 또 한 공회전 진동에 의해 박격포에 전달되는 힘이 작아 포의 자세에 미치는 영향이 작기 때문이다.
7. 결 론
본 연구에서는 자주박격포 시스템의 동역학 모 델을 제안하고 시뮬레이션을 통해 자주박격포의 사격정확도를 제시하였다. 자주박격포 모델에는 시스템의 동특성이 반영되었고 해석 결과를 분석 하여 실제 모델 개발 중 필요한 제원을 제시하였 다. 또한 강내탄도에서 강외탄도까지 일원화된 해 석으로 포탄의 탄착점을 계산할 수 있도록 하였다.
반복적인 시뮬레이션 과정에서 난수를 발생시키기 위하여 몬테카를로 기법을 활용하였고, 이를 통해 사격오차에 의한 탄착점의 분산도를 구하여 사격 정확도를 예측하였다. 시뮬레이션을 통해 얻어진 결과는 다음과 같다.
(1) 주어진 차량 제원을 바탕으로 지향오차, 차 량의 동특성, 공회전 진동이 사격정확도에 미치는 영향을 분석한 바, 포탄의 진행방향의 공산오차 (PE, probability error)는 17.52m, 횡방향의 PE 는 10.32m, 탄착점의 원형공산오차(CEP, circular error probability)는 24m 로 나타났다. 이 결과를 바탕으 로 초기 설계치를 검증하면 될 것으로 보인다.
78500 7900 7950 8000 8050 8100
2 4 6 8 10 12
Forward direction
X(m)
frequency
Mean : 8000m PE : 17.5m N : 100
-80 -60 -40 -20 0 20 40 60
0 2 4 6 8 10 12
Lateral direction
Y(m)
frequency
Mean : -13.4m PE : 10.3m N : 100
7900 7920 7940 7960 7980 8000 8020 8040 8060 8080 -80
-60 -40 -20 0 20 40 60
X(m)
Y(m)
CEP=24m Impact area
(2) 차량의 제원을 바탕으로 차량의 동특성이 사 격정확도에 미치는 영향을 분석한 결과, 차량의 동 특성에 의해 진행방향으로 0.11%, 횡방향으로 0%, CEP 는 0.04%의 차이가 발생함이 확인되었다.
(3) 엔진의 공회전 진동은 진행방향으로 0%, 횡 방향으로 0.19%, CEP 는 0.04%의 차이를 발생시키 므로, 공회전 진동은 사격정확도에 미치는 영향이 미미한 것으로 나타났다. 이는 차량의 동특성과 공회전 진동이 박격포의 자세에 변화를 주기 전 이미 포탄이 포열을 탈출하였기 때문이다. 또한 이들이 발생시키는 오차가 다른 요인들에 비해 훨 씬 작기 때문이다.
(4) 이들 결과를 볼 때, 본 차량에 박격포가 차 량에 탑재되더라도 차량의 동특성과 엔진의 진동 은 사격정확도에 별다른 영향을 미치지 않을 것으 로 예상된다.
참고문헌
(References)
(1) Kim, S., Kim, K. H. and Kim, S. Y., 2009, “A Concept Study on Efficient Domestic Development of 120mm Self-propelled Mortar System,” Journal of the Korea Institute of Military Science and Technology, Vol. 12, No. 2, pp. 133~138.
(2) Sung, H. G., Jang, J. S., Yoo, S. Y. and Roh, T. S., 2011, “Development of Numerical Code for Interior Ballistics and Analysis of Two-phase Flow according to Drag Models,” Journal of the Korean Society of Propulsion Engineers, Vol. 15, No. 6, pp. 38~46.
(3) Lee, S. K. and Lee, G. Y., 2007, “A Study on the Pressure-travel Curve of 5.56mm Rifle Obtained from the Empirical Base Pressure Factor,” Journal of the
Korea Institute of Military Science and Technology, Vol. 10, No. 3, pp. 208~216.
(4) FunctionBay, 2013, “RecurDyn v8.2 Help”
(5) Lee, B. H. and Yoo, W. S., 1993, “Dynamic Analysis of a Launcher under Impulsive Forces,” Transactions of KSAE, Vol. 15, No. 2, pp. 84~91.
(6) Carl De Boor., 1978, A Practical Guide to Splines, Springer
(7) Donald E. Carlucci. and Sidney S. Jacobson., 2007, Ballistics, Theory and Design of Guns and Ammunit- ion, Taylor & Francis Group.
(8) Choi, Y. C., Kim, K. S., Kim, O. J. and Yoo, W. S., 1998, “Development of CAE Tools for Vehicle Suspension Design (I) - Development of a Bushing Module,” Transactions of KSAE, Vol.6, No.6, pp.31- 39.
(9) Singiresu S. Rao., 2011, Mechanical Vibrations, Pearson Education, Inc.
(10) Math Works, Inc., 2015, “Signal Processing Toolbox User's Guide”
(11) Lee, H. J., 1996, Rifle and Ballistics, Chung Moon Gak.
(12) Robert L. McCoy., 2012, Modern Exterior Ballistics, The Launch and Flight Dynamics of Symmetric Projectiles, Schiffer Publishing Ltd.
(13) Trohanowsky, Raymond., 2005, “120 mm Mortar System Accuracy Analysis,” International Infantry &
Joint Services Small Arms System Annual Symposium, Exhibition & Firing Demonstration.
(14) Chae, A. K., Bae, D. S. and Jeon, H. S., 2008, “A Development of Numerical Analysis Software on Dynamic Analysis for Lunching System,” Journal of the Korea Institute of Military Science and Technology, Vol. 32, No. 12, pp. 1146~1152.