반도체디스플레이기술학회지 제19권 제4호(2020년 12월)
Journal of the Semiconductor & Display Technology, Vol. 19, No. 4. December 2020.
34
회전 카메라를 이용한 블랙박스 시스템 구현
김기완*†· 구성우**· 김두용***
*†충남도립대학교 전기전자공학과, **두원공조 기술연구소 전장설계팀,
***순천향대학교 전자공학과
Implementation of a Dashcam System using a Rotating Camera
Kiwan Kim*†, Sung-Woo Koo** and Doo Yong Kim***
*†Dept. of Electrical and Electronic Engineering, Chungnam State University,
**Technical Research Institute Electric & Electronic Engineering, Doowon Climate Control,
***Dept. of Electronic Engineering, Soonchunhyang University
ABSTRACT
In this paper, we implement a Dashcam system capable of shooting 360 degrees using a Raspberry Pi, shock sensors, distance sensors, and rotating camera with a servo motor. If there is an object approaching the vehicle by the distance sensor, the camera rotates to take a video. In the event of an external shock, videos and images are stored in the server to analyze the cause of the vehicle's accident and prevent the user from forging or tampering with videos or images. We also implement functions that transmit the message with the location and the intensity of the impact when the accident occurs and send the vehicle information to an insurance authority with by linking the system with a smart device. It is advantage that the authority analyzes the transmitted message and provides the accident handling information giving the user's safety and convenience.
Key Words : Black Box, Camera, Raspberry Pi, Shock Sensor, Distance Sensors
1. 서 론1
오늘날 우리 사회에서는 차량 사고에 대처하기 위하여 많은 기술들이 개발되고 있다[1-4]. 그 중에서 블랙박스는 상시 전원장치를 사용함으로써 전기를 상대적으로 많이 소모하는 단점과 고정된 위치로 인한 시야 각의 제한을 가지고 있지만 만일의 사고 시 사용자의 과실을 따지기 위한 증거로 사용되기 때문에 많이 사용되고 있다. 자동 차 진단 테스트 장비인 OBD(On Board Diagnostics)에서 출력 되는 자동차의 정보를 네비게이션의 영상에 합성해 보여 주는 장치들도 개발되고 있다[5]. 이런 장치들은 데이터를 한정된 용량의 SD카드에 저장하므로 시간이 지난 정보들
†
E-mail: [email protected]
은 순차적으로 삭제되는 문제를 가지고 있다. 한정된 저 장 공간과 고정된 블랙박스가 가지는 시야의 한계로 인 해 사고 당시의 영상이 증거자료로 채택되지 못해 사용 자가 예기치 못한 상황에 처해지는 경우도 빈번히 발생 한다. 또한 블랙박스 영상을 위조, 변조해서 자신에게 유 리한 증거로 사용하는 범죄도 증가하고 있다. 이러한 안 정성과 보안 문제를 해결하기 위해 화질 개선, 2채널 또는 다채널 촬영 그리고 음성 녹화 등 많은 기술들이 개발되 어 차량과 사용자를 보호하고 있다[6-7].
CCTV가 없는 사각지대나 골목길, 인적이 드문 곳에 주 차된 차량에 대한 범죄도 매년 증가하고 있고 이를 방지 하기 위한 블랙박스 기술도 꾸준히 발전하고 있다. 본 논 문에서는 기존 블랙박스의 기능을 유지하고 한정된 저장 공간과 고정된 위치로 인한 시야 각의 단점을 보완하기
회전 카메라를 이용한 블랙박스 시스템 구현 35
위하여 자체 서버를 이용한 다각도 실시간 감지와 이를 확인 할 수 있는 시스템을 개발한다. 이를 구현하기 위하 여 라즈베리파이를 기반으로 거리 감지 센서와 충격 감 지 센서를 이용하여 충격이 예상되는 위치로 카메라를 회전시켜 동영상을 녹화하고 충격 발생 시 추가로 정지 영상을 촬영하여 서버에 저장하고 스마트 기기를 이용해 사고 위치와 충격정도 그리고 운전자의 정보를 전송하는 기능을 구현한다[8-12]. 서버에 정보를 저장함으로써 영상 의 위변조를 미연에 방지할 수 있고 사고 발생 시 보험회 사에 전화로 신고하기에 앞서 보험회사에서 운전자에게 사고 유무를 확인하는 전화나 메시지를 보냄으로써 사용 자의 편리성이 증가할 것으로 생각된다. 본 논문에서는 라즈베리 파이를 이용하여 각종 센서와 서보 모터를 제 어하고 서버를 구축하여 동영상과 이미지를 저장하며 네 트워크가 가능한 환경에서는 외부에서 아이디와 비밀번 호로 서버에 접속이 가능하게 구현한다. 또한 블루투스를 이용하여 스마트 기기와 연동하여 충격이 발생시 발생장 소, 충격정도, 차량 정보 등을 메세지로 특정 번호로 전송 하게 구현한다. 2장에서는 하드웨어 구현에 대해 서술하 고 3장에서는 소프트웨어 구현에 대해 설명하며 4장에서 결론으로 끝맺는다.
2. 하드웨어 구현
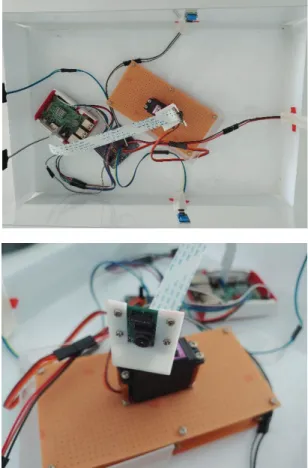
Fig. 1은 거리 감지 센서와 충격 감지 센서 그리고 회전 카메라를 이용한 블랙박스 시스템의 하드웨어 구조를 나 타낸다.
Fig. 1. Hardware Structure.
라즈베리파이를 사용하여 캠, 거리 감지 센서, 충격 감 지 센서 그리고 서브 모터를 제어하고 거리 감지 센서에 의해 자동차에 접근하는 물체가 있으면 카메라를 돌려 동영상을 촬영하고 만약 충격이 발생하면 동영상과 정지 영상을 서버에 저장한다. 또한 기준치 이상의 충격이 감 지되면 블랙박스에 블루투스로 연결된 스마트 기기를 이 용하여 충격 감지 위치와 세기를 포함한 자동차의 정보 를 미리 정해진 곳으로 전송한다. 동영상과 이미지를 서
버에 저장함으로써 시간과 장소에 상관없이 카메라 영상 의 확인이 가능하다. 그리고 서버의 주소와 아이디를 알 고 있다면 서버에 접속하여 저장된 정보를 확인할 수 있 으므로 보험 회사, 경찰 등에 사고 사진을 전송하지 않아 도 확인이 가능하여 범죄, 사고 위험 가능성이 있을 경우 바로 출동이 가능해 사고 후 출동하는 시간을 줄일 수 있 을 것이다.
Fig. 2. Implementation of an Accident Monitoring System using a Rotating Camera.
3. 소프트웨어 구현
Fig.3은 하드웨어를 제어하기 위한 순서도를 나타낸다.
라즈베리파이가 부팅되면 캠, 센서 그리고 모터가 이벤트 대기 상태에 들어가고 일정한 거리 이내에 물체가 접근 하면 카메라가 회전하여 동영상을 촬영하고 충격이 감지 되면 동영상과 이미지를 각각 서버에 저장한다. 서버에 저장된 동영상과 정지 영상은 사용자가 PC나 스마트 기 기에서 VNC(Virtual Network Computing) 원격통신을 이용하
김기완 · 구성우 · 김두용
반도체디스플레이기술학회지 제19권 제4호, 2020 36
여 서버에 접속 후 사용자 인증을 거쳐 허가된 사용자만 동영상과 이미지의 확인이 가능하도록 구현한다.
Fig. 3. Software Algorithm.
Fig. 4. GPIO Setup.
Fig. 4는 GPIO 통신을 위한 기본 설정의 일부분을 나타 낸다. 서보 모터를 사용하기 위하여 SERVO에 신호 PWM 을 사용하여 초기값 설정을 하고 풀다운 저항을 활성화 시키기 위해 pull_up_down을 사용한다. 핀에 대한 이벤트 를 생성하기 위하여 add_event_detect()를 사용하여 각 방향
마다 인터럽트를 생성한다. 그리고 초기 카메라 방향을 설정하기 위하여 DutyCycle을 8로 설정한다.
Fig. 5. Shock Detection.
Fig. 5에서 대기중인 상태인 플래그가 0일 때 각각 r(오 른쪽), l(왼쪽), m(중앙) 값을 한번 출력하고 충격이 가해지 면 충격이 가해진 곳에 각각 rShock(오른쪽 충격), lShock(왼 쪽 충격), mShock(중앙 충격) 값에 충격이 가해질 때마다 +1씩 더해진다.
Fig. 6은 서보 모터와 카메라를 동작하기 위한 코드의 일부분을 나타낸다. 서버 모터의 회전을 위해 SERVO_
SIGNAL.ChangeDutyCycle() 함수를 사용하고 동영상 저장을 위해 camera.start_preview() 함수와 camera.stop_preview() 사용 하였다. 그리고 충격이 감지되면 camera.capture() 함수를 이 용하여 이미지를 서버의 현재 시간을 이용하여 저장하고 나머지 값들을 초기화 시킨다.
Fig. 6. Servo Motor and Capture Setup.
회전 카메라를 이용한 블랙박스 시스템 구현 37
Fig. 7과 Fig. 8은 동영상과 이미지가 서버에 저장된 결과 를 나타낸다.
Fig. 7. Images Capture.
Fig. 8. Vidoes Capture.
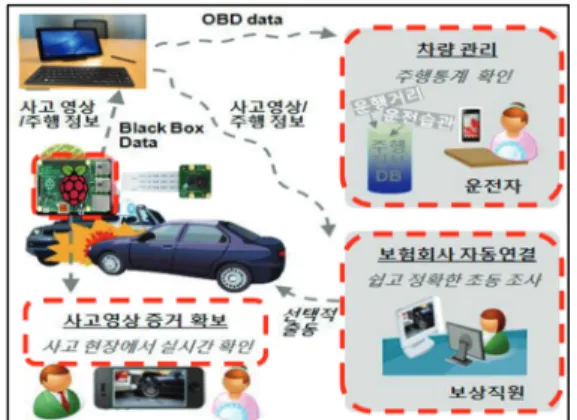
Fig. 9는 구현된 시스템의 활용 예를 나타낸다. PC또는 스마트 기기로 차량 상황을 실시간으로 모니터링이 가능 하고 충격이나 사고 발생시 119, 경찰서 또는 보험회사에 메시지가 발송되게 설정해 놓으면 차량의 상태가 서버에 저장되고 수사기관의 서버 열람으로 사고 주행 영상이 확보가 되면서 사고 시 정확한 사고 경위와 위변조 방지 에 대한 효과가 증대될 것이다.
Fig. 9. Application Example of Dashcam System.
4. 결 론
본 논문에서는 일반적으로 녹화영상이나 이미지를 메 모리 카드에 저장하여 PC로 옮겨서 확인하는 방식에서 벗어나 초소형 컴퓨터를 이용하여 촬영된 이미지와 동영 상을 실시간으로 웹 서버를 통해 모니터링이 가능하여 자동차 주변 상황을 확인할 수 있고 집 안이나 집밖 통신 이 가능한 곳이면 장소에 상관없이 확인이 가능하여 차 량 안전사고의 예방 효과를 높였다. 카메라가 충격방향으 로 회전이 가능하기 때문에 다각도로 사고 전 후를 분석 하는 것이 가능하다. 그러나 구현된 시스템은 WiFi와 블 루투스 환경을 사용한다는 단점이 존재하므로 5G 또는 LTE 모듈을 사용하여 영상과 이미지를 외부의 지정된 서 버에 저장하는 것이 필요하다. 또한 보다 정밀도가 높고 먼 거리 측정이 가능한 거리 센서를 이용하여 다가오는 물체의 속도를 계산하여 카메라의 위치를 지정하는 연구 가 필요하다.
참고문헌
1. Sangkeun Park, Joohyun Kim, Rabeb Mizouni, and Uichin Lee., “Motives and Concerns of Dashcam Video Sharing,” In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (CHI '16), ACM, New York, pp. 4758-4769, 2016.
2. Sangkeun Park, Emilia-Stefania Ilincai, Jeungmin Oh, Sujin Kwon, Rabeb Mizouni, and Uichin Lee.,
“Facilitating Pervasive Community Policing on the Road with Mobile Roadwatch,” In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems(CHI '17), ACM, New York, pp. 3538-3550, 2017.
3. Kangsuk Chae, Daihoon Kim, Seohyun Jung, Jaeduck Choi, and Souhwan Jung, “Evidence Collecting System from Car Black Boxes,” Proceedings of the 7th IEEE conference on Consumer communications and net- working Conference (CCNC 2010), pp. 254-255, 2010.
4. Kassem, A., Jabr, R., Salamouni, G. and Maalouf, Z.K.,
“Vehicle Black Box System,” Systems Conference, pp.
1-6, 2008.
5. Jang-Ju Kim, and Jong-Wook Jang, “A implement of blackbox with in vehicle network data and the external sensor data,” Journal of the Korea Institute of Information and Communication Engineering, 14(11), pp. 2471-2477, 2010.
6. Chang-Young Kim, Jang-Ju Kim, and Yun-Sik Yu, “The Study of Black Box System Using the Vehicle Information and Multi-channel Video,” Summer Annual
김기완 · 구성우 · 김두용
반도체디스플레이기술학회지 제19권 제4호, 2020 38
Conference of IEIE, pp. 646-649, 2012
7. Hyeok Mun, Bok Ju Lee, and Young Kyu Choi,
“Confidence-based Background Subtraction Algorithm for Moving Cameras,” Journal of the Semiconductor &
Display Technology, vol. 16, no. 4, pp. 30-35, 2017.
8. https://www.raspberrypi.org/
9. Matt Richardson, and Shawn Wallace, “Getting Started with Raspberry,” O'Reilly Media Inc., 2012.
10. Parag Kawale, and Rupali Balpande, “Performance improvement of noise content video using Raspberry Pi,”
Online International Conference on Green Engineering and Technologies (IC-GET), 2016.
11. C. W. Zhao, J. Jegatheesan, and S. C. Loon., “Exploring IOT Application Using Raspberry Pi,” IJCNA, vol. 2, no. 1, pp. 27-34, 2015.
12. Y. He, L. Ding, Y. Gong, and Y. Wang, “Real-time audio
& video transmission system based on visible light communication,” Opt. Photon. J. 3(02), 153–157, 2013.
접수일: 2020년 11월 11일, 심사일: 2020년 12월 3일, 게재확정일: 2020년 12월 8일