수동형 합성개구 신호처리에서 수신 배열 센서의 이동 속도에 대한 영향 분석
An analysis of the moving speed effect of the receiver array on the passive synthetic aperture signal processing
김시문,† 변성훈, 오세현
(Sea-Moon Kim,† Sung-Hoon Byun, and Sehyun Oh) 한국해양과학기술원 부설 선박해양플랜트연구소 해양시스템연구부
(Received October 5, 2016; accepted December 18, 2015)
초 록: 최근 고해상도의 해저면 영상을 취득하기 위한 합성개구 신호처리 및 수중 시스템 개발 연구가 여러 국가에서 활발히 진행 중에 있다. 국내에서도 합성개구소나의 필요성 및 중요성을 인식하여 기초적인 관련 연구가 시작되었으 나 수신 배열 센서의 이동 속도에 의한 도플러 효과가 대부분 무시되어 왔다. 본 논문에서는 수신 배열 센서의 이동 속도 에 따른 영향을 확인하기 위하여 공간 주파수 영역 보간법을 이용한 수동형 합성개구 신호처리 결과의 영상 왜곡 및 오차를 분석한다. 센서의 이동을 고려하지 않은 원래의 송신 신호만을 사용하는 경우 센서의 이동 속도가 증가함에 따 라 음원의 위치 추정 오차가 증가하며 영상 왜곡이 현상이 뚜렷하게 나타난다. 센서의 이동을 고려하여 보정된 신호를 사용하는 경우 정확한 위치 추정이 가능하며 영상 왜곡 현상은 나타나지 않는다. 결론적으로 1 m/s 이상의 속도에서는 센서의 이동에 의한 도플러 현상을 보정하기 위한 알고리듬 적용이 필수적이다.
핵심용어: 합성개구 신호처리, 공간 주파수 영역 보간법, 수신배열 이동 속도, 도플러 효과, 음원 위치 추정 오차
ABSTRACT: In order to obtain high-resolution seafloor images, research on SA (Synthetic Aperture) processing and the development of related underwater systems have been performed in many countries. Recently the SA processing is also recognized as an important technique in Korea and researchers started related basic study.
However, most previous studies ignored the Doppler effect by a moving receiver array. In this paper reconstructed SAS (Synthetic Aperture Sonar) images and position errors are analyzed according to the speed of a moving array for understanding its moving effect on the SAS images. In the analysis the spatial frequency domain interpolation algorithm is used. The results show that as the moving speed of the array increases the estimated position error also increases and image distortion gets worse when we do not consider the array motion. However, if the compensated receiver signals considering the array motion are used the position error and image distortion can be eliminated.
In conclusion a signal processing scheme which compensates the Doppler effect is necessary especially in the condition where the array speed is over 1 m/s.
Keywords: Synthetic aperture signal processing, Spatial frequency domain interpolation, Receiver array moving speed, Doppler effect, Estimated source position error
PACS numbers: 43.60.Fg, 43.30.Wi
†Corresponding author: Sea-Moon Kim ([email protected]) KRISO 32 Yuseong-daero 1312beon-gil, Yuseong-gu, Daejeon 34103, Republic of Korea
(Tel: 82-42-866-3840, Fax: 82-42-866-3819)
I. 서 론
수중 해저면 영상을 취득하기 위하여 측면주사소
나(side scan sonar) 또는 다중빔음향측심기(multibeam echo sounder) 등이 널리 사용되어 왔으며 최근에는 합성개구 신호처리 기법[1,2]이 소나에 적용되면서 상 대적으로 정밀한 해저면 영상 획득이 가능한 합성개 구소나SAS(Synthetic Aperture Sonar) 관련 연구가 활
시스템[6,7]뿐만 아니라 동일한 원리로 수동형 시스 템에 대해서도 적용 가능하다.[8,9]국내에서도 최근 들어서 합성개구 신호처리에 대한 연구가 수행 된 바 있으며, 특히 수신되는 음향 신호를 이용하여 보 정하는 연구[10]와 원형 운동을 하는 배열센서를 이용 한 표적 영상 생성 연구가 수행되었다.[11]또한 실제 로 수조와 같이 제어 가능한 환경에서 적용한 예도 있다.[12,13]
합성개구 신호처리는 원래 레이더 시스템에서 고 해상도의 영상을 취득하기 위해 사용되었으나 최근 에는 의료나 해양탐사 등 다양한 분야에 활용되고 있다.[1]합성개구레이더 SAR(Synthetic Aperture Radar) 와 같이 전파를 사용하는 경우 파동의 전파 속도가 센서의 이동 속도에 비해 매우 커서 도플러 효과에 의한 신호 왜곡이 무시할 만큼 작다. 그러나 음속은 상대적으로 전파 속도가 매우 낮으므로 소나 시스템 의 이동에 의한 도플러 효과가 레이더 시스템에 비 해서 크게 나타난다. References [10] 및 [11]과 같은 국 내 연구의 경우 이러한 이동에 의한 영향을 무시하 여 왔으나 근본적으로 센서의 운동이 영상 생성에 어느 정도의 영향을 미치는지 확인하고 영상 해상도 의 저하를 가져다주는 경우 신호처리 알고리듬에 대 한 보완 필요성이 요구된다.
본 논문에서는 선형주파수변조 LFM(Linear Frequency Modulation) 신호를 사용하는 합성개구소나 신호처 리에 있어서 수신 배열 센서의 이동 속도에 따른 합 성개구 영상의 왜곡 정도와 이에 따라 발생되는 오 차를 분석하고자 한다. 이동 배열 센서에 수신되는 신호 모의는 한국해양과학기술원 부설 선박해양플 랜트연구소에서 개발한 소나 채널 모델링 프로그 램[14]을 사용하며 합성개구소나 신호처리 알고리듬 은 공간 주파수 영역 보간법(spatial frequency domain
를 고려한 음장의 적용 유무에 따른 영상 취득 결과 를 비교함으로써 그 영향을 파악하고자 하며, V장에 서 결론을 맺는다.
II. 수신 센서의 운동에 의한 도플러 효과의 영향
소나에서 광대역 신호로 사용되는 선형주파수변 조 신호는 다음과 같이 표현된다.
sin . (1)
, (2)
여기서 및 은 각각 초기 및 종단 주파수를 의미 하며 는 선형주파수변조 신호의 펄스 길이를 나 타낸다. 이때 순간 주파수 는
(3)
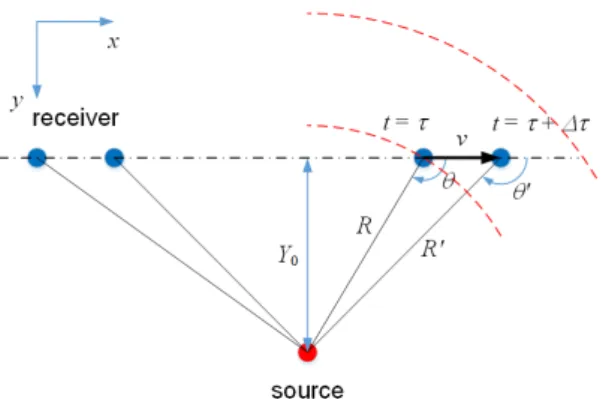
와 같이 선형적으로 변화한다. Fig. 1과 같이 음원이 고정되어 있고 수신기가 일정한 속도 로 이동하는 경우 수신센서에서 측정된 순간 주파수 ′는 도플러 효과에 의해
′ cos (4)
와 같이 표현된다. 여기서 는 매질 내에서의 음속을 나타내며 는 Fig. 1에서 표시된 바와 같이 수신센서
Fig. 1. Configuration of a fixed source and a constantly moving receiver.
Fig. 2. Correlation of transmitting and receiving signals for various moving speed of the receiver [ = 80 kHz,
= 120 kHz, = 1 ms, = 1500 m/s, = 0-5 m/s,
= 5 m, = , Kaiser-Bessel window ( = 2.9)].
의 이동 방향 벡터와 수신센서로부터 음원 방향으로 향하는 벡터 사이에 이루는 각도를 의미한다. 음속 과 펄스 신호 발생 시각으로부터 수신센서에 처음으 로 도달되는 시간 지연 및 전파 거리를 각각 , 이 라 하고 펄스의 마지막 신호가 도달되는 순간까지의 시간 지연 및 전파 거리를 각각 ′, ′이라 하면 수신 되는 신호 길이 ′ 는
sin ′ sin ′, (5)
cos ′ cos′ , (6)
, (7)
′ (8)
의 4개의 방정식을 연립하여 다음과 같은 해를 구할 수 있다.
cos
, (9)
cos cos cos (10)
만약 수신 센서가 고정되어 있는 경우라면
이므로 가 되어 수신 센서에서 송신 신호 펄
스 길이와 동일한 펄스 길이가 측정된다. 그러나 수
신 센서가 이동하는 경우 즉 ≠ 이면 일반적으로
는 와 다른 값을 갖는다. 예를 들어 수신 센서 가 멀리서 음원 위치로 근접하는 경우( )에는
(11)
와 같이 수신 신호의 길이가 감소하며 반대로 음원 으로부터 멀어지는 경우( )에는
(12)
와 같이 신호의 길이가 증가한다. 와 같이 일반적인 경우에 는 Eqs.(11)과 (12)의 사이의 값 을 가진다. 따라서 음원의 위치를 추적하는데 있어 서 수신 센서의 운동을 고려하지 않고 원래의 음원 신호를 이용하여 정합필터를 적용하는 경우에는 시 각 추정의 오차와 필터 부정합에 의한 성능 저하가 발생하게 된다. Fig. 2는 선형주파수변조 신호의 음 원이 존재하는 공간에서 수신 센서가 이동할 때 수 신 센서 신호와 음원 신호와의 상관값의 한 예를 보 여주고 있다. 수신 센서의 이동 속도가 증가할수록 최대 상관값이 감소하며 최대값 위치 오차가 증가하 고 있음을 알 수 있다.
결론적으로 합성개구소나와 같이 이동 배열 센서
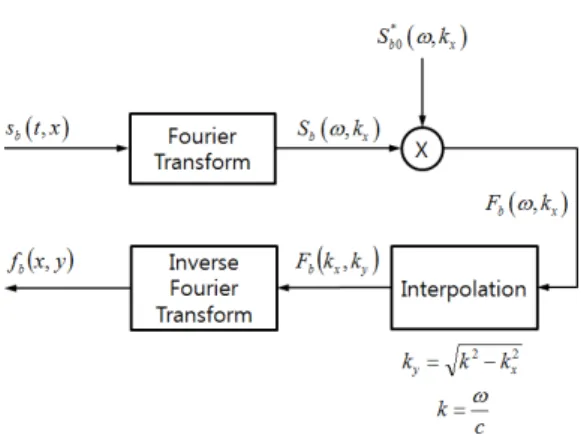
Fig. 3. Block diagram of a passive SAS algorithm via spatial frequency domain interpolation.[1]
합성개구 신호처리를 이용한 영상 생성 방법으 로는 공간 주파수 영역 보간법, 거리 적층(range stacking) 알고리듬, 시간 영역 상관 및 배면(time domain correlation and back projection) 알고리듬 등이 알려져 있다.[1]상기된 거리적층 알고리듬과 시간 영역 상관 및 배면 알고리듬은 주파수 영역에서의 적분 또는 시간영역에서의 상관 신호 추정 과정이 포함되어 있 으며. 본 논문에서는 상대적으로 처리시간 측면에서 유리한 공간 주파수 영역 보간법을 이용한 알고리듬 을 사용하고자 한다. 본 알고리듬의 각 단계별 흐름 도는 Fig. 3에 나타난 바와 같다.[1]
수신 센서가 축과 평행하게 운동할 때 각 위치 에서의 시간에 따른 기저대역 신호 를 얻은 후
를 시간과 공간영역에서 푸리에 변환한 신호
와 기준 위치에서 음원이 존재한다고 가정 하여 얻은 기저대역 푸리에 변환 신호 를 곱 하면 주파수 영역 와 축 방향의 파수 영역 에서 의 상관함수 를 얻는다. 주파수와 파수와의 관계식
영역으로 변환할 때 사용되는 보간법은 영역 에서 격자의 위치에 해당되는 값을 영역에서 구하고 그 주변의 알고 있는 위치에서의 값을 이용 하여 보간법을 적용함으로써 구할 수 있다.[1]
능동 합성개구 소나에서는 송신 센서와 수신센서 간의 왕복 경로를 고려해야 하므로 시간이 두 배가 걸리며 대신에 의 값을 대입하고 동일한 과정을 거쳐서 능동 합성개구 영상을 얻을 수 있다. 위 신호 처리의 기본적인 개념은 일반적인 시계열 신호
와 시간지연이 존재하는 신호 의 상관함수
의 최대값으로부터 시간지연 또는 공간상의 거리 를 추정하는 원리와 동일하다고 생각할 수 있다.
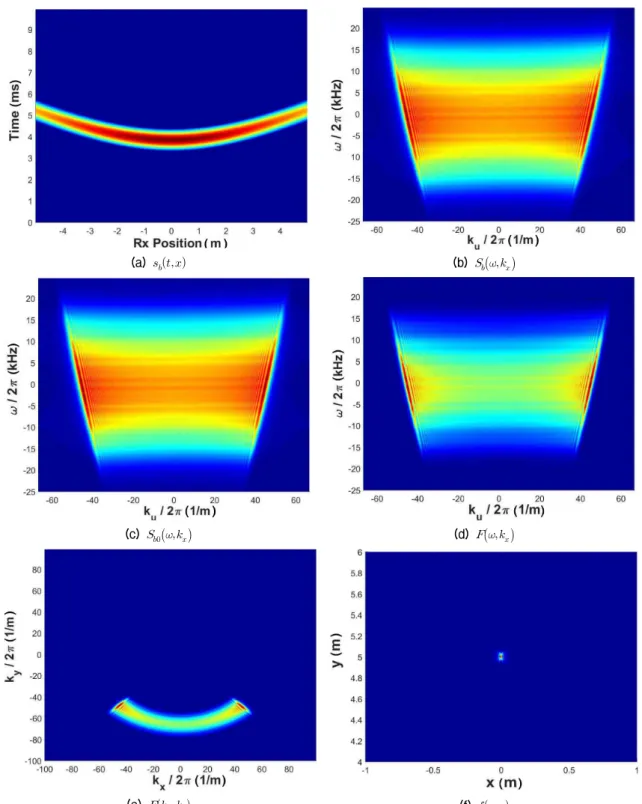
Fig. 4는 Fig. 3의 합성개구 신호처리 알고리듬 이 용하여 얻은 각 단계에서의 변수값을 도시한 그림의 예이다. Fig. 4(a)는 각 수신센서 위치에서 수신된 기 저신호인 를 나타낸 것으로 음원에 가장 근접 해 있을 때 시간지연이 가장 작고 음원에서 멀어질 수록 시간지연이 커져서 U자 형태의 곡선으로 표현 된다. Fig. 4(b)와 (a)는 시간 및 공간영역에서 푸리에 변환하여 얻은 값 로서 축 방향으로는 신 호의 대역폭 크기에 해당하는 만큼의 분포를 가지 며, Eq.(13)의 관계식으로부터 의 제곱값이 양수인 조건을 고려하면 축 방향으로는 ± 의 영역 안 에 존재하는 것을 알 수 있다. 본 예제는 음원의 위치 와 기준 위치를 동일하게 설정한 것으로 Fig. 4(c)는 (b)와 동일한 영상을 얻는다. Fig. 4(d)는 (b)와 (c)의 곱 으로서 색상 대비가 증가하는 것을 관찰할 수 있으 며 Fig. 4(e)는 선형보간법을 이용하여 공간주파수에 서 나타낸 그림이다. 축 방향으로는 Fig. 4(c)와 같
이 ± 의 영역 안에 존재하며 음파가 음의 축 방
향으로 전파하므로 값은 음의 값만 존재한다. 이
(a) (b)
(c) (d)
(e) (f)
Fig. 4. Example of SAS processing results via spatial frequency domain interpolation [= 80 kHz, = 120 kHz,
= 1 ms, = 1500 m/s, = 5 m/s, = (5,0) m, Kaiser-Bessel window ( = 2.9)].
때 은 과 같으므로 원호를 중심으로 대 역폭 만큼의 폭을 갖는다. 이를 다시 역푸리에 변환 하면 Fig. 4(f)와 같이 공간 영역에서의 최종 합성개
구소나 영상을 얻을 수 있다. Fig. 4(f)의 영상에서 알 수 있듯이 음원이 존재하는 위치에서 최대값을 갖 는다.
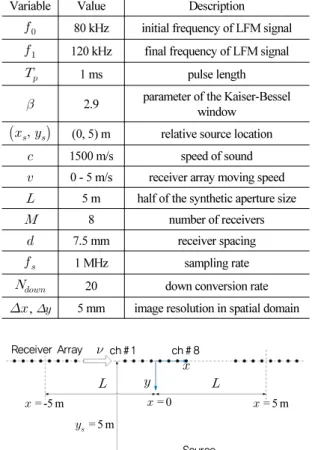
Table 1. Simulation parameters.
Variable Value Description
80 kHz initial frequency of LFM signal
120 kHz final frequency of LFM signal
1 ms pulse length
2.9 parameter of the Kaiser-Bessel window
(0, 5) m relative source location
1500 m/s speed of sound
0 - 5 m/s receiver array moving speed
5 m half of the synthetic aperture size
8 number of receivers
7.5 mm receiver spacing
1 MHz sampling rate
20 down conversion rate
, 5 mm image resolution in spatial domain Receiver Array ch#1 ch#8
= -5 m
= 5 m
= 5 m
= 0
Source
Fig. 5. Simulation configuration with a fixed source and a moving receiver array.
용하였으며 다른 변수에 의한 영향을 배제하기 위하 여 무지향성 송수신 센서, 반사파가 존재하지 않는 공간, 일정한 음속 분포 등 이상적인 환경을 가정하 였다. 이동 속도는 자율무인잠수정 또는 예인체 탑 재를 가정하여 최대 5 m/s까지 해석하였으며 100 kHz 의 중심주파수에 40 kHz의 대역폭 신호를 사용하였 다. 배열 센서는 100 kHz에서 반파장 간격으로 구성 되어 있는 경우를 가정하였으며 최대 5 m/s까지의 이
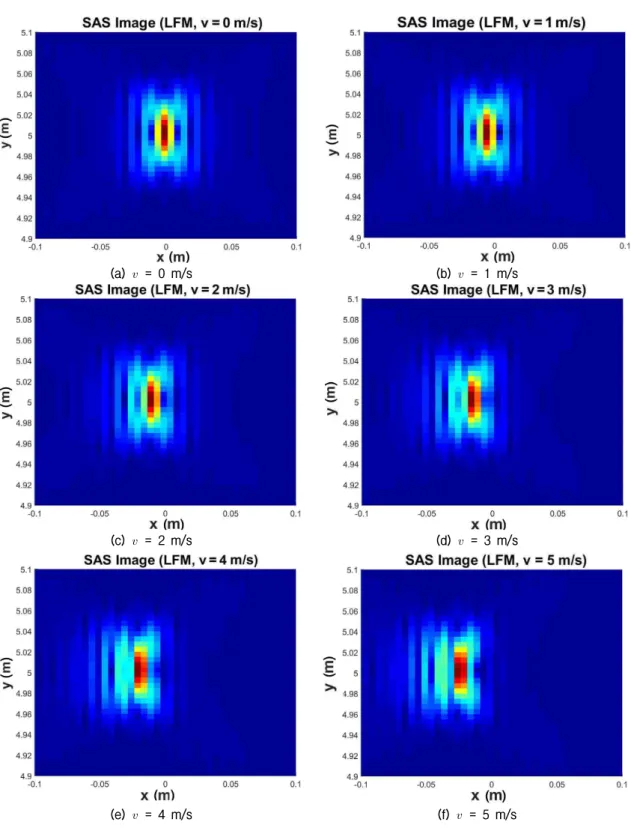
모두 음원의 위치를 정확히 추정하고 있지 못한 것 을 알 수 있다. 이는 수신 배열 센서가 음원에 근접하 는 경우에는 수신된 주파수가 도플러 효과에 의해 증가하여 음원 신호와의 상관함수를 고려할 때 거리 가 실제보다 가깝게 느껴지며 배열 센서가 음원으로 부터 멀어지는 경우에는 반대로 주파수가 감소하여 실제 거리보다 멀게 느껴지기 때문이다. 따라서 음 원위 위치는 실제 위치보다 음의 축 방향으로 이동 하여 존재하는 것으로 예측된다. 또한 음원이 무지 향성으로 음원영상이 대칭적인 특성을 지녀야 하나 Fig. 6의 영상은 대칭적인 특성도 만족하지 못한다.
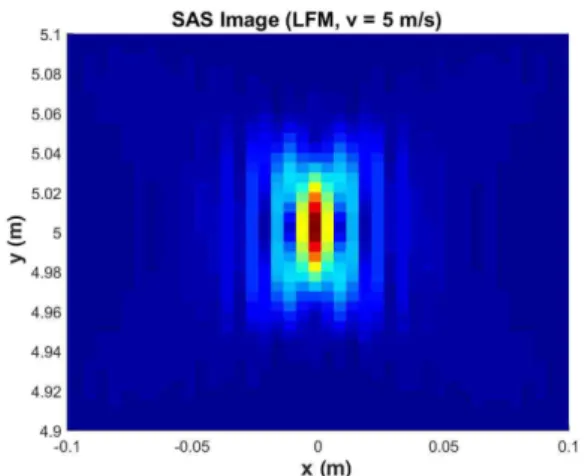
Fig. 7은 배열 이동 속도에 따른 오차 그래프를 나타 낸다. 속도에 비례하여 오차가 증가하는 경향을 나 타내고 있음을 알 수 있다. 그림에 표시된 오차 범위 는 영상의 해상도가 5 mm인 경우를 반영하여 ±2.5 mm를 적용하였다. Fig. 8은 = 5 m/s일 때 배열센서의 이동에 의한 도플러를 고려하여 음원 모델링[14]을 하 는 경우의 결과를 나타내며 이 경우 정확한 위치 추 정이 가능한 것을 알 수 있다. 다른 속도에서도 이동 을 고려하려 개발된 소나 채널 모델[14]을 적용한 결 과 Fig. 8과 동일한 영상이 취득 되었으며 이는 정확 한 위치 추정이 가능함을 의미한다.
V. 결 론
선형 운동을 하는 수신 배열 센서를 이용하여 고 정되어 있는 음원의 위치를 추정하는 수치해석을 수 행하였다. 송수신 센서의 운동을 고려하여 수신 신 호 모의가 가능하도록 개발한 소나 채널 모델을 사 용하였으며 공간 주파수 보간법을 이용한 수동형 합 성개구 신호처리 방법을 적용하였다. 수신 배열 센 서의 이동에 의한 도플러 효과를 고려하지 않는 경
(a) = 0 m/s (b) = 1 m/s
(c) = 2 m/s (d) = 3 m/s
(e) = 4 m/s (f) = 5 m/s
Fig. 6. Example of SAS processing results via spatial frequency domain interpolation assuming receiver array is not moving.
우 음원 위치에 오차가 발생하며 이동 속도에 비례 하여 위치 오차가 증가한다. 배열 센서의 이동을 고 려한 정합필터를 사용하는 경우 정확한 위치추정이
가능함을 확인하였으며 따라서 자율무인잠수정이 나 수중 예인체와 같이 1 m/s 이상의 일정한 속도로 이동하는 탑재체에 장착된 배열 센서와 정밀 위치
Fig. 7. Estimated position error vs receiver array moving speed (error resolution: 5 mm, blue line indicates estimation error bound).
Fig. 8. SAS processing results via spatial frequency domain interpolation considering sound field by a moving receiver array ( = 5 m/s).
탐지를 위한 합성개구소나 등의 신호처리를 이용하 는 경우 반드시 이동 속도에 의한 도플러 편이를 보 정해야 정밀도를 유지할 수 있음을 확인하였다.
감사의 글
본 논문은 한국해양과학기술원 부설 선박해양플랜 트연구소의 주요사업(계정번호: PES1940 및 PES2270) 으로 수행한 연구과제 결과 중 일부이다.
4. Kongsberg, High Resolution Interferometric Synthetic Aperture Sonar, http://www.km.kongsberg.com/ks/web/nokbg 0240.nsf/AllWeb/90CBC5D82A8F2A6CC125721F003360 C2?OpenDocument, 2016.
5. IxBlue Synthetic Aperture Side-scan Sonar, http://www.
ixblue.com/products/sams-dt6000, 2016.
6. R. E. Hansen, “Introduction to Synthetic Aperture Sonar,” in Sonar Systems, edited by N. Z. Kolev (InTech, Available from: http://www.intechopen.com/books/sonar-systems/, 2011).
7. T. O. Sæbø, Seafloor depth estimation by means of interferometric synthetic aperture sonar, (Ph. D. Thesis, University of Tromsø, 2010).
8. E. J. Sullivan, “Passive acoustic synthetic aperture processing,”
IEEE OES Letters 38, 21-24 (2003).
9. J. A. Fawcett, “Synthetic aperture processing for a towed array and a moving source,” J. Acoust. Soc. Am. 94, 2832-2837 (1993).
10. A. Hyun, A study on motion compensation for synthetic aperture sonar based on sub-aperture (in Korean), (Master thesis, Seoul National University, 2011).
11. K. Baik and P. L. Marston, “Comparison of synthetic aperture sonar images reconstructed from conventional linear and circular sensor array” (in Korean), Underwater Acoust.
Sympo. Suppl, 30, 15(2015).
12. S. M. Kim, S. H. Byun, and H. T. Choi, “Source localization in a tank with a moving hydrophone array,” International Conference on SAS and SAR (2014).
13. A. Hyun and W. Seong, “Multipath reduction for synthetic aperture sonar interferometry with 2xN array elements,”
International Conference on SAS and SAR (2014).
14. S. M. Kim, S. H. Byun, and H. T. Choi, “Development of an active/passive sonar simulator for the estimation of received signals with arbitrarily moving transducers and targets” (in Korean), Proceedings of the Korean Society of Ocean Engineers, (2014).
저자 약력
▸김 시 문 (Sea-Moon Kim)
1992년 2월: KAIST 기계공학과 학사 1994년 8월: KAIST 기계공학과 석사 2001년 2월: KAIST 기계공학과 박사 2001년 3월 ~ 현재: 한국해양과학기술원
부설 선박해양플랜트연구소 책임연구원 2006년 2월 ~ 2007년 2월: Scripps Institution of Oceanography, UCSD 방문연구원 (Visiting Scholar)
▸변 성 훈 (Sung-Hoon Byun)
1998년 2월: 서울대학교 조선해양공학과 학사
2000년 2월: 서울대학교 조선해양공학과 석사
2012년 8월: 서울대학교 조선해양공학과 2000년 8월 ~ 현재: 한국해양과학기술원 박사 부설 선박해양플랜트연구소 선임연구원 2014년 8월 ~ 2015년 8월: Georgia Institute
of Technology, 박사후연구원(Post Doc)
▸오 세 현 (Sehyun Oh)
2010년 8월: 한국해양대학교 해양공학과 2012년 8월: 한국해양대학교 해양공학과 학사
석사
2012년 8월 ~ 2014년 10월: 소나테크(주) 기술연구소 연구원
2014년 11월 ~ 현재: 한국해양과학기술원 부설 선박해양플랜트연구소 연구원